
Hybrid Physics-Based Adaptive Kalman Filter State Estimation Framework



Abstract
:1. Introduction
- The development of a hybrid state estimator framework, based on the Kalman Filter formulation, able to diagnosis measurement gross errors and sudden load changes automatically;
- The exploration of the asymmetry index as an anomaly discrimination method, assessing the DSE process in different piecewise stationary levels, which can be used in any family of Kalman Filters-like dynamic state estimators framework.
2. Dynamic State Estimation
2.1. Statement of the Discrete Kalman Filtering Problem
2.2. Solution of the Kalman Filtering problem
2.3. Bad Data Analysis
3. Dynamic State Estimation Formulation for Gross Error Analysis
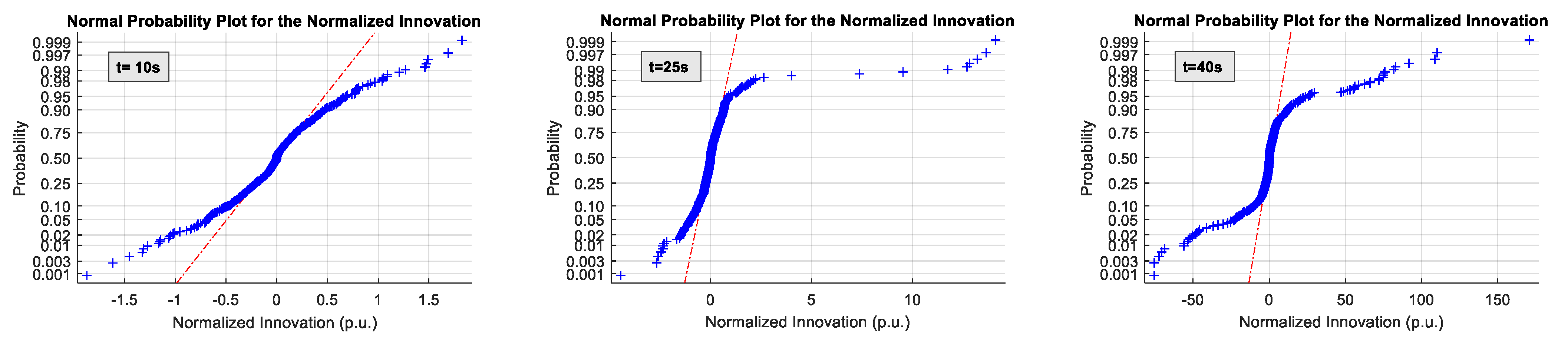
3.1. The Innovation in the Dynamic State Estimation Process
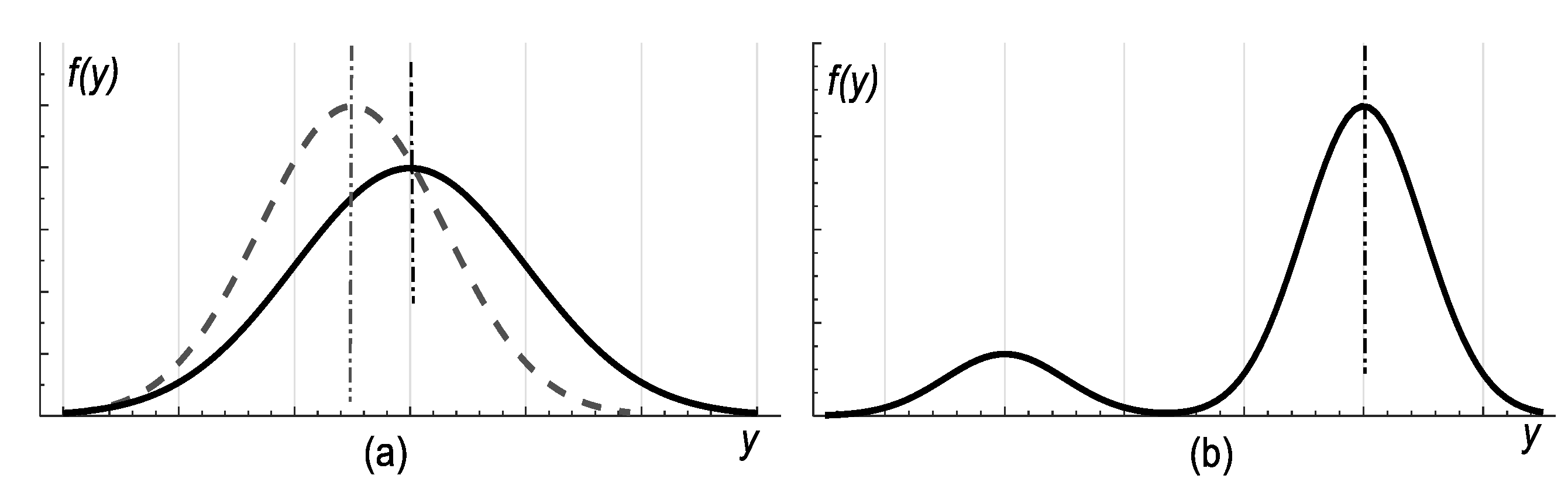
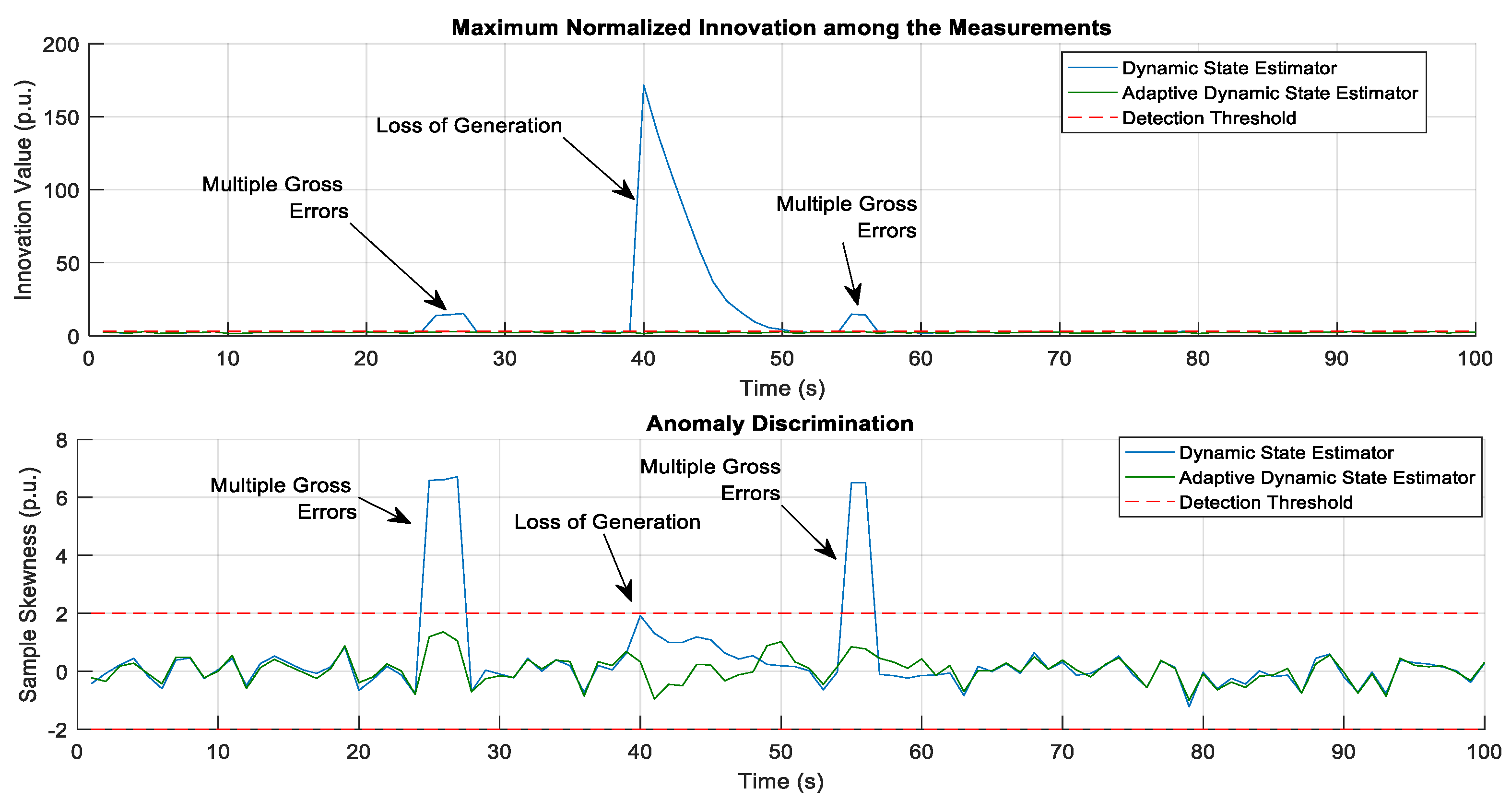
3.2. Anomaly Detection
3.3. Anomaly Discrimination and Adaption
- Measurement Gross error situation
- Suddenly state variable change
- If a gross error is detected (if and , the measurement with the largest normalized innovation is not considered, and the estimation process is repeated without this measurement;
- If a gross error is detected (if and , the estimation considers only the current snapshot of measurements, thus not considering the time relations between states, and the estimation process is repeated using a static estimator:
4. Presentation of Performed Tests and Analysis of Results
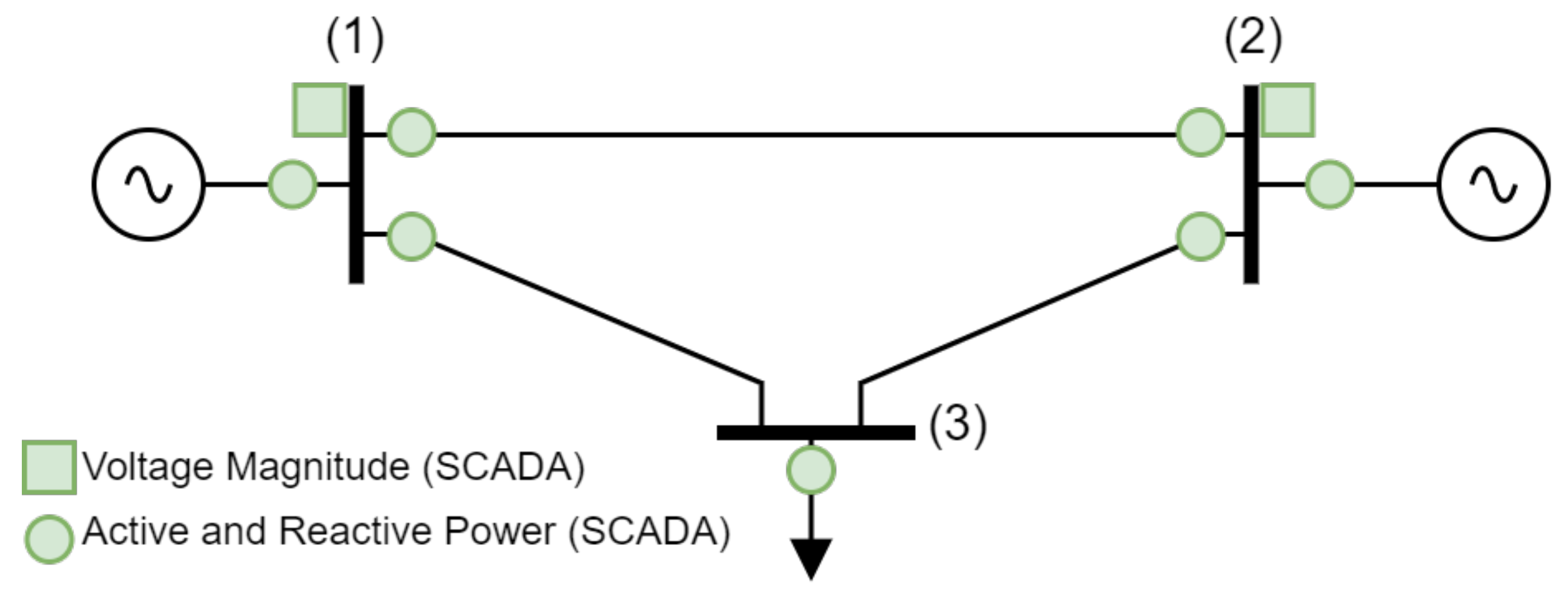
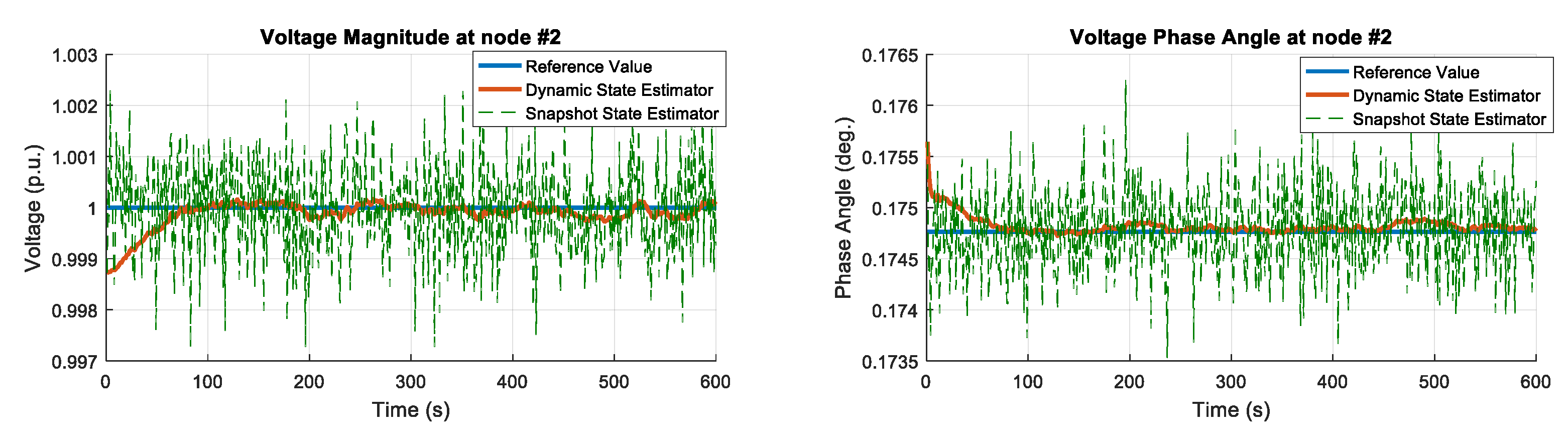
4.1. Conceptual Example and Asymptotic Performance of DSE
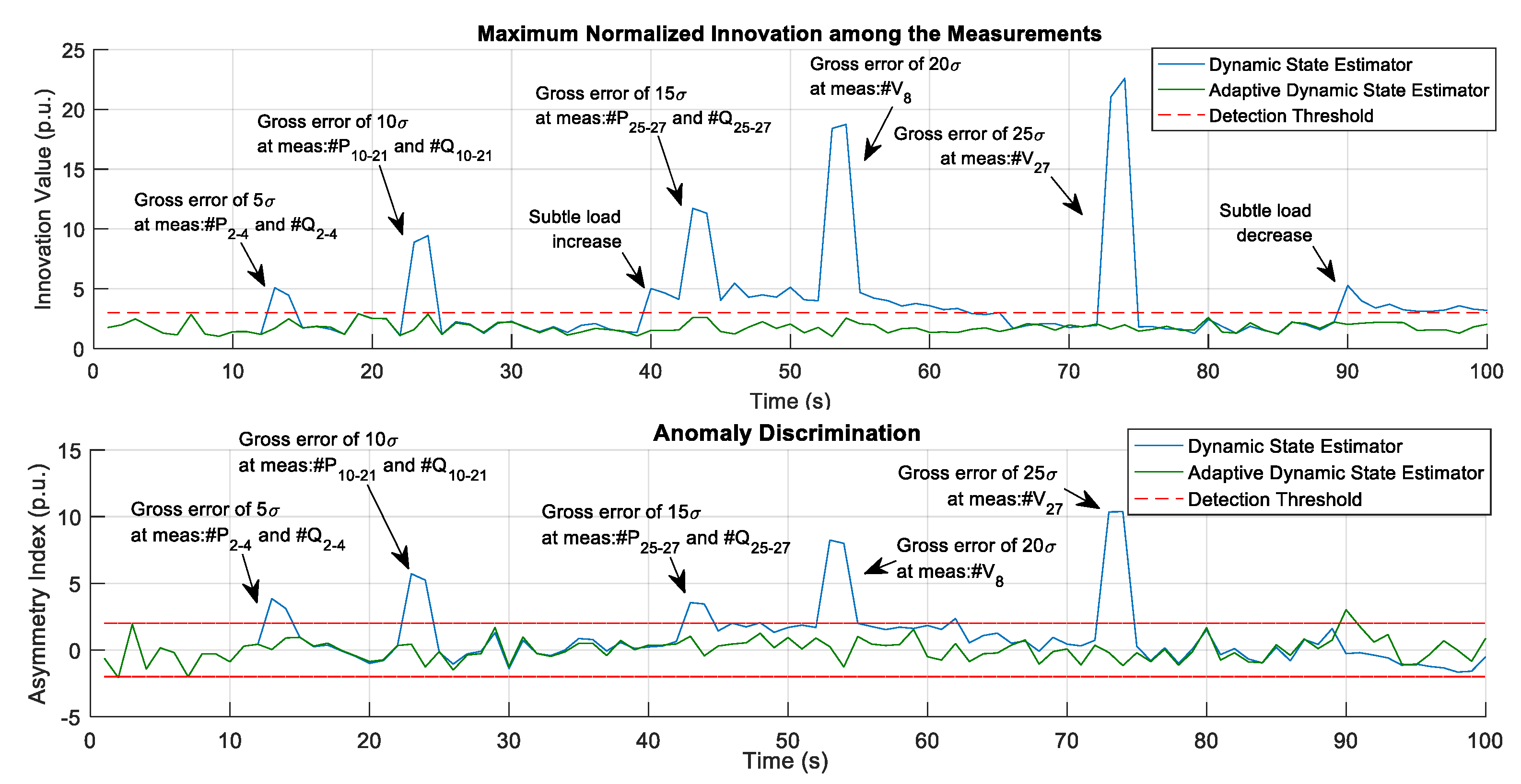
4.2. Performance of the Adaptive Dynamic State Estimator Algorithm
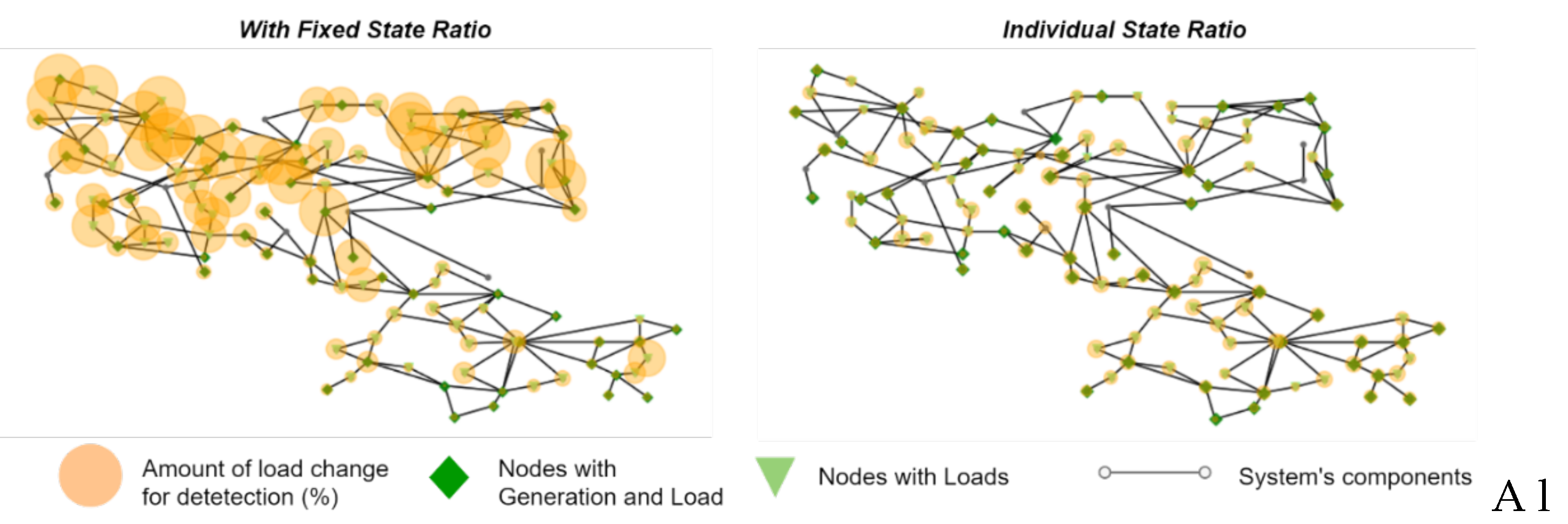
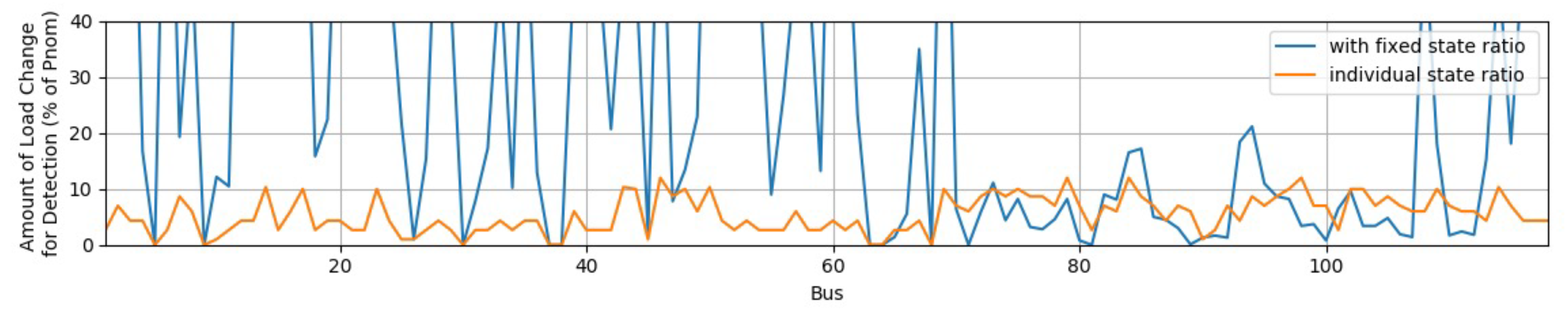
4.3. Effect of Process Noise and Anomalies Size
4.4. Effect of Different System Anomalies
4.5. Computational Aspects
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Power Systems Nonlinear Measurement Model

Appendix B. Three-Bus Test System Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage | Active | Reactive | Active | Reactive | ||
|---|---|---|---|---|---|---|
| Bus ID | Type | Setpoint | Generation | Generation | Load | Load |
| (p.u) | (MW) | (MVAr) | (MW) | (MVAr) | ||
| Bus 1 | 1.020 | 40.6 | 15.6 | - | - | |
| Bus 2 | PV | 1.000 | 57.0 | 14.4 | - | - |
| Bus 3 | PQ | - | - | - | 95.0 | 19.0 |
| Bus From | Bus To | Voltage Ratio | Resistance (%) | Reactance (%) | Nominal Reactive Loading (MVAr) |
|---|---|---|---|---|---|
| Bus 1 | Bus 2 | 1 | 1.95 | 5.90 | 5.30 |
| Bus 1 | Bus 2 | 1 | 5.40 | 22.30 | 4.90 |
| Bus 2 | Bus 3 | 1 | 4.70 | 19.80 | 4.40 |
References
- Bretas, A.S.; Bretas, N.G.; London, J.B.; Carvalho, B.E. Cyber-Physical Power Systems State Estimation; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Bretas, A.S.; Bretas, N.G.; Carvalho, B.; Baeyens, E.; Khargonekar, P.P. Smart grids cyber-physical security as a malicious data attack: An innovation approach. Electr. Power Syst. Res. 2017, 149, 210–219. [Google Scholar] [CrossRef]
- Zhao, J.; Netto, M.; Huang, Z.; Yu, S.S.; Gomez-Exposito, A.; Wang, S.; Kamwa, I.; Akhlaghi, S.; Mili, L.; Terzija, V.; et al. Roles of dynamic state estimation in power system modeling, monitoring and operation. IEEE Trans. Power Syst. 2020, 36, 2462–2472. [Google Scholar] [CrossRef]
- Rodriguez Paz, M.; Ferraz, R.; Bretas, A.S.; Leborgne, R. System unbalance and fault impedance effect on faulted distribution networks. Comput. Math. Appl. 2010, 60, 1105–1114. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Gómez-Expósito, A.; Netto, M.; Mili, L.; Abur, A.; Terzija, V.; Kamwa, I.; Pal, B.; Singh, A.K.; Qi, J.; et al. Power system dynamic state estimation: Motivations, definitions, methodologies, and future work. IEEE Trans. Power Syst. 2019, 34, 3188–3198. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. Trans. ASME—J. Basic Eng. 1960, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Debs, A.S.; Larson, R.E. A dynamic estimator for tracking the state of a power system. IEEE Trans. Power Appar. Syst. 1970, 89, 1670–1678. [Google Scholar] [CrossRef]
- Schweppe, F.; Masiello, R. A tracking static state estimator. IEEE Trans. Power Appar. Syst. 1971, 90, 1025–1033. [Google Scholar] [CrossRef]
- Nishiya, K.; Hasegawa, J.; Koike, T. Dynamic state estimation including anomaly detection and identification for power systems. Proc. IEEE 1982, 129, 192–198. [Google Scholar] [CrossRef]
- Falcao, D.; Cooke, P.; Brameller, A. Power system tracking state estimation and bad data processing. IEEE Trans. Power Appar. Syst. 1982, PAS-101, 325–333. [Google Scholar] [CrossRef]
- Bretas, N. An iterative dynamic state estimation and bad data processing. Int. J. Electr. Power Energy Syst. 1989, 11, 70–74. [Google Scholar] [CrossRef]
- Rousseaux, P.; Van Cutsem, T.; Liacco, T.D. Whither dynamic state estimation? Int. J. Electr. Power Energy Syst. 1990, 12, 104–116. [Google Scholar] [CrossRef]
- Sarri, S.; Zanni, L.; Popovic, M.; Le Boudec, J.Y.; Paolone, M. Performance assessment of linear state estimators using synchrophasor measurements. IEEE Trans. Instrum. Meas. 2016, 65, 535–548. [Google Scholar] [CrossRef]
- Fan, L.; Wehbe, Y. Extended Kalman filtering based real-time dynamic state and parameter estimation using PMU data. Electr. Power Syst. Res. 2013, 103, 168–177. [Google Scholar] [CrossRef]
- Valverde, G.; Terzija, V. Unscented Kalman filter for power system dynamic state estimation. IET Gener. Transm. Distrib. 2010, 5, 29–37. [Google Scholar] [CrossRef]
- Sharma, A.; Srivastava, S.C.; Chakrabarti, S. A cubature Kalman filter based power system dynamic state estimator. IEEE Trans. Instrum. Meas. 2017, 66, 2036–2045. [Google Scholar] [CrossRef]
- Massignan, J.A.; London, J.B.; Miranda, V. Tracking Power System State Evolution with Maximum-correntropy-based Extended Kalman Filter. J. Mod. Power Syst. Clean Energy 2020, 8, 616–626. [Google Scholar] [CrossRef]
- Zhou, N.; Meng, D.; Huang, Z.; Welch, G. Dynamic state estimation of a synchronous machine using PMU data: A comparative study. IEEE Trans. Smart Grid 2014, 6, 450–460. [Google Scholar] [CrossRef]
- Do Coutto Filho, M.B.; De Souza, J.C.S.; Guimaraens, M.A.R. Enhanced bad data processing by phasor-aided state estimation. IEEE Trans. Power Syst. 2014, 29, 2200–2209. [Google Scholar] [CrossRef]
- Durgaprasad, G.; Thakur, S. Robust dynamic state estimation of power systems based on M-estimation and realistic modeling of system dynamics. IEEE Trans. Power Syst. 1998, 13, 1331–1336. [Google Scholar] [CrossRef]
- Zhao, J.; Mili, L. A framework for robust hybrid state estimation with unknown measurement noise statistics. IEEE Trans. Ind. Inform. 2017, 14, 1866–1875. [Google Scholar] [CrossRef]
- Rouhani, A.; Abur, A. Linear phasor estimator assisted dynamic state estimation. IEEE Trans. Smart Grid 2016, 9, 211–219. [Google Scholar] [CrossRef]
- Zhao, J. Dynamic State Estimation With Model Uncertainties Using H∞ Extended Kalman Filter. IEEE Trans. Power Syst. 2017, 33, 1099–1100. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, Y.; Dinavahi, V.; Cao, S.; Hou, D. Adaptive robust cubature Kalman filter for power system dynamic state estimation against outliers. IEEE Access 2019, 7, 105872–105881. [Google Scholar] [CrossRef]
- Do Coutto Filho, M.B.; de Souza, J.C.S. Forecasting-aided state estimation—Part I: Panorama. IEEE Trans. Power Syst. 2009, 24, 1667–1677. [Google Scholar] [CrossRef]
- Castillo, M.R.; London, J.B.; Bretas, N.G.; Lefebvre, S.; Prévost, J.; Lambert, B. Offline detection, identification, and correction of branch parameter errors based on several measurement snapshots. IEEE Trans. Power Syst. 2010, 26, 870–877. [Google Scholar] [CrossRef]
- IEEE Transmission System Test Cases: IEEE14, IEEE30 and IEEE118. IEEE Test Systems. Available online: https://labs.ece.uw.edu/pstca/ (accessed on 15 August 2021).





| State Ratio | Discrimination Index | Sudden Load at Nodes: #3, #4, #15, #19 and #30 | ||||
|---|---|---|---|---|---|---|
| () | 1.00% | 2.00% | 3.00% | 5.00% | 10.00% | |
| = 0.01% | Max.Norm.Innovation | 2.2395 | 2.5890 | 2.9669 | 7.0648 | 14.7944 |
| Asymmetry Index | −0.7564 | 0.4354 | 0.2464 | 0.1318 | 0.1314 | |
| = 0.1% | Max.Norm.Innovation | 2.2472 | 1.6949 | 1.6857 | 3.1396 | 6.1013 |
| Asymmetry Index | −1.5551 | 0.5288 | 0.4443 | 0.6452 | 0.4482 | |
| = 1.0% | Max.Norm.Innovation | 2.2165 | 1.3483 | 1.3367 | 2.0801 | 3.2864 |
| Asymmetry Index | −1.6005 | 0.5130 | −0.0642 | 0.5933 | 1.0896 | |
| Load Variation | Maximum State Ratio in the State Covariance Matrix | ||||
|---|---|---|---|---|---|
| = 0.00% | = 0.01% | = 0.1% | = 1.0% | = 10.0% | |
| 0.00% | 8.9252 × 10−6 | 2.6840 × 10−5 | 7.9222 × 10−5 | 1.8912 × 10−4 | 2.3610 × 10−4 |
| 0.50% | 4.4572 × 10−4 | 2.9600 × 10−4 | 2.1010 × 10−4 | 1.9453 × 10−4 | 2.3684 × 10−4 |
| 1.00% | 12.1285 × 10−4 | 5.8336 × 10−4 | 3.7315 × 10−4 | 2.0537 × 10−4 | 2.3761 × 10−4 |
| 2.00% | 61.1972 × 10−4 | 11.6417 × 10−4 | 7.1472 × 10−4 | 2.3882 × 10−4 | 2.3922 × 10−4 |
| Test System | Prediction Step | Estimation Step | Anomaly Discrimination |
|---|---|---|---|
| IEEE14 | <1.0 ms | <1.0 ms | 1.9 ms |
| IEEE30 | <1.0 ms | 16.0 ms | 9.7 ms |
| IEEE118 | 15.2 ms | 360.0 ms | 18.4 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bretas, A.S.; Bretas, N.G.; Massignan, J.A.D.; London Junior, J.B.A. Hybrid Physics-Based Adaptive Kalman Filter State Estimation Framework. Energies 2021, 14, 6787. https://doi.org/10.3390/en14206787
Bretas AS, Bretas NG, Massignan JAD, London Junior JBA. Hybrid Physics-Based Adaptive Kalman Filter State Estimation Framework. Energies. 2021; 14(20):6787. https://doi.org/10.3390/en14206787
Chicago/Turabian StyleBretas, Arturo S., Newton G. Bretas, Julio A. D. Massignan, and João B. A. London Junior. 2021. "Hybrid Physics-Based Adaptive Kalman Filter State Estimation Framework" Energies 14, no. 20: 6787. https://doi.org/10.3390/en14206787