1. Introduction
The penetration of renewable energy (RE) in electric power grids is increasing rapidly worldwide. This growth is driven by ambitious renewable portfolio standards set by countries or regional jurisdictions to meet de-carbonization targets and decreasing costs of renewable generation. This higher penetration of inverter-based distributed energy resources (DER) presents challenges for grid operators [
1], e.g., displacement of synchronous generators reduces inertia, increases variability and uncertainty of the generation sources, and produces larger voltage fluctuations and frequency variations. Currently, the majority of DER devices are not monitored or controlled by grid operators. High numbers of DER may cause detrimental effects both during normal and contingency operations of the power system [
2].
Perturbations to voltage or frequency are experienced during power system faults. If these deviations trip DER, substantial generation would be lost and cause the power system to destabilize or operate with unplanned, expensive reserve generation. This concern was highlighted with the famous 50.2 Hz problem in Germany where several gigawatts of DER could have tripped offline due to minor over-frequency event; this generation loss could not be met by the conventional reserve capacities [
3]. Other examples exist in which DER tripped on voltage or frequency perturbations and caused challenges to power system operators. Approximately 1.2 GW and 900 MW of solar PV tripped offline in two different fault events (Blue Cut fire and Canyon Creek fire) in California during 2016 and 2017 respectively [
4,
5]. The tripping of the PV systems in both these California events was caused by the protection settings of these PV systems [
6].
To prevent these situations in the future and facilitate higher RE integration at distribution and transmission levels, grid codes around the world are being updated with new DER grid-support function (GSF) requirements. The American IEEE Std. 1547-2018 [
7], Canadian CSA C22.3 No. 9-2020 Std. [
8], and Australian/New Zealand AS/NZS 4777.2 Std. [
9] all include revisions to the voltage ride-through (VRT) and frequency ride-through (FRT) functions to keep DER operating during transient voltage and frequency disturbance events. IEEE 1547 requires DER either continue injecting power during the disturbance (a
RT) or restart current injection immediately after the disturbance (a
momentary cessation) depending on the voltage/frequency excursions from the nominal value based on the severity of the disturbance. By taking this approach, the RT function facilitates grid support during the fault and RE power for restoration after short disturbances by keeping DER connected to the grid.
Frequency excursions during the transient faults in the electric power system are characterized by the magnitude and rate of change of frequency (ROCOF). Most current electric power systems are synchronous machine dominated, therefore, the ROCOF value are typically in the range of 1–2 Hz/s [
10]. The study in [
11] shows that after a separation of the Ireland and Northern Ireland electrical systems resulted in a ROCOF of over 1 Hz/s in Ireland, and a ROCOF of over 2 Hz/s in Northern Ireland. As power systems move toward higher RE penetrations by offsetting traditional synchronous generators, there will be higher frequency disturbance ROCOF values [
1], e.g., a grid event in South Australia where ROCOF reached 6 Hz/s [
12]. Unfortunately, faster ROCOFs are more challenging for the DER inverter control loops to maintain synchronism with the power system [
10], e.g., [
12] reported experimental verification of residential PV inverters disconnecting due to ROCOF. So it is important to test the DER for operations with aggressive ROCOF values. IEEE 1547-2018 specifies ROCOF values of up to 3 Hz/s to ensure DER sustain synchronism during a rapid frequency deviation.
IEEE Std. 1547.1-2020 [
13] defines conformance test procedures for DER devices in the USA and was recently revised to align with IEEE Std. 1547-2018. To pass the test procedures in IEEE 1547.1, DER must comply with all the GSFs defined in IEEE 1547-2018. DER inverter industry stakeholders (i.e., DER vendors, grid operators, certification laboratories, and academic smart grid test laboratories) need appropriate testing tools to verify the power and communication characteristics for different GSFs. The IEEE 1547.1 test procedures typically include dozens, if not hundreds, of measurement points for each of the GSFs, so it is critical to automate the certification process to minimize certification costs, test durations, and risk of human error.
Recently, other jurisdictions are including grid-code compliance test requirements such as the IEEE 1547.1 standard. The Canadian CSA C22.3 No. 9 standard includes a section on compliance testing [
8]. In Australia and New Zealand, AS/NZS 4777.2 standard includes the testing requirement for the different GSFs of DER with detailed guideline such as the IEEE 1547.1 standard [
9], along with tests for multiple-unit operation, technology-specific DER devices, etc. Currently, the European standard EN 50549-10 is being developed to assess GSFs of DERs for low and medium voltage network connections [
14].
Several national research laboratories from different jurisdiction are collaborating within the Smart Grid International Research Facility Network (SIRFN) to evaluate GSFs of different DER devices [
15,
16,
17]. These evaluations have been completed by developing test scripts for different test protocols, i.e., UL 1741 SA [
16] and IEEE 1547.1. The SVP was used in these evaluations to automate the test sequences in Python environment. The SVP communicates with and controls AC grid simulators, PV simulators, Equipment Under Test (EUT) and data acquisition systems [
18]. The SVP is used to create the test results (e.g., raw data in CSV file format) along with a test manifest (e.g., log files) that are then summarized in a Microsoft Excel file to provide pass-fail tables and plots of the results. This testing framework helps the SIRFN group to assess new and developing grid codes and associated test procedures from different jurisdictions. The experimental results provide feedback to the standard development organizations for corrections and enhancements to the test procedures [
15,
16].
Many researchers have developed RT algorithms for DER devices [
19,
20,
21]. In their work, RT capabilities are usually tested by applying fault scenarios on a simulated AC grid. However, the RT algorithms are not tested to a standardized RT test procedure, such as those required of commercial DER device. During the standards development process, historical fault profiles were studied by the committees to create representative fault profiles to evaluate the DER products. This process was similar for the other GSFs. The recently published IEEE Std. 1547.1-2020 introduced type tests for response of voltage and frequency disturbance (i.e., VRT, FRT, phase-angle change RT), as well as different voltage regulation and frequency-support functions (e.g., frequency-droop, constant reactive power, active power–reactive power, etc.). Each of these tests were designed to evaluate the GSFs in representative—-albeit worst case-—scenarios that fielded DER were likely to encounter in their lifetimes. The SIRFN collaboration is assessing several solar PV inverters for these GSFs using the SVP, while PV inverter manufacturers are certifying their products with these latest requirements. Previously, the team developed many scripts for type tests in IEEE P1547.1 (Draft versions D9.6 & D9.9) and shared the test protocol evaluation findings with the IEEE standards development committee to help refine the standard before final publication [
15,
22,
23]. Now, after publication, this team is completing the IEEE 1547.1 open-source test scripts to accelerate the development and deployment of RE systems. Test facilities, DER vendors, and research institutions can use this software to perform certification test procedures.
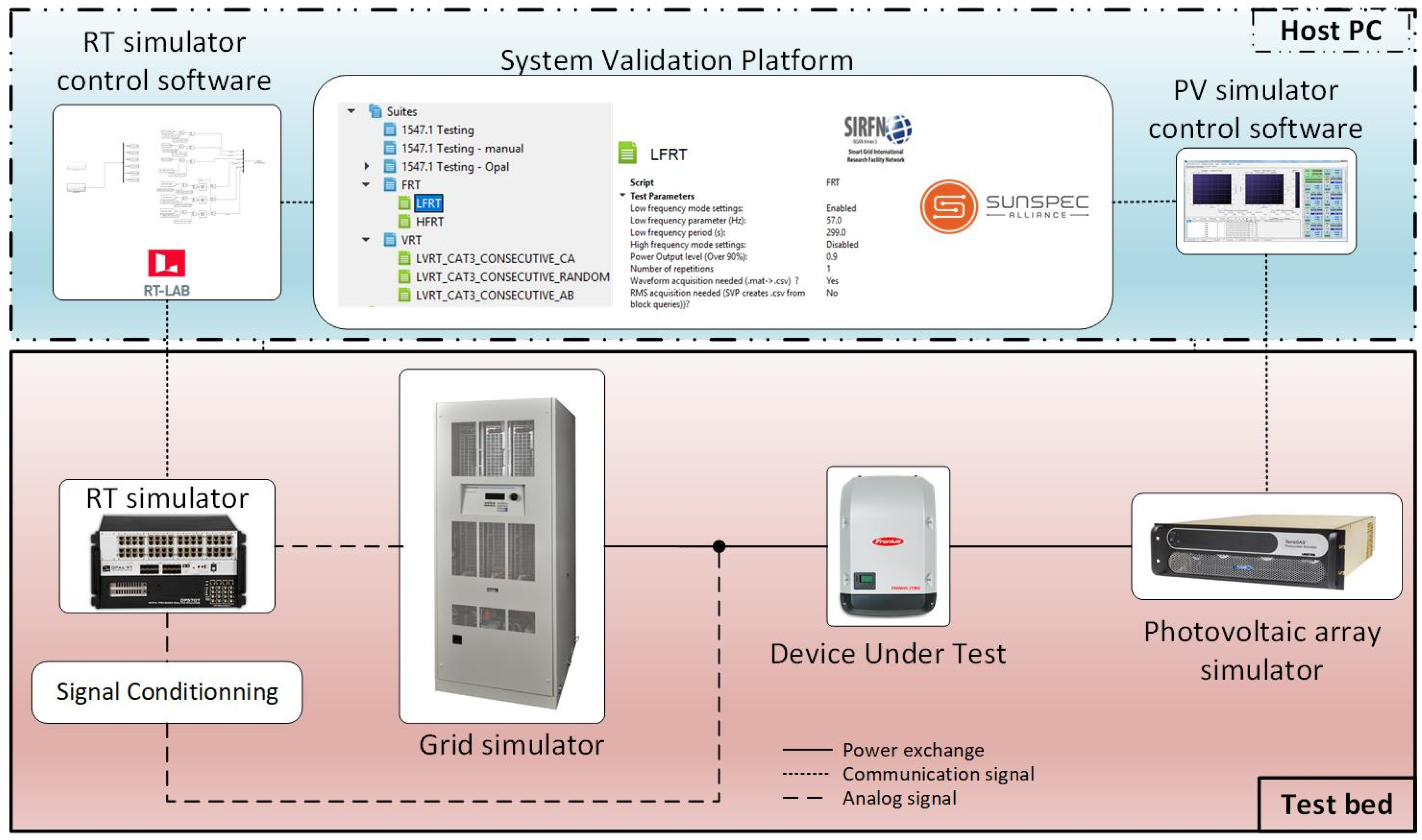
In terms of IEEE 1547.1 RT requirements, the standard requires commercial PV inverters to be tested with consecutive disturbances for both over and under frequency and voltage levels, at two different operating power levels based on the category of DER device. Generation of IEEE 1547.1-2020 RT results requires creating precise event triggers and capturing current and voltage waveform data. The FRT test also requires a controlled ROCOF of the applied voltage signal. To record precision data, an open-loop Power Hardware-in-the-Loop (PHIL)-based automated test setup (i.e., a signal-injection testbed) was created to evaluate commercial PV inverter compliance to the IEEE 1547.1-2020 RT criteria. The SIRFN labs developed open-source Python test scripts to drive the PHIL simulation to capture the VRT, FRT, and ROCOF RT function evaluations [
24]. The SVP test scripts compile and execute a MATLAB Simulink model in the Opal-RT simulator environment, RT-LAB, to achieve precise timing, generate the voltage signal disturbances (magnitude, phase and frequency), and capture waveform test result data. The SVP communicated to the PHIL environment using Opal-RT’s RT-Lab Python Application Programming Interface (API). In this paper, two commercial three-phase PV inverters with different nameplate capacities and configurations were assessed to the IEEE 1547.1 VRT and FRT test procedure. This PHIL-based platform allowed identification of potential improvements to increase test consistency and reliability across multiple test laboratories. The primary contributions from this work are: (a) creation of an open-source, frequency-adaptive RT-Lab Simulink model that can be used to perform VRT, FRT and ROCOF RT experiments, (b) the development of automated, open-source HIL certification scripts that reduce the burden of manual experimentation, and (c) the first-ever experimental comparison of IEEE 1547.1-2020 LVRT, HFRT, LFRT, and ROCOF RT results from two production DER devices.
2. IEEE 1547.1 VRT and FRT Test Requirements
The revised IEEE 1547-2018 standard specifies the DER requirements for different GSFs. These requirements may vary based on technology, application purpose, power generation variability, and the specific characteristics of the point of common coupling. Therefore, two types of performance category definition were adopted in the standard:
Category (Cat.) A and B are based on DER participation in the voltage and reactive power management. Cat. A requirements are minimum voltage support requirements for all state-of-the-art DER technologies, usually for low-RE penetration operations. Although Cat. B covers supplemental capabilities to address high-RE penetration operations of the electric grid. Cat. B devices include active power–reactive power and voltage–active power modes along with expanded reactive power capabilities.
Category I, II and III are based on disturbance RT capabilities for power system protection and power quality. Cat. I RT requirements are defined for synchronous machine-based DER based on the German Association of Energy and Water Industries (BDEW) standard for medium voltage synchronous generators [
25]. Cat. II requirements are based on the North American bulk power system (BPS) reliability standard, NERC PRC-024-2 [
26], but have much tighter operating bands than Cat. III. Cat. III goes beyond the ride-through requirements in NERC PRC-024-2 to add the widest disturbance ride-through capabilities, based on California Rule 21 [
27], applicable for inverter-based DERs in high-RE penetration grids.
The VRT capability of DER is the ability to RT voltage sags and swells without tripping the unit. Similarly, the FRT capability is the ability to RT the frequency excursions that are outside the normal range of operation. Voltage and frequency excursions outside the normal range of continuous operation require certain response characteristics from the DER depending on the magnitude and history of grid voltage or frequency. The types of DER operating modes during a RT event are:
Mandatory operation: DER shall maintain synchronism and continue active power exchange.
Permissive operation: DER may continue active power exchange or may cease to energize.
Momentary cessation (MC): DER shall cease to energize.
When the DER is in MC mode, it shall not trip and shall restore output following IEEE 1547-2018 Section 6.4.2.7, i.e., a DER without dynamic voltage support shall restart total active current injection of at least 80% of pre-disturbance active current level within 0.4 s. Additionally, the IEEE 1547.1 provides different methods for testing based on the DER technology. This article focuses on the testing of inverter-based DER.
2.1. Low Voltage RT Test
The purpose of the IEEE 1547.1 low voltage RT (LVRT) test is to verify the capability of the EUT to RT voltage sags without tripping. To properly assess the LVRT capability of the EUT, the undervoltage trip function is disabled or set to not influence the outcome of the test. Among all the different voltage support functions of the EUT, only the voltage-reactive power (volt-var) function shall be enabled with default parameters. The LVRT tests shall be conducted at two output power levels—one high (rating at greater than 90%) and one low (active power in between 25% and 50%)—with power factor greater than 0.90.
IEEE 1547.1-2020 standard presents the LVRT test signals that shall be applied on the EUT terminals for Cat. I, II and III EUTs, in accordance with the defined LVRT test conditions. The Cat. III LVRT test conditions are presented in
Table 1. The time frame of each test condition during the RT test is such that the low voltage is applied from a minimum of 1 s to a maximum of 120 s. The different modes of operation during the LVRT test are evaluated using consecutive RT tests where the LVRT test sequences are repeated without interruption as described in 5.4.4.3 of the standard. The LVRT capability of a three-phase EUT is assessed by applying the repeated voltage sag profile on all three phases simultaneously, at least one two-phase pair simultaneously, and at least one single phase individually. Based on the test results, the EUT is found compliant if it meets the requirements of the mandatory, permissive, and MC mode definitions from the previous section. In addition, during the mandatory operation, it shall maintain its total apparent current during the disturbance period at or above 80% of the pre-disturbance value.
2.2. High Voltage RT Test
The purpose of the high voltage RT (HVRT) test is to verify the capability of the EUT to RT voltage swells without tripping. The HVRT test has similar requirements and procedures to the LVRT test. To properly assess the HVRT capability of the EUT, the overvoltage trip function and voltage-reactive power (volt-var) function are programmed the same way as the LVRT test. The HVRT test is also conducted at two power levels such as the LVRT test. The IEEE 1547.1-2020 standard presents HVRT test signals in accordance with HVRT test conditions for different EUT categories. Again, the different modes of operation during the HVRT test are evaluated using consecutive RT tests. The three-phase EUT is tested at a minimum of three different voltage scenarios; three phases simultaneously, at least one two-phase pair simultaneously, and at least one single phase individually. Based on the test results, the EUT shall be HVRT compliant if it meets the requirements of the permissive and MC mode definitions from
Section 2.
2.3. Low Frequency RT Test
The purpose of the low frequency RT (LFRT) test is to verify the capability of the EUT to RT low frequency excursions (outside the normal range of operation) without tripping. The frequency trip settings are set to not influence the outcome of the test. The frequency-droop function is programmed for least aggressive settings to make the active power change with respect to frequency as small as possible. The test is conducted at a power level greater than or equal to 90% of EUT rating and the applied frequency variation during the test is greater than or equal to the ROCOF limit specified for the EUT Cat. III. Therefore, this test also verifies the ROCOF capability of the EUT. Based on the test results, the EUT is compliant if it maintains active power above the pre-disturbance active power output for a Cat. III EUT.
2.4. High Frequency RT Test
The purpose of the high frequency RT (HFRT) test is to verify the capability of the EUT to RT high frequency excursions (outside the normal range of operation) without tripping. The HFRT test has similar requirements for settings of trip function, droop and power level for testing, frequency variation following ROCOF, and compliance assessment.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}