1. Introduction
The expanding demand for energy and depletion of fossil fuel resources has lately raised several interests to meet the energy requirements. Solar energy is one of the most important renewable sources of energy that attract scientists’ efforts. The Photo-voltaic (PV) cell has widely used in converting solar energy into electrical energy. However, it requires a high cost for installation; it still has a long life, availability, and minor maintenance [
1].
The performance of the PV systems depends on the intensity of solar irradiance and the surrounding temperature. The optimum conditions for the operation of the PV system in terms of solar irradiation and temperature arearound
and
, respectively [
2].
The output characteristics of the PV modules can be represented by the relation between the PV module’s output power and its corresponding voltage. The PV system has one operating point on its power-against-voltage (P-V) curve [
3].
The maximum power point tracking (MPPT) systems consist of a DC-DC converter, a software program, and a Digital Signal Processing (DSP) unit [
4]. The qualification of the MPPT controllers depends on the speed at which the PV operating point intersectsthe P-V curve’s MPP with the lowest fluctuations and highest efficiency. During the controlling process, every MPPT system changes the duty cycle value that is fed to the converter by its strategy [
5]. These strategies still convergence until the operating point reaches the MPP. Hence, load can receive the maximum power from the PV modules [
6].
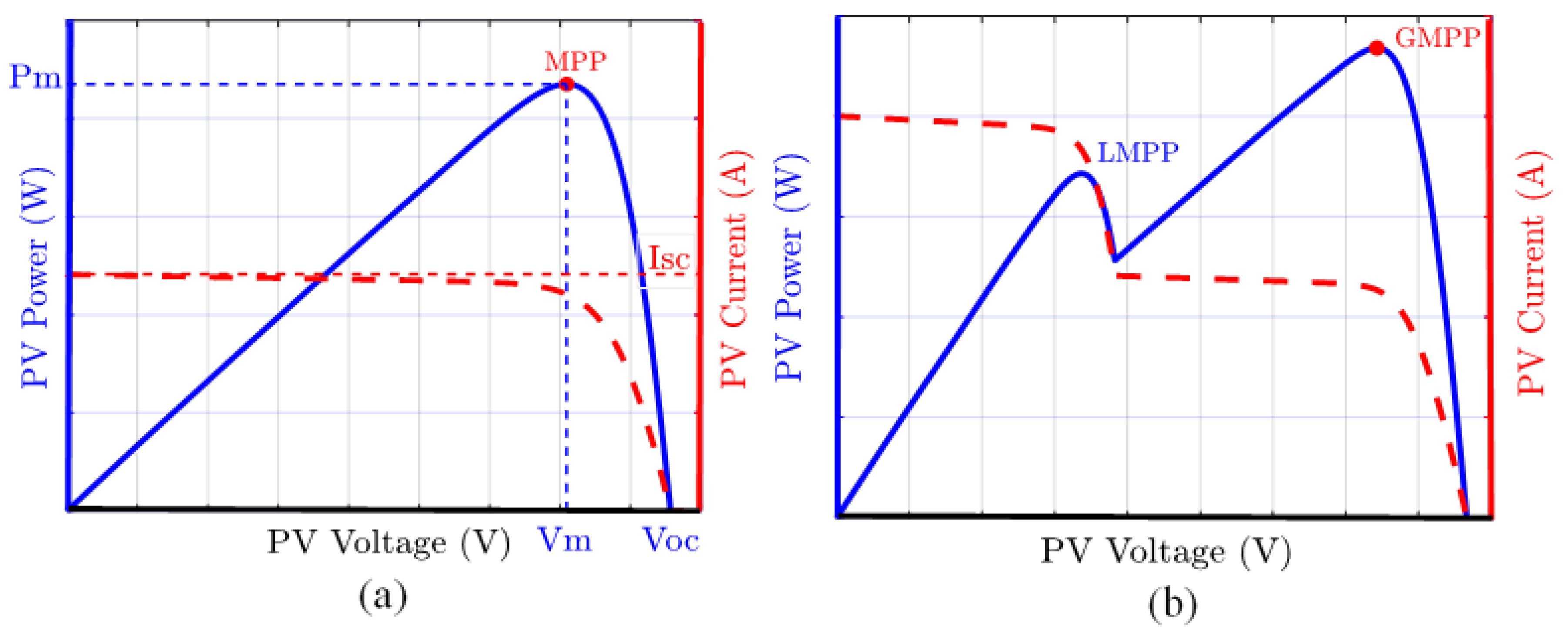
Under Uniform Irradiance (UI), all the PV modules inside the string receive the same solar irradiance and temperature. As a result, the PV modules operate effectively without damaging the modules’ cells, and the P-V curve has a single power peak on it, as shown in
Figure 1a [
7]. In this case, the conventional MPPT controllers can successfully reach and track that MPP. These controllersinclude Fractional Open-Circuit voltage (FOC), Fractional Short Circuit current (FSC) [
8], Perturb and Observe method (P&O) [
9,
10], and Incremental Conductance method (IC) [
11].
Under Partially Shaded Conditions (PSC), which occur when the PV string is exposed to nearby constructions, moving clouds, and adjacent trees, each PV module inside the string receives different solar irradiations and temperatures at the same time [
12]. The shaded PV cells inside the module consume a certain amount of power leads to form a hotspot that causes damage for the shady locations [
13]. The parallel connection of the PV module with an opposite polarity bypass diode is considered an excellent solution to the hotspot problem. On the other hand, the bypass diode affects the P-V curve characteristics by forming many power peaks [
14]. These power peaks include one Global Max Power Peak (GMPP) and many other Local Power Peaks (LPPs), as shown in
Figure 1b [
15]. The conventional MPPT controllers may be deceived and tracked the first LMPP encountered and treated as the MPP without observing the existence of the GMPP [
16].Various partial shading mitigation techniques have been introduced and classified into two significant categories named hardware-mitigation techniques and software-mitigation techniques [
17].
The hardware-mitigation techniques include the use of bypass and blocking diodes [
18], modification of the PV modules interconnections [
19], and novel DC-DC converters [
20,
21]. However, they have some disadvantages, such as large size, the complexity of the interconnections, and relatively longer time for testing in laboratories.
The software mitigation techniques include stand-alone soft computing techniques or a half-breed with a conventional one. Different types of Artificial Intelligent (AI) techniques have been used [
22], such as Artificial Neural Network (ANN), that require the employment of additional sensors to follow the change in climate conditions [
23], Fuzzy Logic Control (FLC) that has a high complexity degree of fuzzy rules and requires previous knowledge about the system [
24], and Genetic Algorithm (GA) that has a pretty high time waste for calculations which reduces the convergence speed [
25]. Moreover, different types of metaheuristic algorithms have been employed for MPPT applications. Some of these algorithms are the Flower Pollination Algorithm (FPA) [
26], AntColony Optimization (ACO) [
27], Particle Swarm Optimization (PSO) [
28], and Artificial Bee Colony (ABC). Despite these methods’ efficiency, they are challenging to implement, especially in tuning the governing equations parameters [
29].
In extension to the above methods, the Cuckoo Search Algorithm (CSA) has more regular convergence, records of higher efficiency, and requires lesser tuning parameters. Despite these properties, random steps can increase the total tracking time. This paper introduced an Improved Cuckoo Search Algorithm (ICSA) for PV string MPPT under PSC, which successfully overcame the disadvantages raised by the methods of the previous discussion. This presented controller can track the GMPP under PSC without tuning parameters. It depends upon avoiding part of the exploration area after each iteration until the GMPP is captured and tracked. As a result, the GMPP is successfully tracked with minimum time spend, minimum oscillation at the transient state, and is more stable at steady state comparedwith the other methods.
To illustrate that new contribution, the Materials and Methods has been introduced in
Section 2, and the Results and Discussion has been presented in
Section 3. Finally, the conclusions are recorded in
Section 4.
2. Materials and Methods
2.1. Modeling of Solar PV Module
Modeling of the solar PV module helps to envision its performance and predict its features under different climatic conditions.
2.1.1. Under Uniform Irradiance (UI)
In the case of UI, two PV modules are connected in series to form string-1, and each receives the same solar irradiance. The string’s PV modules are forward biased, and the same current passes through it. The bypass diodes connected in parallel with these modules are reverse biased and are virtually an open circuit, as shown in
Figure 2 [
29,
30,
31].
The PV string current-against-voltage (I-V) curve ranges from the short circuit current to zero current at the open circuit condition. The maximum output voltage is available at the open circuit condition. In addition, the maximum output current appears at the short circuit condition. The PV string’s max power point is located somewhere among these two conditions, as clarified by the P-V characteristics curve in
Figure 1a [
32].
The PV cell has a simulated equivalent circuit that consists of a current source, diode, series resistance, and shunt resistance, as shown in
Figure 3a. During darkness, the PV cell works as a diode without producing any voltage or current. If this diode connected to an external voltage supply, it generates a current that is called the diode current (
) [
33].
Applying Kirchhoff’s Current Law for the PV cell equivalent circuit, then, the mathematical equation of the PV cell output current can be represented by [
33].
In addition,
where
is the solar cell short circuit current at reference irradiance and temperature,
is the short circuit current temperature coefficient,
is the absolute temperature of the PV cell,
is the reference temperature (298 Kelvin), and
is the solar irradiance in
[
33].
Additionally,
where
is the diode saturation current,
is the electron charge
,
is the number of series PV cells in the module,
is the number of parallel PV cells in the module,
is the diode ideality factor, and
is the Boltzmann constant
[
34].
Moreover
and
where
is the cell reverse saturation current,
is the bandgap energy
, and
is the open-circuit voltage of the PV cell [
34].
In addition,
where
is the internal shunt resistance of the PV cell, and
is the internal series resistance of the PV cell.
2.1.2. Under Partial Shading Conditions (PSC)
In the case of PSC, two PV modules are connected in series to form string-2 as shown in
Figure 2. One of them has a fully solar irradiance, and the other one is shaded. The shaded PV module’s short circuit current fails rapidly to zero and acts as a reverse-biased diode. The current of the non-shaded PV module causes a voltage drop across the shaded PV module. This voltage drop has a negative value and forms a hotspot on the shady location. The hotspot not only reduces the PV module efficiency but also shortens its lifetime. However, the parallel connection of the opposite polarity bypass diode prevents the shaded PV module from damage. It becomes a forward-biased diode, which allows the excess current of the non-shaded module to pass through it. This bypass operation changes the P-V’s characteristics curve by forming many power peaks on it, as shown in
Figure 1b [
35].
Figure 3b shows the equivalent circuit of the PV string under PSC.
2.2. CSA Idea and Its Implementation for MPPT Controller
2.2.1. The Main Idea of the CSA
The CSA is a great optimization algorithm inspired by nature and proposed by Yang and Deb in 2009 [
36]. Latterly, it has been used with success in optimizing many applications and has achieved high performance. The cuckoo birds’ reproductive strategy is the basic idea that was used to construct that algorithm. To elaborate, the female cuckoo bird smartly looks for a random and fitting nest to host its eggs after it lays it. This process represents the algorithm’s searching for the optimal solution in the exploration area. There are some probabilities that the host bird may discover the strange eggs. In this case, it will either destroy them or abandon the nest and search for another one. This process represents the algorithm’s finding weak solutions and requires searching again for better solutions. The hatching and release of the production to life are the criteria for the success of the whole process. This process represents the algorithm’s finding the optimum solutions [
37].
2.2.2. The CSA as a Candidate for MPPT Controller
The designers used the
le’vy flight distribution equation to update the range of cuckoo’s random walking steps and stochastic shift direction during their search operation. This searching and optimization strategy can be used in solving several engineering problems, such as optimal reactive power scheduling [
38], distribution network reconfiguration for power loss minimization and voltage profile improvement [
39], capacitor allocations in radial distribution networks [
40], and structural design optimization of vehicle components [
41].
It can be also deal with the labyrinth of numerous power peaks in the PV systems’ outputs which portrayed in
Figure 1b. It also helps in avoiding the slowly methods depend on scanning the P-V curve to reach and track the GMPP, as well as the possibility of processing the deception process in terms of tracking the LMPP.
Moreover, it performed quickly with minimum power oscillations. By that, the classical CSA has been successfully used in the PV systems’ MPPT controller, and the results havebeen discussed in References [
28,
42].
There are three bases that designers relied on to build the classical CSA algorithm. The first base is every time each one of the cuckoo birds lays one egg in a randomly chosen nest. This base is applied by the MPPT-algorithm generation of a specific number of duty cycles and sent one-by-one to the boost converter.
In the second base, the most suited nest with high-quality eggs will develop into mature birds for the next generation. This base is applied by the MPPTalgorithm’s choosing for the current best duty cycle and uses it in the next iteration.
In the third base, the number of possible nests is specified, and the number of discovered nests maintains a probability
P ∈ [0, 1]. In the MPPTalgorithm, each iteration has a specific number of samples. After the evaluation process, the duty cycle corresponding to the worst power value may be rejected (destroyed) with a probability of
P ∈ [0, 1]. Indemnity to that, a new duty cycle sample will be generated and evaluated to replace the rejected one. The algorithm continues to estimate until all samples reach the GMPP [
37].
The steps obeyed by the CSA to track the GMPP can be normalized as follows:
Step-1: The CSA initialized (n) random samples of duty cycles and fed them one by one to the DC-DC converter.
Step-2: The PV system’s output current and voltage are measured for each duty cycle sample, and the power values are calculated and stored.
Step-3: The algorithm specifies the duty cycles (Ds) corresponding to the max power value and the min power value as the current best duty cycle sample and the worst duty cycle sample , respectively, for the current iteration.
Step-4: The algorithm tested whether the condition is true. If it is satisfied, the algorithm begins to replace the worst duty cycle sample with a newly generated one. Then, for the newly developed duty cycle, the PV output power is calculated, and the current best duty cycle value is updated.
Step-5: The algorithm startedto use the following
le’vy flight equation to generate new
duty cycle samples and fed them one-by-one to the DC-DC converter.
where
The
le’vy flight distribution equation can be simplified as
where
k is the
le’vy multiplying coefficient,
, while
and
u are fined from the normal distribution curve and can be expressed as:
The variables
can be calculated from:
where
is the integral gamma function [
37].
Step-6: The algorithm calculates and stores the output power values for each new sample again. If all samples reach the GMPP, the algorithm stops its iteration and sends the global best duty cycle to the DC-DC converter. If not, the algorithm starts the next iteration by returning to step number three.
2.3. The Proposed Improved Cuckoo Search Algorithm (ICSA) Performance
The essential predicament in using the conventional CSA for the MPPT controller can be traced back to the size of the search steps resulting from utilizing the le’vy flight distribution equation.
During the exploration phase, the search steps contain clusters of long jumps punctuated by several short steps, as shown in
Figure 4 [
43].
This leads to two effective problems that are easily noticeable. First, the long jump (significant change in the duty cycle value) may lead to losing the right path towards the GMPP. It is still followed by short steps (shallow change in the duty cycle value), which lead to a verylow corresponded change in the PV module operating voltage.
Second, these steps shape may lead to research for the solution in the vicinity of a previously explored area. Thus, more iterations are required to reach the GMPP, and, during that, a bad power oscillation will transfer to the load.
Despite these, both problems can be solved by thoroughly observing the trends in several different P-V curves under uniform irradiance or partial shading conditions. From that, the proposed algorithm was designed to provide the CSA with three cumulative ideas to improve its performance in trapping and tracking the GMPP.
These ideas can be sequenced as follows:reducing the exploration area by updating its boundaries after each iteration, and replacing the worst nest (worst duty cycle sample) with another to search within the promoted site. Finally, the algorithm redirects the duty cycle samples created outside the new boundaries into the more advanced search area.
Unfortunately, there is some discrepancy in the literature on CSA. In later publications on CSA, the descriptions of the algorithm are not entirely consistent with the initial as noted by Reference [
28], and discrepancies between the description and implementationsometimes exist even within the same reference, as in the case of Reference [
44], The CSA described and used in this work is based on the MATLAB code similar to Reference [
45]; the same version of the CSA can also be found in Reference [
45].
The objective function for the CSA-based MPPT aims to maximize the PV output power by varying the duty cycle valuesthat feed one-by-one to the interface converter in the range of [0, 1]. The objective function, decision variable, and constraint can be formulated in Equations (12)–(14), respectively.
The proposed CSA suffices with using a population size of n = 5 (five samples of duty cycles). The values of the duty cycles limits are set to be from 0 to 1. These limits contain the real values at which the converter’s switch can be triggered.
The number of generations is differentfrom one case to other, according to the deformation of the P-V curve. So, the proposed improved CSA stops its generation when all populations (duty cycles) reach the same values (the optimum solutions), according to Equation (15).
2.3.1. Reduce the ExplorationArea after each Iteration
After each iteration, the proposed algorithm modified the exploration area boundaries by adding the inferred conditions listed in
Table 1,
Table 2 and
Table 3 to the CSA performance. These conditions commutatively succeed after beginning with evenly spreading duty cycle samples (
,
,
,
,
) to cover the entire P-V curve in the first iteration, as shown in
Figure 5a.
Then, iteratively, the duty cycles
, voltages
, and powers
values are stored in a
matrix, in descending order, according to the iteration’s operating voltage values. The matrix rows are marked by the characters (A, B, C, D, and E), as shown in
Figure 5b.
The upper and lower subscript for the duty cycle indicates the number of iteration and the sample number, respectively.
Now, the arranged voltage values achieve:
The operating voltage
stored in the matrix’s row “
C” is the middle voltage value located on the P-V curve. Its corresponding power value
is considered the reference power value for the present iteration, as shown in
Figure 5.
The reference power value divides the exploration area into two asymmetric regions. The boundaries of each region are decreased towards the optimum solution after each iteration. These decreasedoperations can be achieved by checking the relationship between the reference power value and the other iteration’s power values. This relationship can be classified into three main conditions.
In the first condition, where the reference power value is the highest, the probability of finding GMPP around the reference power region is higher than that of the surrounding region around the lesser other powers’ values.
From that, the proposed algorithm neglects the area in which the GMPP is unlikely to be found and sets the voltage
or
to be the new exploration area limit, as described in
Table 1.
In the second condition, the reference power value is neither the highest nor the lowest power values in that iteration. In this case, the proposed algorithm promotes the area between the reference power value and the highest power value for the next search operation, as described in
Table 2.
In the third condition, the value of the reference power is the lowest. The proposed algorithm repeats the search inside the allsearch area, as described in
Table 3.
2.3.2. Replace the Worst Nest (Worst Duty Cycle Sample) with the Better One
During the procedure of the proposed method, the algorithm stores the highest two power values and their corresponding duty cycles
and
. These values can be used to complete the algorithm performance and prevent the dismissal of the exploration area that contains the optimum solution. After each iteration, the algorithm replaces the worst solution (discovered nest) with another duty cycle value, mediating the distance between the two highest power values, and calculated by Equation (17), as shown in
Figure 6.
2.3.3. Redirect the Samples Created outside the New Exploration Area’s Boundaries
Iteratively, the duty cycles
and
are updated, and the ICSA begins to generate new samples of duty cycles by using Equation (7). If any duty cycle sample is generated outside the boundaries of the new exploration area, the algorithm replaces that sample with another one that mediates the values of the fitnessduty cycles
and
by using Equation (17), as shown in
Figure 6.
The flowchart of the proposed technique can be simplified, as in
Figure 7.
4. Conclusions
Theproposed technique presented in this article adds an effective mechanism to the classical Cuckoo Search Algorithm performance to improve the PV systems’ Global Max Power Point Tracking. This mechanism updates the boundaries of the exploration area after each iteration by promotingthe exploration area containing the high-quality solutions and excludingthe exploration area containing the poor solutions. The simulation results showed the performance of the proposed technique in the first four iterations, as well as the waveform trajectory towards the GMPP, for several different models. On the other hand, an experimental setup compared the performance of the proposed technique with both the classical CSA and the P&O method. The results indicate that the proposed technique has a minimum tracking time with high output power stability at the steady-state condition, especially at the partial shading conditions.
The proposed CSA offers a better response than the classical one for both the settling time and output oscillations. These achievements are mainly due to the novel proposed scan period sectionalizing. The fear from misconvergence in the investigated optimization problem is of less importance in this case. The core of the proposed technique relies on the fact that reducing the exploration area is based on maximizing the overall PV string power, continuously taking into consideration the dynamic array voltage variation and avoiding less probability search areas, hence avoiding the misconvergence. It is better to declare that this benefit is application specific and needs better knowledge of the investigated problem practical dynamics. Hence, the authors cannot guarantee its applicability for different applications unless deeply investigated.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







