
Fault-Tolerant Cooperative Control of Large-Scale Wind Farms and Wind Farm Clusters




Abstract
:
1. Introduction
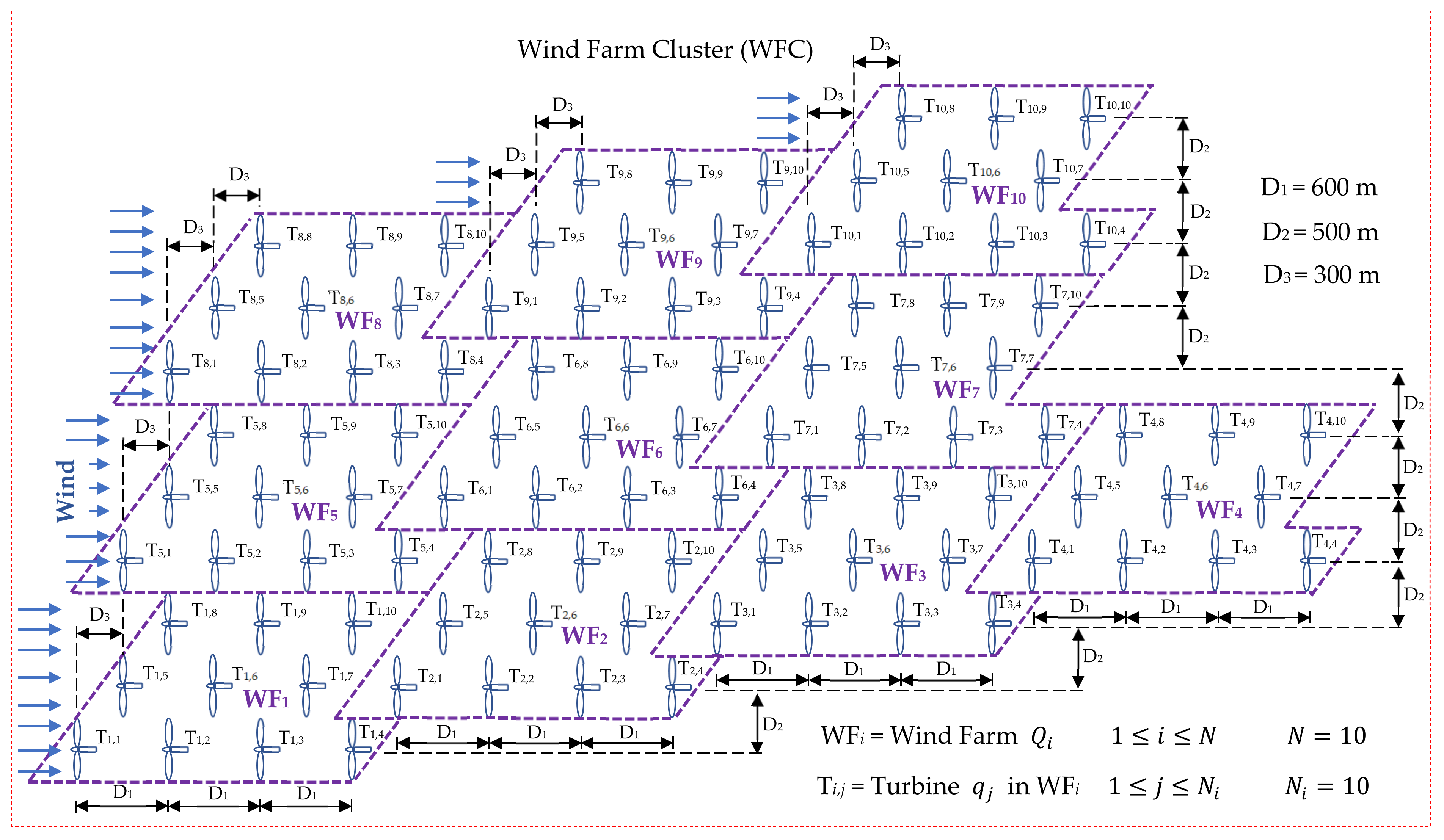
2. WFC Benchmark and Power-Loss Faults
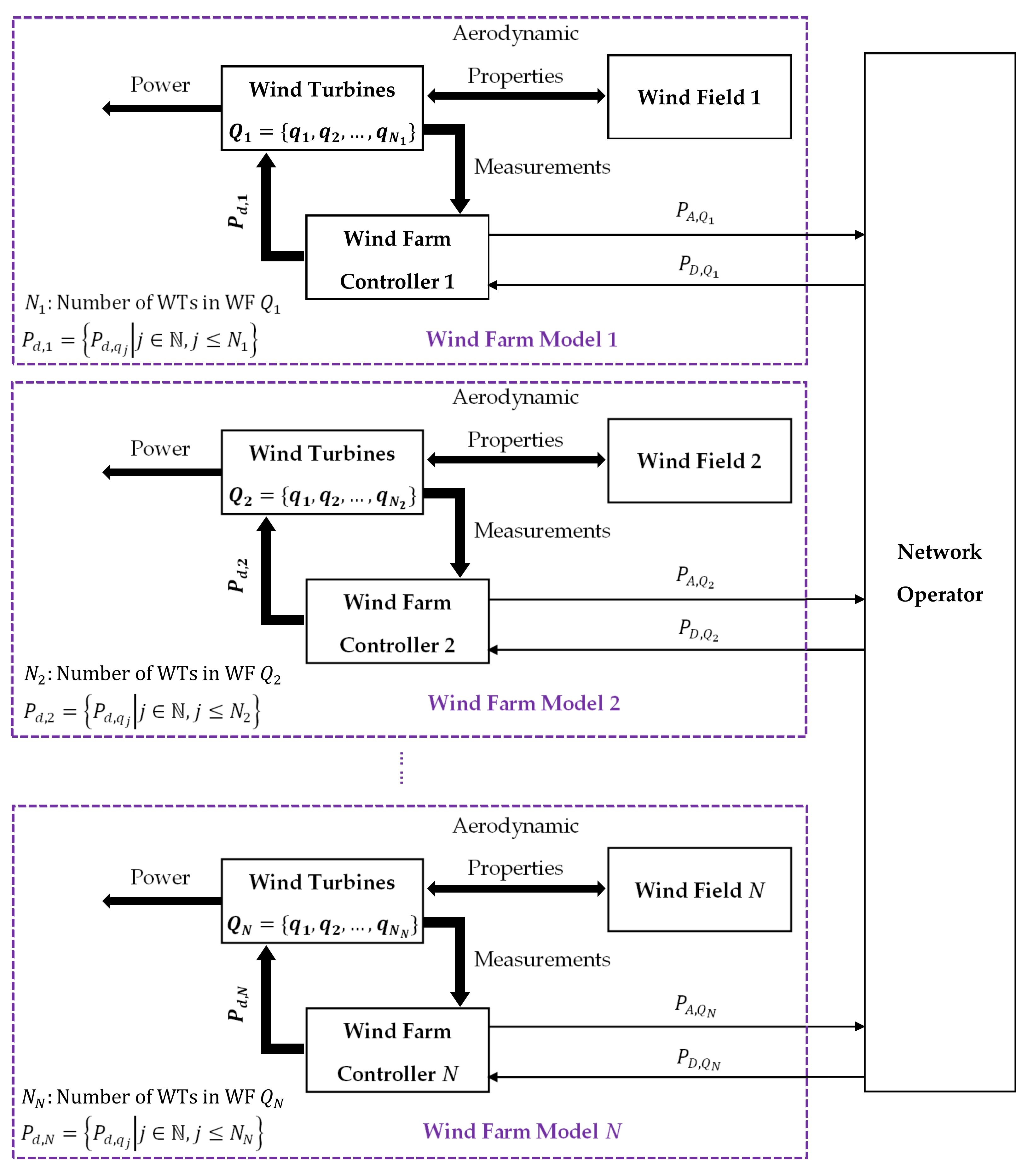
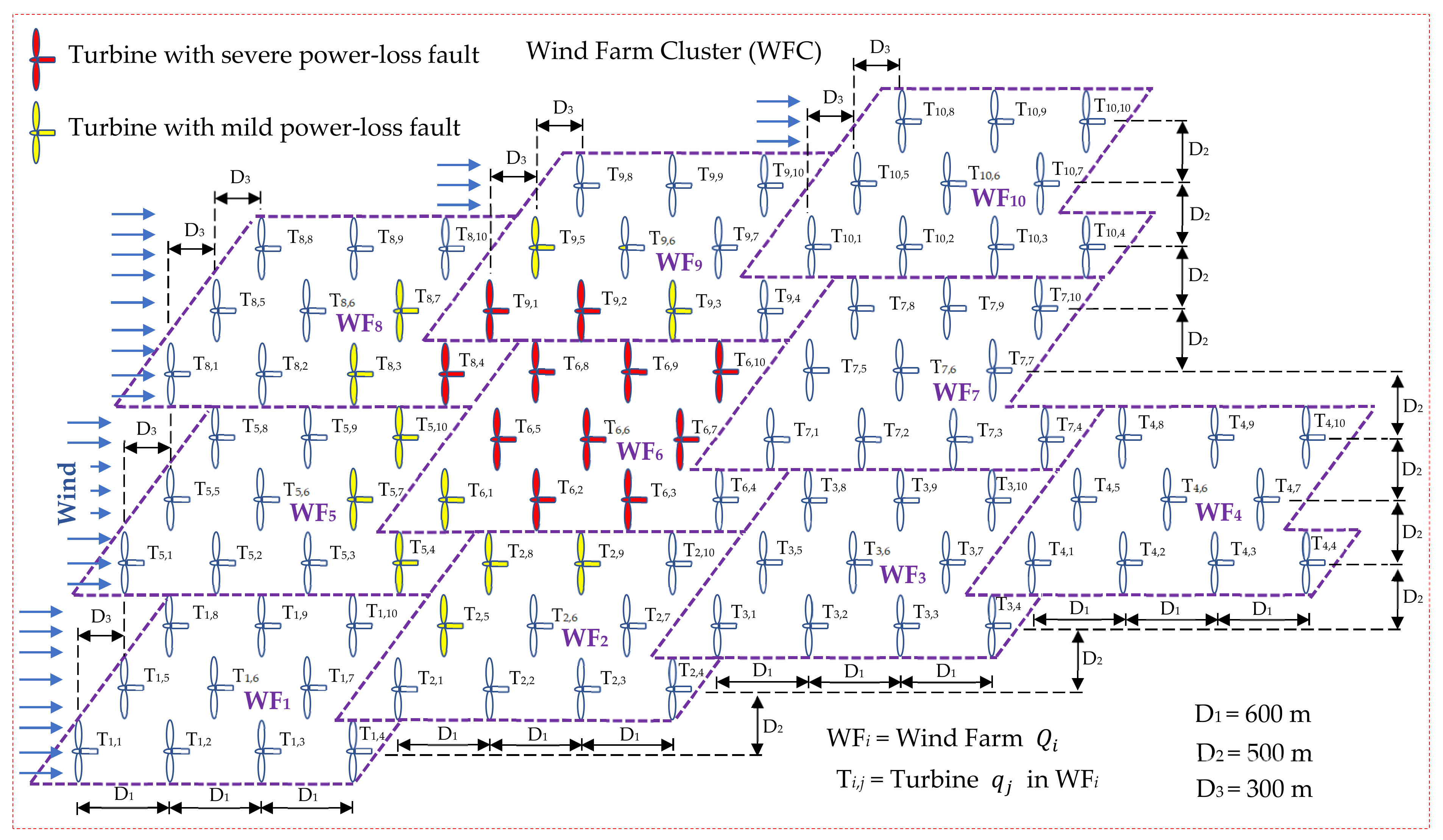
2.1. Benchmark Components
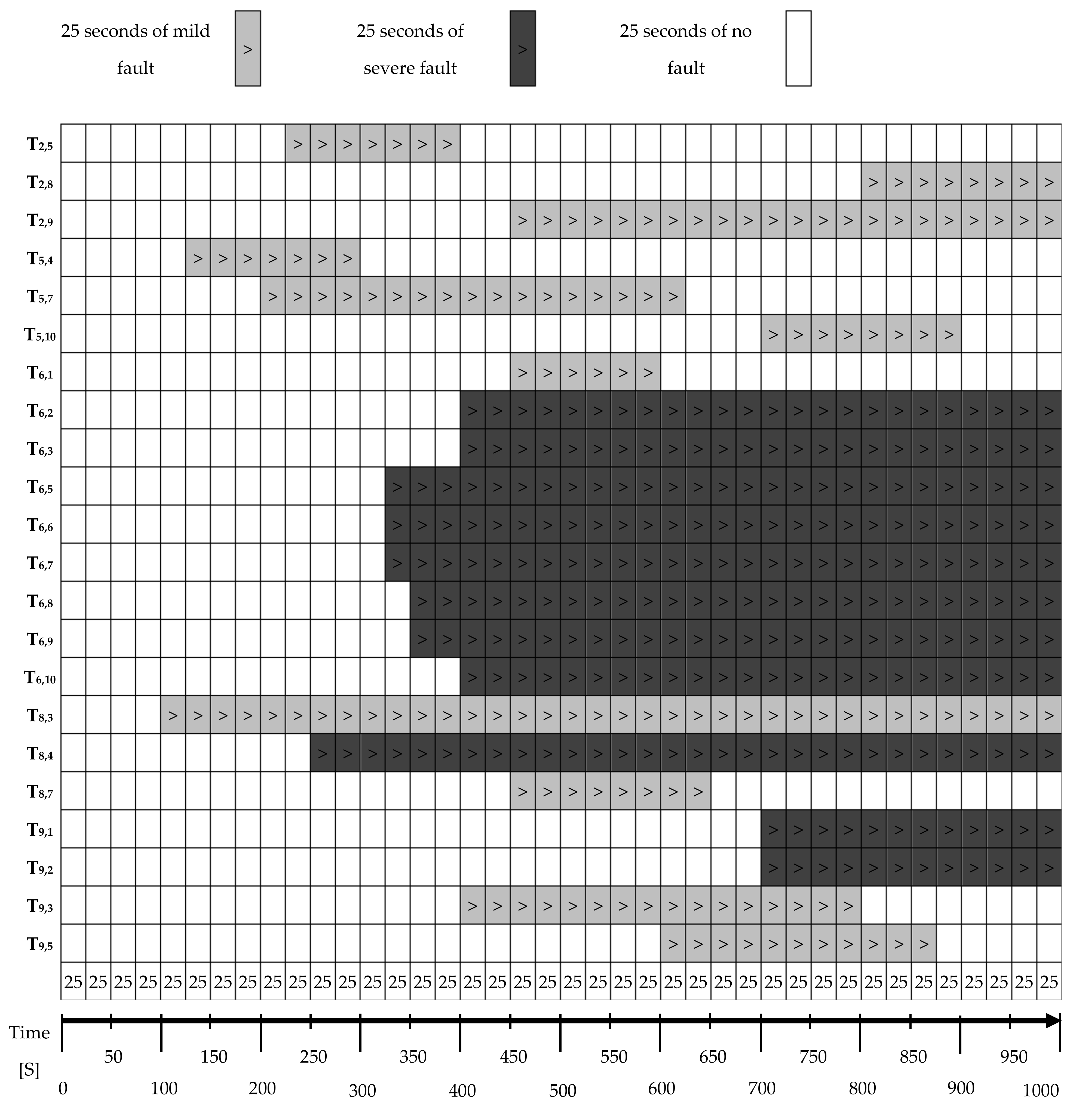
2.2. Power-Loss Faults
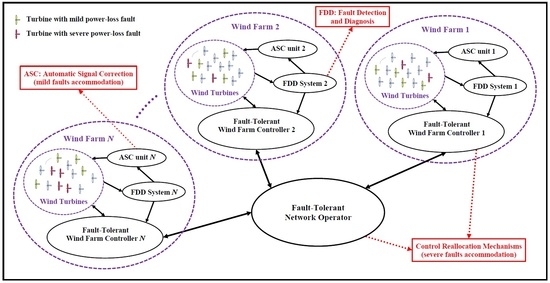
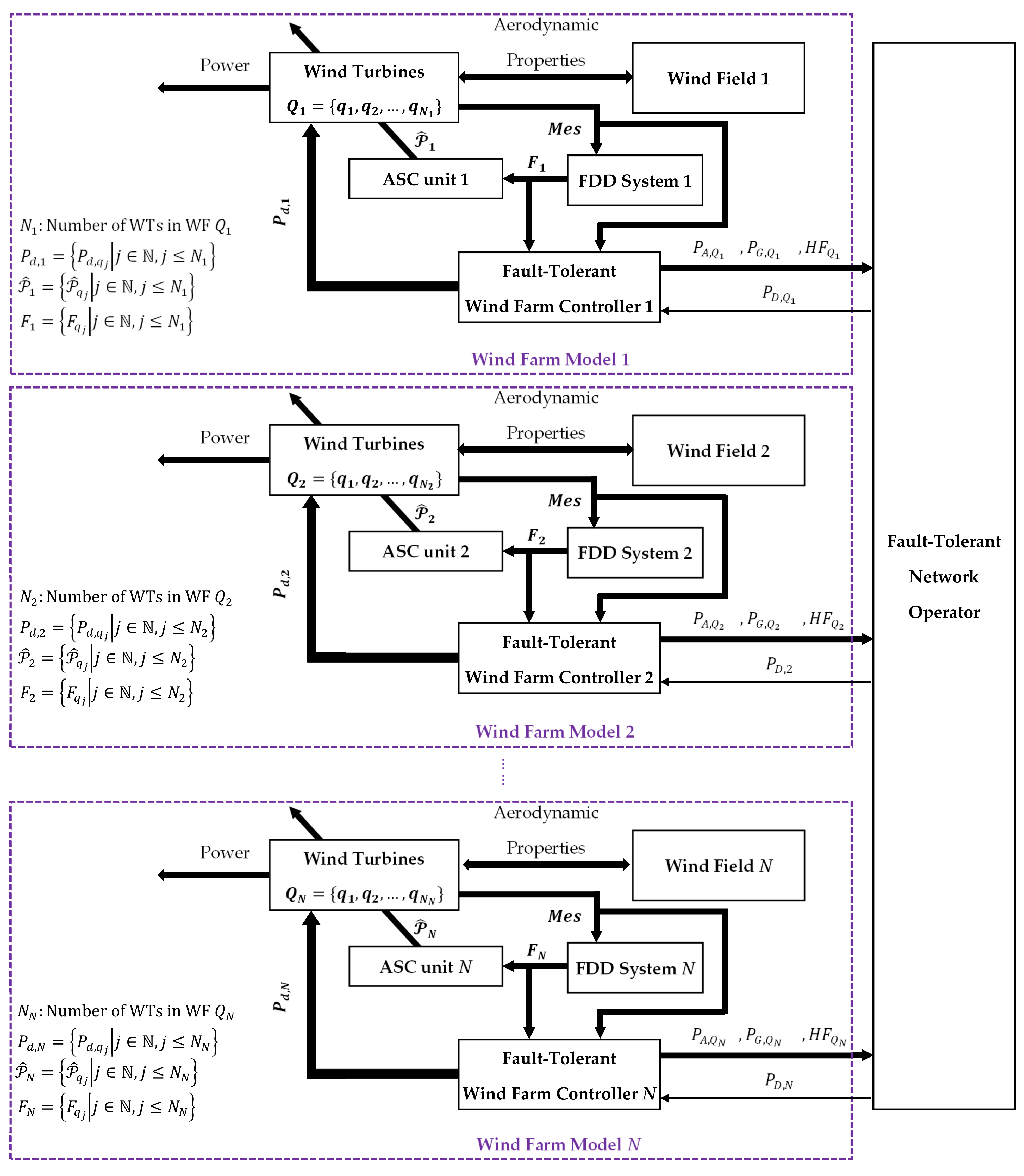
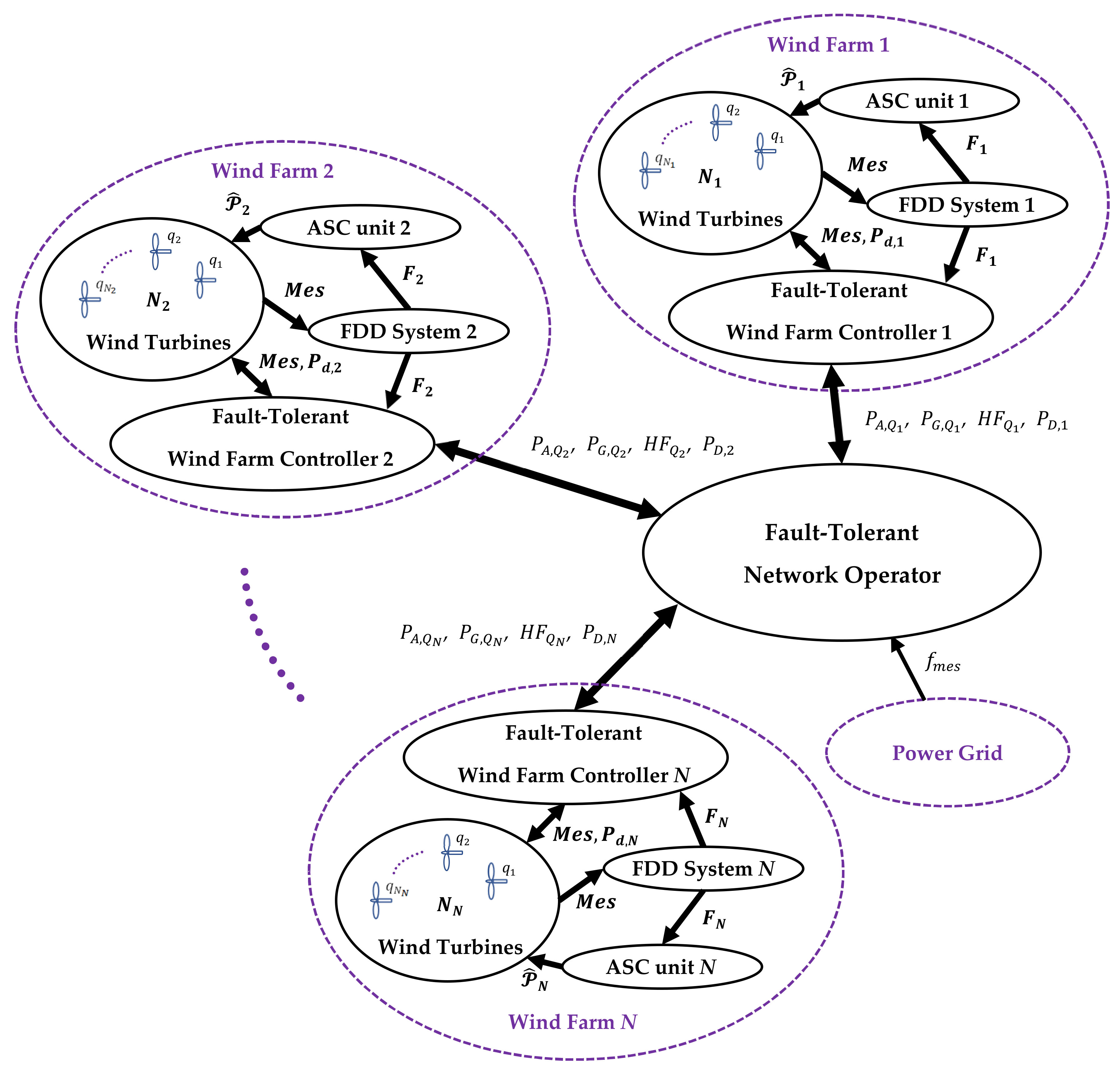
3. Active FTCC Design
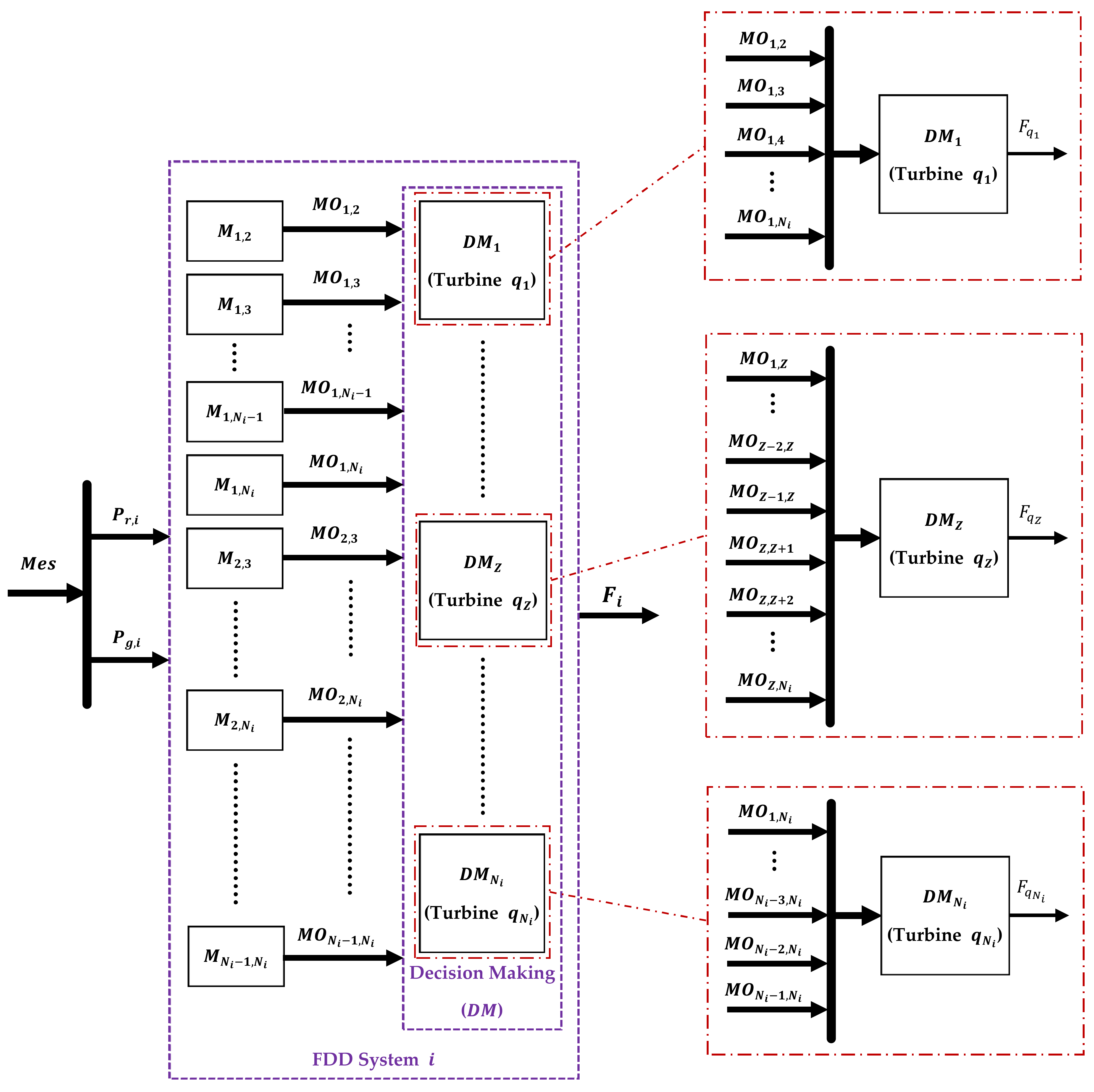
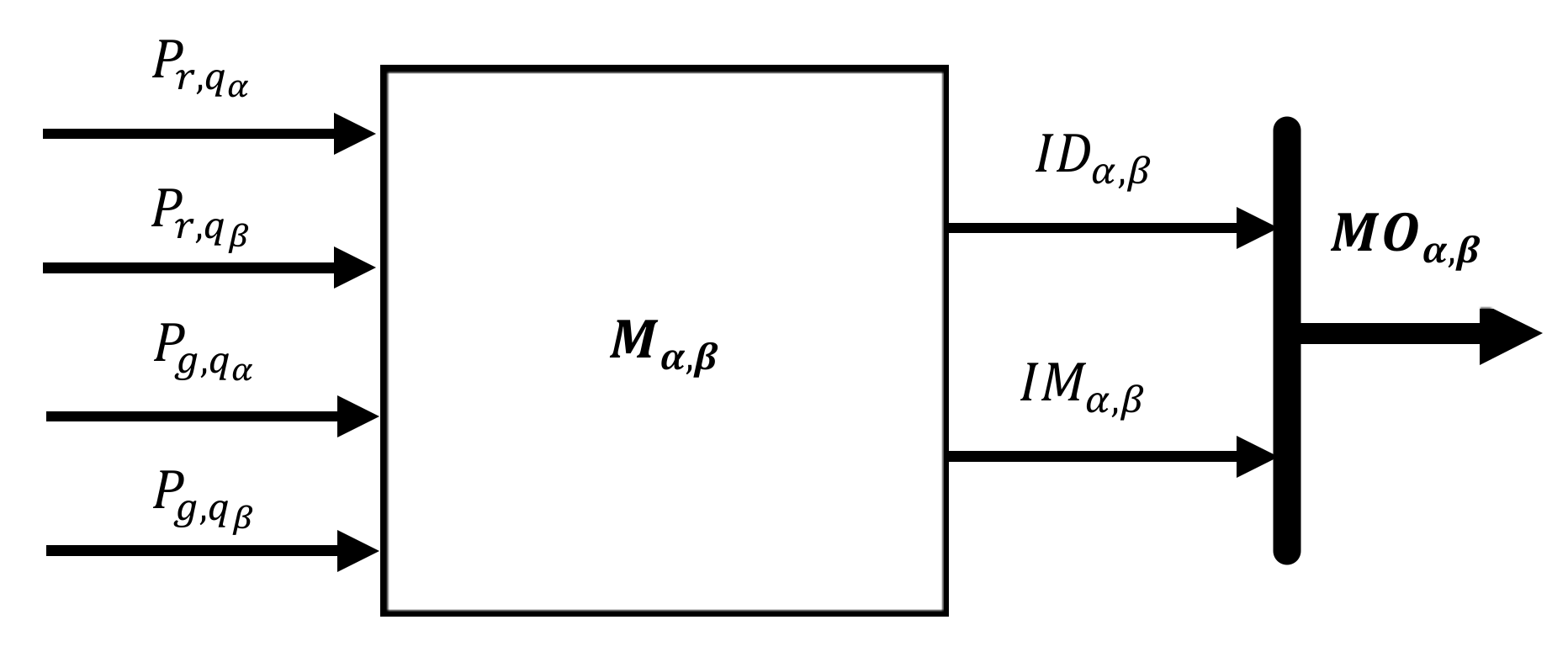
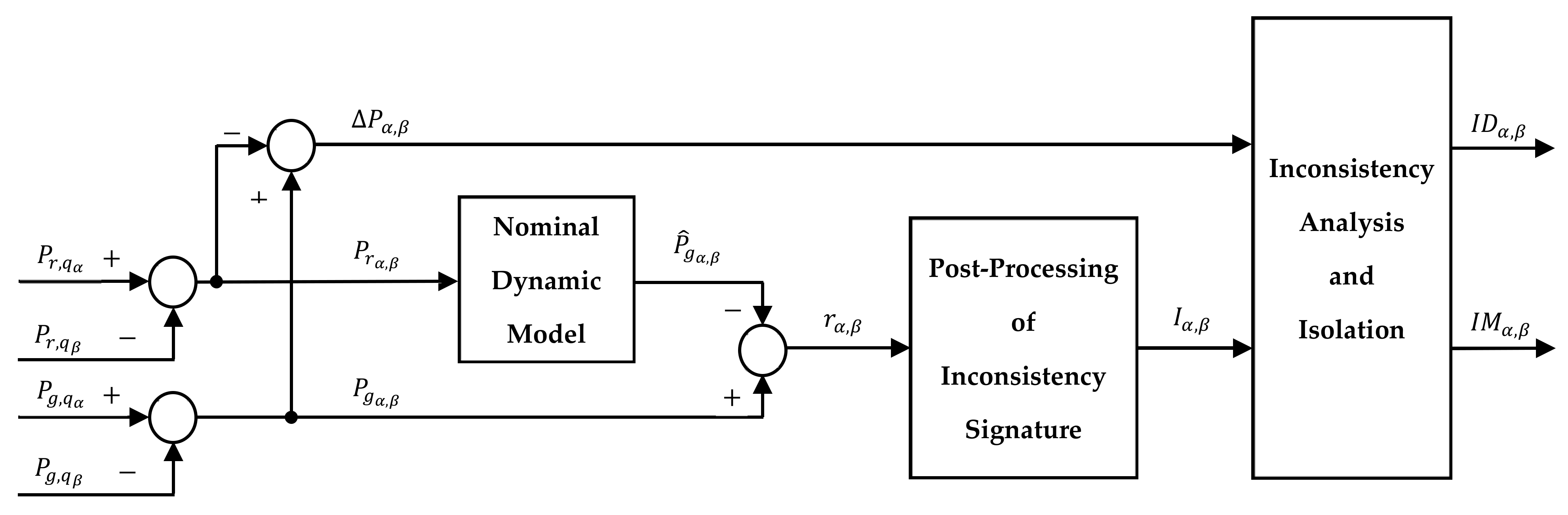
3.1. Distributed FDD Systems
3.2. Integrated ASC Unit
3.3. Fault-Tolerant Wind Farm Controller
| Algorithm 1. Wind Farm Control Reallocation (Active FTCC at Secondary Control Level). | |
| Inputs: : natural numbers set : number of wind farms in a wind farm cluster, : number of wind turbines in wind farm , : time-step, : total demanded power from wind farm for the next time-step, : generated (output) power of wind turbine , : measured nacelle wind speed of wind turbine , and : fault information including the number of wind turbine and its power loss magnitude . Outputs: : set of wind turbines in wind farm , : demanded power from wind turbine for the next time-step, : total available power in wind farm ,: total generated power in wind farm , and : total health factor of wind farm . Constants and Variables: : rated power of wind turbine , : air density, : rotor radius, : maximum power coefficient,: threshold for severe fault detection in wind farm , : threshold for severe fault detection in wind turbine ,: demanded power for turbine , : available power in turbine , : missed power of turbine , : extra available power in turbine , : total missed power of wind farm , and : total extra available power of farm , and : health factor for turbine . | |
| 1. for each do 1.1. if then 1.1.1. 1.2. else if then 1.2.1. 1.3. end if 1.4. 1.5. 1.6. 2. end for 3. 4. 5. 6. 7. for each do 7.1. 8. end for 9. for each do 9.1. 10. end for 11. if then 11.1. 12. else if then 12.1. 13. end if 14. return , , , and | |
3.4. Fault-Tolerant Network Operator
| Algorithm 2. Network Operator Control Reallocation (Active FTCC at Tertiary Control Level). | |
| Inputs: : natural numbers set, : number of farms in a wind farm cluster, : time-step, : total available power in wind farm , : generated (output) power of wind farm , : health factor for wind farm , and : measured grid frequency. Outputs: : set of wind farms in wind farm cluster, : demanded power from wind farm for the next time-step. Constants and Variables: : reference grid frequency, : minimum limit for total power generated by the wind farm cluster,: maximum limit for total power generated by wind farm cluster,: control band used for active power control,: dead band used for active power control (), : grid frequency error, : total demanded power from wind farm cluster for the next time-step, : total available power in wind farm cluster,: total demanded power from wind farm , : total missed power of wind farm , : total extra available power of wind farm ,: total missed power in wind farm cluster, and : total extra available power in wind farm cluster. | |
| 1. 2. if then 2.1. 3. else if then 3.1. 4. else if then 4.1. 5. else if then 5.1. 6. else if then 6.1. 7. end if 8. if then 8.1. 8.2. for each do 8.2.1. 8.3. end for 9. else if then 9.1. for each do 9.1.1. 9.1.2. 9.2. end for 9.3. 9.4. 9.5. 9.6. for each do 9.6.1. 9.7. end for 9.8. for each do 9.8.1. 9.9. end for 10. end if 11. return | |
4. Simulation Results
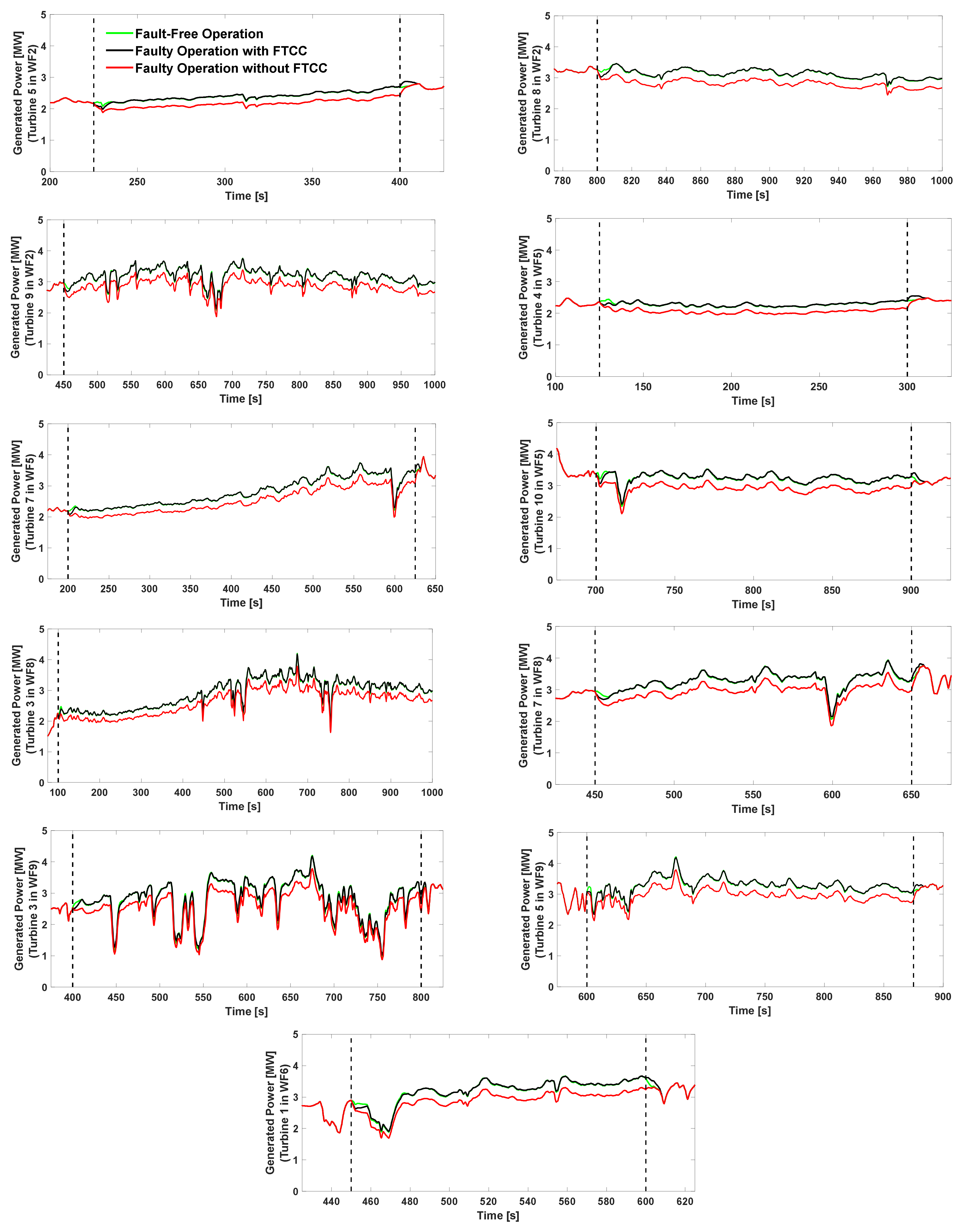
4.1. Mild Power Loss Fault Accommodation at the Turbine Level
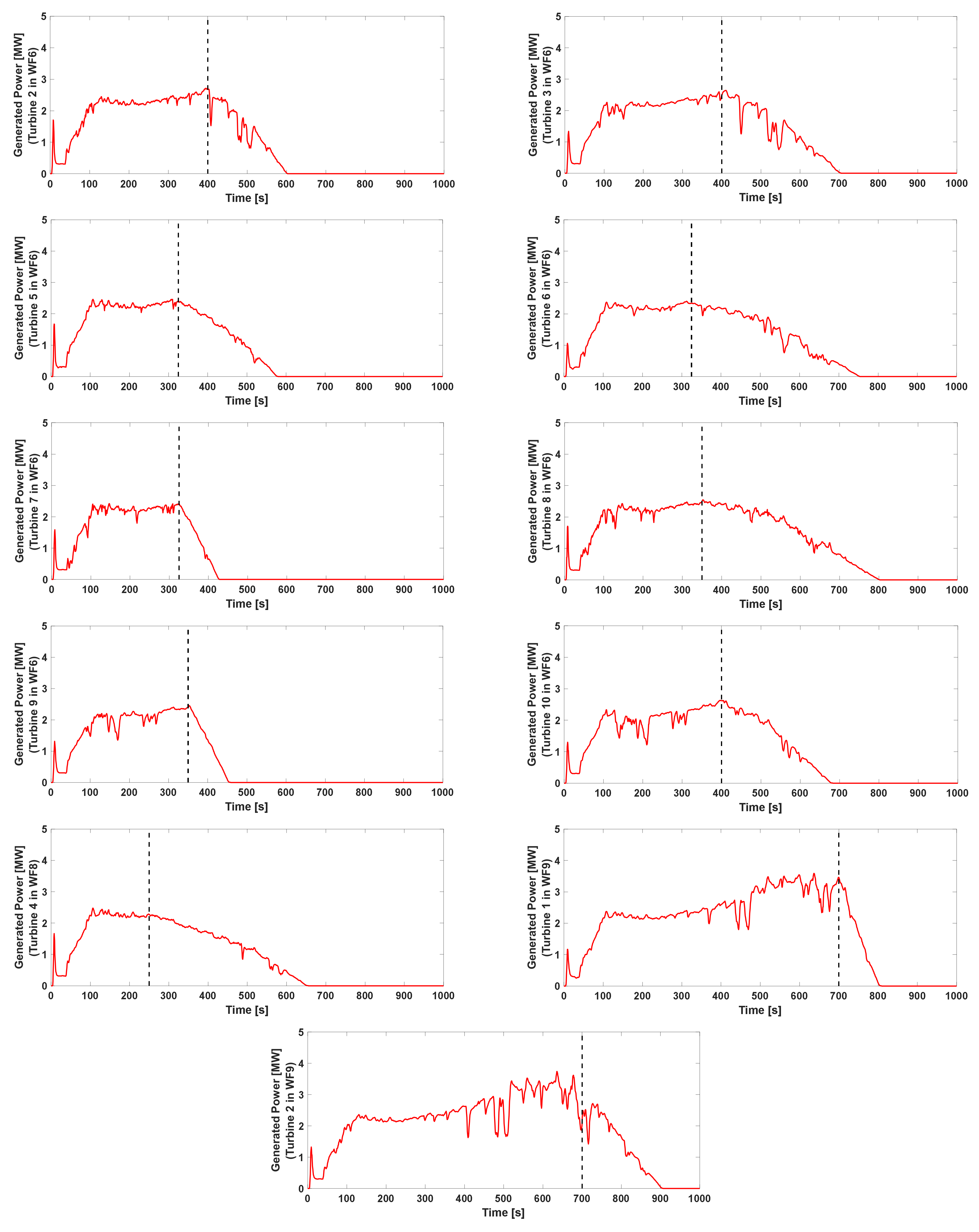
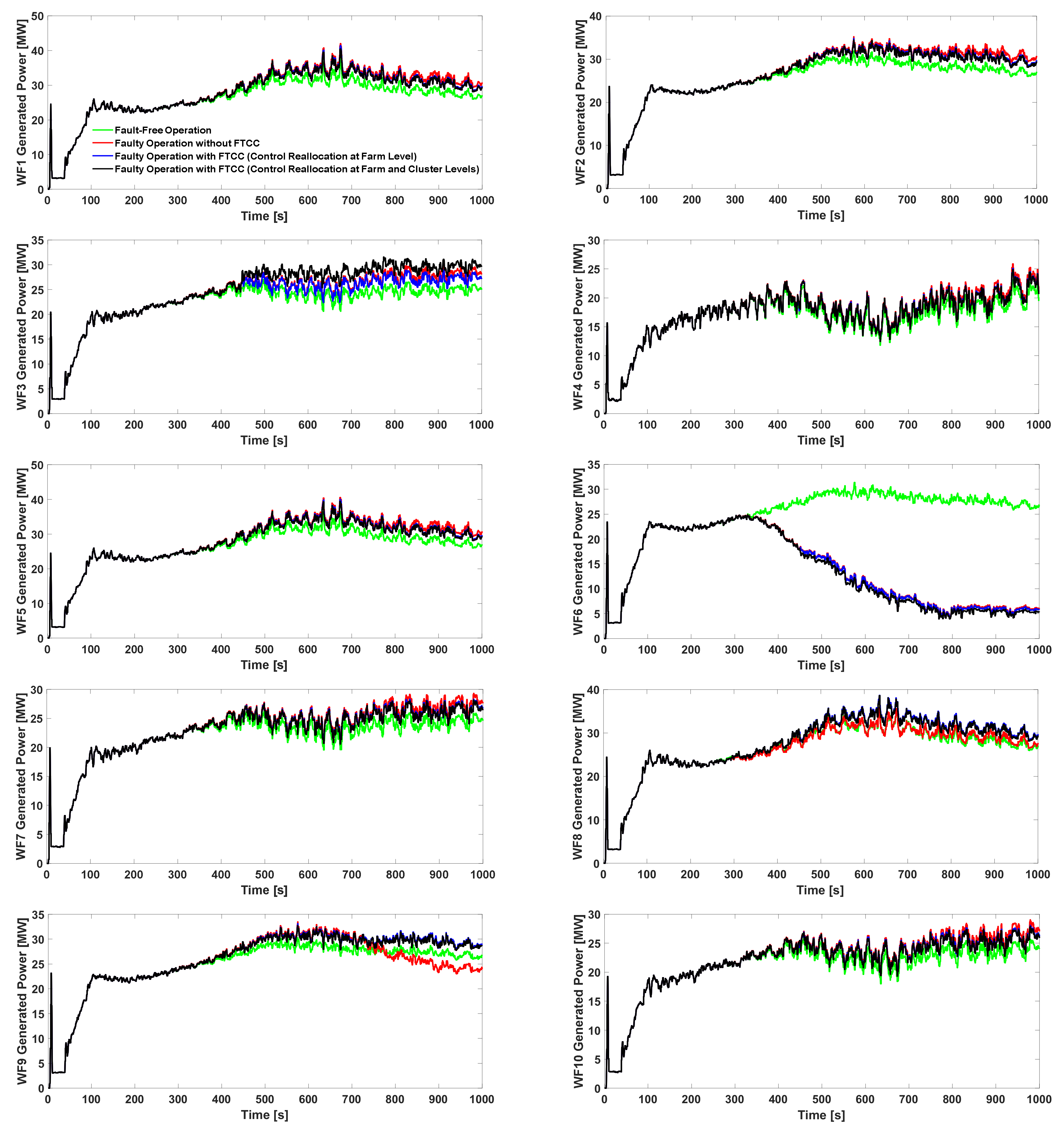
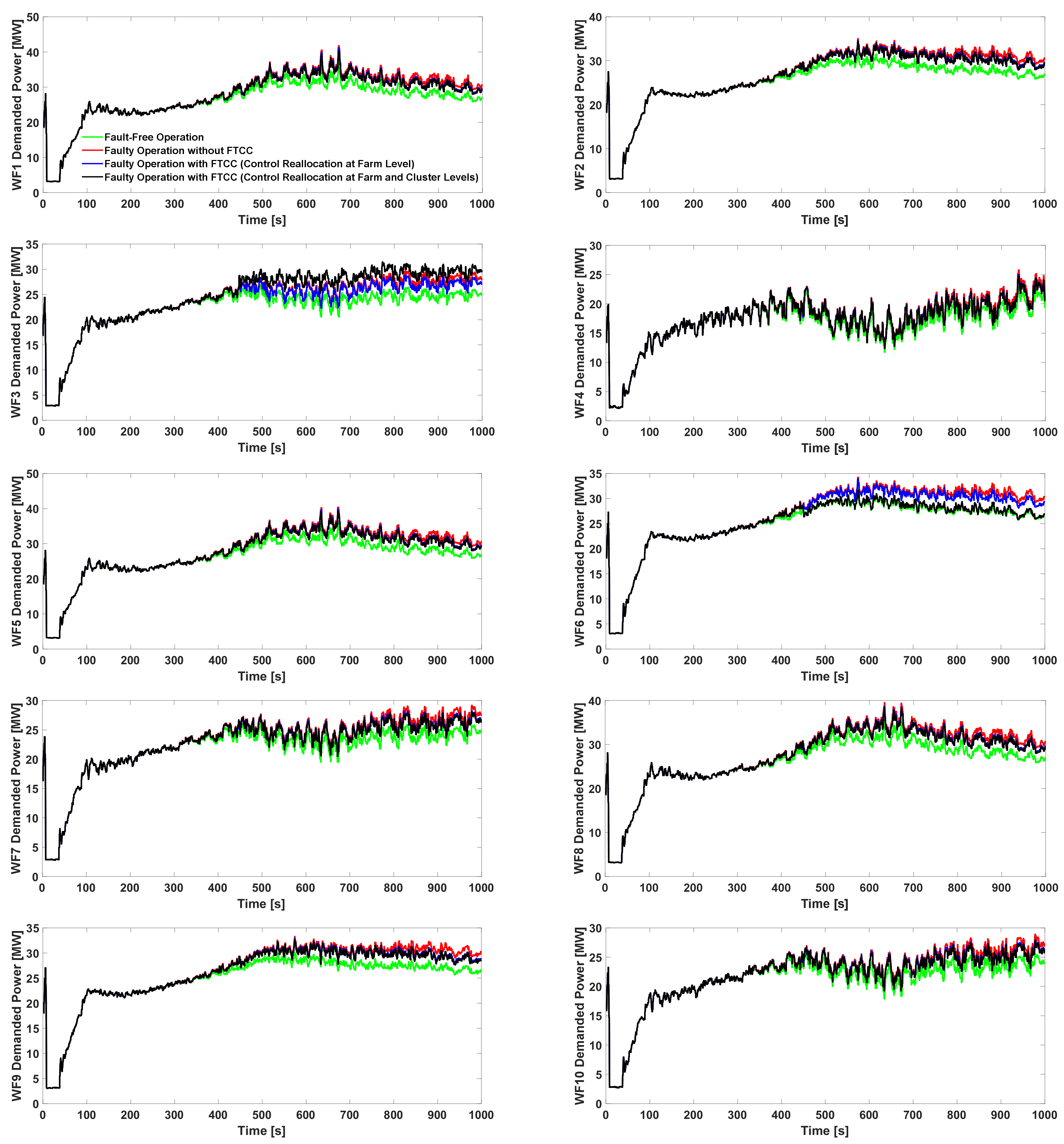
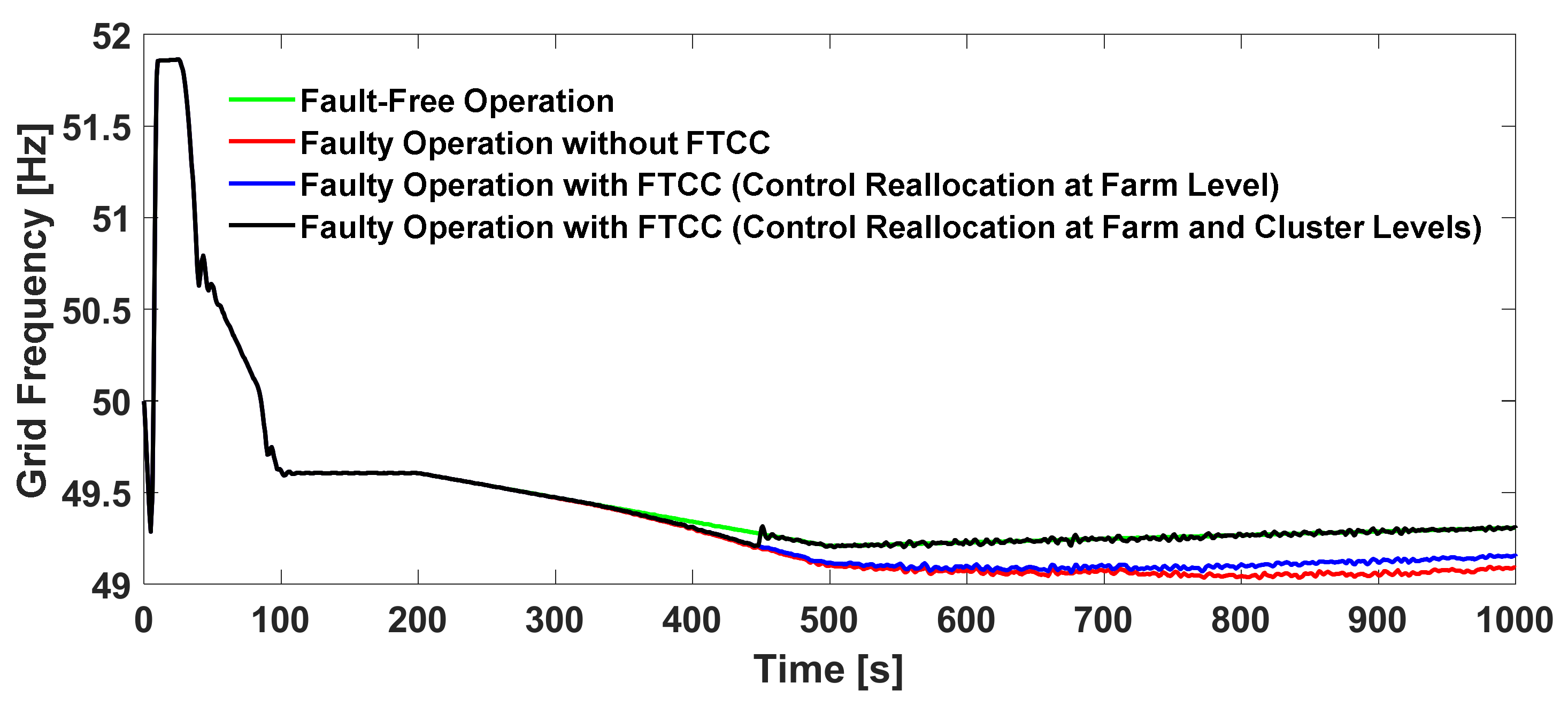
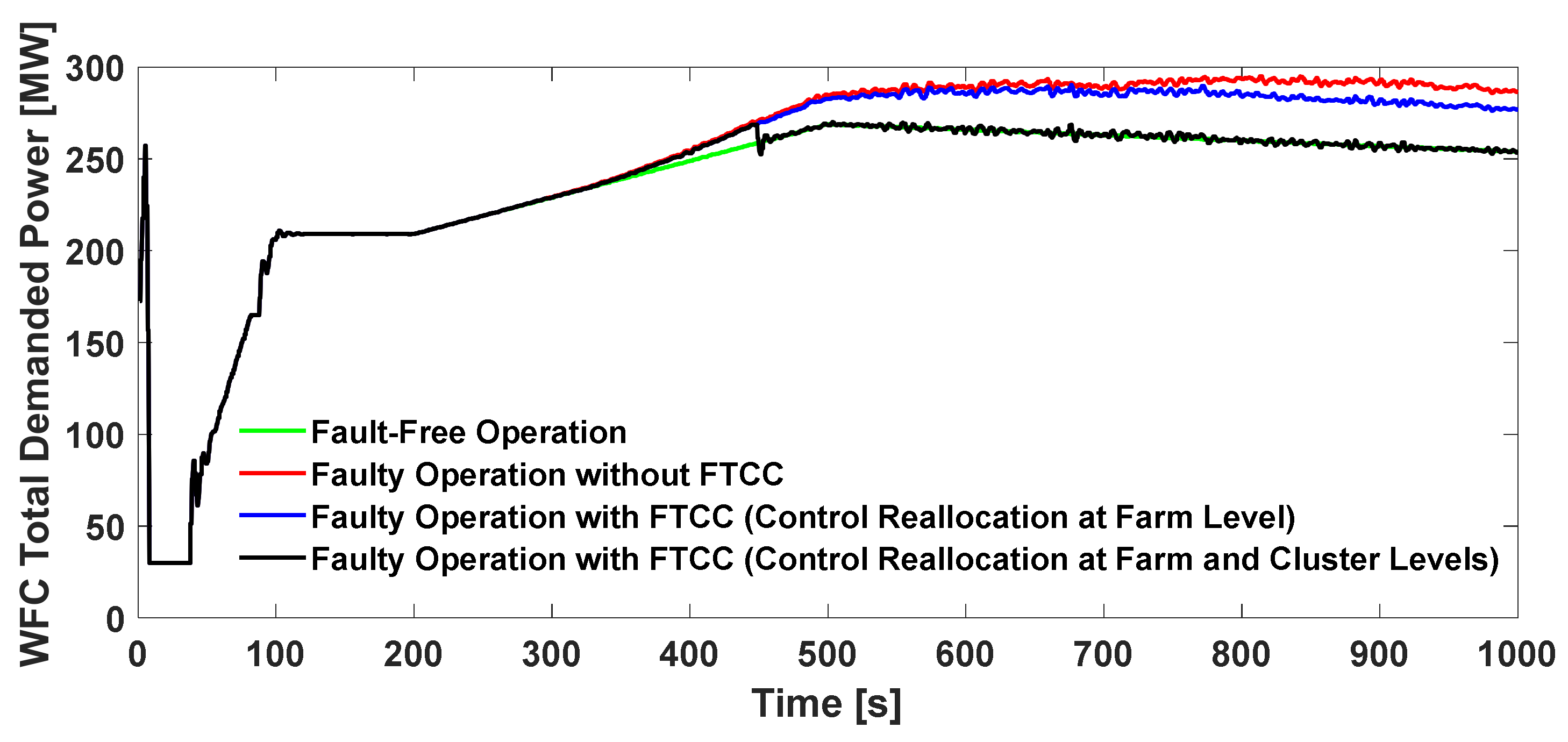
4.2. Severe Power Loss Fault Accommodation at Farm and Cluster Levels
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sloth, C.; Esbensen, T.; Stoustrup, J. Robust and Fault-Tolerant Linear Parameter-Varying Control of Wind Turbines. Mechatronics 2011, 21, 645–659. [Google Scholar] [CrossRef] [Green Version]
- Tabatabaeipour, S.M.; Odgaard, P.F.; Bak, T.; Stoustrup, J. Fault Detection of Wind Turbines with Uncertain Parameters: A Set-Membership Approach. Energies 2012, 5, 2424–2448. [Google Scholar] [CrossRef] [Green Version]
- Simani, S.; Castaldi, P. Active Actuator Fault-Tolerant Control of a Wind Turbine Benchmark Model. Int. J. Robust Nonlinear Control 2014, 24, 1283–1303. [Google Scholar] [CrossRef] [Green Version]
- Badihi, H.; Zhang, Y.M.; Hong, H. Fuzzy Gain-Scheduled Active Fault-Tolerant Control of a Wind Turbine. J. Frankl. Inst. 2014, 351, 3677–3706. [Google Scholar] [CrossRef]
- Fekih, A.; Mobayen, S.; Chen, C.C. Adaptive Robust Fault-Tolerant Control Design for Wind Turbines Subject to Pitch Actuator Faults. Energies 2021, 14, 1791. [Google Scholar] [CrossRef]
- Mazare, M.; Taghizadeh, M.; Ghaf-Ghanbari, P. Fault Tolerant Control of Wind Turbines with Simultaneous Actuator and Sensor Faults using Adaptive Time Delay Control. Renew. Energy 2021, 174, 86–101. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.M.; Hong, H. Wind Turbine Fault Diagnosis and Fault-Tolerant Torque Load Control against Actuator Faults. IEEE Trans. Control Syst. Technol. 2015, 23, 1351–1372. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, X. An Overview on Fault Diagnosis, Prognosis and Resilient Control for Wind Turbine Systems. Processes 2021, 9, 300. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.M.; Pillay, P.; Rakheja, S. Fault-Tolerant Individual Pitch Control for Load Mitigation in Wind Turbines with Actuator Faults. IEEE Trans. Ind. Electron. 2021, 68, 532–543. [Google Scholar] [CrossRef]
- Kusiak, A.; Verma, A. A Data-Driven Approach for Monitoring Blade Pitch Faults in Wind Turbines. IEEE Trans. Sustain. Energy 2011, 2, 87–96. [Google Scholar] [CrossRef]
- Kusiak, A.; Verma, A. A Data-Mining Approach to Monitoring Wind Turbines. IEEE Trans. Sustain. Energy 2012, 3, 150–157. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, X.; Qian, P. Wind Turbine Fault Detection and Identification through PCA-Based Optimal Variable Selection. IEEE Trans. Sustain. Energy 2018, 9, 1627–1635. [Google Scholar] [CrossRef] [Green Version]
- Marvuglia, A.; Messineo, A. Monitoring of Wind Farms’ Power Curves using Machine Learning Techniques. Appl. Energy 2012, 98, 574–583. [Google Scholar] [CrossRef]
- Karamichailidou, D.; Kaloutsa, V.; Alexandridis, A. Wind Turbine Power Curve Modeling Using Radial Basis Function Neural Networks and Tabu Search. Renew. Energy 2021, 163, 2137–2152. [Google Scholar] [CrossRef]
- Blesa, J.; Jiménez, P.; Rotondo, D.; Nejjari, F.; Puig, V. An Interval NLPV Parity Equations Approach for Fault Detection and Isolation of a Wind Farm. IEEE Trans. Ind. Electron. 2015, 62, 3794–3805. [Google Scholar] [CrossRef] [Green Version]
- Badihi, H.; Zhang, Y.M.; Hong, H. Active Fault Tolerant Control in a Wind Farm with Decreased Power Generation due to Blade Erosion/Debris Build-Up. IFAC-Pap. 2015, 48, 1369–1374. [Google Scholar] [CrossRef]
- Li, D.; Li, P.; Cai, W.; Song, Y.; Chen, H. Adaptive Fault-Tolerant Control of Wind Turbines with Guaranteed Transient Performance Considering Active Power Control of Wind Farms. IEEE Trans. Ind. Electron. 2018, 65, 3275–3285. [Google Scholar] [CrossRef]
- Ma, K.; Zhu, J.; Soltani, M.; Hajizadeh, A.; Chen, Z. Optimal Power Dispatch of an Offshore Wind Farm under Generator Fault. Appl. Sci. 2019, 9, 1184. [Google Scholar] [CrossRef] [Green Version]
- Ma, K.; Soltani, M.; Hajizadeh, A.; Zhu, J.; Chen, Z. Wind Farm Power Optimization and Fault Ride-Through under Inter-Turn Short-Circuit Fault. Energies 2021, 14, 3072. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.M.; Hong, H. Fault-Tolerant Cooperative Control in an Offshore Wind Farm using Model-Free and Model-Based Fault Detection and Diagnosis Approaches. Appl. Energy 2017, 201, 284–307. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.M.; Pillay, P.; Rakheja, S. Application of FMRAC to Fault-Tolerant Cooperative Control of a Wind Farm with Decreased Power Generation due to Blade Erosion/Debris Build-Up. Int. J. Adapt. Control. Signal Process. 2018, 32, 628–645. [Google Scholar] [CrossRef]
- Badihi, H.; Jadidi, S.; Zhang, Y.M.; Pillay, P.; Rakheja, S. Fault-Tolerant Cooperative Control in a Wind Farm using Adaptive Control Reconfiguration and Control Reallocation. IEEE Trans. Sustain. Energy 2019, 11, 2119–2129. [Google Scholar] [CrossRef]
- Soltani, M.; Knudsen, T.; Bak, T. Modeling and Simulation of Offshore Wind Farms for Farm Level Control. In Proceedings of the European Offshore Wind Conference and Exhibition (EOW), Stockholm, Sweden, 15 September 2009. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5 MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- Jadidi, S.; Badihi, H.; Zhang, Y.M. A Review on Operation, Control and Protection of Smart Microgrids. In Proceedings of the IEEE 2nd International Conference on Renewable Energy and Power Engineering (REPE), Toronto, ON, Canada, 2–4 November 2019; pp. 100–104. [Google Scholar] [CrossRef]
- Fingersh, L.; Carlin, P. Results from the NREL Variable-Speed Test Bed. In Proceedings of the 17th ASME Wind Energy Symposium, Reno, NV, USA, 12 January 1998; pp. 233–237. [Google Scholar] [CrossRef] [Green Version]
- Johnson, K.E.; Pao, L.Y.; Balas, M.J.; Fingersh, L.J. Control of Variable-Speed Wind Turbines: Standard and Adaptive Techniques for Maximizing Energy Capture. IEEE Control. Syst. Mag. 2006, 26, 71–81. [Google Scholar] [CrossRef]
- Jadidi, S.; Badihi, H.; Zhang, Y.M. Passive Fault-Tolerant Control Strategies for Power Converter in a Hybrid Microgrid. Energies 2020, 13, 5625. [Google Scholar] [CrossRef]
- Jadidi, S.; Badihi, H.; Zhang, Y.M. Passive Fault-Tolerant Control of PWM Converter in a Hybrid AC/DC Microgrid. In Proceedings of the IEEE 2nd International Conference on Renewable Energy and Power Engineering (REPE), Toronto, ON, Canada, 2–4 November 2019; pp. 90–94. [Google Scholar] [CrossRef]
- Zhang, Y.M.; Jiang, J. Bibliographical Review on Reconfigurable Fault-Tolerant Control Systems. Annu. Rev. Control. 2008, 32, 229–252. [Google Scholar] [CrossRef]
- Babuska, R. Fuzzy Modeling for Control; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Approaches | Objectives | References |
|---|---|---|
| Various data-mining-based algorithms | Prediction of wind turbine faults | [10,11] |
| Principal component analysis | Reducing the dataset for turbine FDD | [12] |
| Various machine learning methods | Modeling and estimation of a wind farm power curve | [13,14] |
| Interval nonlinear parameter-varying | Fault diagnosis of a wind farm | [15] |
| Fuzzy model-based FDD with signal correction | Active FTC for a wind farm against decreased power generation | [16] |
| Adaptive FTC using barrier Lyapunov function | Active power control during actuator fault | [17] |
| Particle swarm optimization | Accommodation of the generator fault effects at farm level | [18,19] |
| FTCC using fuzzy logic at farm level | Accommodation of mild power-loss faults caused by turbine blade erosion and debris build-up on the blades | [20,21] |
| FTCC using adaptive PI control at turbine level and control reallocation at farm level | Accommodation of mild and severe power loss faults caused by turbine blade erosion and debris build-up on the blades | [22] |
| and Power Consistency | Module Output | |
|---|---|---|
| Consistent | ||
| Inconsistent | ||
| Sensor | Unit | Noise Power | Starting Seed | |
|---|---|---|---|---|
| Nominal | Error | |||
| Anemometer—Wind speed at hub height | m/s | Stochastic values | ||
| Rotor speed | rad/s | |||
| Generator speed | rad/s | |||
| Blade pitch angle | deg | |||
| Communication Link | Delay | Starting Seed | |
|---|---|---|---|
| Nominal | Error | ||
| Between network operator and wind farm controllers in WFC | s | Stochastic values | |
| Between wind farm controller and turbines in each wind farm | s | ||
| Severe Faults (Farm and Cluster Levels) | Results | Active FTCC | |
|---|---|---|---|
| Switching Time 1 (s) | RMSPE 2 (%) | ||
| WF8 | Best Case | 312.9 | 0.267 |
| Average Case | 313.2 | 0.295 | |
| Worst Case | 313.4 | 0.310 | |
| WF9 | Best Case | 707.8 | 0.412 |
| Average Case | 708.1 | 0.435 | |
| Worst Case | 708.2 | 0.490 | |
| WFC | Best Case | 447 | 0.295 |
| Average Case | 448 | 0.321 | |
| Worst Case | 449 | 0.382 | |
| Mild Faults (Turbine Level) | Results | Active FTCC | |
|---|---|---|---|
| Detection Time 1 (s) | RMSPE (%) | ||
| T2,5 | Best Case | 1.58 | 0.204 |
| Average Case | 1.69 | 0.318 | |
| Worst Case | 1.91 | 0.402 | |
| T2,8 | Best Case | 1.51 | 0.198 |
| Average Case | 1.73 | 0.267 | |
| Worst Case | 2.05 | 0.396 | |
| T2,9 | Best Case | 1.89 | 0.211 |
| Average Case | 2.10 | 0.304 | |
| Worst Case | 2.61 | 0.435 | |
| T5,4 | Best Case | 1.91 | 0.283 |
| Average Case | 2.12 | 0.315 | |
| Worst Case | 2.54 | 0.333 | |
| T5,7 | Best Case | 2.05 | 0.326 |
| Average Case | 2.67 | 0.409 | |
| Worst Case | 3.23 | 0.455 | |
| T5,10 | Best Case | 2.61 | 0.275 |
| Average Case | 3.19 | 0.331 | |
| Worst Case | 3.66 | 0.395 | |
| T6,1 | Best Case | 1.95 | 0.230 |
| Average Case | 2.15 | 0.353 | |
| Worst Case | 2.42 | 0.406 | |
| T8,3 | Best Case | 1.52 | 0.215 |
| Average Case | 1.90 | 0.253 | |
| Worst Case | 2.44 | 0.301 | |
| T8,7 | Best Case | 2.85 | 0.320 |
| Average Case | 3.03 | 0.442 | |
| Worst Case | 3.54 | 0.525 | |
| T9,3 | Best Case | 2.41 | 0.353 |
| Average Case | 2.83 | 0.441 | |
| Worst Case | 3.09 | 0.510 | |
| T9,5 | Best Case | 1.28 | 0.203 |
| Average Case | 1.35 | 0.233 | |
| Worst Case | 1.51 | 0.281 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jadidi, S.; Badihi, H.; Zhang, Y. Fault-Tolerant Cooperative Control of Large-Scale Wind Farms and Wind Farm Clusters. Energies 2021, 14, 7436. https://doi.org/10.3390/en14217436
Jadidi S, Badihi H, Zhang Y. Fault-Tolerant Cooperative Control of Large-Scale Wind Farms and Wind Farm Clusters. Energies. 2021; 14(21):7436. https://doi.org/10.3390/en14217436
Chicago/Turabian StyleJadidi, Saeedreza, Hamed Badihi, and Youmin Zhang. 2021. "Fault-Tolerant Cooperative Control of Large-Scale Wind Farms and Wind Farm Clusters" Energies 14, no. 21: 7436. https://doi.org/10.3390/en14217436
APA StyleJadidi, S., Badihi, H., & Zhang, Y. (2021). Fault-Tolerant Cooperative Control of Large-Scale Wind Farms and Wind Farm Clusters. Energies, 14(21), 7436. https://doi.org/10.3390/en14217436