
A Study on a Floating Solar Energy System Applied in an Intertidal Zone


Abstract
:1. Introduction
1.1. The Concepts of Different FPV Types
1.2. Different Types of Mooring Systems
1.3. Environmental Condition in Intertidal Zone
2. Materials and Methods
2.1. Numerical Simulation
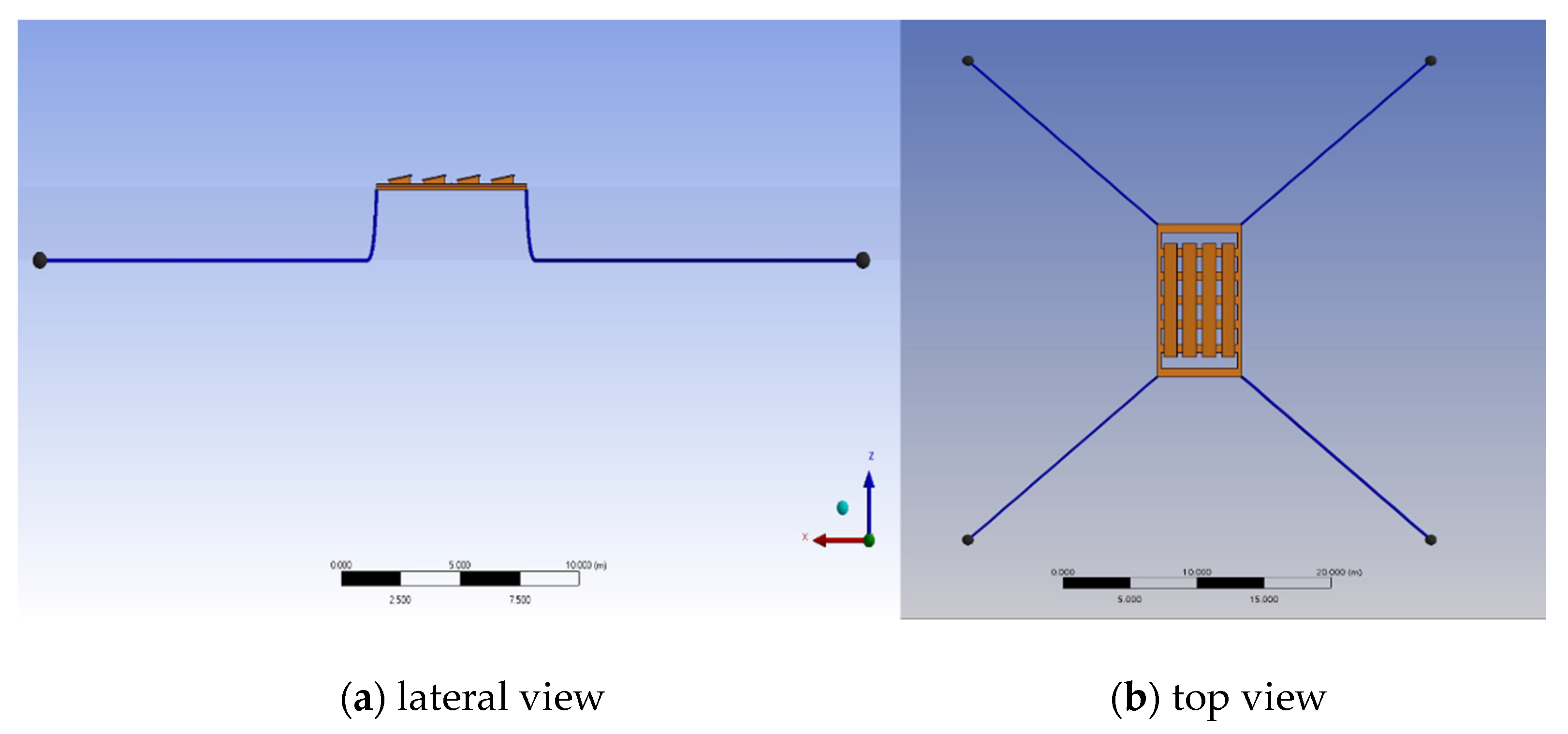
2.1.1. Numerical Setup
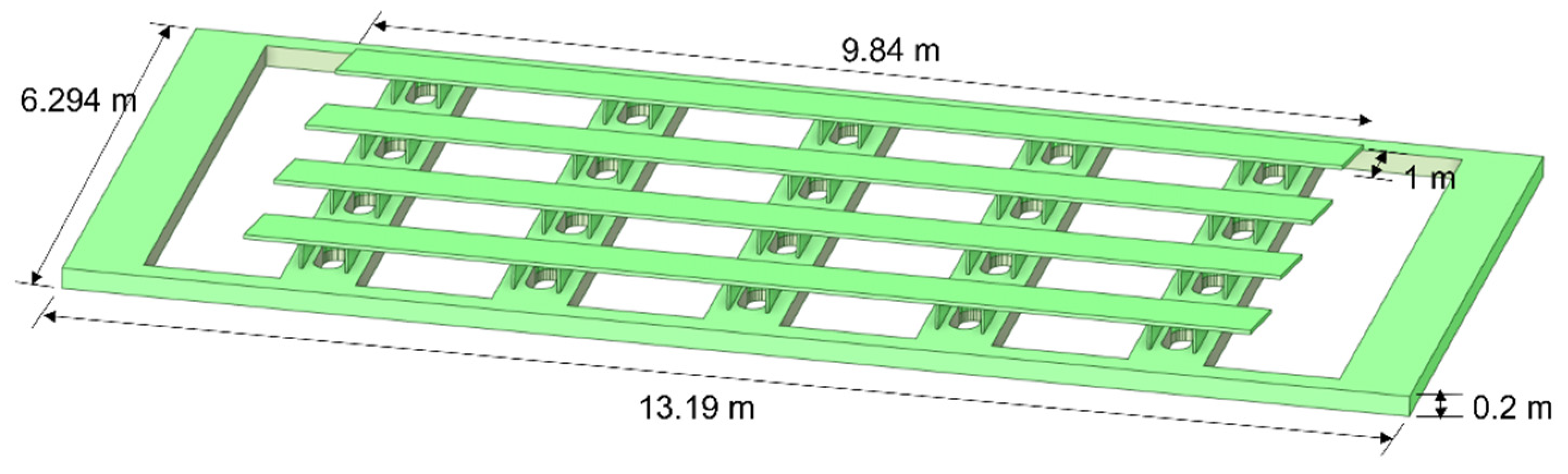
2.1.2. Model of the FPV System
2.2. Experimental Setup
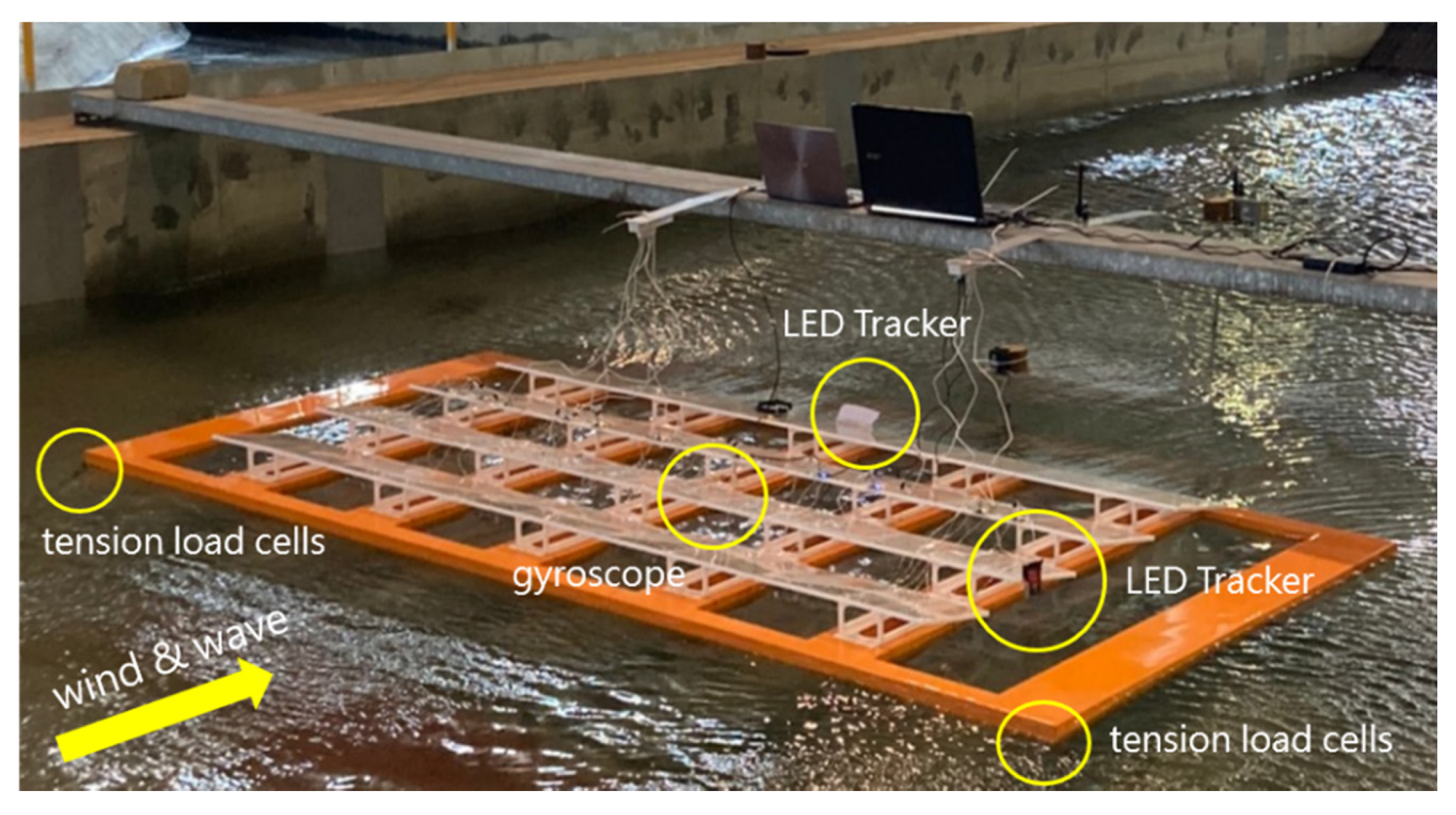
2.2.1. Experiment Model
2.2.2. Wave/Wind/Current Basin and Instrumentation
2.2.3. Irregular Wave Test
3. Results and Discussion
3.1. Free Decay Test
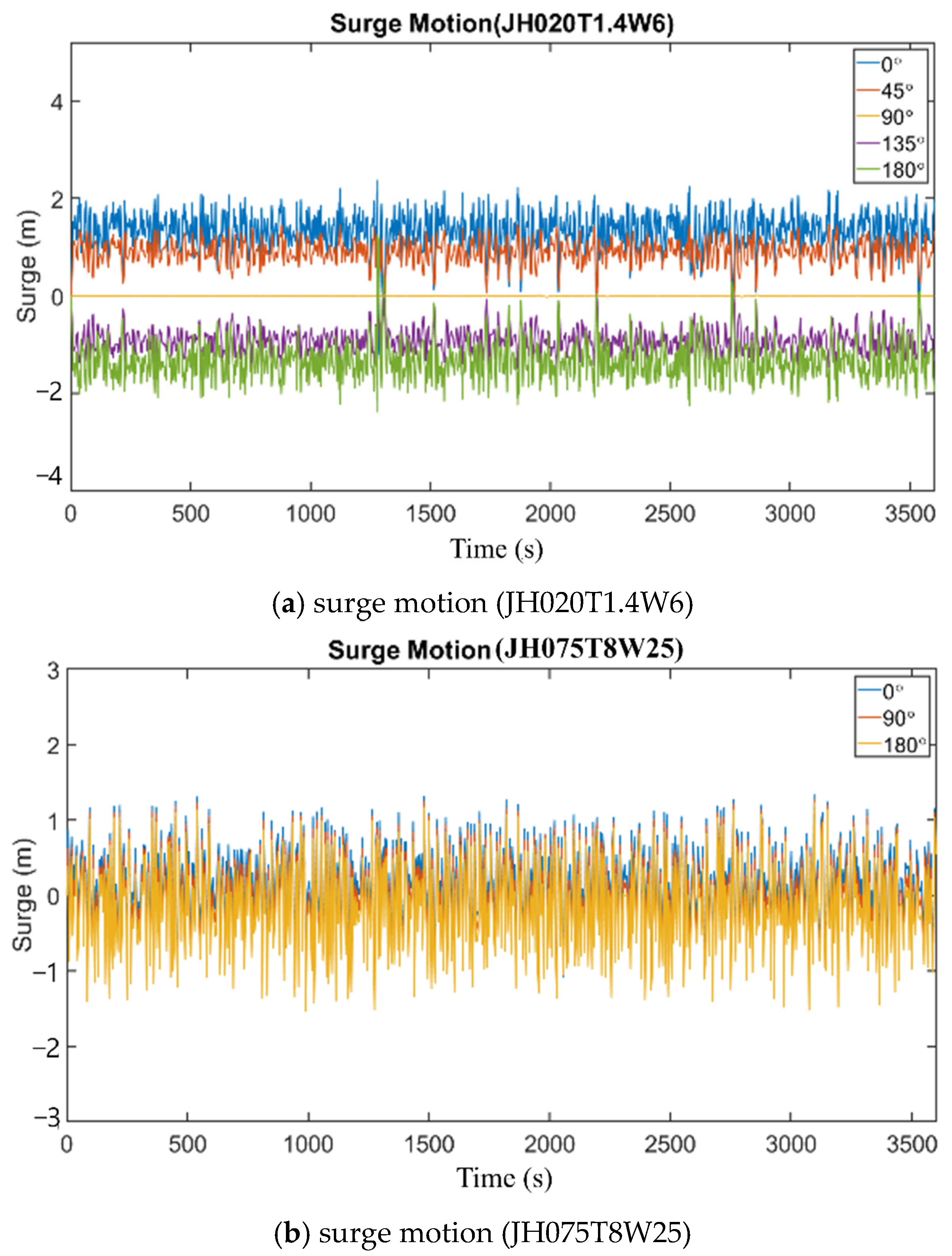
3.2. Irregular Wave Analysis from AQWA
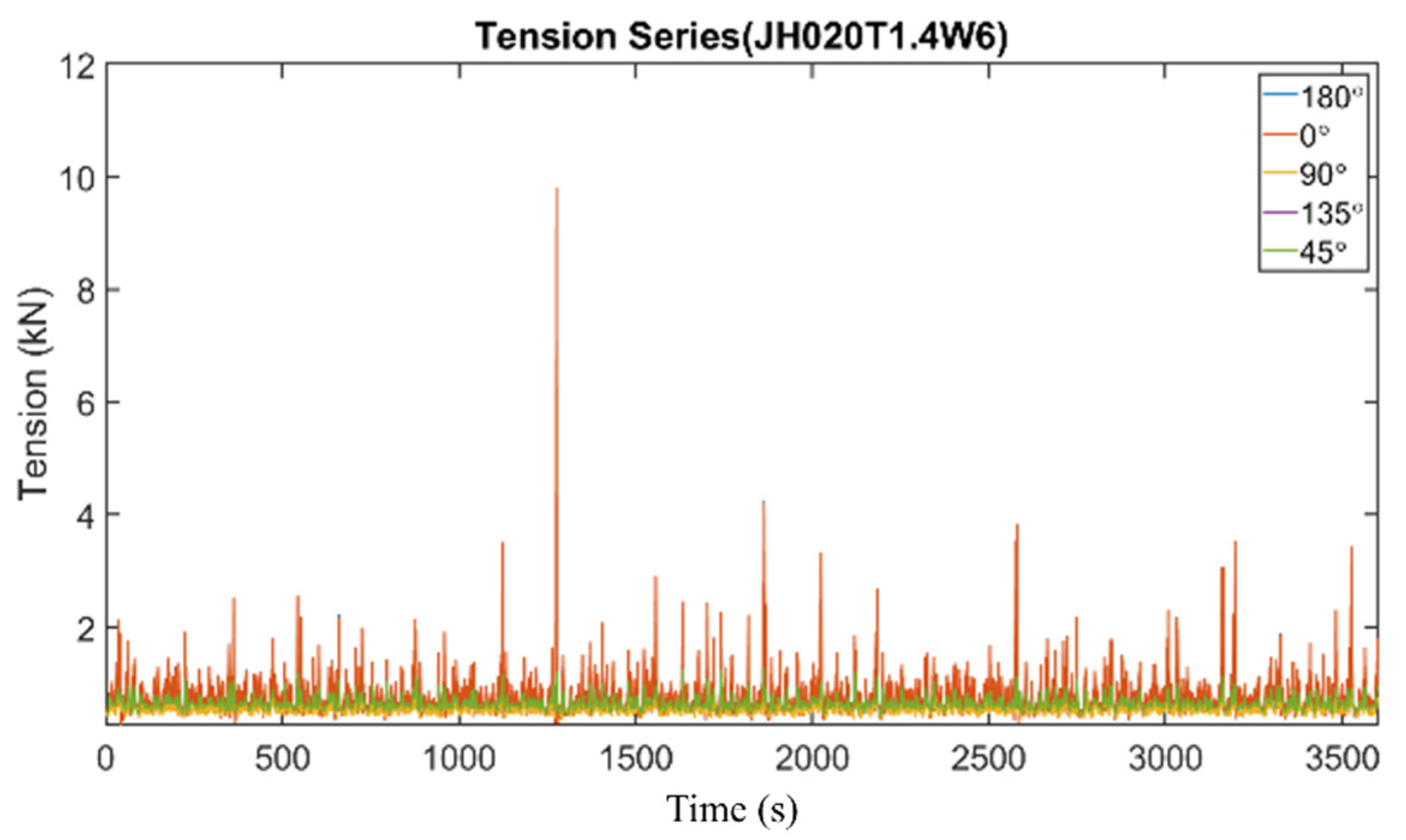
3.3. Tension Analysis from AQWA
3.4. Pressure Coefficient from FLUENT
3.5. Lift Coefficient from Fluent
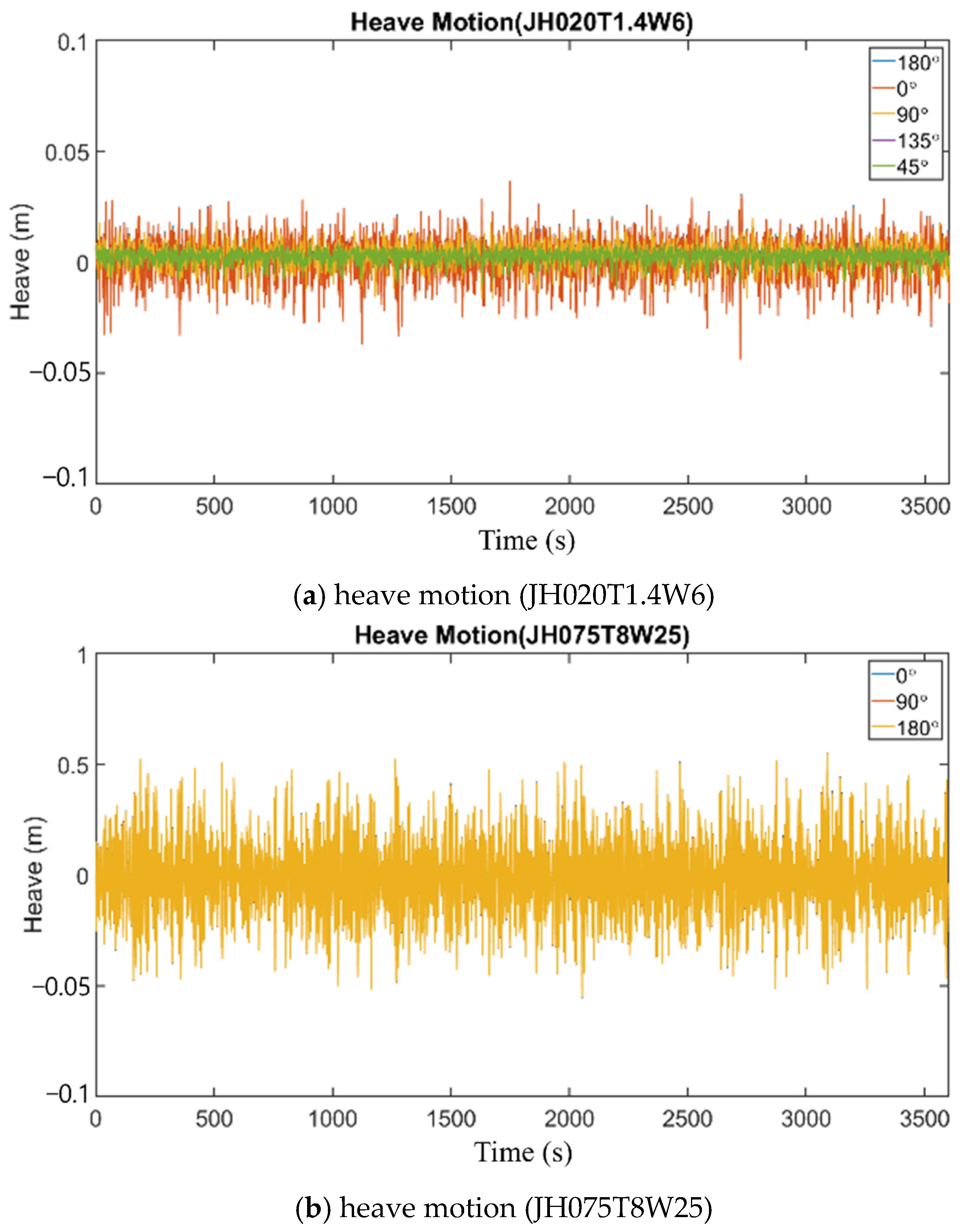
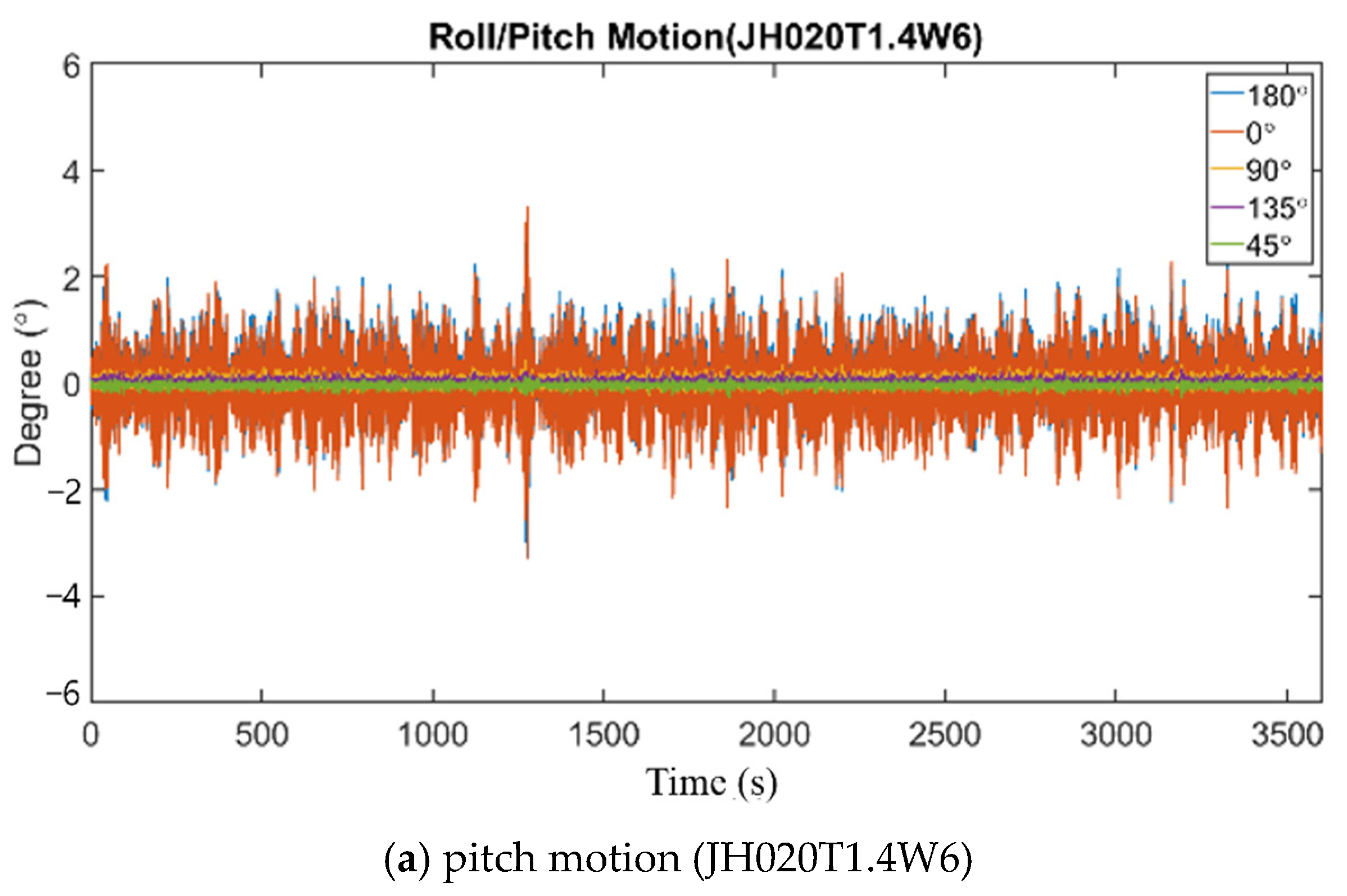
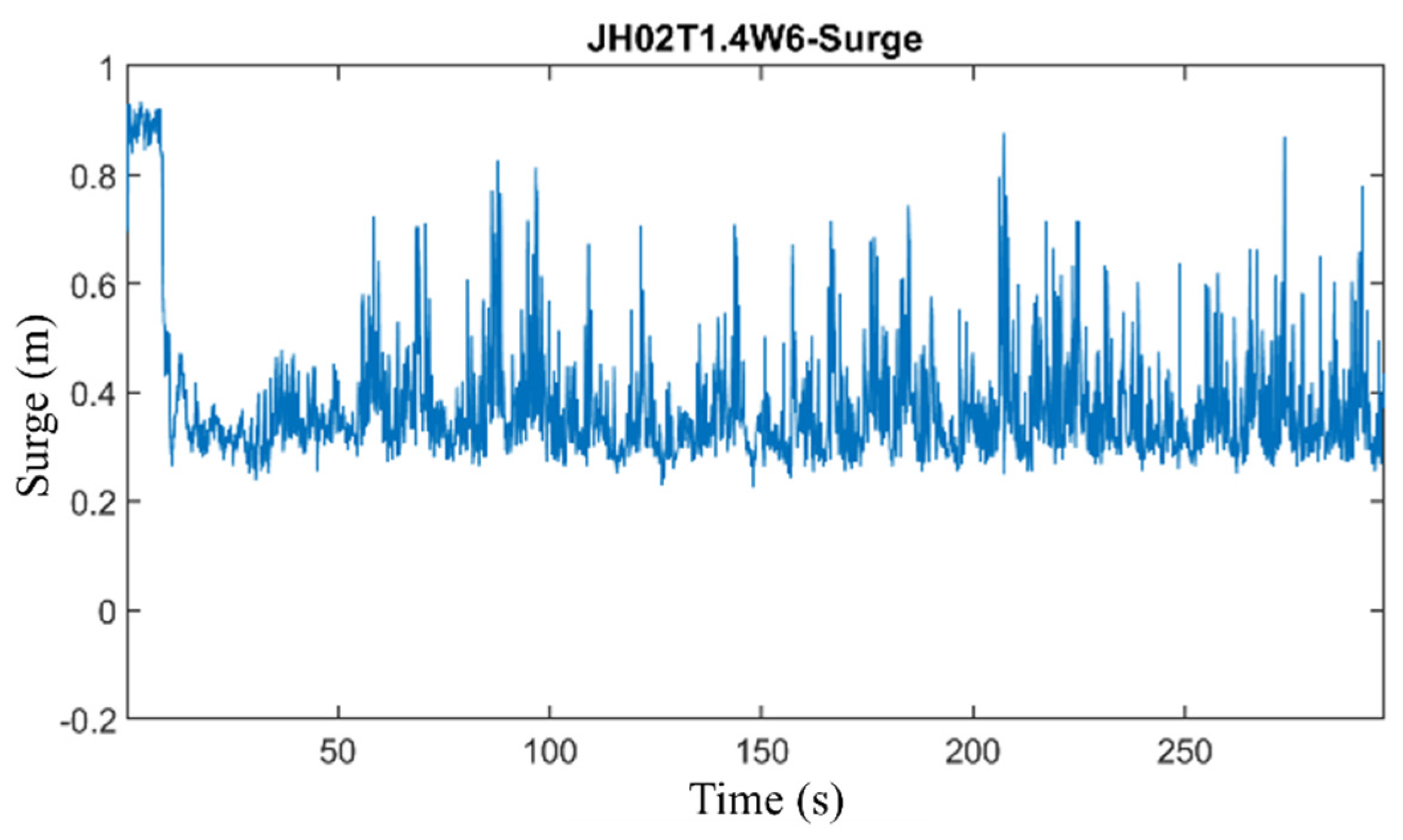
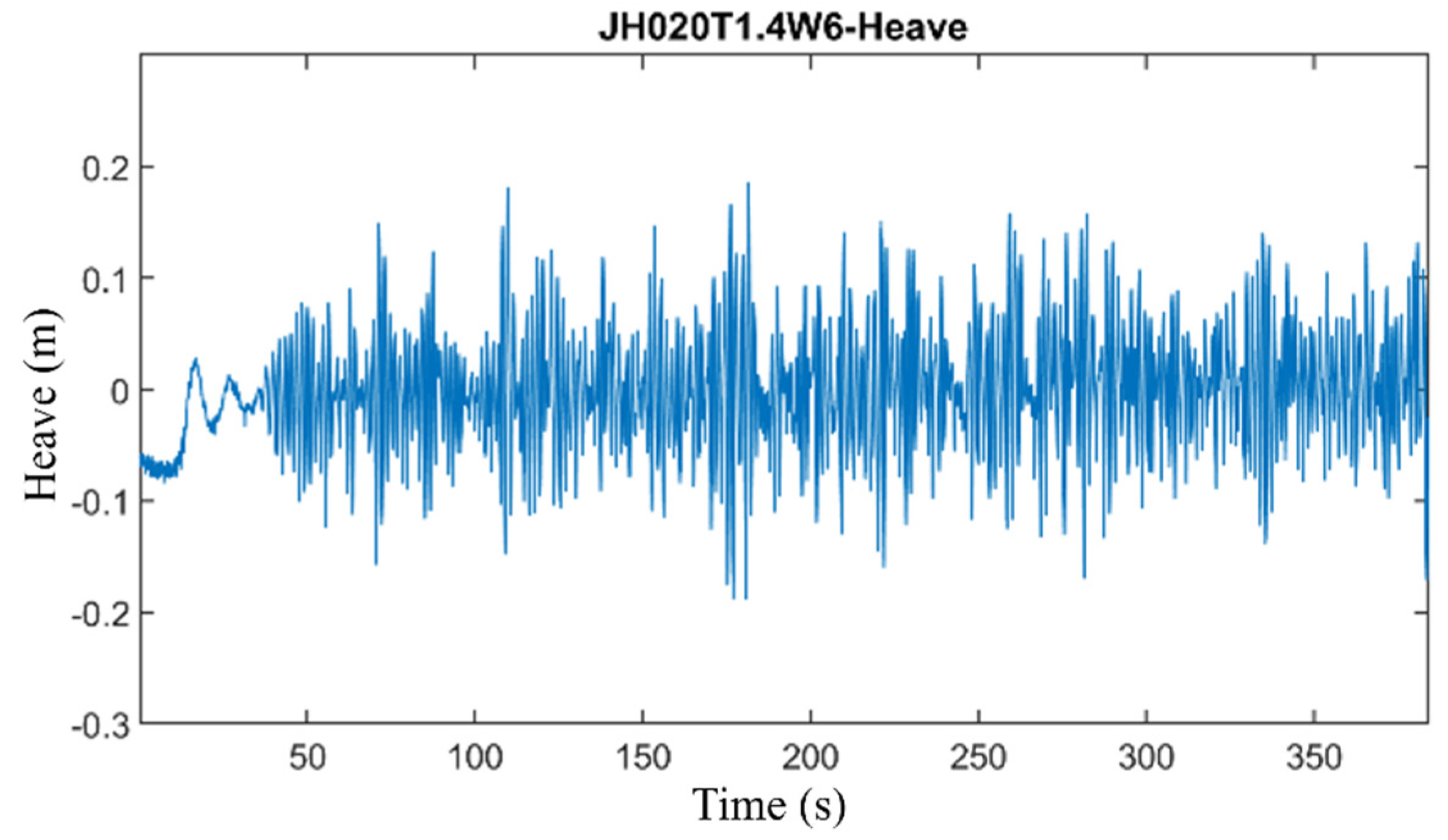
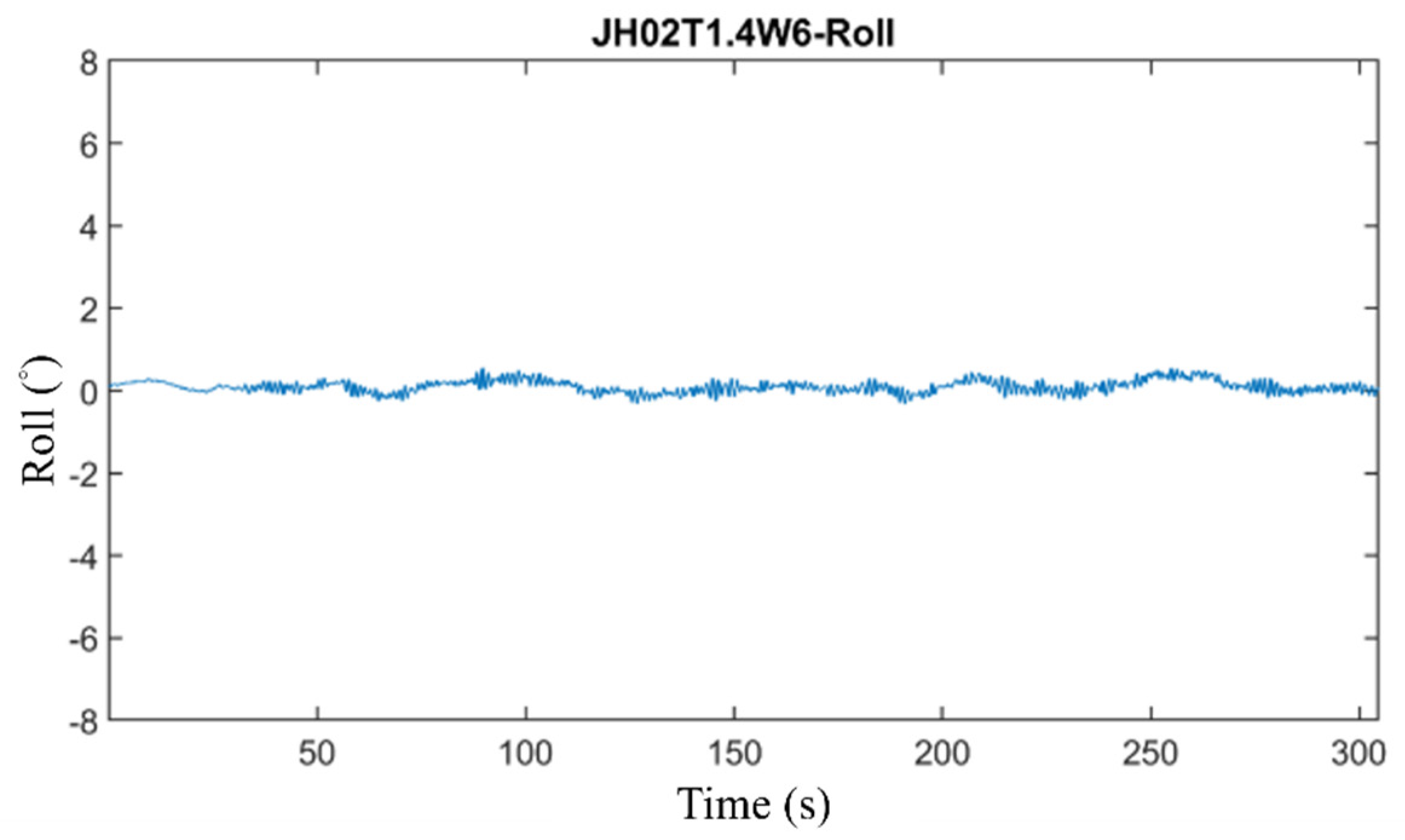
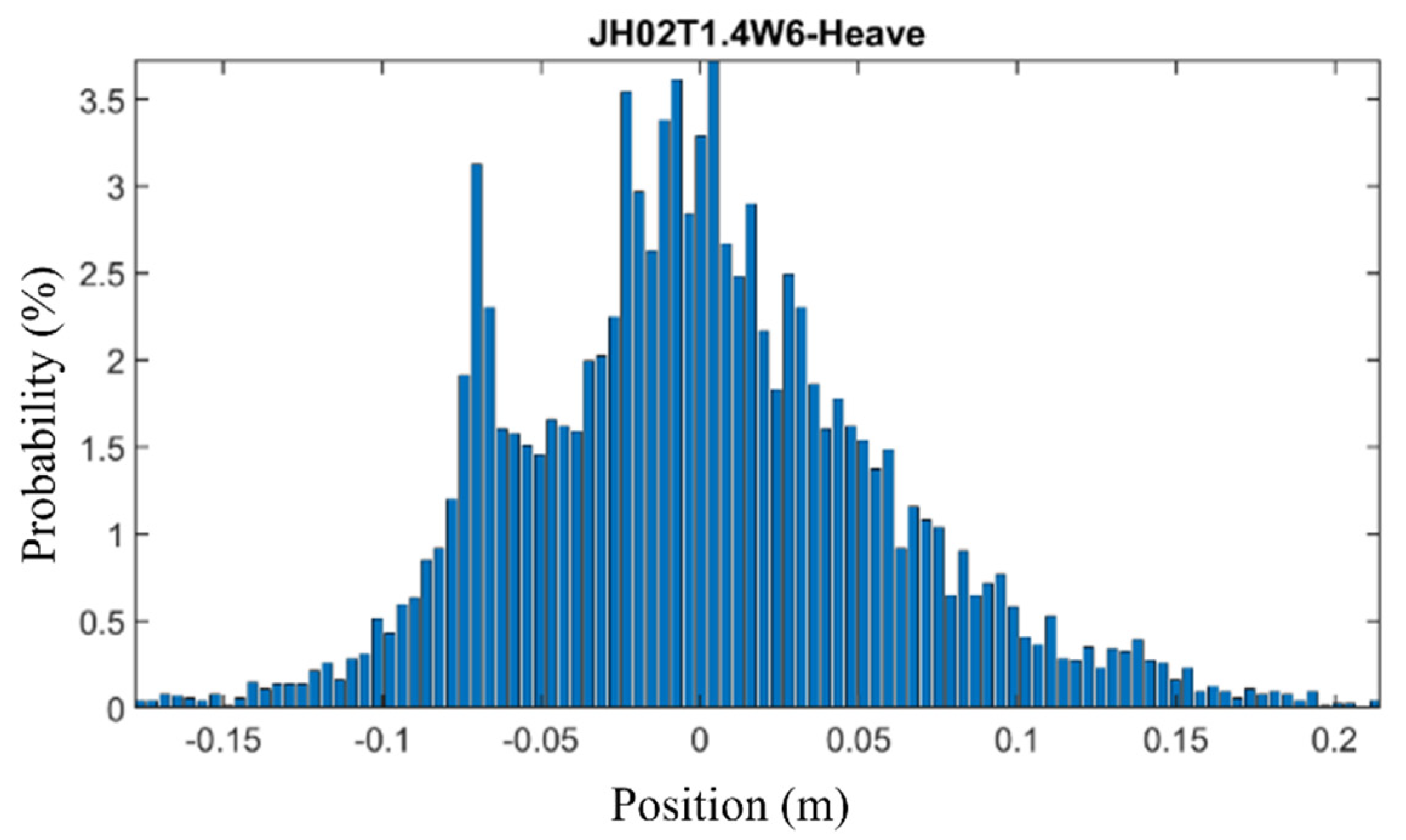
3.6. Motion and Tension Results from Experiment
4. Conclusions
- Based on the results of free decay test simulation and fast Fourier transform, it is revealed that the natural period of the FPV platform was within 2 seconds in the heave and pitch directions, which indicates that the floating platform was prone to resonance in high-frequency wave conditions. Hence, careful consideration should be given to the stability of the FPV structure.
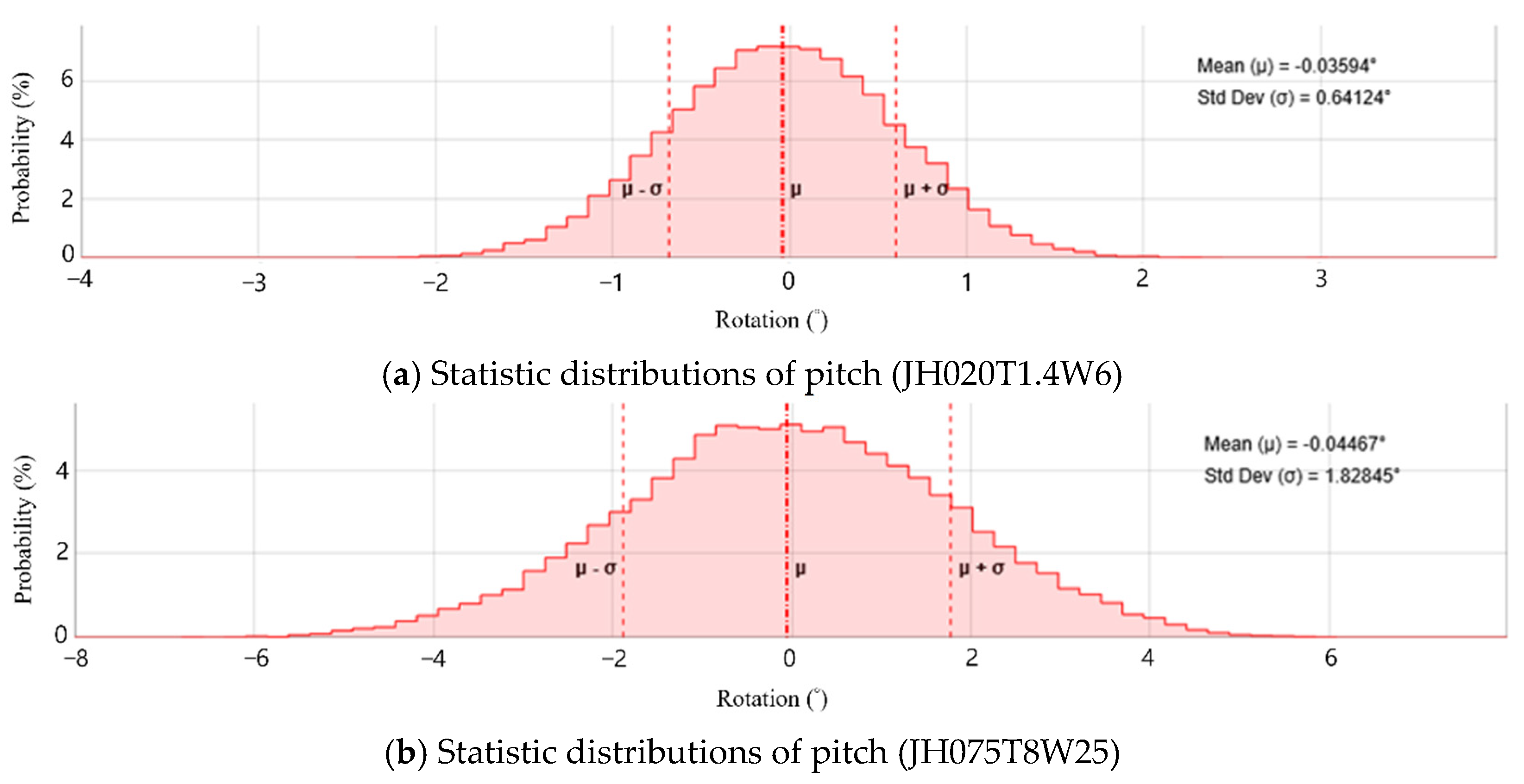
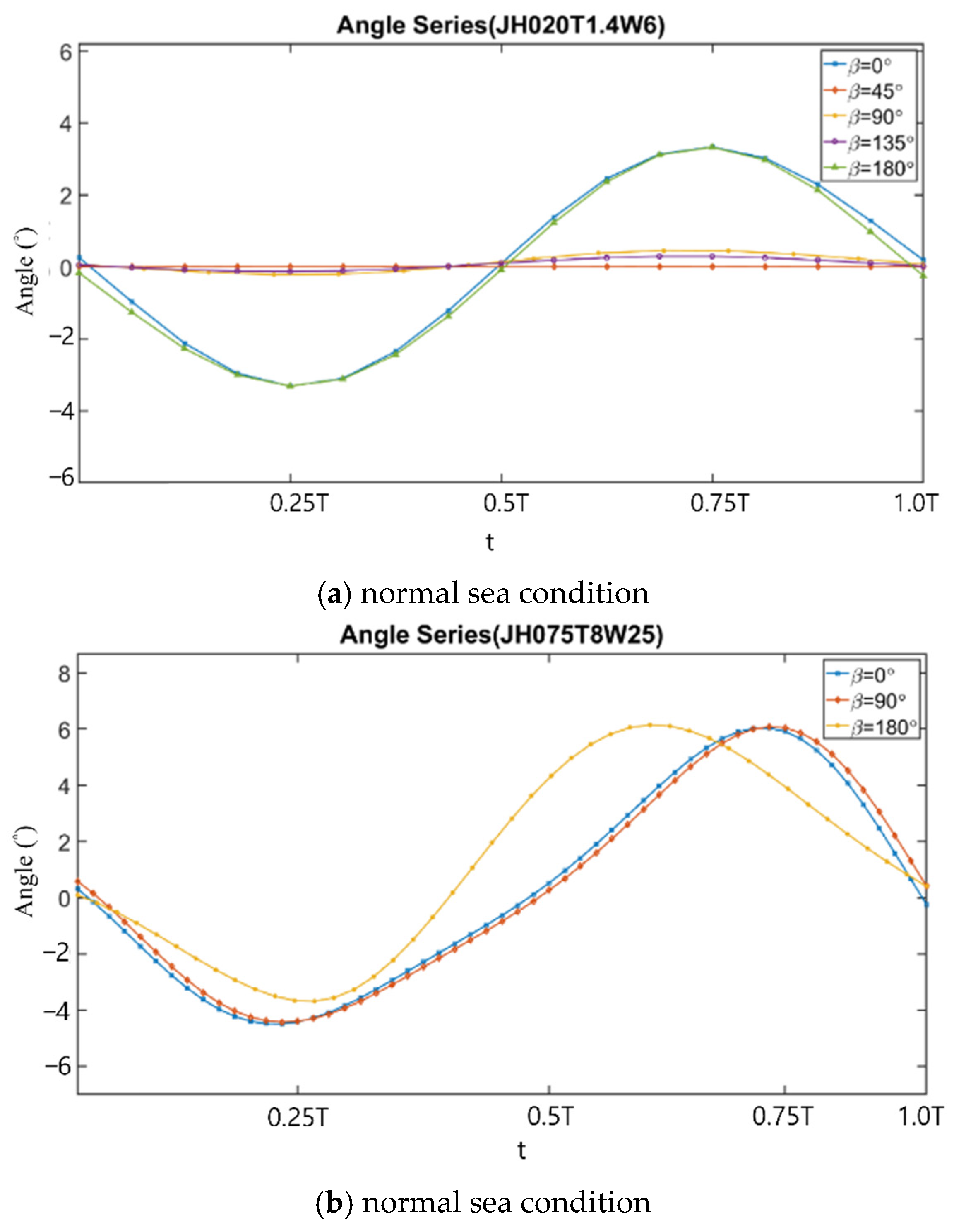
- According to the simulation results of extreme sea conditions in this study, the pitch motion of the floating platform changed about ±6° without overturning; however, the stability of the FPV system should still be monitored in field applications. Meanwhile, under normal sea conditions, the angle of the FPV platform varied within ±2°, which shows that the power generation efficiency can be ensured.
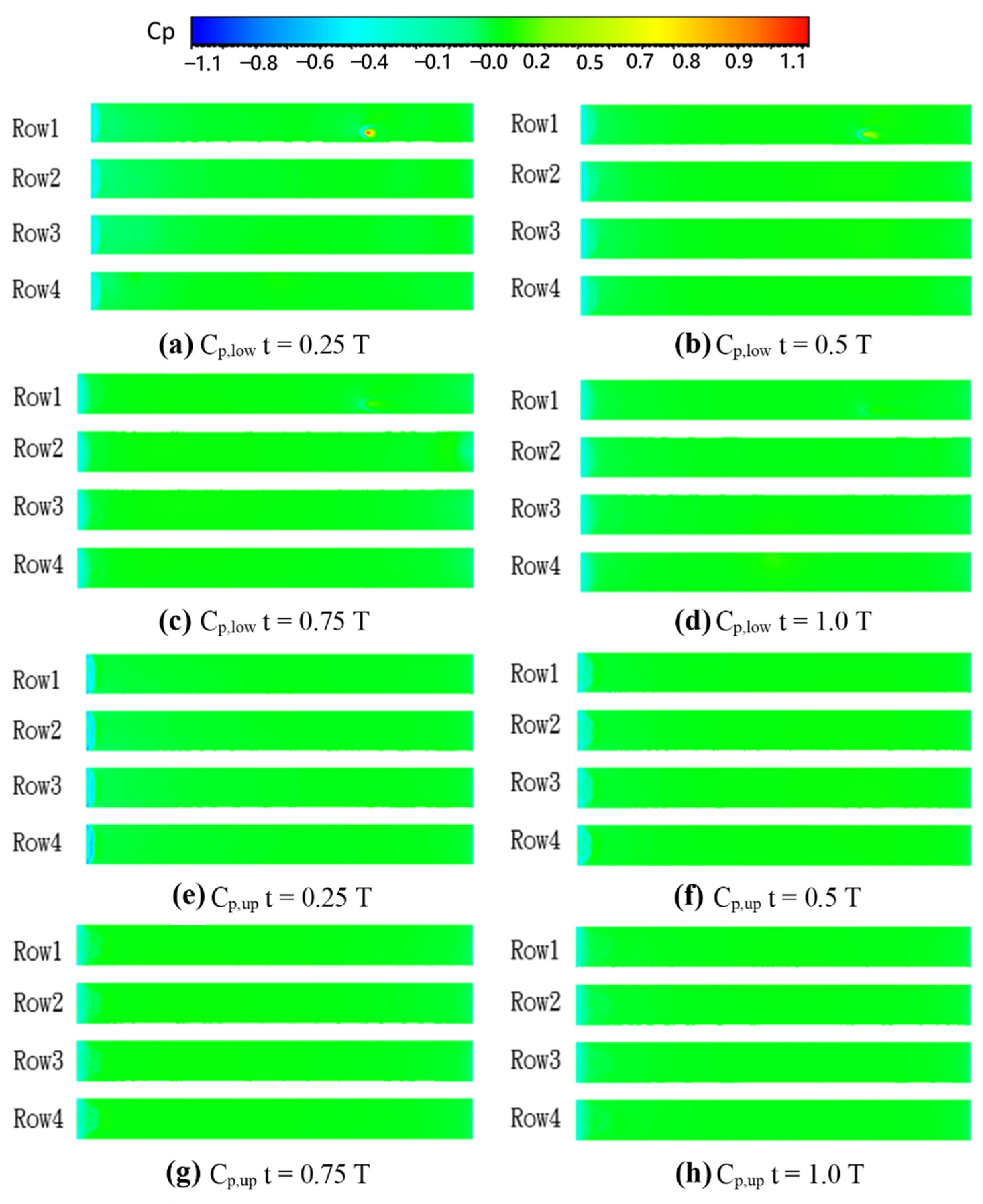
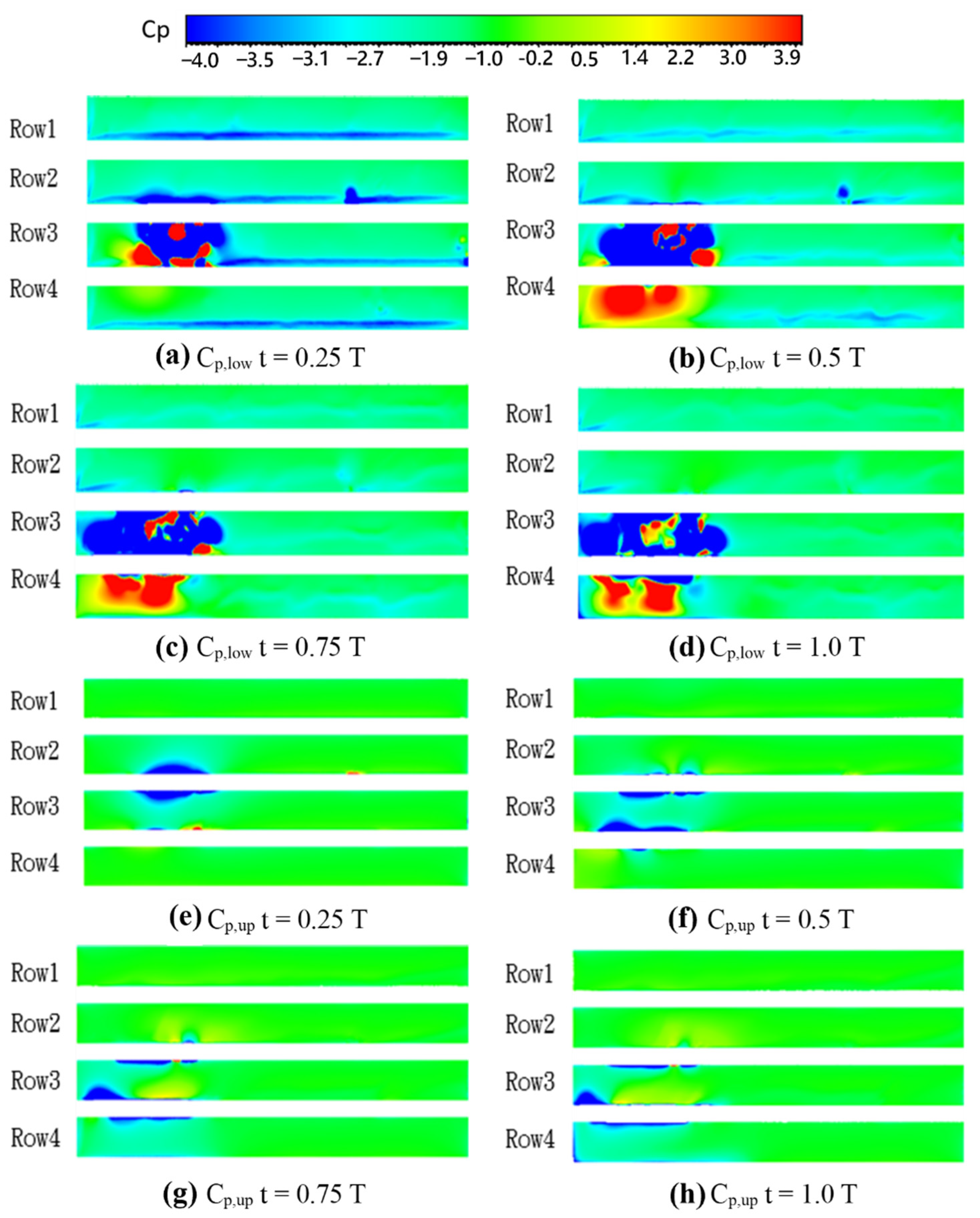
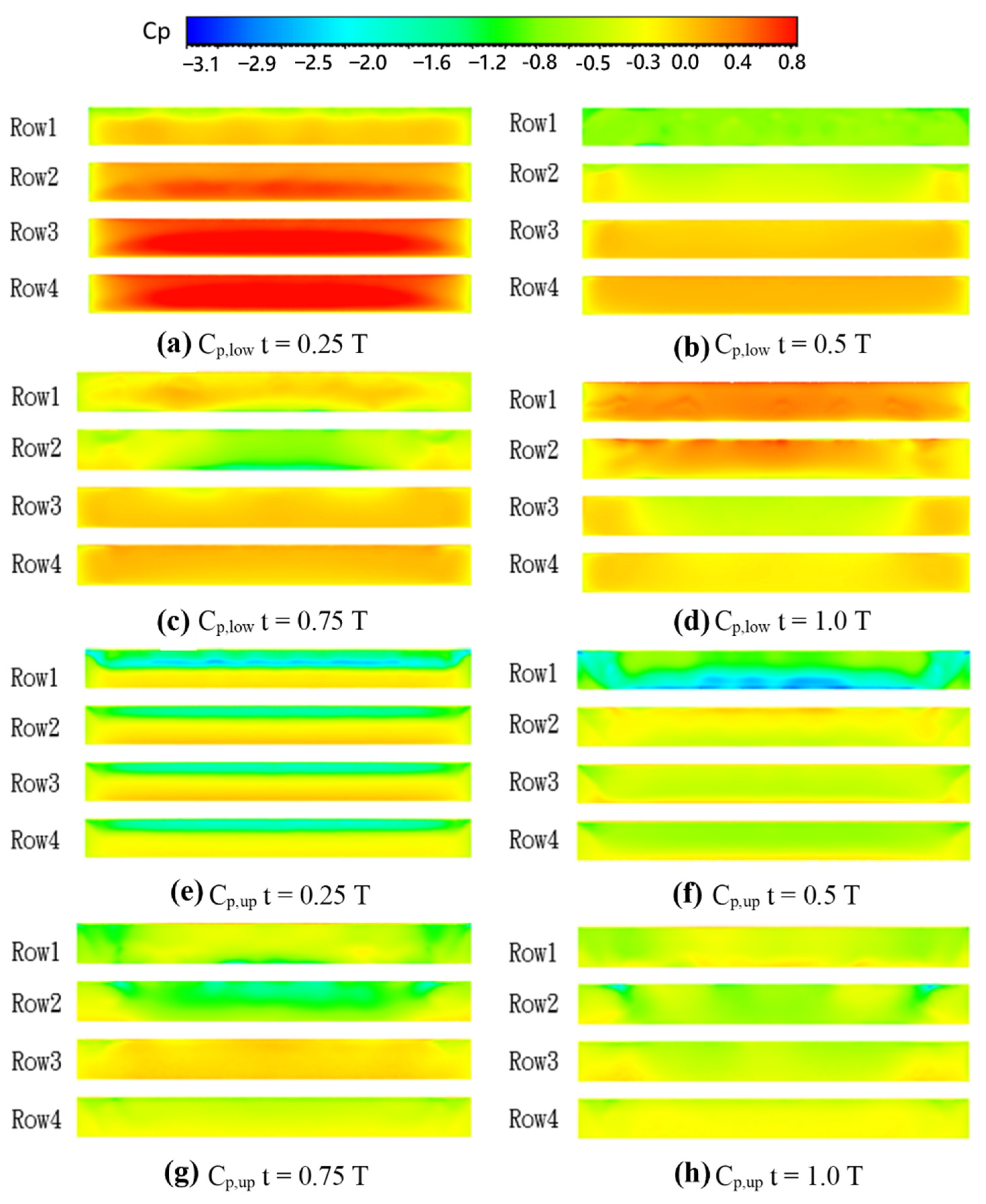
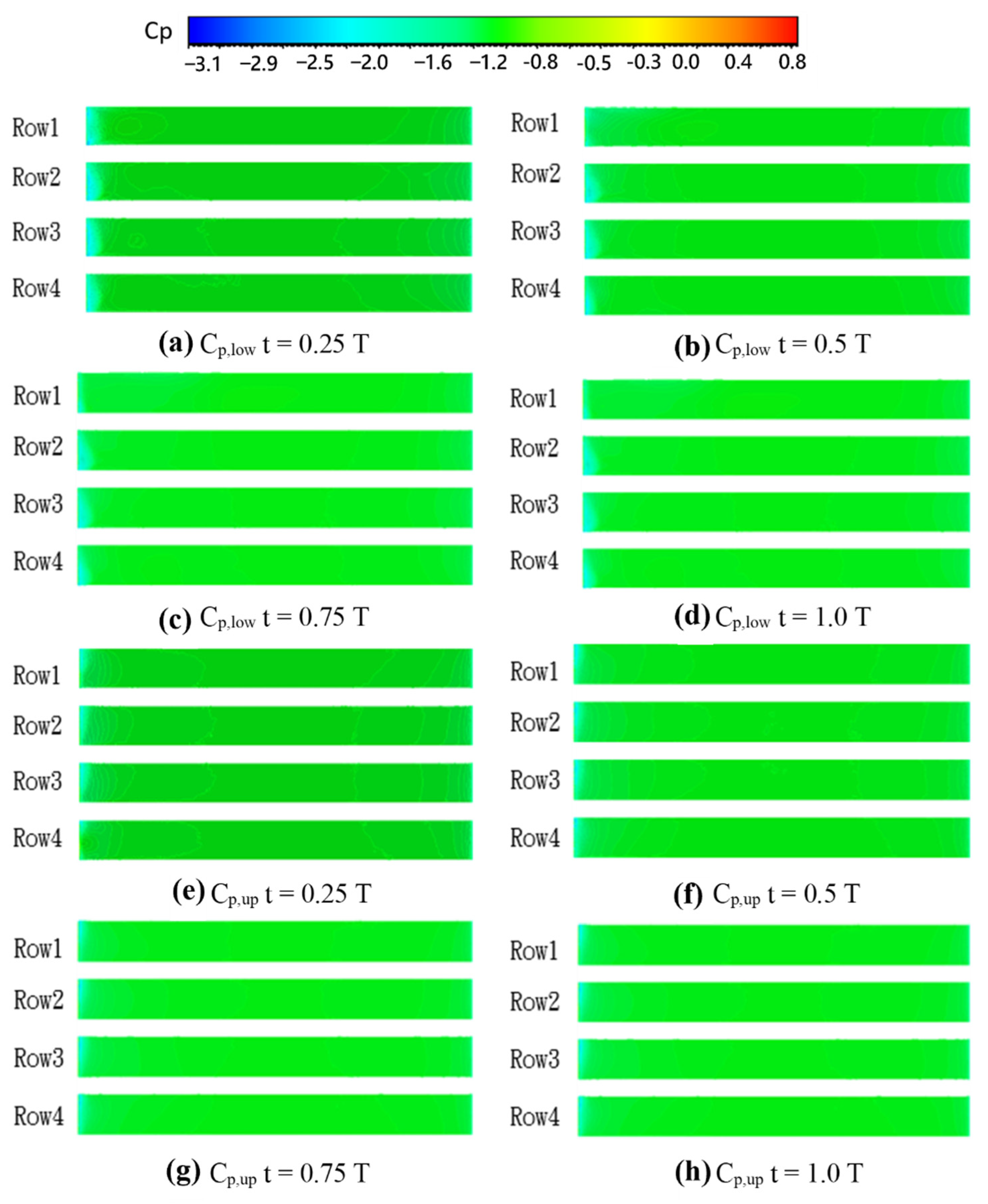
- For the distribution of the surface pressure coefficient of the solar panel, the cases of different wave and wind directions were investigated in this study. It was observed that once the front edge of the solar photovoltaic panel was in contact with the incoming wind, a separated flow would be generated, and then the circulation airflow would be generated upstream of the solar photovoltaic panel to form a negative pressure area. At the two edges of the short sides, angular vortices were formed at the relative positions due to the downward air curling up on the upper surface, indicating that the front edge and side edges of the solar photovoltaic panel were easily affected by the wind flow, thus affecting its stability.
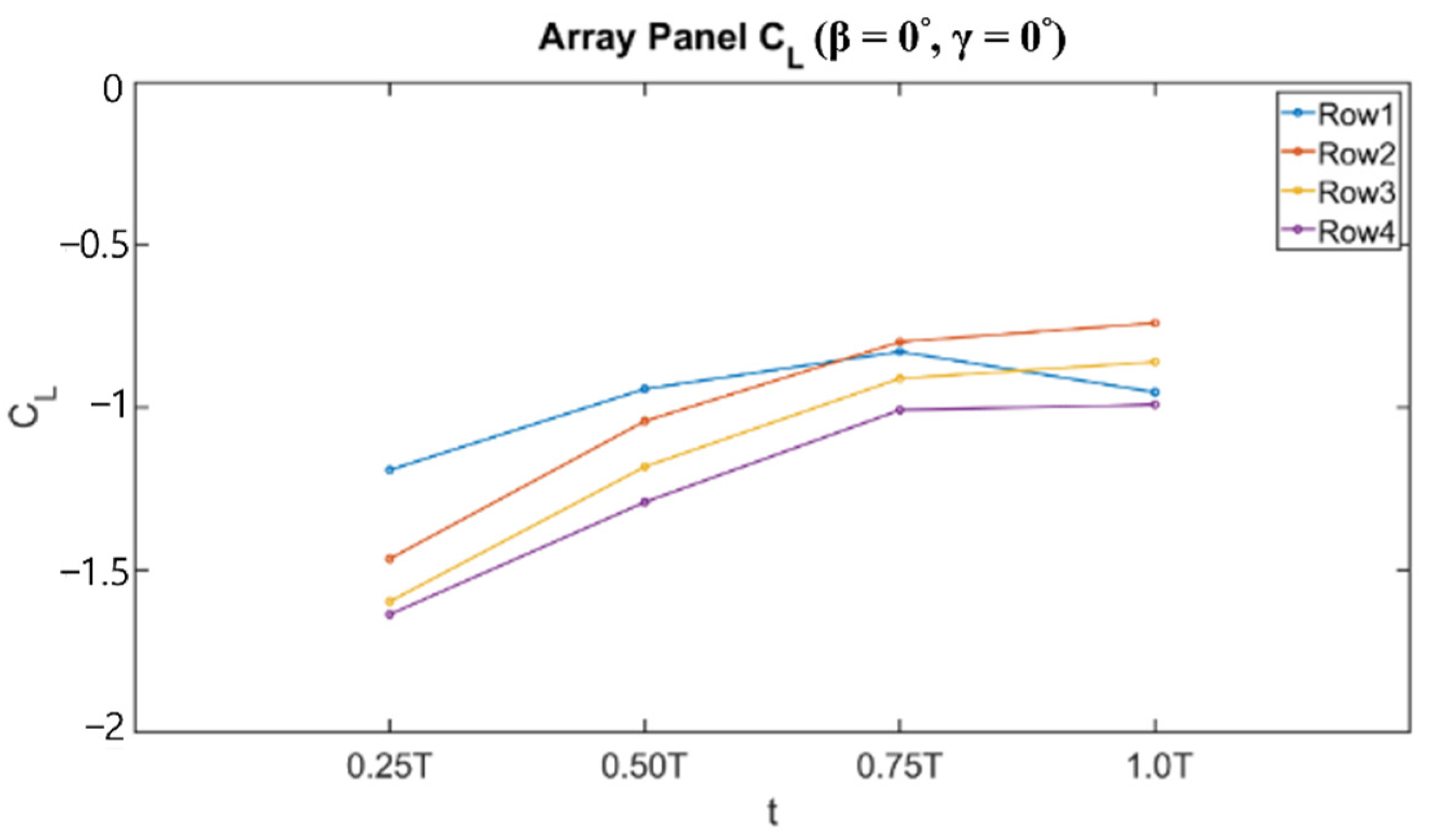
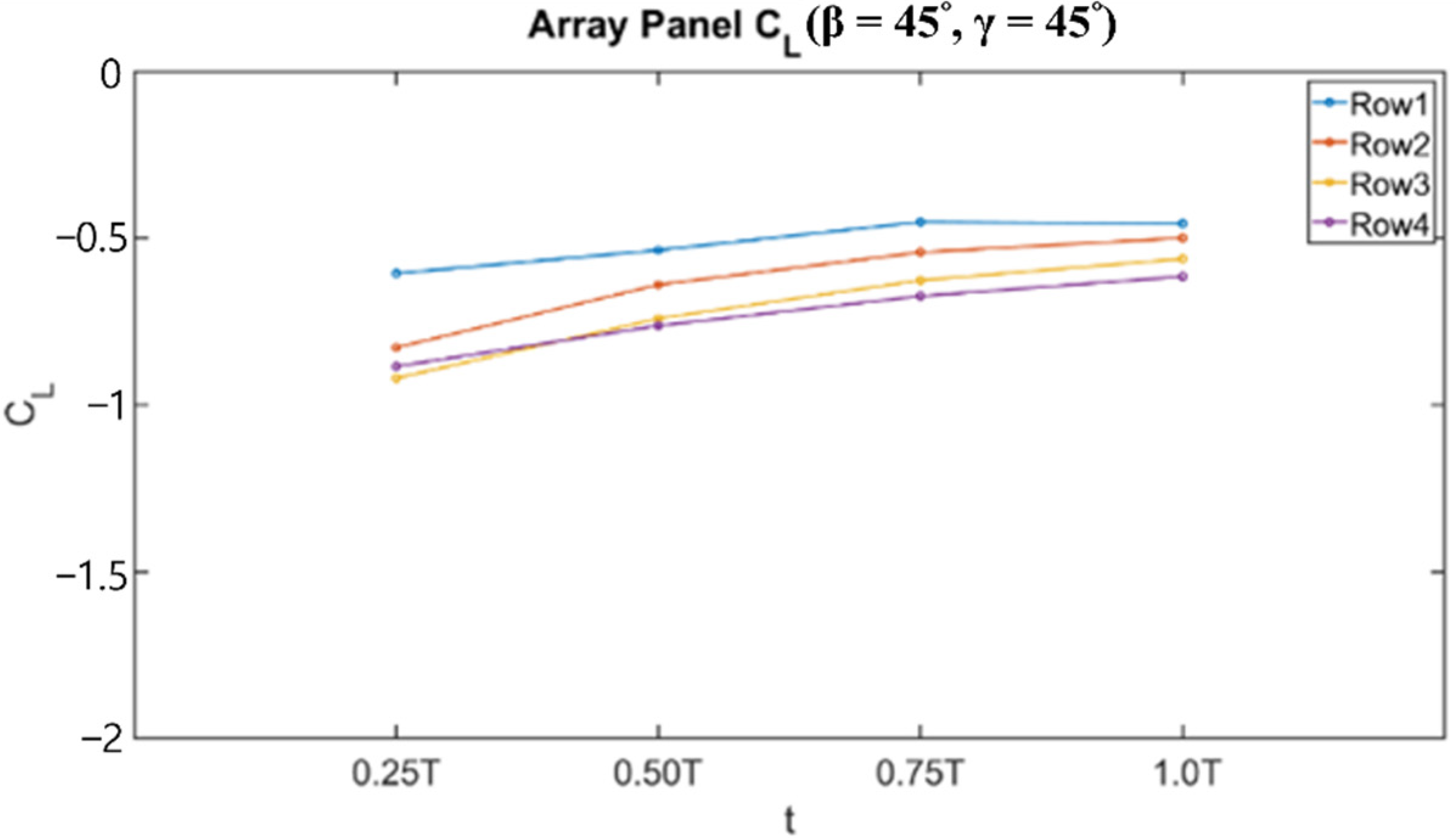
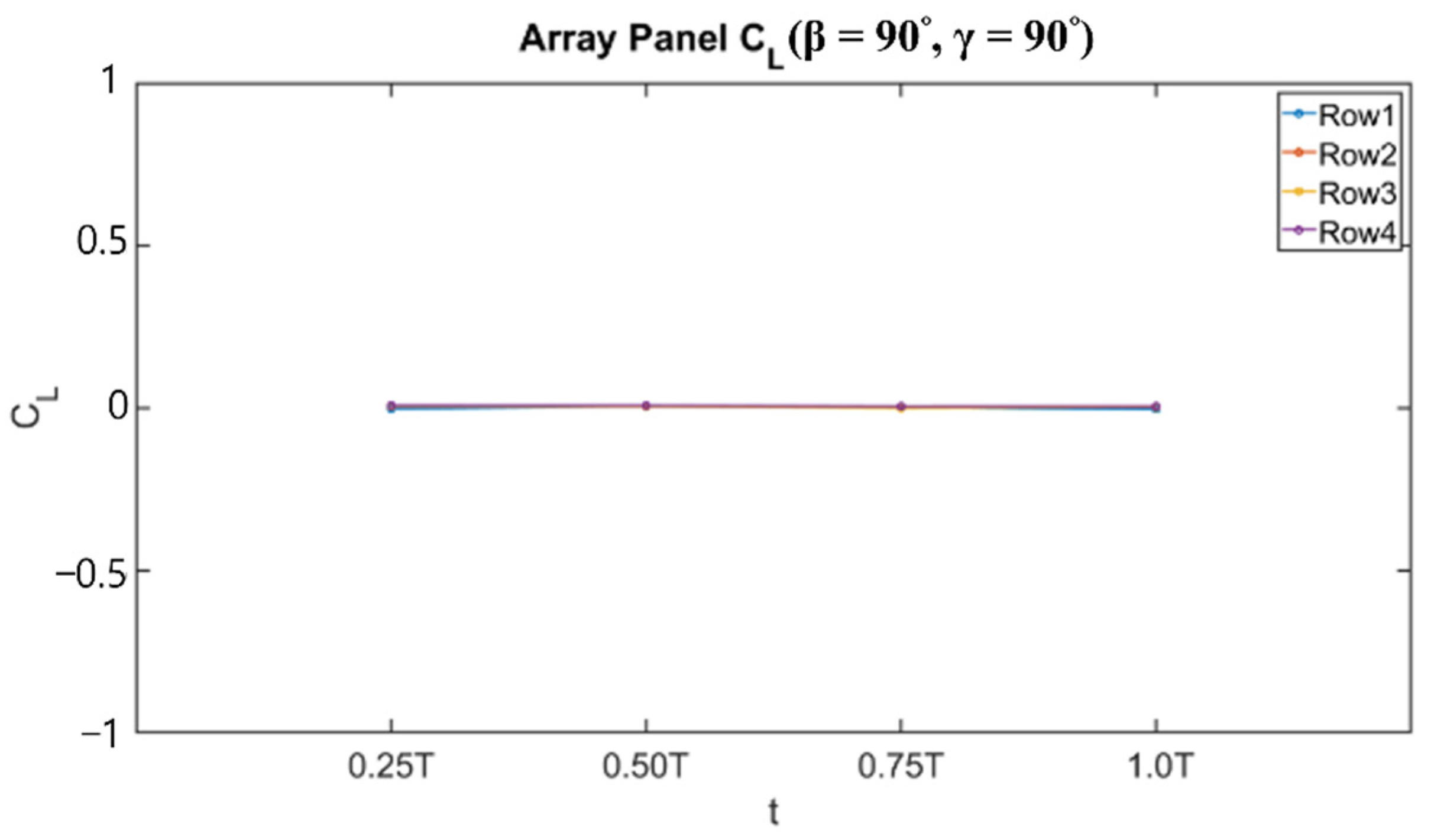
- From the surface pressure coefficient patterns, it can be derived that when the wind direction changed, the upper and lower surface pressure distribution of the solar panels would also shift accordingly. According to the lift coefficient results, it is found that when the wave period stage changed with different angles between wave and wind loads, the lift coefficient increased with the increasing angle between wave and wind loads. However, there was a maximum lift force when the wave and wind directions were 0° and t = 0.25T.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sahu, A.; Yadav, N.; Sudhakar, K. Floating photovoltaic power plant: A review. Renew. Sustain. Energy Rev. 2016, 66, 815–824. [Google Scholar] [CrossRef]
- IRENA. Renewable Capacity Highlights. 2020. Available online: https://www.irena.org/-/media/Files/IRENA/Agency/Publication/2021/Apr/IRENA_-RE_Capacity_Highlights_2021.pdf?la=en&hash=1E133689564BC40C2392E85026F71A0D7A9C0B91 (accessed on 18 September 2020).
- Rosa-Clot, M.; Tina, G.M. Current Status of FPV and Trends. In Floating PV Plants; Elsevier: Amsterdam, The Netherlands, 2020; pp. 9–18. [Google Scholar]
- DNV GL. DNVGL-RP-0584. Design Development and Operation of Floating Solar Photovoltaic Systems. 2021. Available online: https://rules.dnv.com/docs/pdf/DNV/RP/2021-03/DNVGL-RP-0584.pdf (accessed on 22 May 2021).
- World Bank Group. Where Sun Meets Water-Floating Solar Market Report; World Bank Group: Washington, DC, USA, 2018. [Google Scholar]
- Oliveira-Pinto, S.; Stokkermans, J. Assessment of the potential of different floating solar technologies—Overview and analysis of different case studies. Energy Convers. Manag. 2020, 211, 112747. [Google Scholar] [CrossRef]
- Trapani, K.; Santafé, M.R. A review of floating photovoltaic installations: 2007–2013. Prog. Photovolt. Res. Appl. 2015, 23, 524–532. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Wang, Q.; Lin, H.; Li, H.; Sun, Q. Power Generation Efficiency and Prospects of Floating Photovoltaic Systems. Energy Procedia 2017, 105, 1136–1142. [Google Scholar] [CrossRef]
- Cazzaniga, R.; Cicu, M.; Rosa-Clot, M.; Rosa-Clot, P.; Tina, G.M.; Ventura, C. Floating photovoltaic plants: Performance analysis and design solutions. Renew. Sustain. Energy Rev. 2018, 81, 1730–1741. [Google Scholar] [CrossRef]
- Campana, P.E.; Wästhage, L.; Nookuea, W.; Tan, Y.; Yan, J. Optimization and assessment of floating and floating-tracking PV systems integrated in on- and off-grid hybrid energy systems. Sol. Energy 2019, 177, 782–795. [Google Scholar] [CrossRef]
- Kim, S.-H.; Yoon, S.J.; Choi, W.; Choi, K.B. Application of Floating Photovoltaic Energy Generation Systems in South Korea. Sustainability 2016, 8, 1333. [Google Scholar] [CrossRef] [Green Version]
- Jamalludin, M.A.S.; Muhammad-Sukki, F.; Abu-Bakar, S.H.; Ramlee, F.; Munir, A.B.; Bani, N.A.; Muhtazaruddin, M.N.; Mas’ud, A.A.; Ardila-Rey, J.A.; Ayub, A.S.; et al. Potential of floating solar technology in Malaysia. Int. J. Power Electron. Drive Syst. (IJPEDS) 2019, 10, 1638–1644. [Google Scholar] [CrossRef] [Green Version]
- Silvério, N.M.; Barros, R.M.; Tiago Filho, G.L.; Redón-Santafé, M.; dos Santos, I.F.S.; de Mello Valerio, V.E. Use of floating PV plants for coordinated operation with hydropower plants: Case study of the hydroelectric plants of the São Francisco River basin. Energy Convers. Manag. 2018, 171, 339–349. [Google Scholar] [CrossRef]
- Rauf, H.; Gull, M.S.; Arshad, N. Integrating Floating Solar PV with Hydroelectric Power Plant: Analysis of Ghazi Barotha Reservoir in Pakistan. Energy Procedia 2019, 158, 816–821. [Google Scholar] [CrossRef]
- Mittal, D.; Saxena, B.K.; Rao, K.V.S. Floating solar photovoltaic systems: An overview and their Feasibility at kota in Rajasthan. In Proceedings of the International Conference on Circuits Power and Computing Technologies, Kollam, India, 20–21 April 2017. [Google Scholar]
- Hsu, S.-T.; Lin, W.-Y.; Wu, J.-J. Environmental Factors of non-unitorm Dynamic Mechanical Load Test due to Wind Actions on Photovoltaic Modules. Energy Procedia 2018, 150, 50–57. [Google Scholar] [CrossRef]
- Choi, Y.-K. A Study on Power Generation Analysis of Floating PV System Considering Environmental Impact. Int. J. Softw. Eng. Its Appl. 2014, 8, 75–84. [Google Scholar] [CrossRef]
- ANSYS. Aqwa Theory Manual. Available online: https://cyberships.files.wordpress.com/2014/01/wb_aqwa.pdf (accessed on 16 July 2020).
- ANSYS. ANSYS Fluent Theory Guide. Available online: https://www.afs.enea.it/project/neptunius/docs/fluent/html/th/main_pre.htm (accessed on 22 August 2020).
- Su, K.-C.; Chung, P.-H.; Yang, R.-Y. Numerical simulation of wind loads on an offshore PV panel. J. Mech. 2020, 37, 53–62. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- SHIH, T.-H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A new k-e eddy-viscosity model for high Reynolds number turbulent flows. Compurers Fluid 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Chung, P.-H.; Chou, C.C.; Yang, R.Y.; Chung, C.Y. Wind Loads on a PV Array. Appl. Sci. 2019, 9, 2466. [Google Scholar] [CrossRef] [Green Version]
- Chuang, T.-C.; Yang, W.-H.; Yang, R.-Y. Experimental and numerical study of a barge-type FOWT platform under wind and wave load. Ocean Eng. 2021, 230, 109015. [Google Scholar] [CrossRef]
- Chung, K.-M.; Chang, K.-C.; Chou, C.-C. Wind loads on residential and large-scale solar collector models. J. Wind Eng. Ind. Aerodyn. 2011, 99, 59–64. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FPV System Properties | |
|---|---|
| Mass (kg) | 3639.4 |
| XCG (m) | 0 |
| YCG (m) | 0 |
| ZCG below sea level (m) | 0 |
| Roll inertia (kg·m2) | 15,452 |
| Pitch inertia (kg·m2) | 65,646 |
| Yaw inertia (kg·m2) | 80,873 |
| platform size (L × W × H) (m) | 13.19 × 6.294 × 0.2 |
| Panel size (L × w) (m) | 9.84 × 0.992 |
| Tilt angle (°) | 10 |
| Mooring Properties of FPV System | |
|---|---|
| Diameter (m) | 0.04 |
| Unit weight (kg/m) | 27.88 |
| Number of mooring lines | 4 |
| Unstretched mooring line length (m) | 22 |
| Breaking load (kN) | 1788.67 |
| Stiffness (kN) | 136,640 |
| Case Name | Water Depth (m) | Wave Condition | Wind Condition | |||
|---|---|---|---|---|---|---|
| Wave Height (m) | Wave Period (s) | Wave Direction (°) | Wind Speed (m/s) | Wind Direction (°) | ||
| JH020T1.4W6 (normal conditions) | 2.5 | 0.20 | 1.4 | 0 | 6 | 0 |
| 45 | 45 | |||||
| 90 | 90 | |||||
| 135 | 135 | |||||
| 180 | 180 | |||||
| JH075T8W25 (extreme conditions) | 5 | 0.75 | 8 | 0 | 25 | 0 |
| 90 | ||||||
| 180 | ||||||
| Natural Period | Heave | Roll | Pitch |
|---|---|---|---|
| Experiment | 1.1 s | 2.0 s | 0.5 (1.4) s |
| AQWA | 1.0 s | 1.0 s | 1.4 s |
| Normal Sea Condition | Extreme Sea Condition | |||||
|---|---|---|---|---|---|---|
| Surge | Heave | Pitch | Surge | Heave | Pitch | |
| Mean | 1.31 m | 0 m | −0.04° | 0.1 m | 0 m | −0.04° |
| Standard deviation | 0.38 m | 0 m | 0.64° | 0.62 m | 0.18 m | 1.82° |
| Motion Response of FPV | |||
|---|---|---|---|
| Surge | Heave | Pitch | |
| AQWA | 1.0 m | ±0.03 m | ±2° |
| Experiment | 0.5 m | ±0.2 m | ±2° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, R.-Y.; Yu, S.-H. A Study on a Floating Solar Energy System Applied in an Intertidal Zone. Energies 2021, 14, 7789. https://doi.org/10.3390/en14227789
Yang R-Y, Yu S-H. A Study on a Floating Solar Energy System Applied in an Intertidal Zone. Energies. 2021; 14(22):7789. https://doi.org/10.3390/en14227789
Chicago/Turabian StyleYang, Ray-Yeng, and Sheng-Hung Yu. 2021. "A Study on a Floating Solar Energy System Applied in an Intertidal Zone" Energies 14, no. 22: 7789. https://doi.org/10.3390/en14227789