
Short-Term Forecasting of Wind Energy: A Comparison of Deep Learning Frameworks


Abstract
:1. Introduction
2. Data, Models, and Methodology
2.1. Dataset Description
2.2. Deep Learning Strategies for Time Series Forecasting Using LSTM
2.2.1. LSTM RNNs Based Models Description
2.2.2. Vanilla LSTM
2.2.3. Bidirectional LSTM
2.2.4. Stacked LSTM
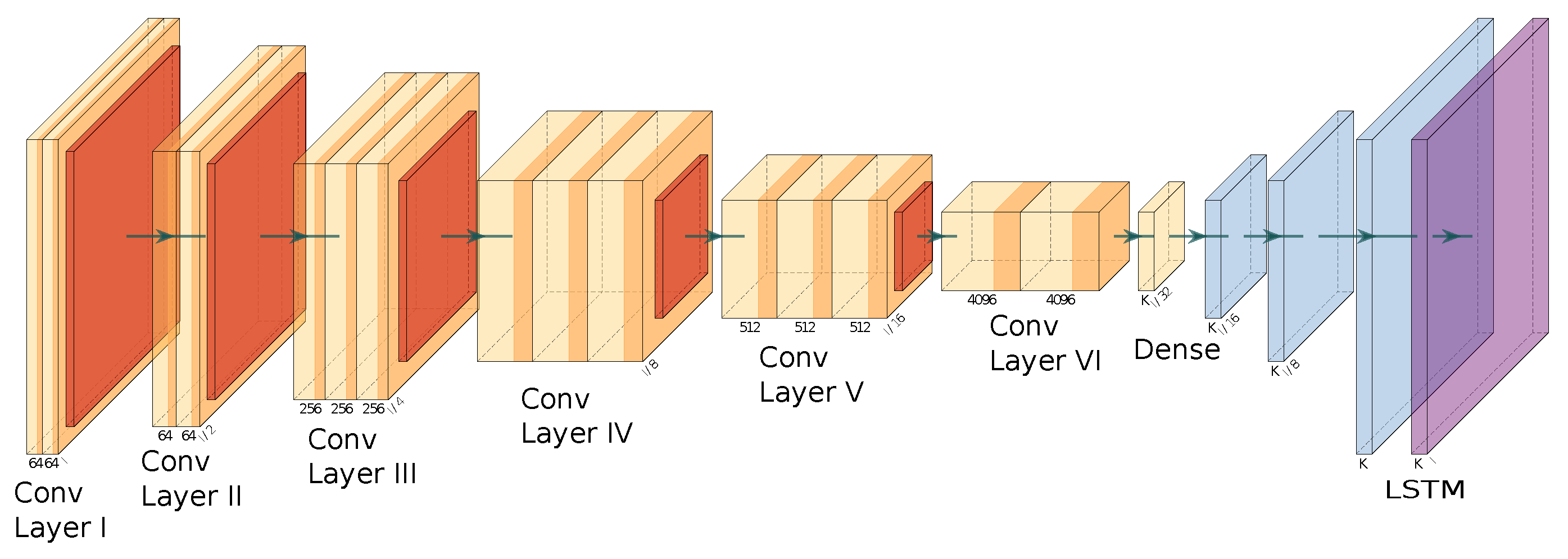
2.2.5. Convolutional LSTM
2.2.6. Autoencoder LSTM
2.3. Implementation Methodology
| Algorithm 1 Vanilla LSTM |
|
| Algorithm 2 Stacked LSTM |
|
| Algorithm 3 Bidirectional LSTM |
|
| Algorithm 4 CNN LSTM |
|
| Algorithm 5 Autoencoder LSTM |
|
2.4. Evaluation Metrics
3. Wind Power Forecasting—Experimental Results
3.1. One-Step Forecasting
3.2. One-to-Three-Steps Forecasting
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| AE | Autoencoder |
| ANN | Artificial Neural Network |
| ARIMA | Autoregressive Integrated Moving Average Model |
| BPNN | Back Propagation Neural Networks |
| ConvLSTM | Convolutional LSTM |
| CNN | Convolutional Neural Network |
| DE | Differential Evolution |
| DL | Deep Learning |
| DW | Discrete Wavelet Transform |
| ESN | Echo State Network |
| FFNN | Feed-Forward Neural Networks |
| GA | Genetic Algorithm |
| GHG | GreenHouse Gas |
| GLSTM | Genetic Long Short-Term Memory |
| KF | Kalman filter |
| LMBNN | Levenberg–Marquardt Backpropagation Neural Network |
| LSTM | Long Short-Term Memory |
| MAPE | Mean Absolute Percentage Error |
| MARS | Multivariate Adaptive Regression Splines |
| ML | Machine Learning |
| MSE | Mean Square Error |
| NWP | Numerical Weather Prediction |
| PCA | Principal Component Analysis |
| Quantile–Quantile | |
| RMSE | Root Mean Square Error |
| RNN | Recurrent Neural Network |
| STSR-LSTM | Sequence-to-sequence Long Short-term Memory Regression |
| SVM | Support Vector Machine |
| VMD | Variational Mode Decomposition |
References
- Tong, W. Wind Power Generation and Wind Turbine Design, 1st ed.; WIT Press: Billerica, MA, USA, 2010. [Google Scholar]
- Renewables 2020 Global Status Report. 2020. Available online: https://ren21.net/gsr-2020/ (accessed on 1 August 2021).
- Li, L.; Lin, J.; Wu, N.; Xie, S.; Meng, C.; Zheng, Y.; Wang, X.; Zhao, Y. Review and outlook on the international renewable energy development. Energy Built Environ. 2020, in press. [Google Scholar] [CrossRef]
- Giebel, G.; Kariniotakis, G.; Brownsword, R. The state-of-the-art in short term prediction of wind power from a danish perspective. In Proceedings of the 4th International Workshop on Large Scale Integration of Wind Power and Transmission Networks for Offshore Wind Farms, Billund, Denmark, 20–21 October 2003. [Google Scholar]
- Du, P.; Wang, J.; Yang, W.; Niu, T. A novel hybrid model for short-term wind power forecasting. Appl. Soft Comput. 2019, 80, 93–106. [Google Scholar] [CrossRef]
- Marulanda, G.; Bello, A.; Cifuentes Quintero, J.; Reneses, J. Wind Power Long-Term Scenario Generation Considering Spatial-Temporal Dependencies in Coupled Electricity Markets. Energies 2020, 13, 3427. [Google Scholar] [CrossRef]
- Ren, Y.; Suganthan, P.; Srikanth, N. Ensemble methods for wind and solar power forecasting—A state-of-the-art review. Renew. Sustain. Energy Rev. 2015, 50, 82–91. [Google Scholar] [CrossRef]
- Cao, Y.; Gui, L. Multi-Step wind power forecasting model Using LSTM networks, Similar Time Series and LightGBM. In Proceedings of the 2018 5th International Conference on Systems and Informatics (ICSAI), Nanjing, China, 10–12 November 2018; pp. 192–197. [Google Scholar] [CrossRef]
- Abdelaziz, A.Y.; Rahman, M.A.; El-Khayat, M.; Hakim, M. Short term wind power forecasting using autoregressive integrated moving average modeling. In Proceedings of the 15th International Middle East Power Systems Conference, Alexandria, Egypt, 23–25 December 2012. [Google Scholar]
- Cifuentes, J.; Marulanda, G.; Bello, A.; Reneses, J. Air temperature forecasting using machine learning techniques: A review. Energies 2020, 13, 4215. [Google Scholar] [CrossRef]
- Rodriguez, M.A.; Sotomonte, J.F.; Cifuentes, J.; Bueno-López, M. A Classification Method for Power-Quality Disturbances Using Hilbert–Huang Transform and LSTM Recurrent Neural Networks. J. Electr. Eng. Technol. 2020, 16, 249–266. [Google Scholar] [CrossRef]
- Eseye, A.; Zhang, J.; Zheng, D.; Shiferaw, D. Short-Term Wind Power Forecasting Using Artificial Neural Networks for Resource Scheduling in Microgrids. Int. J. Sci. Eng. Appl. 2016, 5, 144–151. [Google Scholar] [CrossRef]
- Shi, J.; Liu, Y.; Yang, Y.; Lee, W. Short-term wind power prediction based on wavelet transform-support vector machine and statistic characteristics analysis. In Proceedings of the 2011 IEEE Industrial and Commercial Power Systems Technical Conference, Newport Beach, CA, USA, 1–5 May 2011; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Makhloufi, S.; Pillai, G.G. Wind speed and wind power forecasting using wavelet denoising-GMDH neural network. In Proceedings of the 2017 5th International Conference on Electrical Engineering-Boumerdes (ICEE-B), Boumerdes, Algeria, 29–31 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Elattar, E.E.; Goulermas, J.Y.; Wu, Q.H. Generalized locally weighted GMDH for short term load forecasting. IEEE Trans. Syst. Man Cybern. Part (Appl. Rev.) 2011, 42, 345–356. [Google Scholar] [CrossRef]
- Yuan, X.; Chen, C.; Yuan, Y.; Huang, Y.; Tan, Q. Short-term wind power prediction based on LSSVM–GSA model. Energy Convers. Manag. 2015, 101, 393–401. [Google Scholar] [CrossRef]
- Tascikaraoglu, A.; Uzunoglu, M. A review of combined approaches for prediction of short-term wind speed and power. Renew. Sustain. Energy Rev. 2014, 34, 243–254. [Google Scholar] [CrossRef]
- Yildiz, C.; Acikgoz, H.; Korkmaz, D.; Budak, U. An improved residual-based convolutional neural network for very short-term wind power forecasting. Energy Convers. Manag. 2021, 228, 113731. [Google Scholar] [CrossRef]
- Shewalkar, A.; Nyavanandi, D.; Ludwig, S.A. Performance evaluation of deep neural networks applied to speech recognition: RNN, LSTM and GRU. J. Artif. Intell. Soft Comput. Res. 2019, 9, 235–245. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Zhou, K.; Lu, X.; Yang, S. A hybrid deep learning model for short-term PV power forecasting. Appl. Energy 2020, 259, 114216. [Google Scholar] [CrossRef]
- Althelaya, K.A.; El-Alfy, E.S.M.; Mohammed, S. Stock market forecast using multivariate analysis with bidirectional and stacked (LSTM, GRU). In Proceedings of the 2018 21st Saudi Computer Society National Computer Conference (NCC), Riyadh, Saudi Arabia, 25–26 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–7. [Google Scholar]
- Qu, X.; Kang, X.; Zhang, C.; Jiang, S.; Ma, X. Short-term prediction of wind power based on deep Long Short-Term Memory. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 1148–1152. [Google Scholar] [CrossRef]
- Liu, Y.; Guan, L.; Hou, C.; Han, H.; Liu, Z.; Sun, Y.; Zheng, M. Wind Power Short-Term Prediction Based on LSTM and Discrete Wavelet Transform. Appl. Sci. 2019, 9, 1108. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.; Zhao, M. Short-Term Wind Power Forecasting Based on VMD Decomposition, ConvLSTM Networks and Error Analysis. IEEE Access 2020, 8, 134422–134434. [Google Scholar] [CrossRef]
- Ye, R.; Suganthan, P.N.; Srikanth, N.; Sarkar, S. A hybrid ARIMA-DENFIS method for wind speed forecasting. In Proceedings of the 2013 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), New Orleans, LA, USA, 23–26 June 2019; IEEE: Piscataway, NJ, USA, 2013; pp. 1–6. [Google Scholar]
- Lee, S.; Kim, J. Predicting Inflow Rate of the Soyang River Dam Using Deep Learning Techniques. Water 2021, 13, 2447. [Google Scholar] [CrossRef]
- Salcedo-Sanz, S.; Pastor-Sánchez, A.; Prieto, L.; Blanco-Aguilera, A.; García-Herrera, R. Feature selection in wind speed prediction systems based on a hybrid coral reefs optimization–Extreme learning machine approach. Energy Convers. Manag. 2014, 87, 10–18. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, X.; Lu, L.; Deng, W.; Zuo, K. Fast near-infrared palmprint recognition using nonnegative matrix factorization extreme learning machine. Opt. Appl. 2014, 44, 285–298. [Google Scholar]
- Liang, S.; Nguyen, L.; Jin, F. A Multi-variable Stacked Long-Short Term Memory Network for Wind Speed Forecasting. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 4561–4564. [Google Scholar] [CrossRef] [Green Version]
- Vinothkumar, T.; Deeba, K. Hybrid wind speed prediction model based on recurrent long short-term memory neural network and support vector machine models. Soft Comput. 2020, 24, 5345–5355. [Google Scholar] [CrossRef]
- Kilic, H.; Yuzgec, U.; Karakuzu, C. A novel improved antlion optimizer algorithm and its comparative performance. Neural Comput. Appl. 2020, 32, 3803–3824. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Y.; Dong, Z.; Su, J.; Han, Z.; Zhou, D.; Zhao, Y.; Bao, Y. 2-D regional short-term wind speed forecast based on CNN-LSTM deep learning model. Energy Convers. Manag. 2021, 244, 114451. [Google Scholar] [CrossRef]
- Hu, H.; Wang, L.; Tao, R. Wind speed forecasting based on variational mode decomposition and improved echo state network. Renew. Energy 2021, 164, 729–751. [Google Scholar] [CrossRef]
- Shahid, F.; Zameer, A.; Muneeb, M. A novel genetic LSTM model for wind power forecast. Energy 2021, 223, 1200692. [Google Scholar] [CrossRef]
- Ahmad, T.; Zhang, D. A data-driven deep sequence-to-sequence long-short memory method along with a gated recurrent neural network for wind power forecasting. Energy 2022, 239, 122109. [Google Scholar] [CrossRef]
- Spanish Wind Energy Association—Wind Energy in Spain. 2021. Available online: https://aeeolica.org/en/about-wind-energy/wind-energy-in-spain/ (accessed on 1 August 2021).
- Spanish Peninsula—Electricity Demand Tracking in Real Time. 2021. Available online: https://demanda.ree.es/visiona/peninsula/demanda/ (accessed on 1 August 2021).
- Chen, C.; Liu, L.M. Joint estimation of model parameters and outlier effects in time series. J. Am. Stat. Assoc. 1993, 88, 284–297. [Google Scholar]
- Gupta, M.; Gao, J.; Aggarwal, C.C.; Han, J. Outlier detection for temporal data: A survey. IEEE Trans. Knowl. Data Eng. 2013, 26, 2250–2267. [Google Scholar] [CrossRef]
- Tavakoli, N. Modeling Genome Data Using Bidirectional LSTM. In Proceedings of the 2019 IEEE 43rd Annual Computer Software and Applications Conference (COMPSAC), Milwaukee, WI, USA, 15–19 July 2019; Volume 2, pp. 183–188. [Google Scholar] [CrossRef]
- Staudemeyer, R.C.; Morris, E.R. Understanding LSTM—A tutorial into Long Short-Term Memory Recurrent Neural Networks. arXiv 2019, arXiv:1909.09586. [Google Scholar]
- Zhen, H.; Niu, D.; Yu, M.; Wang, K.; Liang, Y.; Xu, X. A Hybrid Deep Learning Model and Comparison for Wind Power Forecasting Considering Temporal-Spatial Feature Extraction. Sustainability 2020, 12, 9490. [Google Scholar] [CrossRef]
- Yu, L.; Qu, J.; Gao, F.; Tian, Y. A novel hierarchical algorithm for bearing fault diagnosis based on stacked LSTM. Shock Vib. 2019, 2019, 2756284. [Google Scholar] [CrossRef]
- Essein, A.; Giannetti, C. A Deep Learning Model for Smart Manufacturing Using Convolutional LSTM Neural Network Autoencoders. IEEE Trans. Ind. Inform. 2020, 16, 6069–6078. [Google Scholar] [CrossRef] [Green Version]
- O’Shea, K.; Nash, R. An Introduction to Convolutional Neural Networks. arXiv 2015, arXiv:1511.08458. [Google Scholar]
- Liu, G.; Bao, H.; Han, B. A Stacked Autoencoder-Based Deep Neural Network for Achieving Gearbox Fault Diagnosis. Math. Probl. Eng. 2018, 2018, 5105709. [Google Scholar] [CrossRef] [Green Version]
- Benhmad, F.; Percebois, J. Wind power feed-in impact on electricity prices in Germany 2009–2013. Eur. J. Comp. Econ. 2016, 13, 81. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. In Proceedings of the 3rd International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Chang, Z.; Zhang, Y.; Chen, W. Effective Adam-Optimized LSTM Neural Network for Electricity Price Forecasting. In Proceedings of the 2018 IEEE 9th International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 23–25 November 2018; pp. 245–248. [Google Scholar] [CrossRef]
- Kumar Dubey, A.; Kumar, A.; García-Díaz, V.; Kumar Sharma, A.; Kanhaiya, K. Study and analysis of SARIMA and LSTM in forecasting time series data. Sustain. Energy Technol. Assess. 2021, 47, 101474. [Google Scholar] [CrossRef]
- Nhu, V.H.; Hoang, N.D.; Nguyen, H.; Ngo, P.T.T.; Bui, T.T.; Hoa, P.V.; Samui, P.; Bui, D.T. Effectiveness assessment of Keras based deep learning with different robust optimization algorithms for shallow landslide susceptibility mapping at tropical area. Catena 2020, 188, 104458. [Google Scholar] [CrossRef]
- Chen, S.; Yang, J.; Liu, Y.; Tang, K.; Song, P. Evaluation and Improvement of Power Forecasting Indicators for Renewable Energy Stations. In Proceedings of the 2019 IEEE 3rd International Electrical and Energy Conference (CIEEC), Beijing, China, 7–9 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1164–1169. [Google Scholar]
- Elsaraiti, M.; Merabet, A.; Al-Durra, A. Time Series Analysis and Forecasting of Wind Speed Data. In Proceedings of the 2019 IEEE Industry Applications Society Annual Meeting, Baltimore, MD, USA, 29 September–3 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Prema, V.; Sarkar, S.; Rao, K.U.; Umesh, A. LSTM based Deep Learning model for accurate wind speed prediction. Data Sci. Mach. Learn. 2019, 1, 6–11. [Google Scholar]
- Chhay, L.; Reyad, M.A.H.; Suy, R.; Islam, M.R.; Mian, M.M. Municipal solid waste generation in China: Influencing factor analysis and multi-model forecasting. J. Mater. Cycles Waste Manag. 2018, 20, 1761–1770. [Google Scholar] [CrossRef]
- Jalali, M.F.M.; Heidari, H. Predicting changes in Bitcoin price using grey system theory. Financ. Innov. 2020, 6, 1–12. [Google Scholar]
- Rodriguez, M.A.; Sotomonte, J.F.; Cifuentes, J.; Bueno-López, M. Power Quality Disturbance Classification via Deep Convolutional Auto-Encoders and Stacked LSTM Recurrent Neural Networks. In Proceedings of the 2020 International Conference on Smart Energy Systems and Technologies (SEST), Virtual, 7–9 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Wang, P.; Rowe, J.P.; Min, W.; Mott, B.W.; Lester, J.C. Interactive Narrative Personalization with Deep Reinforcement Learning. In Proceedings of the International Joint Conference on Artificial Intelligence, IJCAI, Melbourne, Australia, 19–25 August 2017; pp. 3852–3858. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Sequence Size | Epochs | Batch Size | Neurons |
|---|---|---|---|
| Weekly (168 steps) | 100 | 12 | 32 |
| Monthly (720 steps) | 200 | 24 | 64 |
| Quarterly (2160 steps) | 300 | 46, 48 | 128 |
| Input Sequence Size | Epochs | Batch Size | Neurons (Layer 1) | Neurons (Layer 2) |
|---|---|---|---|---|
| Weekly (168 steps) | 100 | 12 | 32 | 32 |
| Monthly (720 steps) | 200 | 24 | 64 | 64 |
| Quarterly (2160 steps) | 300 | 46, 48 |
| Model | Input Time Steps | Min MAPE (%) | Max MAPE (%) | Mean MAPE (%) | Implementation Time hh:mm:ss | Optimum Configuration by Lowest MAPE (%) |
|---|---|---|---|---|---|---|
| Vanilla LSTM | Weekly (168) | 4.30 | 5.38 | 4.75 | 05:50:03 | Time steps: 168 |
| Monthly (720) | 4.61 | 8.49 | 5.93 | 06:43:03 | Neurons: 32 | |
| Quarterly (2160) | 4.84 | 12.21 | 6.56 | 11:09:53 | Epochs: 200 | |
| Batch Size: 46 | ||||||
| Bidirectional LSTM | Weekly (168) | 4.44 | 5.53 | 4.85 | 08:04:21 | Time steps: 168 |
| Monthly (720) | 4.59 | 8.91 | 6.19 | 13:18:53 | Neurons: 32 | |
| Quarterly (2160) | 4.79 | 7.04 | 5.62 | 18:50:08 | Epochs: 200 | |
| Batch Size: 46 | ||||||
| Stacked LSTM | Weekly (168) | 4.37 | 5.13 | 4.71 | 06:25:27 | Time steps: 168 |
| Monthly (720) | 4.68 | 8.99 | 6.18 | 09:07:01 | Neurons per layer: 32, 32 | |
| Quarterly (2160) | 4.73 | 14.13 | 7.22 | 16:23:17 | Epochs: 300 | |
| Batch Size: 12 | ||||||
| Convolutional LSTM | Weekly (168) | 5.45 | 10.15 | 7.49 | 21:47:49 | Time steps: 720 |
| Monthly (720) | 5.31 | 7.31 | 6.60 | 27:19:05 | Neurons: 128 | |
| Quarterly (2160) | 5.87 | 6.81 | 6.60 | 57:39:11 | Epochs: 100 | |
| Batch Size: 12 |
| Model | Forecasted Steps | MAPE (%) | RMSE (MWh) | MAE (MWh) | (%) | Implementation Time hh:mm:ss | Model Configuration |
|---|---|---|---|---|---|---|---|
| Vanilla LSTM | 1 | 4.47 | 269.64 | 200.49 | 99.41 | 02:42:46 | Time steps: 168 |
| 2 | 9.04 | 512.83 | 375.89 | 97.74 | Neurons: 32 | ||
| 3 | 13.61 | 745.22 | 551.67 | 95.25 | Epochs: 200, Batch Size: 46 | ||
| Stacked LSTM | 1 | 4.17 | 259.76 | 188.01 | 99.40 | 19:24:30 | Time steps: 168 |
| 2 | 8.98 | 514.61 | 382.79 | 97.68 | Neurons—Layer 1 and 2: 32, 32 | ||
| 3 | 13.86 | 749.57 | 566.29 | 95.13 | Epochs: 300, Batch Size: 12 | ||
| Bidirectional LSTM | 1 | 4.50 | 267.95 | 197.26 | 99.40 | 03:44:40 | Time steps: 168 |
| 2 | 8.76 | 510.28 | 378.83 | 97.68 | Neurons: 32 | ||
| 3 | 13.27 | 741.82 | 558.82 | 95.11 | Epochs: 200, Batch Size: 46 | ||
| Autoencoder LSTM | 1 | 4.52 | 289.27 | 211.41 | 99.35 | 41:54:38 | Time steps: 2160 |
| 2 | 8.91 | 554.97 | 412.58 | 97.47 | Neurons: 32 | ||
| 3 | 13.46 | 807.43 | 605.94 | 94.57 | Epochs: 100, Batch Size: 12 | ||
| Convolutional LSTM | 1 | 8.24 | 463.22 | 342.99 | 98.13 | 03:53:02 | Time steps: 720 |
| 2 | 12.72 | 718.48 | 555.27 | 95.24 | Neurons: 128 | ||
| 3 | 17.21 | 962.18 | 757.90 | 91.29 | Epochs: 100, Batch Size: 12 | ||
| MARS | 1 | 6.77 | 373.64 | 284.29 | 98.75 | 00:00:10 | |
| 2 | 12.98 | 685.52 | 526.94 | 95.81 | |||
| 3 | 18.82 | 953.36 | 737.91 | 91.89 | |||
| M5TREE | 1 | 6.71 | 373.94 | 284.04 | 98.76 | 00:00:07 | |
| 2 | 12.66 | 686.66 | 526.09 | 95.81 | |||
| 3 | 18.04 | 956.06 | 736.28 | 91.89 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mora, E.; Cifuentes, J.; Marulanda, G. Short-Term Forecasting of Wind Energy: A Comparison of Deep Learning Frameworks. Energies 2021, 14, 7943. https://doi.org/10.3390/en14237943
Mora E, Cifuentes J, Marulanda G. Short-Term Forecasting of Wind Energy: A Comparison of Deep Learning Frameworks. Energies. 2021; 14(23):7943. https://doi.org/10.3390/en14237943
Chicago/Turabian StyleMora, Elianne, Jenny Cifuentes, and Geovanny Marulanda. 2021. "Short-Term Forecasting of Wind Energy: A Comparison of Deep Learning Frameworks" Energies 14, no. 23: 7943. https://doi.org/10.3390/en14237943
APA StyleMora, E., Cifuentes, J., & Marulanda, G. (2021). Short-Term Forecasting of Wind Energy: A Comparison of Deep Learning Frameworks. Energies, 14(23), 7943. https://doi.org/10.3390/en14237943