
Thermal Analysis of Herringbone Gears Based on Thermal Elastohydrodynamic Lubrication Considering Surface Roughness

Abstract
:1. Introduction
2. Mathematical Methods
2.1. Meshing Parameter Analysis
2.2. Governing Equations
2.2.1. Reynolds Equation
2.2.2. Film Thickness Equation
2.2.3. Lubricant Viscosity–Pressure and Density–Pressure Equations
2.2.4. Load Balance Equation
2.2.5. Energy Equation
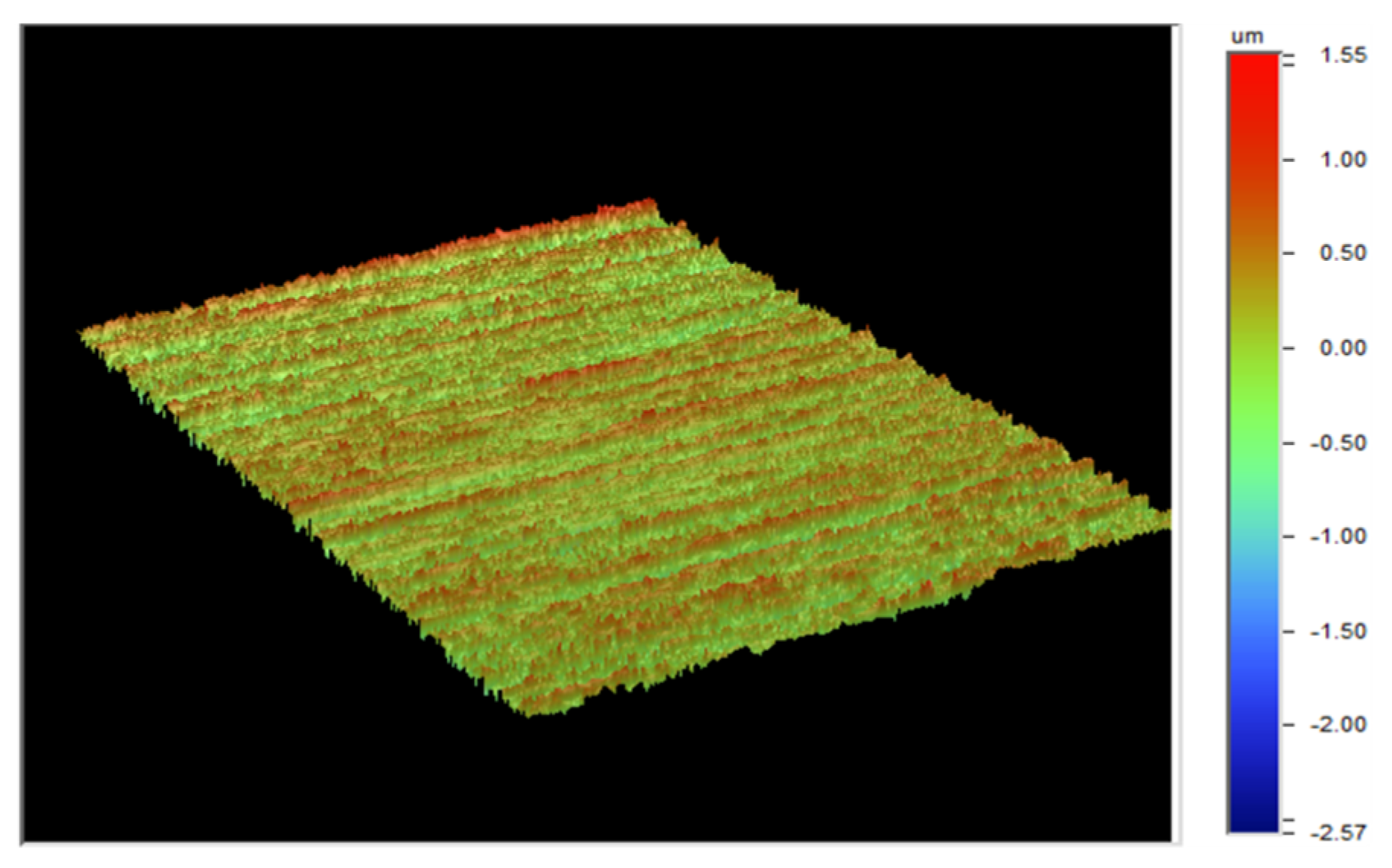
2.3. Measurement of Real Tooth Surface Topography
2.4. Method of the Temperature Field Solution
3. Numerical Solution
3.1. Validation of the Numerical Model
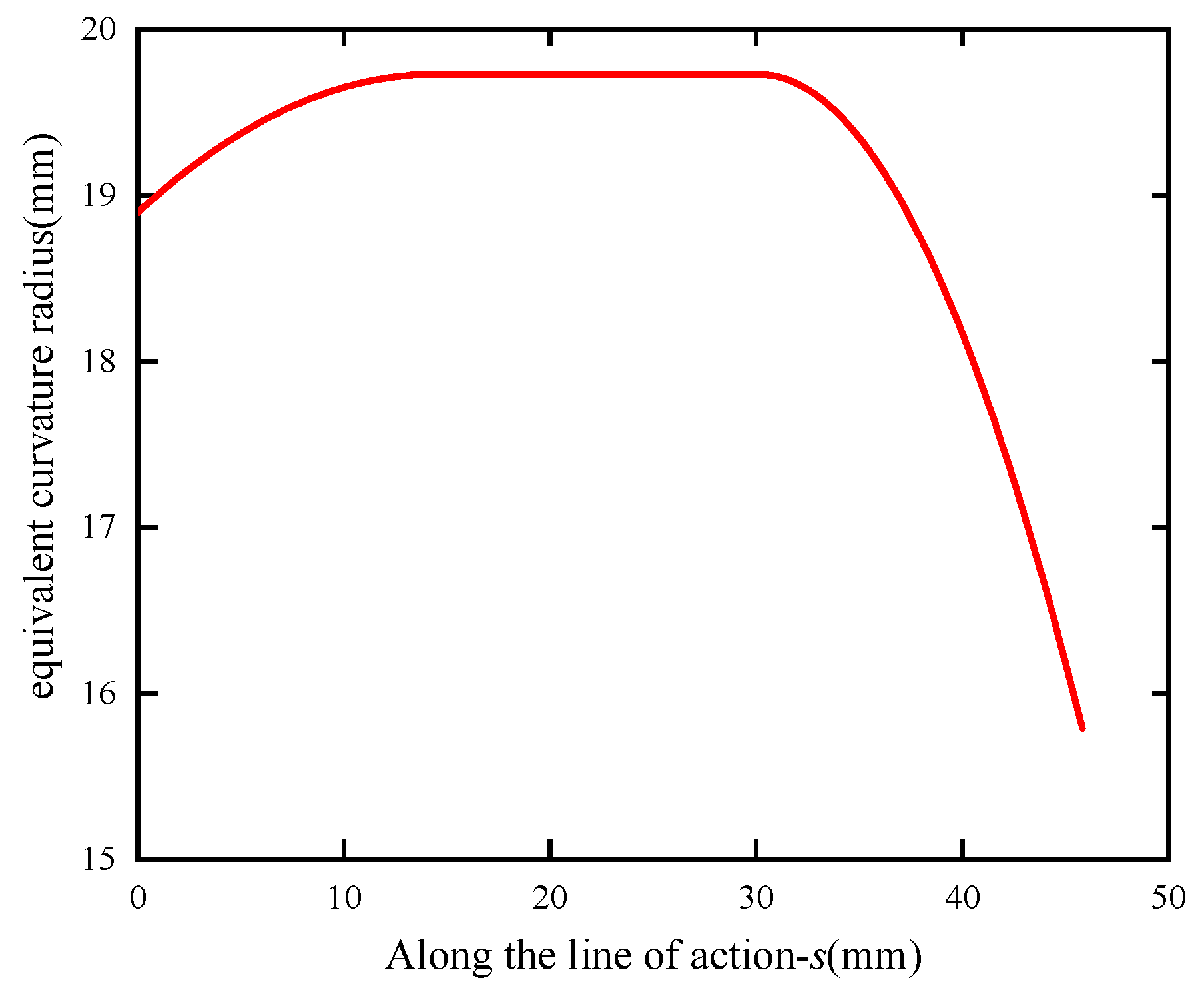
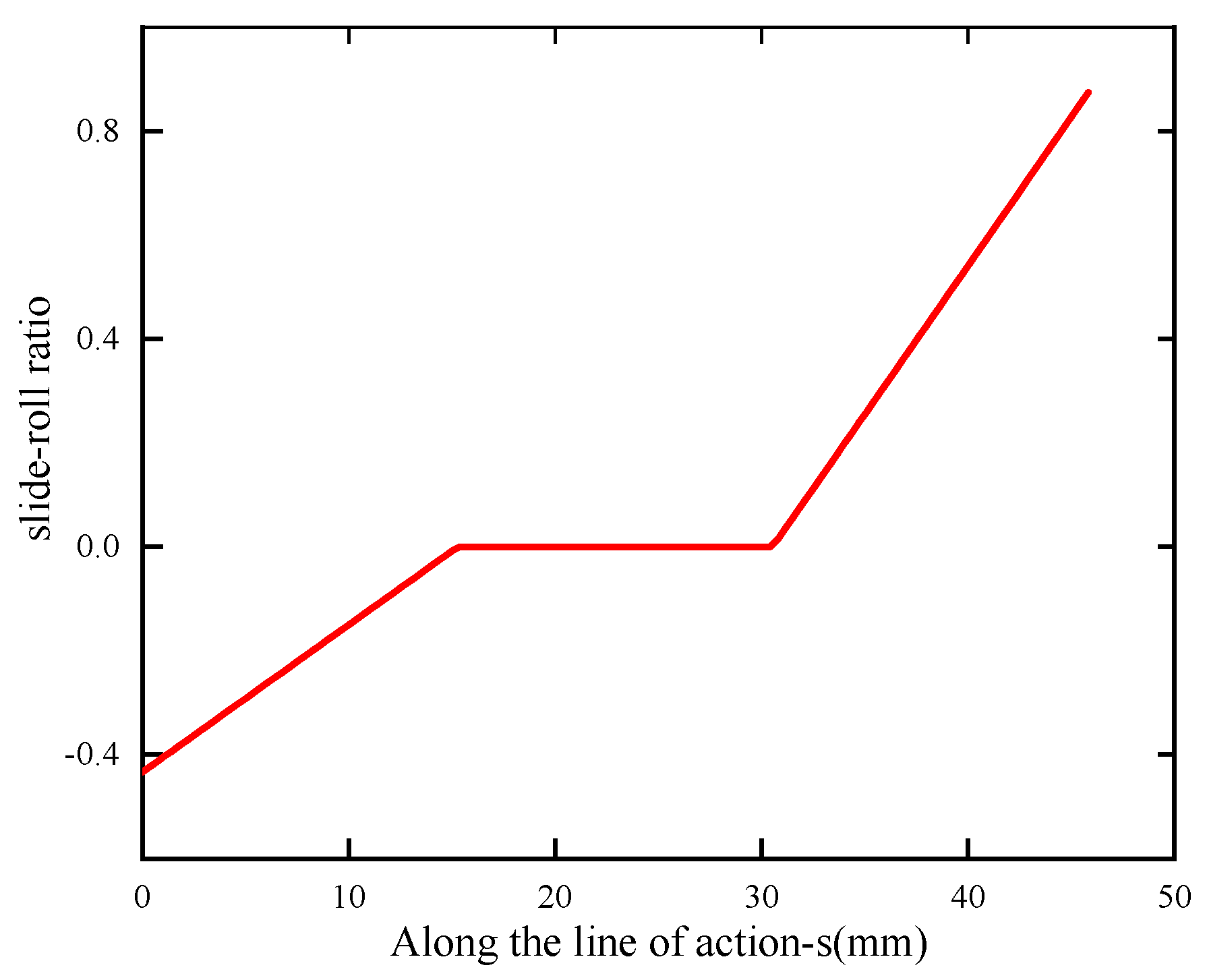
3.2. Meshing Parameters Solution
3.3. Analysis of Heat Generation and Heat Dissipation
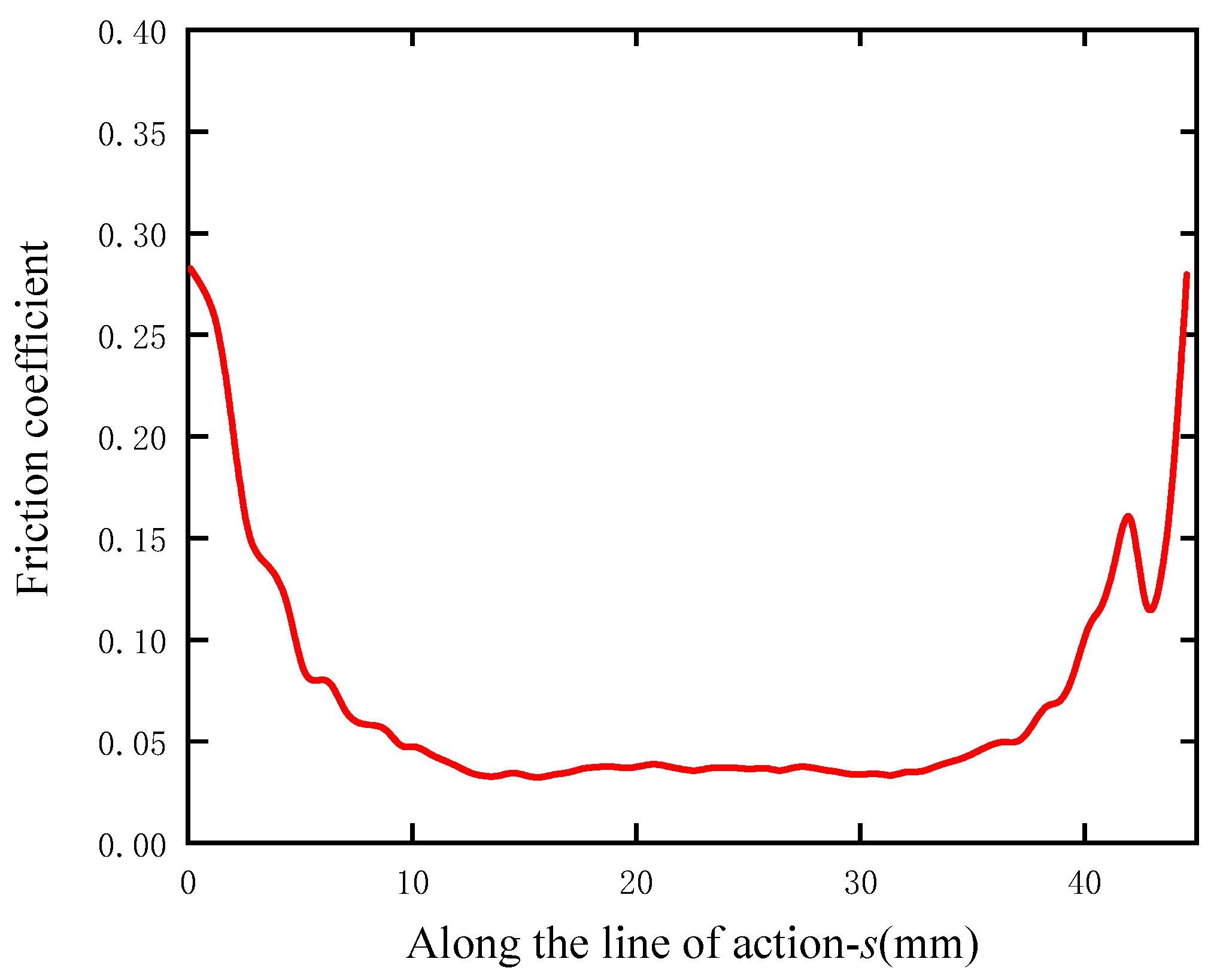
3.3.1. Calculation Method of Friction Coefficient
3.3.2. Frictional Heat Flux
3.4. Effect of Different Parameters on Frictional Heat Flux
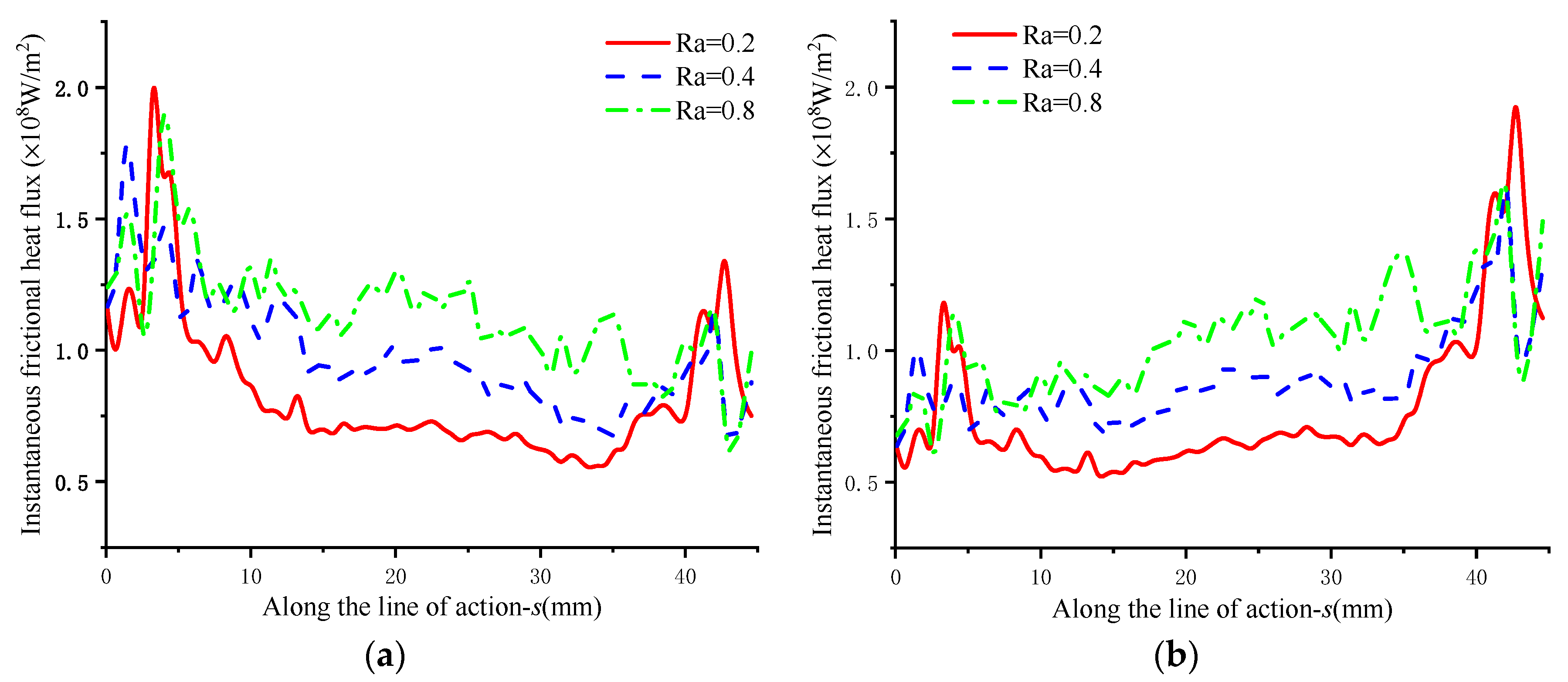
3.4.1. Influence of Roughness
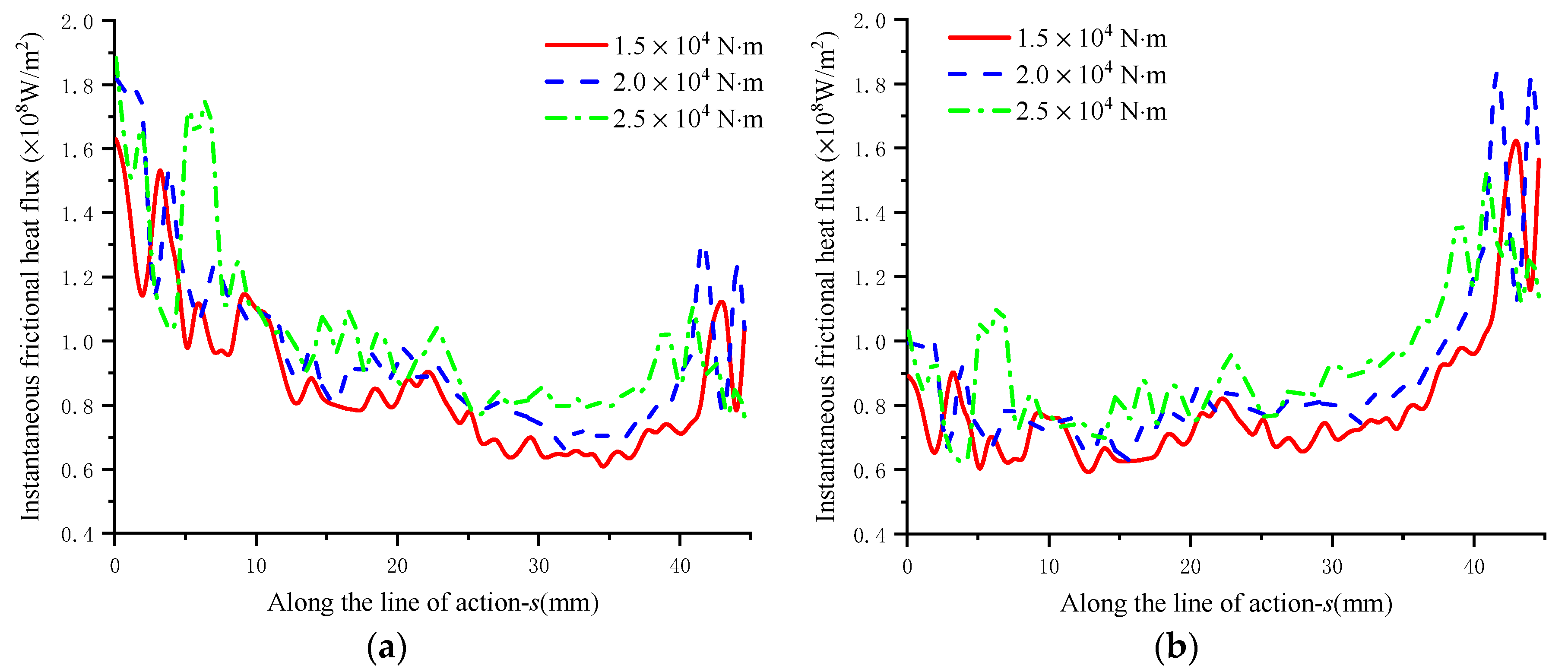
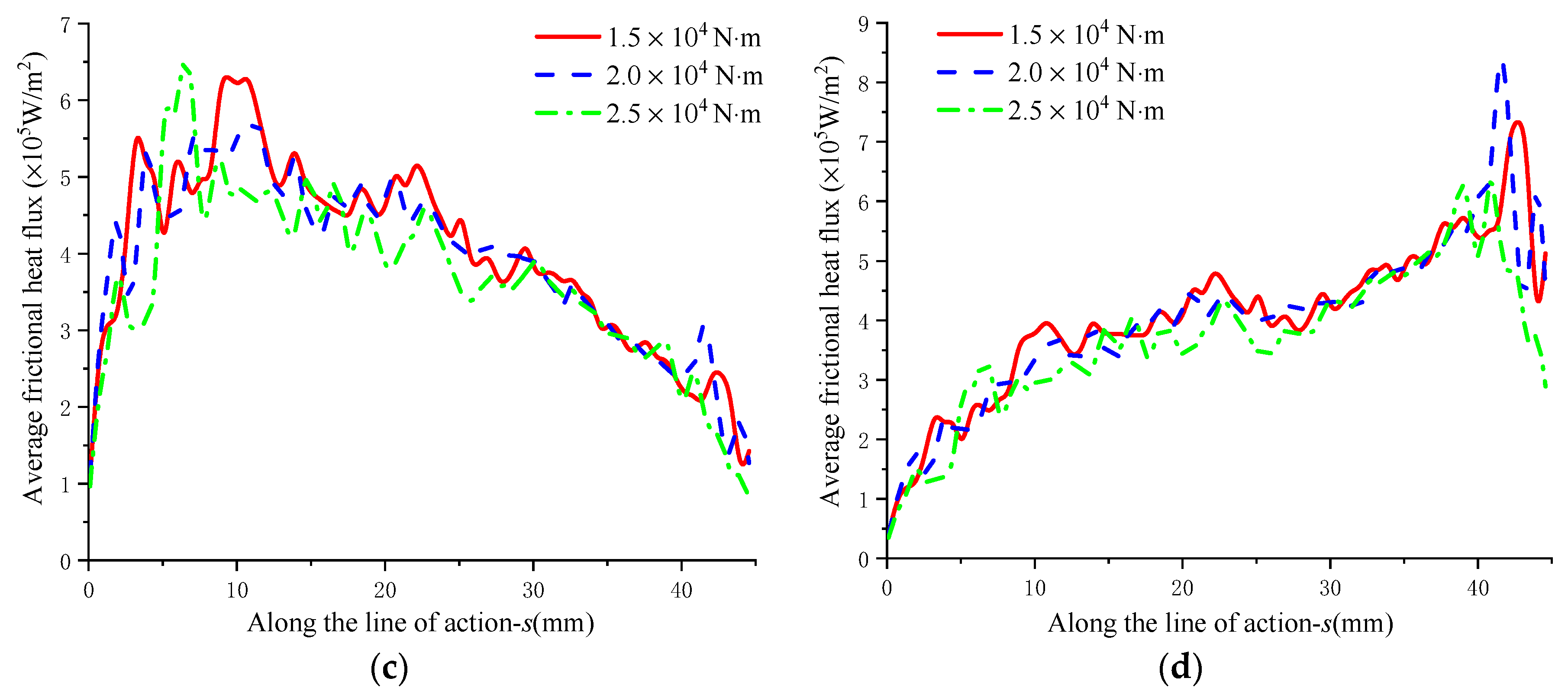
3.4.2. Influence of Torque
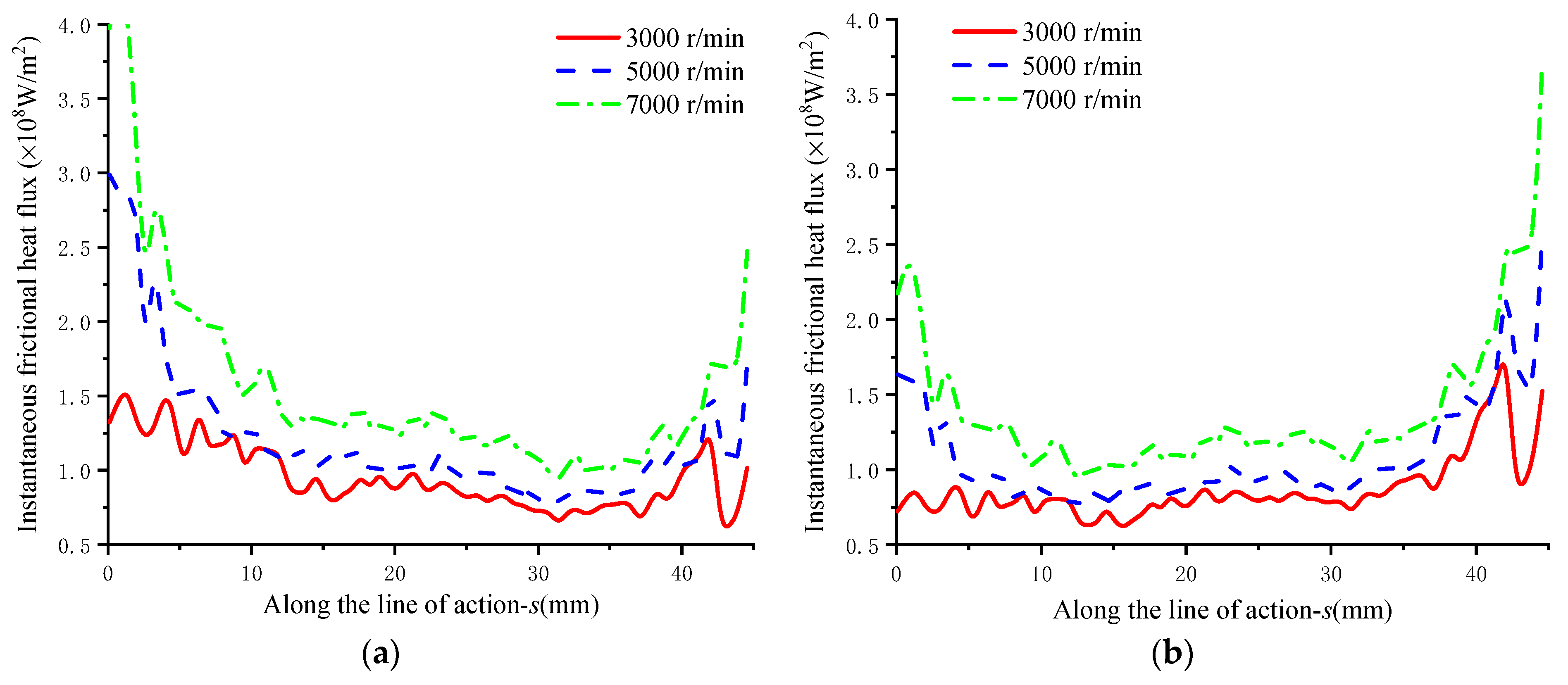
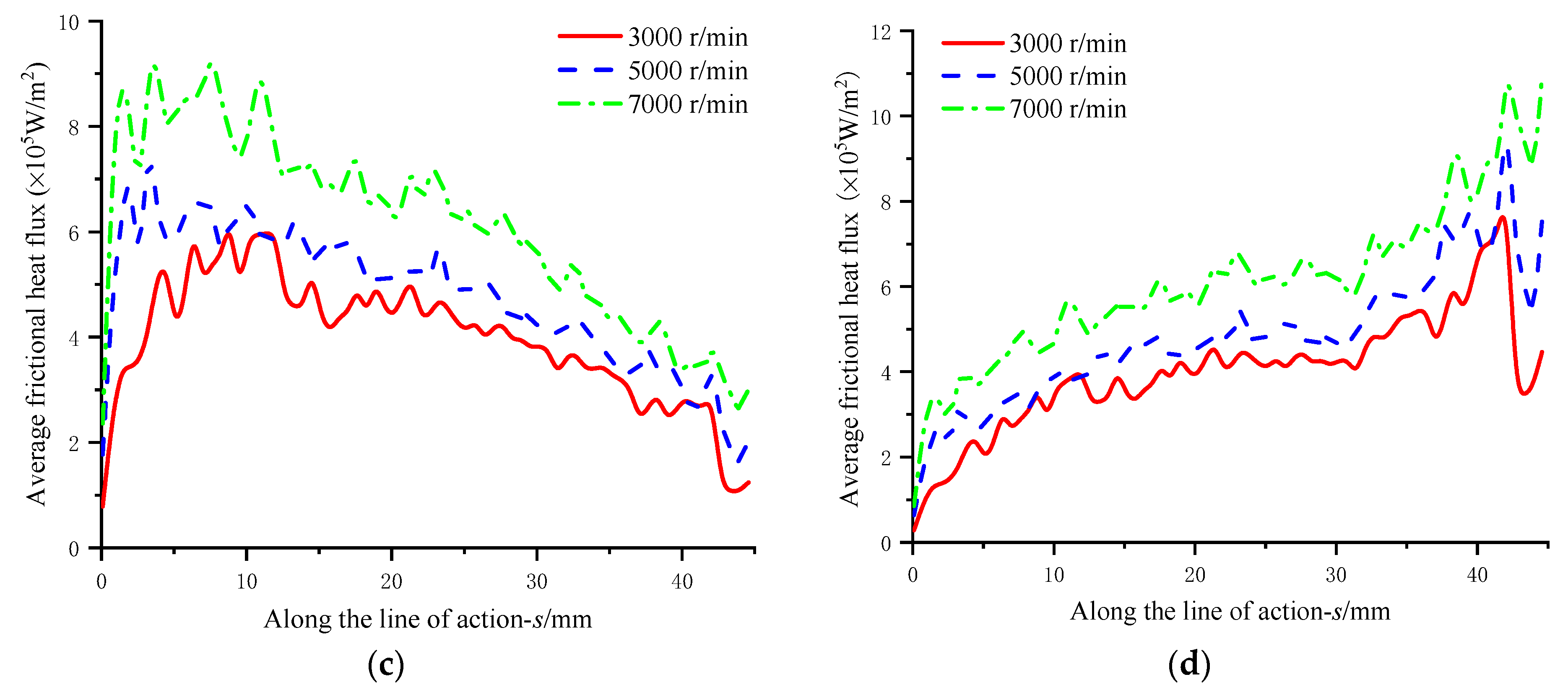
3.4.3. Influence of Rotating Speed
3.5. Evaluation for the Convection Heat Transfer Coefficient
3.5.1. End Surface
3.5.2. Meshing Surface
3.5.3. Other Surfaces
3.6. Analysis of Herringbone Gears Temperature Field
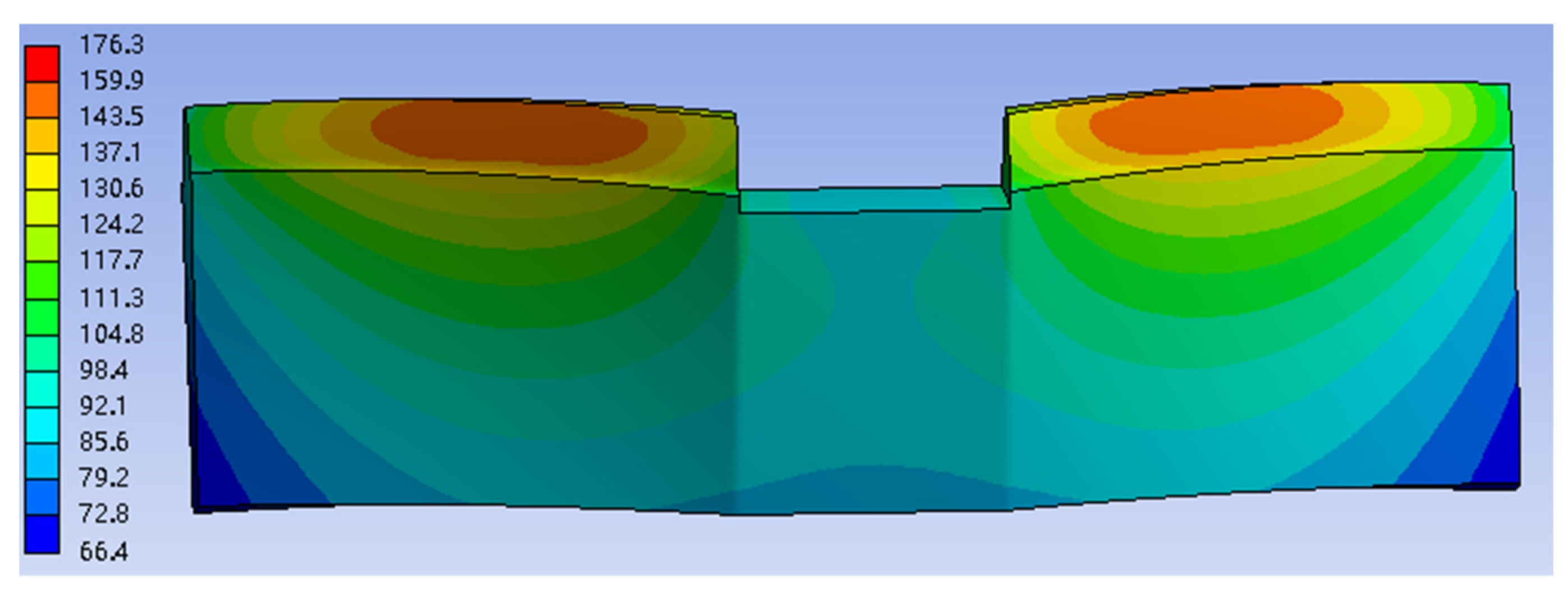
3.6.1. Simulation of the Steady Temperature Field
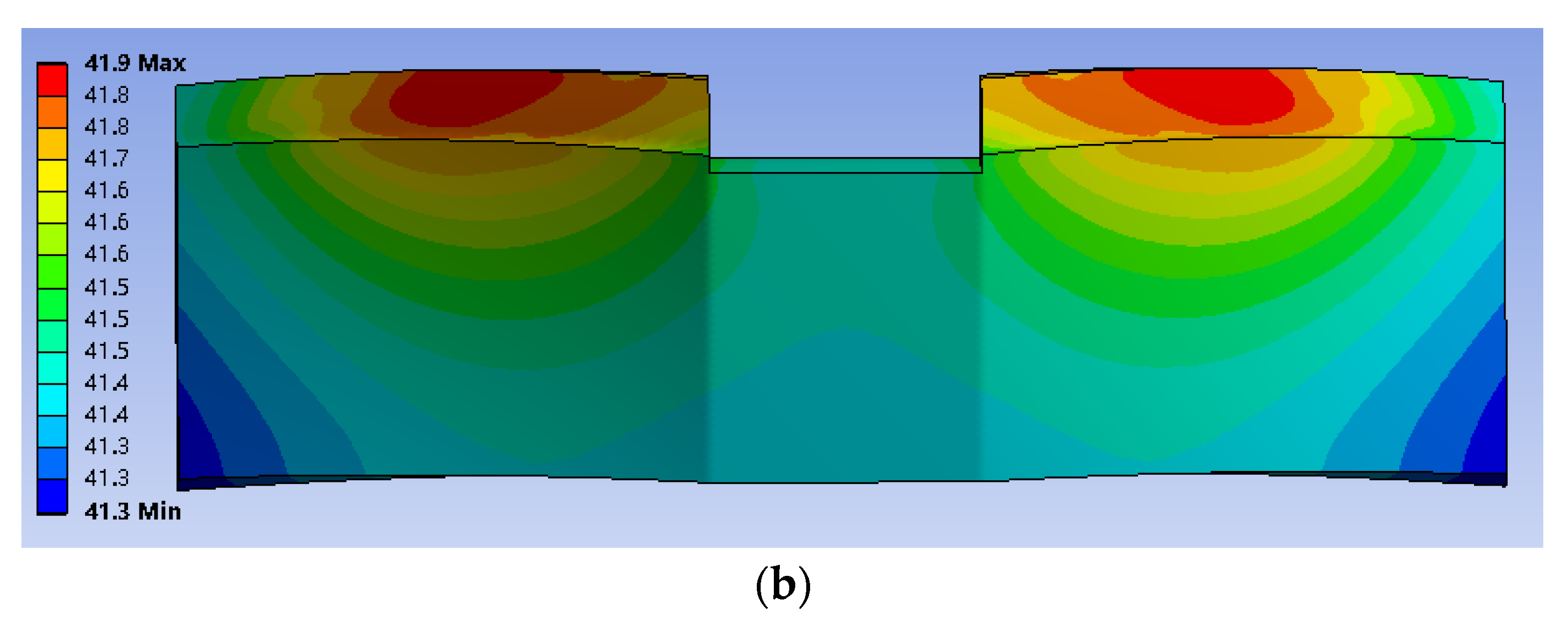
3.6.2. Simulation of the Transient Temperature Field
4. Test Verification
5. Conclusions
- (1)
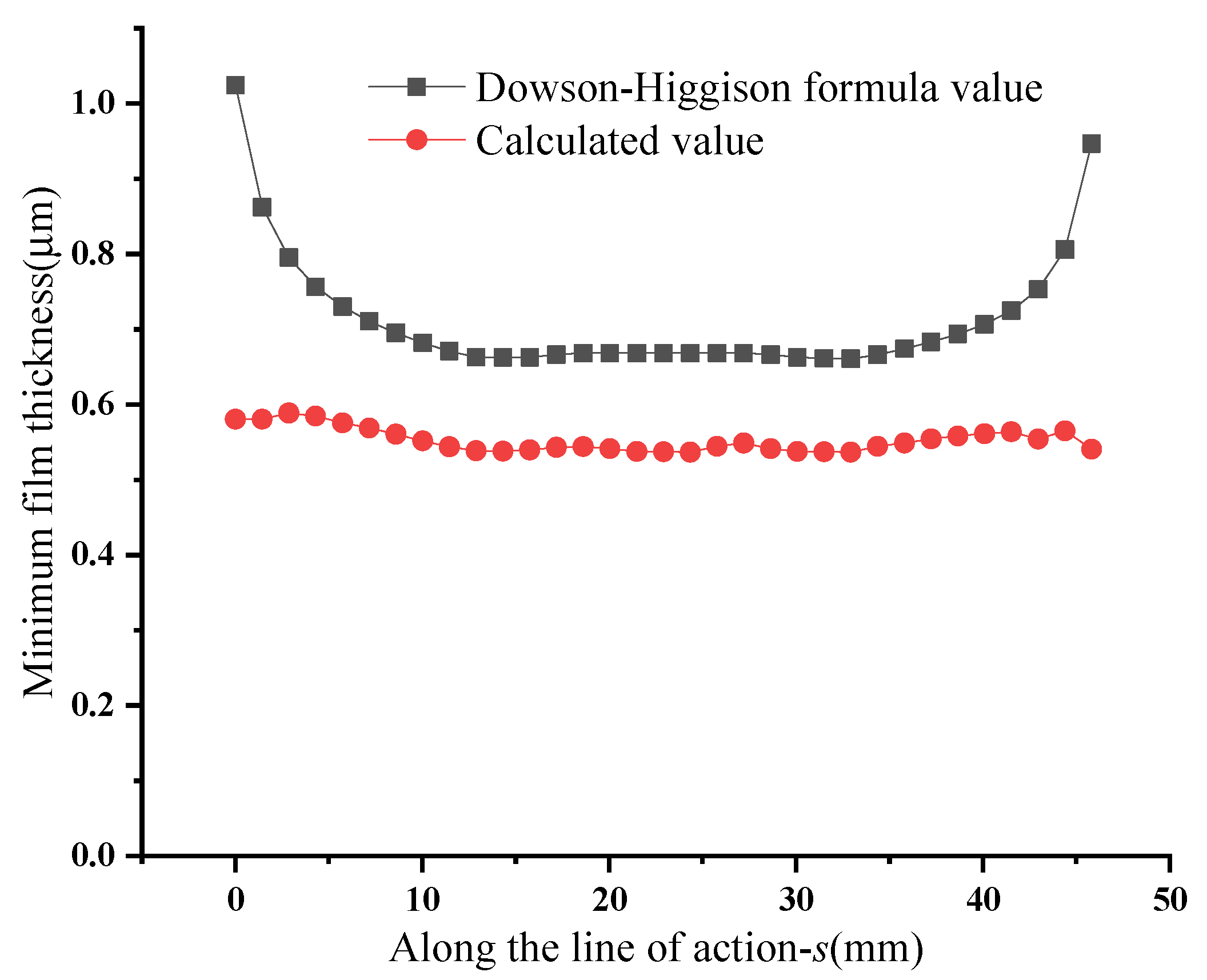
- The TEHL effect of herringbone gears with a rough face was studied. The TEHL model of herringbone gears was established, and the lubrication state of meshing point was obtained by iterative calculation. The comparison of the film thickness numerical results between the calculated value and Dowson–Higginson empirical formula value demonstrated that the correctness of the TEHL model was verified.
- (2)
- The influence of different parameters on the distribution of frictional heat flux was analyzed. The results show that under the conditions of mixed TEHL and smoother tooth surface, lower speed and torque, the frictional heat flux significantly changes with the meshing point, which favors the reduction in the frictional heat flux.
- (3)
- The temperature distribution was obtained and it approximately presents an elliptical distribution along the tooth width. In addition, the highest temperature of the gear tooth occurred near the inner-end surface.
- (4)
- The simulation and the experimental results demonstrated good agreement which verified the feasibility of the present numerical method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| pitch diameter (i = 1 for the driving pinion, i = 2 for the driven gear), mm | |
| pressure angle, deg | |
| curvature radius (i = 1 for the driving pinion, i = 2 for the driven gear), mm | |
| equivalent curvature radius, mm | |
| tangential velocity (i = 1 for the driving pinion, i = 2 for the driven gear), m/s | |
| entrainment velocity, m/s | |
| sliding velocity, m/s | |
| sliding–rolling ratio | |
| rotating speed (i = 1 for the driving pinion, i = 2 for the driven gear), r/min | |
| specific heat capacity (i = f for the lubricant, i = 1 for the driving pinion, i = 2 for the driven gear), | |
| normal modulus, mm | |
| viscosity–pressure coefficient | |
| density of gears (i = 1 for the driving pinion, i = 2 for the driven gear), | |
| Reynolds number of the fluid | |
| periods of gears (j = 1 for the driving pinion, j = 2 for the driven gear), s | |
| oil film pressure, Pa | |
| oil film thickness, | |
| viscosity of lubricant, Pa/s | |
| density of lubricant, | |
| rigid central film thickness, | |
| ambient viscosity of lubricant, Pa/s | |
| ambient density of lubricant, | |
| comprehensive Young’s modulus, Pa | |
| torque (i = in for the input torque, i = out for the output torque), n/m | |
| thermal conductivity, (i = f for the lubricant, i = 1 for the driving pinion, i = 2 for the driven gear), W | |
| average contact pressure, Pa | |
| kinematic viscosity of the fluid, | |
| Prandtl number of the fluid | |
| Hertz contact half-width, mm | |
| angular velocity of the gear, rad/s |
References
- Liu, M.; Zhu, C.; Liu, H.; Wu, C. Parametric studies of lubrication performance of a helical gear pair with non-Newtonian fluids. J. Mech. Sci. Technol. 2016, 30, 317–326. [Google Scholar] [CrossRef]
- Zhou, C.; Pan, L.; Xu, J.; Han, X. Non-Newtonian thermal elastohydrodynamic lubrication in point contact for a crowned herringbone gear drive. Tribol. Int. 2017, 116, 470–481. [Google Scholar] [CrossRef]
- Xiao, Z.; Shi, X. Investigation on stiffness and damping of transient non-Newtonian thermal elastohydrodynamic point contact for crowned herringbone gears. Tribol. Int. 2019, 137, 102–112. [Google Scholar] [CrossRef]
- Jian, G.-X.; Wang, Y.-Q.; Zhang, P.; Li, Y.-K.; Luo, H. Thermal elastohydrodynamic lubrication of modified gear system considering vibration. J. Cent. S. Univ. 2020, 27, 3350–3363. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Xu, Z.C.; Ma, T.; Zhang, Y.P.; Song, G.H.; Hao, H.H. Analysis of Lubrication and Friction Characteristics for Modified Herringbone Gear. J. S. China Univ. Technol. Nat. Sci. 2021, 49, 93–102. [Google Scholar] [CrossRef]
- Serest, A.E.; Akbarzadeh, S. Mixed-elastohydrodynamic analysis of helical gears using load-sharing concept. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2014, 228, 320–331. [Google Scholar] [CrossRef]
- Huang, K.; Xiong, Y.; Wang, T.; Chen, Q. Research on the dynamic response of high-contact-ratio spur gears influenced by surface roughness under EHL condition. Appl. Surf. Sci. 2017, 392, 8–18. [Google Scholar] [CrossRef]
- Yang, Y.; Li, W.; Wang, J.; Zhou, Q. On the mixed EHL characteristics, friction and flash temperature in helical gears with consideration of 3D surface roughness. Ind. Lubr. Tribol. 2019, 71, 10–21. [Google Scholar] [CrossRef]
- Cao, W. Influence of surface roughness on the mixed elastohydrodynamic lubrication performance of vehicle gears contact area. J. Phys. Conf. Ser. 2020, 1629. [Google Scholar] [CrossRef]
- Luo, B.; Li, W. Influence factors on bulk temperature field of gear. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2016, 231, 953–964. [Google Scholar] [CrossRef]
- Wang, C.; Ken, M. A calculation method of sliding friction coefficient on tooth surface for helical gear pair based on loaded tooth contact analysis and elastohydrodynamic lubrication theory. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2021, 235, 1551–1560. [Google Scholar] [CrossRef]
- Zhang, J.-G.; Liu, S.-J.; Fang, T. On the prediction of friction coefficient and wear in spiral bevel gears with mixed TEHL. Tribol. Int. 2017, 115, 535–545. [Google Scholar] [CrossRef]
- Zhou, C.; Hu, B.; Qian, X.; Han, X. A novel prediction method for gear friction coefficients based on a computational inverse technique. Tribol. Int. 2018, 127, 200–208. [Google Scholar] [CrossRef]
- Wang, Y.; Tang, W.; Chen, Y.; Wang, T.; Li, G.; Ball, A.D. Investigation into the meshing friction heat generation and transient thermal characteristics of spiral bevel gears. Appl. Therm. Eng. 2017, 119, 245–253. [Google Scholar] [CrossRef]
- Fernandes, C.M.; Rocha, D.M.; Martins, R.C.; Magalhães, L.; Seabra, J.H. Finite element method model to predict bulk and flash temperatures on polymer gears. Tribol. Int. 2018, 120, 255–268. [Google Scholar] [CrossRef]
- Qiao, S.; Zhou, J.; Zhang, X.; Jiang, H.; Shao, Y.; Shen, Y.; Wang, C. Dynamic Thermal Behavior of Two-Stage Gear Transmission System. J. Vib. Eng. Technol. 2021, 2021, 1–23. [Google Scholar] [CrossRef]
- Wang, Y.; Niu, W.; Chen, Y.; Song, G.; Tang, W. Convection heat transfer and temperature analysis of oil jet lubricated spur gears. Ind. Lubr. Tribol. 2016, 68, 624–631. [Google Scholar] [CrossRef]
- Gan, L.; Xiao, K.; Wang, J.; Pu, W.; Cao, W. A numerical method to investigate the temperature behavior of spiral bevel gears under mixed lubrication condition. Appl. Therm. Eng. 2019, 147, 866–875. [Google Scholar] [CrossRef]
- Li, W.; Zhai, P.; Ding, L. Analysis of Thermal Characteristic of Spur/Helical Gear Transmission. J. Therm. Sci. Eng. Appl. 2018, 11, 021003. [Google Scholar] [CrossRef]
- Lu, F.; Wang, M.; Liu, W.; Bao, H.; Zhu, R. CFD-based calculation method of convective heat transfer coefficient of spiral bevel gear in intermediate gearbox under splash lubrication. Ind. Lubr. Tribol. 2021, 73, 470–476. [Google Scholar] [CrossRef]
- Roelands, C.J.A.; Winer, W.O.; Wright, W.A. Correlational Aspects of the Viscosity-Temperature-Pressure Relationship of Lubricating Oils. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1966. [Google Scholar] [CrossRef] [Green Version]
- Dowson, D.; Higginson, G.R. Elastohydrodynamic Lubrication; Pergamon Press: New York, NY, USA, 1977. [Google Scholar]
- Zapletal, T.; Sperka, P.; Krupka, I.; Hartl, M. The effect of surface roughness on friction and film thickness in transition from EHL to mixed lubrication. Tribol. Int. 2018, 128, 356–364. [Google Scholar] [CrossRef]
- Handschuh, R.F.; Kicher, T.P. Experimental and Analytical Assessment of the Thermal Behavior of Spiral Bevel Gears. In Proceedings of the 1995 Fall Technical Meeting, Charleston, SC, USA, 16–18 October 1995; pp. 1–21. [Google Scholar] [CrossRef]
- Jie, P.; Shaojun, L.; Xiaozhou, H. The Bulk Temperature Analysis of the Involute Spur Gear Based on Parameterized Modeling of APDL. In Proceedings of the 2013 Fifth International Conference on Measuring Technology and Mechatronics Automation, IEEE, Hong Kong, China, 16–17 January 2013; pp. 1146–1149. [Google Scholar]
- Van Heijningen, G.J.J.; Blok, H. Continuous as against Intermittent Fling-Off Cooling of Gear Teeth. J. Lubr. Technol. 1974, 96, 529–538. [Google Scholar] [CrossRef]
- Huston, R.L.; Coy, J.J. Surface Geometry of Circular Cut Spiral Bevel Gears. J. Mech. Des. 1982, 104, 743–748. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter | Item | Parameter |
|---|---|---|---|
| Number of teeth | Normal pressure angle | ||
| Normal module | mm | Density of gears | |
| Face width | Specific heat capacity of gears | ||
| Poisson’s ratio | Thermal conductivity of gears | ||
| Input rotating speed | Ambient viscosity of lubricant | ||
| Input torque | Ambient density of lubricant | ||
| Young’s modulus | Thermal conductivity of lubricant |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.; Chen, J.; Wu, M.; Wang, J. Thermal Analysis of Herringbone Gears Based on Thermal Elastohydrodynamic Lubrication Considering Surface Roughness. Energies 2021, 14, 8564. https://doi.org/10.3390/en14248564
Hu X, Chen J, Wu M, Wang J. Thermal Analysis of Herringbone Gears Based on Thermal Elastohydrodynamic Lubrication Considering Surface Roughness. Energies. 2021; 14(24):8564. https://doi.org/10.3390/en14248564
Chicago/Turabian StyleHu, Xiaozhou, Jie Chen, Minggui Wu, and Jianing Wang. 2021. "Thermal Analysis of Herringbone Gears Based on Thermal Elastohydrodynamic Lubrication Considering Surface Roughness" Energies 14, no. 24: 8564. https://doi.org/10.3390/en14248564