Research on the Power Distribution Method for Hybrid Power System in the Fuel Cell Vehicle

Abstract
:1. Introduction
2. Model Framework of the Hybrid Power Sources
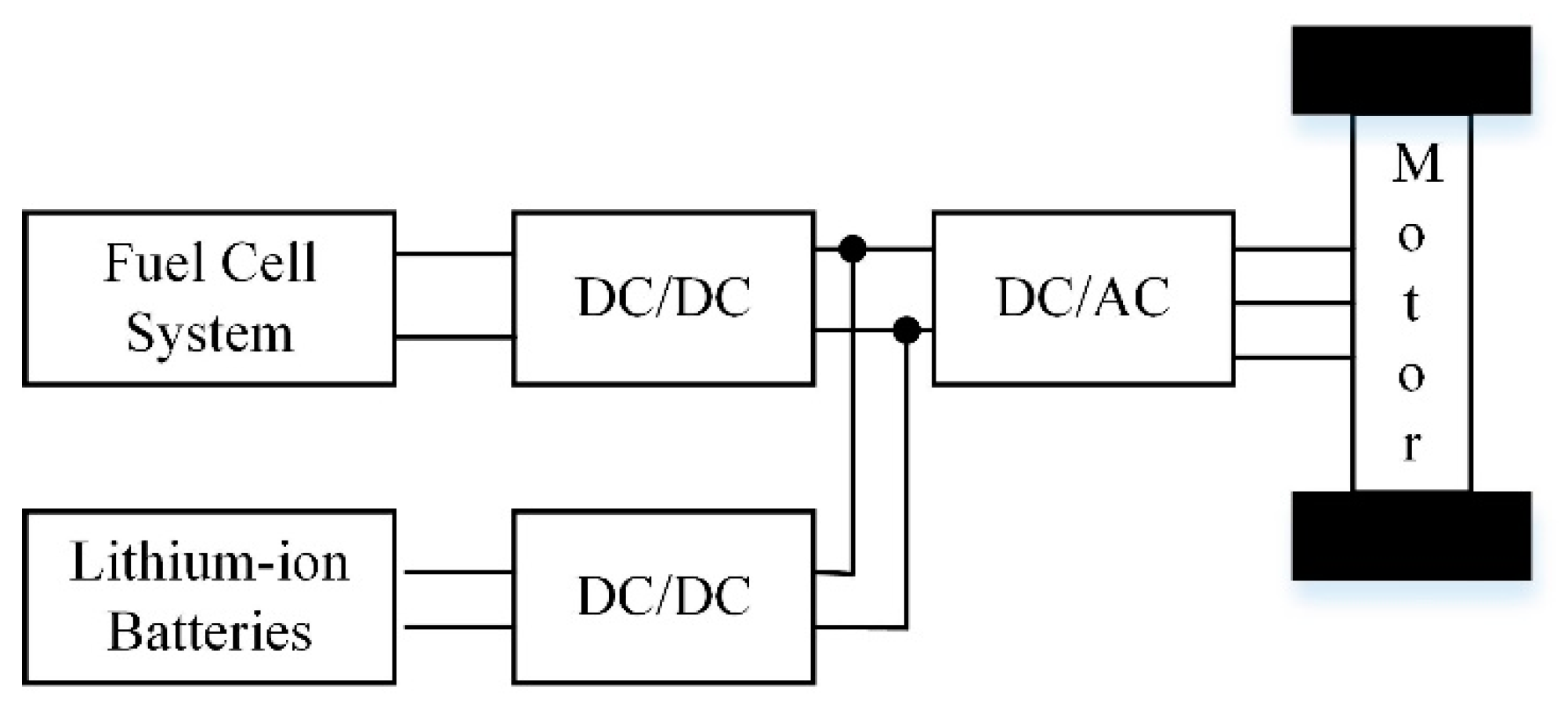
2.1. Power System Architecture
2.2. Fuel Cell Model
2.3. Lithium-Ion Battery Model
3. Analysis of Characteristics of Hybrid Power Source
3.1. Fuel Cell Characteristics Analysis
3.2. Lithium-Ion Battery Characteristics Analysis
4. Mathematical Modeling of Optimization Problems
4.1. Objective Function
4.2. Constraints
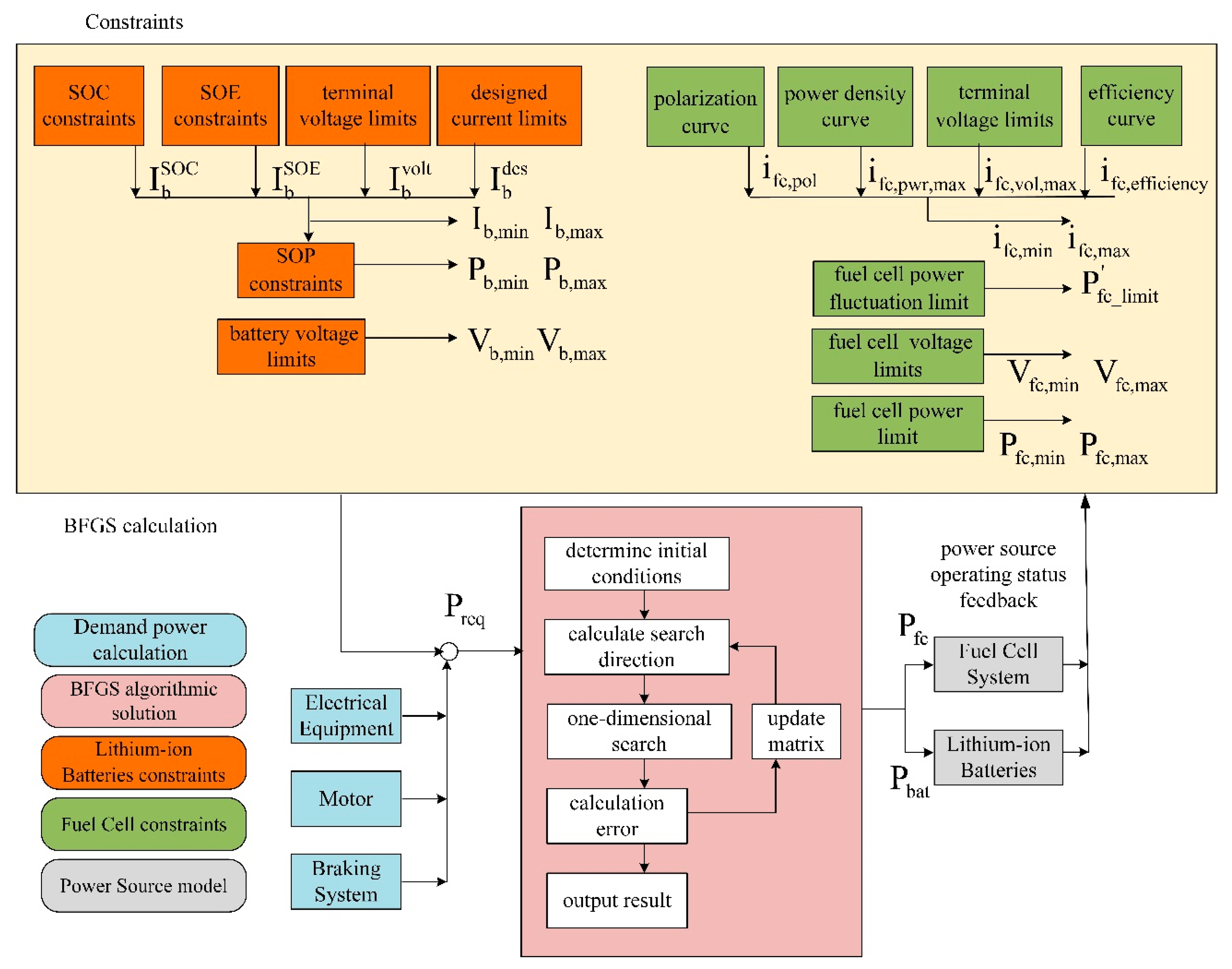
4.3. Nonlinear Programming Algorithm Calculation Process
- Determine the initial point , allowable error , and the initial value of the approximate matrix .
- Determine the search direction .
- Do a one-dimensional search along from the current point to obtain the optimal step length and update the current point .
- If , stop the iteration; otherwise, go to step 5.
- Calculate , update the approximate matrix . , and go to step 2.
- Get the demand for motor power and input to the power distribution module with the operating parameter of the power source.
- Determine the value of constraints. Some constraints are fixed, and some constraints change in real time with the state of the power sources. Real-time calculations are required for the value of constraints that change in real time. After the calculation, the feasible field of the operation point is determined.
- The nonlinear programming algorithm solves the optimization problem based on initial conditions and variable thresholds. The algorithm takes the initial point as a starting point and performs a one-dimensional search along the search direction. When the gradient difference is satisfied, the iteration is stopped and the power distribution is over.
- Fuel cell and lithium-ion battery output power based on the allocated result and feedback operating status. (Considering the calculation complexity and accuracy, this paper assumes that the optimization result is constant within the unit interval of the power distribution control strategy.)
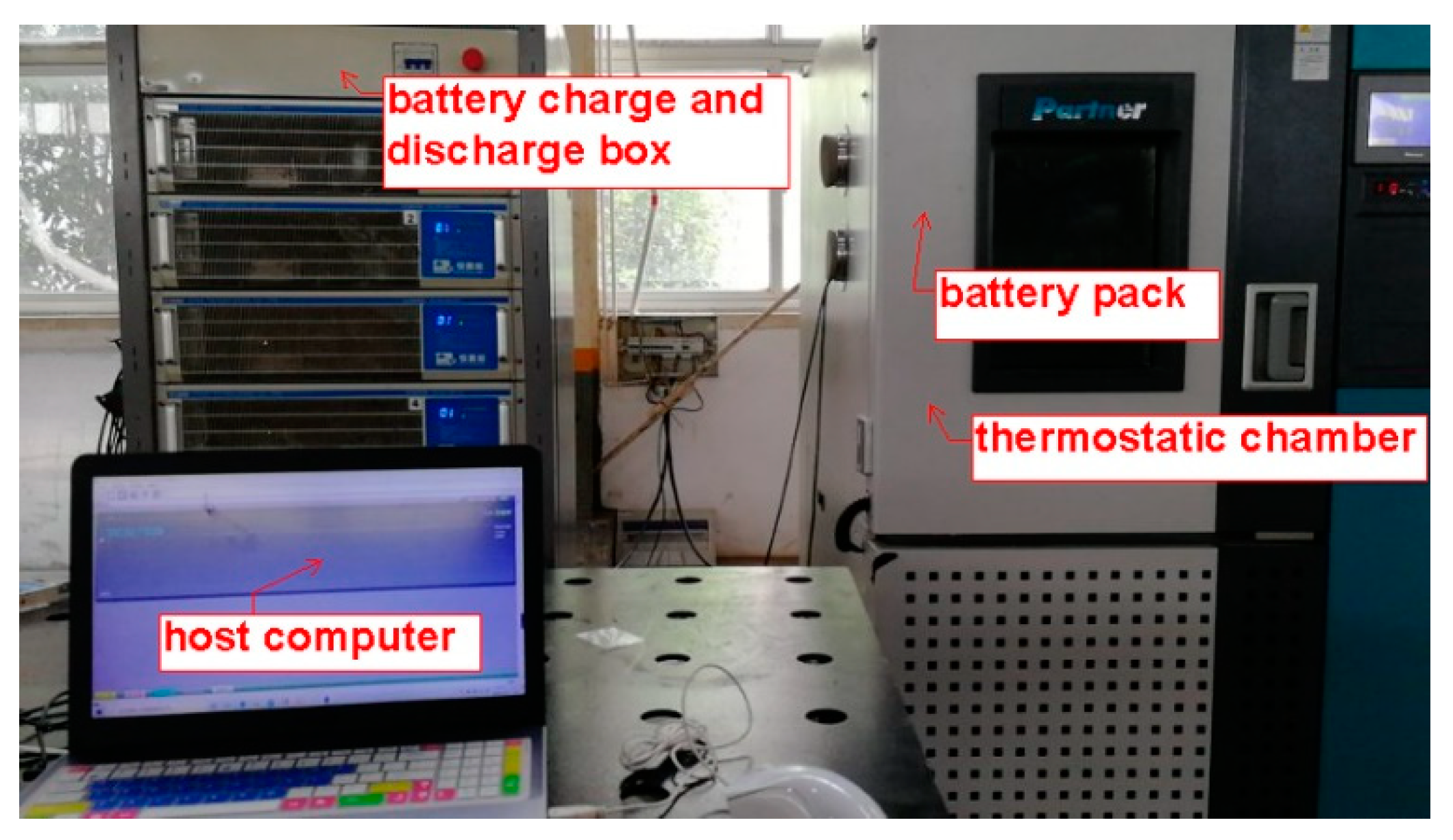
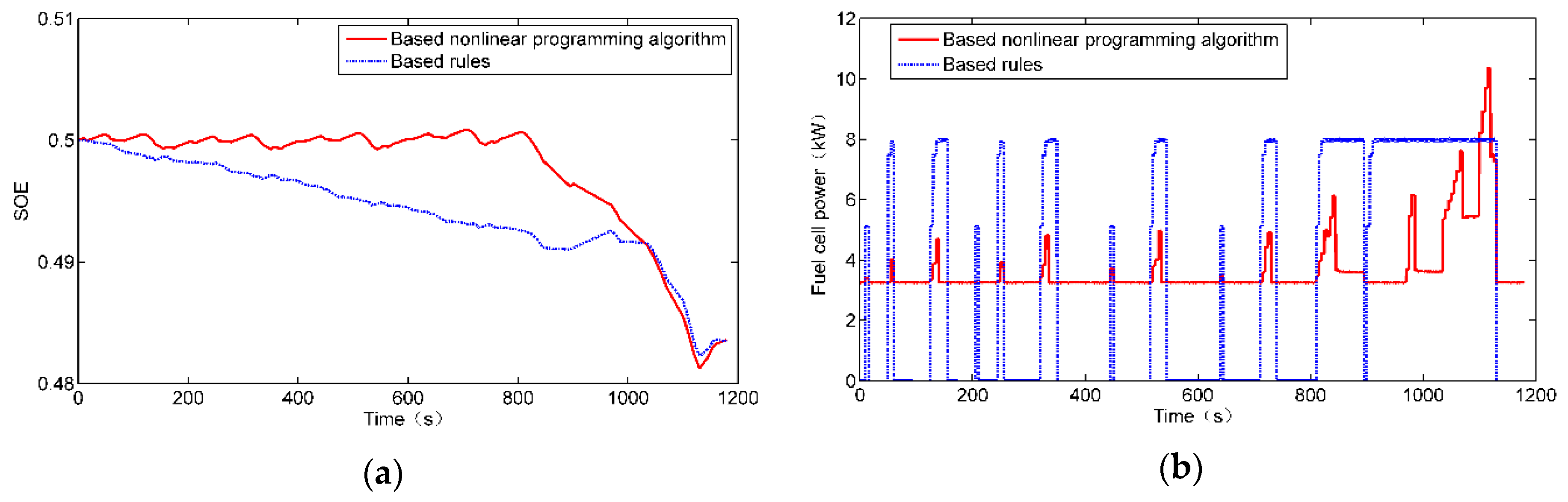
5. Simulation Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ryan, O.; Sukwon, C.; Whitney, C. Fuel cell fundamentals, 3rd edition. Mech. Eng. 2016, 9, 1–6. [Google Scholar]
- Xiong, R.; Li, L.; Tian, J. Towards a smarter battery management system: A critical review on battery state of health monitoring methods. J. Power Sources 2018, 405, 18–29. [Google Scholar] [CrossRef]
- Hannan, M.A.; Azidin, F.A.; Mohamed, A. Multi-sources model and control algorithm of an energy management system for light electric vehicles. Energy Convers. Manag. 2012, 62, 123–130. [Google Scholar] [CrossRef]
- Li, Q.; Chen, W.; Liu, Z.; Li, M.; Ma, L. Development of energy management system based on a power sharing strategy for a fuel cell-battery-supercapacitor hybrid tramway. J. Power Sources 2015, 279, 267–280. [Google Scholar] [CrossRef]
- Wang, Z.; Xie, Y.; Sun, W.; Zang, P. Modeling and Energy Management Strategy Research of Fuel Cell Bus. J. Tongji Univ. (Nat. Ence) 2019, 47, 97-103+123. [Google Scholar]
- Sockeel, N.; Shahverdi, M.; Mazzola, M.; Meadows, W. High-Fidelity Battery Model for Model Predictive Control Implemented into a Plug-In Hybrid Electric Vehicle. Batteries 2017, 3, 13. [Google Scholar] [CrossRef] [Green Version]
- Sockeel, N.; Shi, J.; Shahverdi, M.; Mazzola, M. Sensitivity Analysis of the Battery Model for Model Predictive Control: Implementable to a Plug-In Hybrid Electric Vehicle. World Electr. Veh. J. 2018, 9, 45. [Google Scholar] [CrossRef] [Green Version]
- Garcia, P.; Fernandez, L.M.; Garcia, C.A.; Jurado, F. Energy Management System of Fuel-Cell-Battery Hybrid Tramway. IEEE Trans. Ind. Electron. 2009, 57, 4013–4023. [Google Scholar] [CrossRef]
- Li, Q.; Chen, W.; Wang, Y.; Jia, J.; Han, M. Nonlinear robust control of proton exchange membrane fuel cell by state feedback exact linearization. J. Power Sources 2009, 194, 338–348. [Google Scholar] [CrossRef]
- Florescu, A.; Bacha, S.; Munteanu, I.; Bratcu, A.I. Frequency-Separation-Based Energy Management Control Strategy of Power Flows within Electric Vehicles using Ultracapacitors. In Proceedings of the Conference of the IEEE Industrial Electronics Society IEEE, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar]
- Wang, Y.; Sun, Z.; Chen, Z. Development of energy management system based on a rule-based power distribution strategy for hybrid power sources. Energy 2019, 175, 1055–1066. [Google Scholar] [CrossRef]
- Zhang, H.; Li, X.; Liu, X.; Yan, J. Enhancing fuel cell durability for fuel cell plug-in hybrid electric vehicles through strategic power management. Appl. Energy 2019, 241, 483–490. [Google Scholar] [CrossRef]
- Xiong, R.; Duan, Y.; Cao, J.; Yu, Q. Battery and ultracapacitor in-the-loop approach to validate a real-time power management method for an all-climate electric vehicle. Appl. Energy 2018, 217, 153–165. [Google Scholar] [CrossRef]
- Hong, Z.; Li, Q.; Han, Y.; Shang, W.; Zhu, Y.; Chen, W. An energy management strategy based on dynamic power factor for fuel cell/battery hybrid locomotive. Int. J. Hydrog. Energy 2018, 43, 3261–3272. [Google Scholar] [CrossRef]
- Tribioli, L.; Cozzolino, R.; Chiappini, D.; Iora, P. Energy management of a plug-in fuel cell/battery hybrid vehicle with on-board fuel processing. Appl. Energy 2016, 184, 140–154. [Google Scholar] [CrossRef]
- Bizon, N. Real-time optimization strategies of Fuel Cell Hybrid Power Systems based on Load-following control: A new strategy, and a comparative study of topologies and fuel economy obtained. Appl. Energy 2019, 241, 444–460. [Google Scholar] [CrossRef]
- Hu, Z.; Li, J.; Xu, L.; Song, Z.; Fang, C.; Ouyang, M.; Dou, G.; Kou, G. Multi-objective energy management optimization and parameter sizing for proton exchange membrane hybrid fuel cell vehicles. Energy Convers. Manag. 2016, 129, 108–121. [Google Scholar] [CrossRef]
- Torreglosa, J.; Jurado, F.; García, P.; Fernández, L. Hybrid fuel cell and battery tramway control based on an equivalent consumption minimization strategy. Control Eng. Pract. 2011, 19, 1182–1194. [Google Scholar] [CrossRef]
- Kermani, S.; Delprat, S.; Guerra, T.M.; Trigui, R. Predictive Control for HEV Energy Management: Experimental Results. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Dearborn, MI, USA, 7–11 September 2009. [Google Scholar]
- Yu, K.; Xu, X.; Liang, Q.; Hu, Z.; Yang, J.; Guo, Y.; Zhang, H. Model Predictive Control for Connected Hybrid Electric Vehicle. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Ouyang, M.; Li, J.; Yang, F.; Lu, L.; Hua, J. Application of Pontryagin’s Minimal Principle to the energy management strategy of plugin fuel cell electric vehicles. Int. J. Hydrog. Energy 2013, 38, 10104–10115. [Google Scholar] [CrossRef]
- Khan, M.J.; Iqbal, M.T. Modelling and Analysis of Electro-chemical, Thermal, and Reactant Flow Dynamics for a PEM Fuel Cell System. Fuel Cells 2005, 5, 463–475. [Google Scholar] [CrossRef]
- Chen, H.; Pei, P. Dynamic model of a proton exchange membrane (PEM) fuel cell during load changes. J. Tsinghua Univ. 2014, 54, 1298–1303. [Google Scholar]
- Pei, P.; Chen, H. Main factors affecting the lifetime of Proton Exchange Membrane fuel cells in vehicle applications: A review. Appl. Energy 2014, 125, 60–75. [Google Scholar] [CrossRef]
- Rong, F.; Huang, C.; Liu, Z.S.; Song, D.; Wang, Q. Microstructure changes in the catalyst layers of PEM fuel cells induced by load cycling: Part II. Simulation and understanding. J. Power Sources 2008, 175, 712–723. [Google Scholar] [CrossRef]
- Shen, Q.; Hou, M.; Liang, D.; Zhou, Z.; Li, X.; Shao, Z.; Yi, B. Study on the processes of start-up and shutdown in proton exchange membrane fuel cells. J. Power Sources 2009, 189, 1114–1119. [Google Scholar] [CrossRef]
- Pei, P.; Chang, Q.; Tang, T. A quick evaluating method for automotive fuel cell lifetime. Int. J. Hydrog. Energy 2008, 33, 3829–3836. [Google Scholar] [CrossRef]
- Kocha, S.S. Electrochemical degradation: Electrocatalyst and support durability. In Polymer Electrolyte Fuel Cell Degradation; Academic Press: Oxford, UK, 2012; pp. a89–214. [Google Scholar]
- Ousfi-Steiner, N.Y.; Moc ¸otéguy, P.; Candusso, D.; Hissel, D. A review on polymer electrolyte membrane fuel cell catalyst degradation and starvation issues: Causes, consequences and diagnostic for mitigation. J. Power Sources 2009, 194, 130–145. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, D.; Luo, M.; Dong, Z. Load profile based empirical model for the lifetime prediction of an automotive PEM fuel cell. Int. J. Hydrog. Energy 2017, 42, 11868–11878. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, R.; He, H.; Shen, W. Lithium-Ion Battery Pack State of Charge and State of Energy Estimation Algorithms Using a Hardware-in-the-Loop Validation. IEEE Trans. Power Electron. 2017, 32, 4421–4431. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Sun, F.; Liu, X.; Liu, Z. Model-based state of charge and peak power capability joint estimation of lithium-ion battery in plug-in hybrid electric vehicles. J. Power Sources 2013, 229, 159–169. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Sun, F.; Zhao, K. Online Estimation of Peak Power Capability of Li-Ion Batteries in Electric Vehicles by a Hardware-in-Loop Approach. Energies 2012, 5, 1455–1469. [Google Scholar] [CrossRef]
- Wu, J.; Xing, X.; Liu, X.; Guerrero, J.M.; Chen, Z. Energy Management Strategy for Grid-Tied Microgrids Considering the Energy Storage Efficiency. IEEE Trans. Ind. Electron. 2018, 65, 9539–9549. [Google Scholar] [CrossRef] [Green Version]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer: New York, NY, USA, 2006. [Google Scholar]
- Schraudolph, N.N.; Yu, J.; Günter, S. A Stochastic Quasi-Newton Method for Online Convex Optimization. J. Mach. Learn. Res. 2007, 2, 436–443. [Google Scholar]
- Grant, M.; Boyd, S.; Ye, Y. Disciplined Convex Programming. Nonconvex Optim. Its Appl. 2007, 84, 155–210. [Google Scholar]
- Grant, M.C.; Boyd, S.P. Graph Implementations for Nonsmooth Convex Programs. Lect. Notes Control Inf. Sci. 2008, 371, 95–110. [Google Scholar]
- Xing, X.; Su, Z.; Tinghong, W.; Fengxiang, C. A simulation on energy management strategy for the power system of a fuel cell/battery HEV based on Cruise/Simulink. Automot. Eng. 2010, 32, 373–378. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Vehicle quality/kg | 1400 | Fuel cell rated power/kW | 30 |
| Motor rated power/kW | 30 | Battery rated power/kW | 60 |
| Motor peak power/kW | 60 | battery capacity/Ah | 30 |
| Vehicle Condition | Control Strategy | Equivalent Hydrogen Consumption (kg) | Power Fluctuation (kW) |
|---|---|---|---|
| UDDS | Algorithm | 0.115 | 1.084 |
| UDDS | Rule | 0.099 | 3.799 |
| NEDC | Algorithm | 0.107 | 1.524 |
| NEDC | Rule | 0.102 | 3.696 |
| Vehicle Condition | SOP | Equivalent Hydrogen Consumption (kg) | Power Fluctuation (kW) |
|---|---|---|---|
| NEDC | Without SOP | 0.122 | 1.585 |
| NEDC | With SOP | 0.107 | 1.524 |
| UDDS | Without SOP | 0.131 | 1.147 |
| UDDS | With SOP | 0.115 | 1.084 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.; Miao, C.; Wu, J.; Zheng, X.; Liu, X.; Liu, X.; Han, F. Research on the Power Distribution Method for Hybrid Power System in the Fuel Cell Vehicle. Energies 2021, 14, 734. https://doi.org/10.3390/en14030734
He Y, Miao C, Wu J, Zheng X, Liu X, Liu X, Han F. Research on the Power Distribution Method for Hybrid Power System in the Fuel Cell Vehicle. Energies. 2021; 14(3):734. https://doi.org/10.3390/en14030734
Chicago/Turabian StyleHe, Yao, Changchang Miao, Ji Wu, Xinxin Zheng, Xintian Liu, Xingtao Liu, and Feng Han. 2021. "Research on the Power Distribution Method for Hybrid Power System in the Fuel Cell Vehicle" Energies 14, no. 3: 734. https://doi.org/10.3390/en14030734