
Model-Free Control Using Improved Smoothing Extended State Observer and Super-Twisting Nonlinear Sliding Mode Control for PMSM Drives


Abstract
:1. Introduction
- This paper is the first to propose a novel MFSTNLSMC strategy that integrates the ST approaching law, the novel NLSMS and the MFC strategy. The particular emphasis here is that the proposed MFSTNLSMC strategy does not require the detailed mathematical models of PMSM.
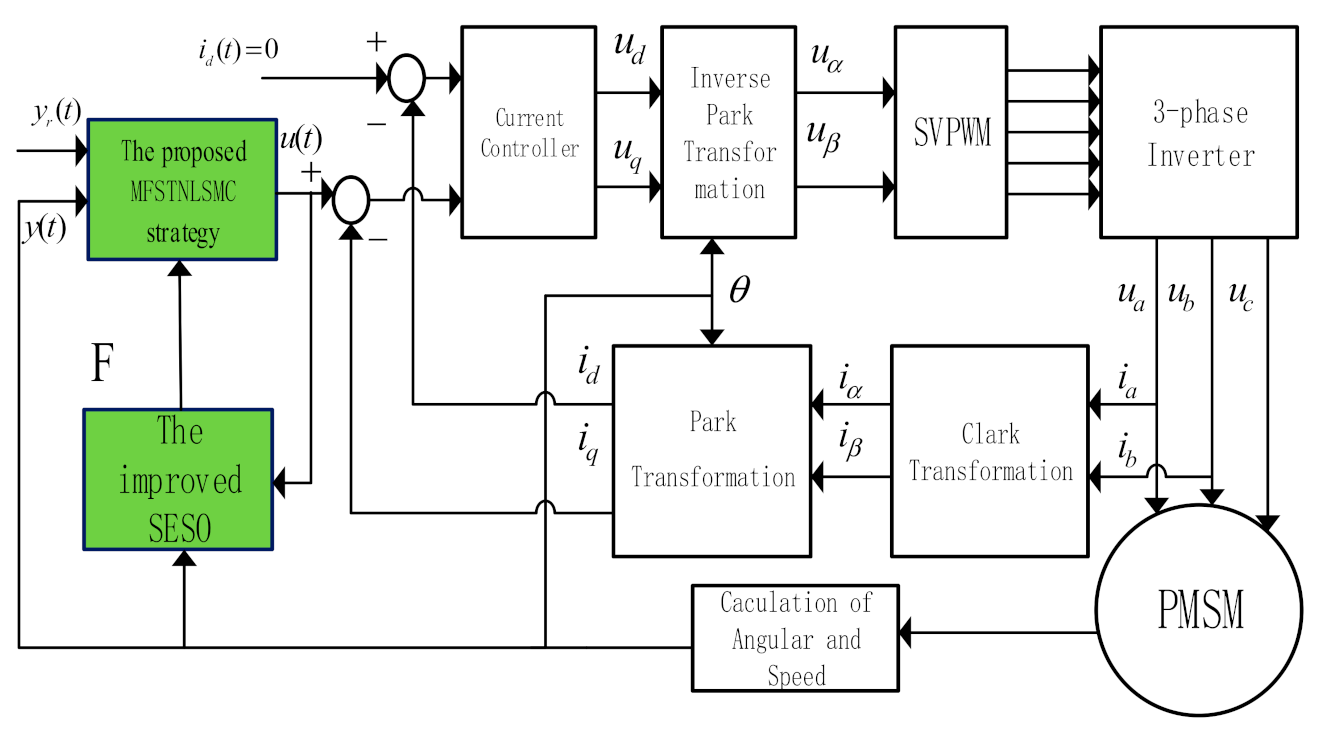
- An improved SESO is proposed to estimate the unknown terms, which is based on the novel MFSTNLSMC strategy proposed for the PMSM speed servo system.
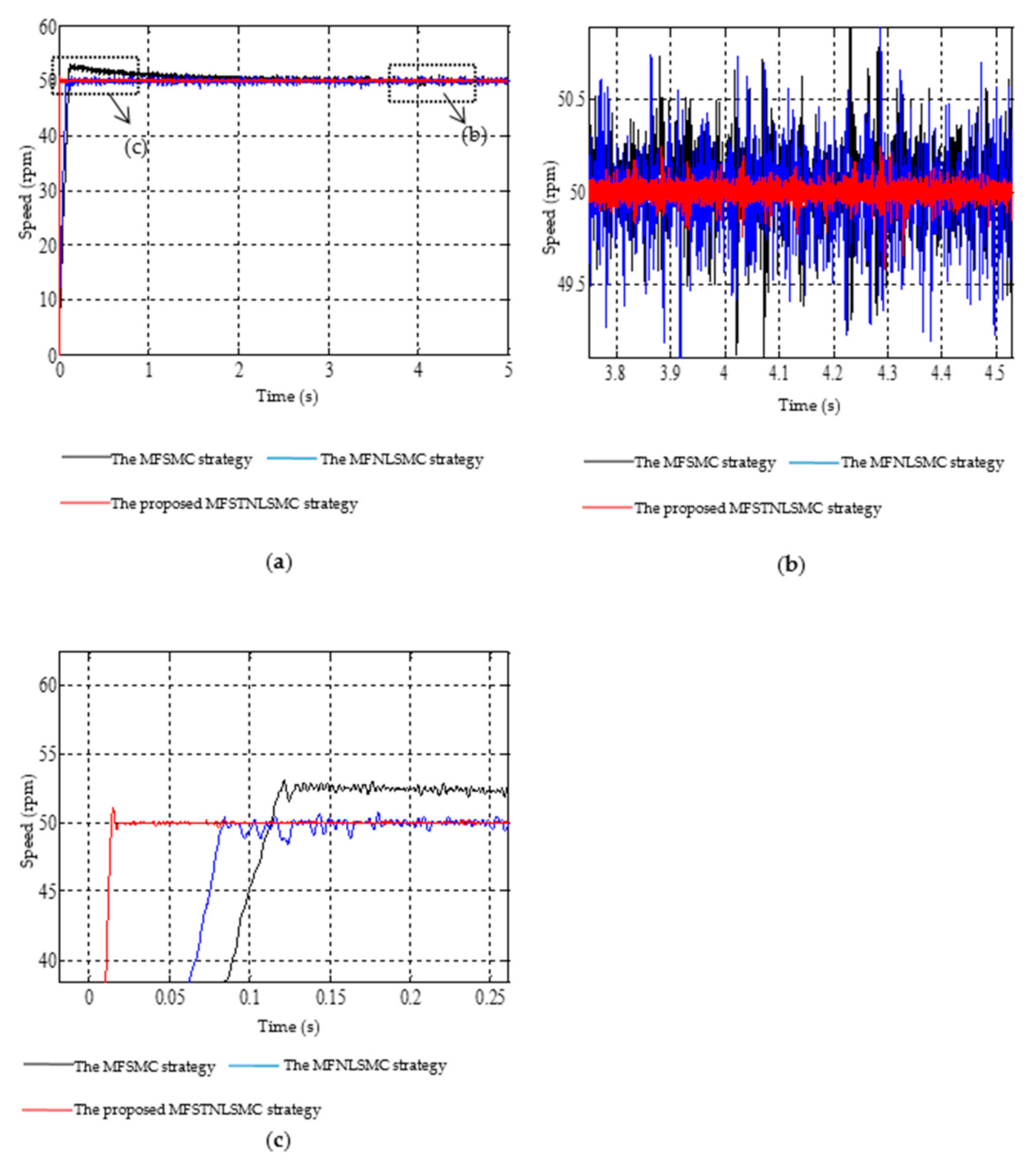
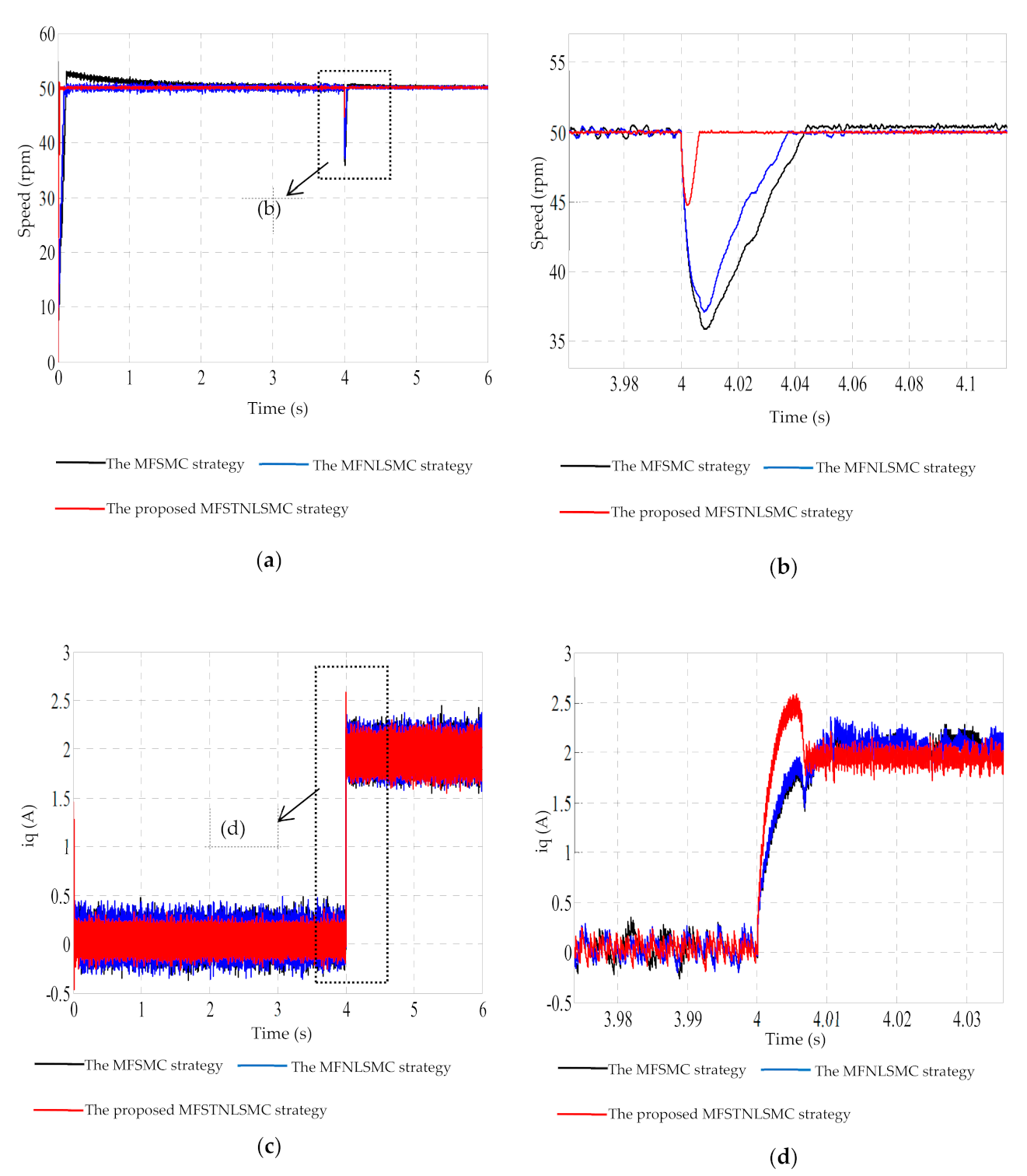
- The effectiveness of the proposed control strategy is proved by the comparative simulations and experimental demonstrations.
2. Problem Formulation
3. Main Results
3.1. Design of Improved SESO
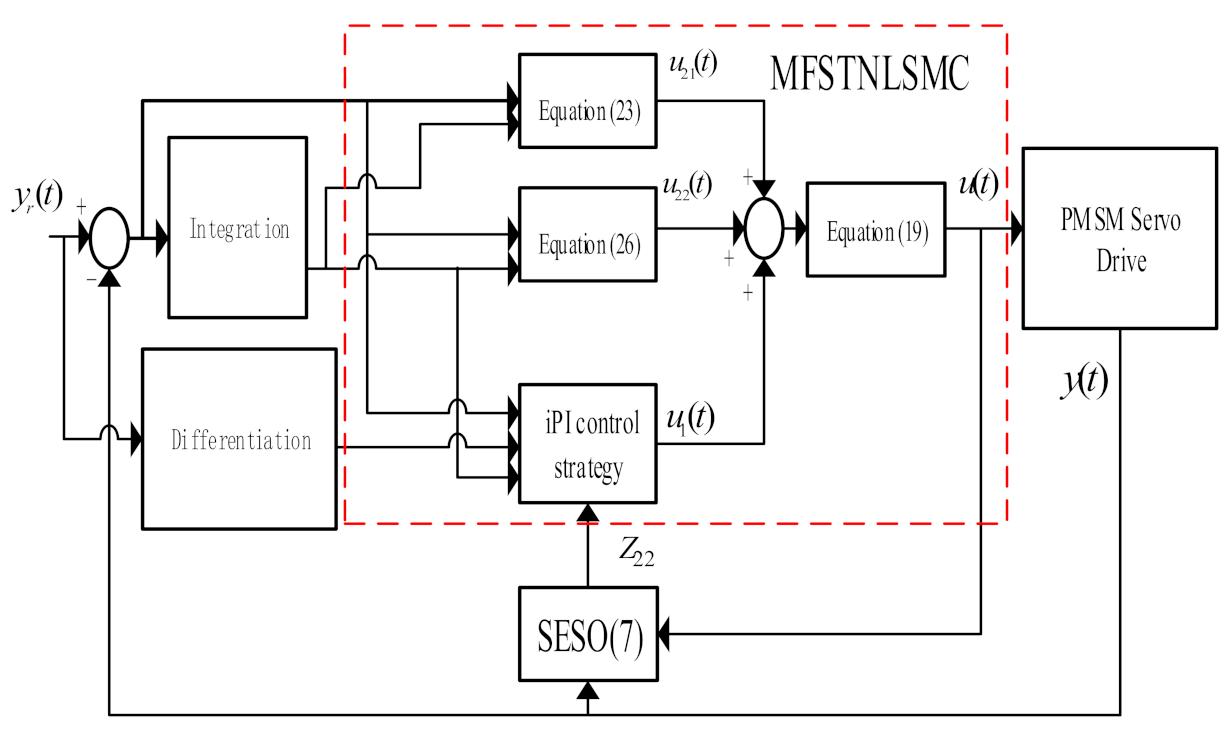
3.2. Design of the Proposed MFSTNLSMC Strategy
3.3. Stability Analysis
4. Comparative Simulations and Experimental Demonstrations
4.1. Comparative Simulations
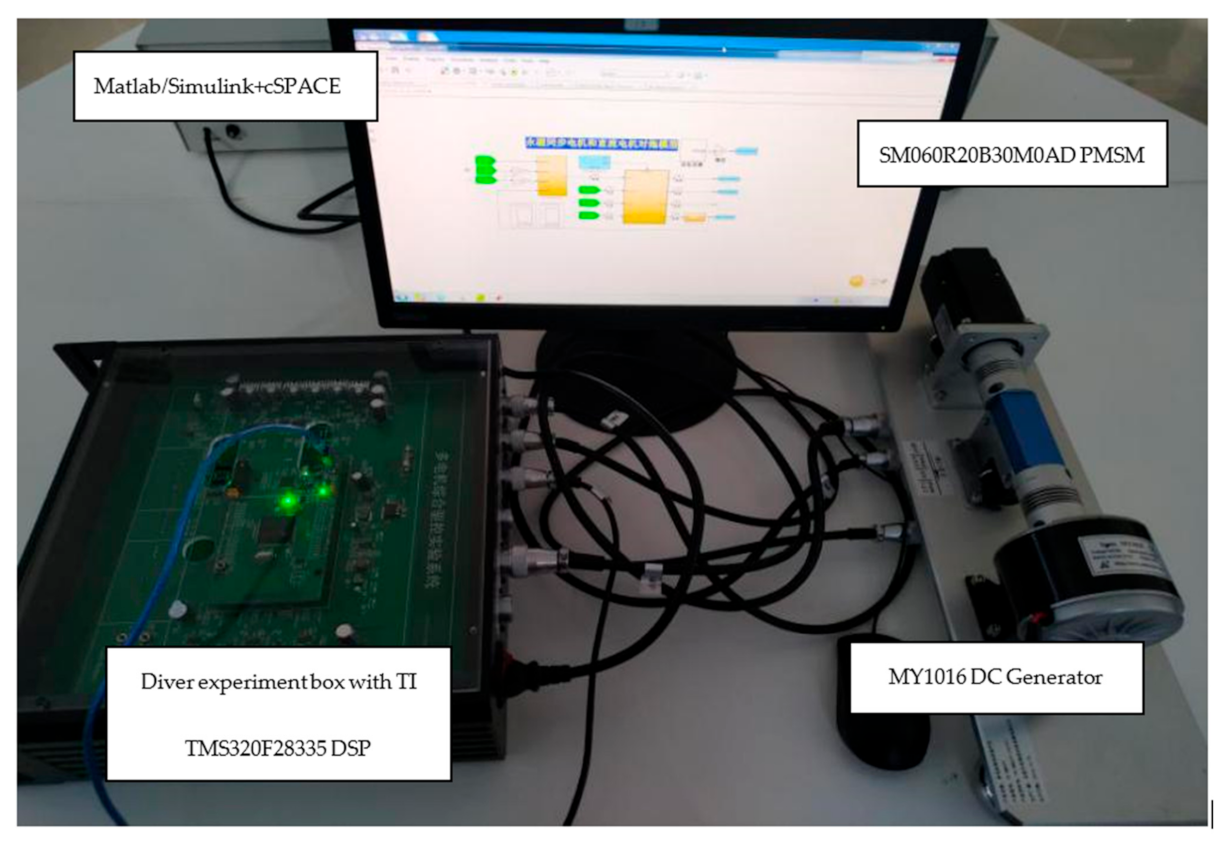
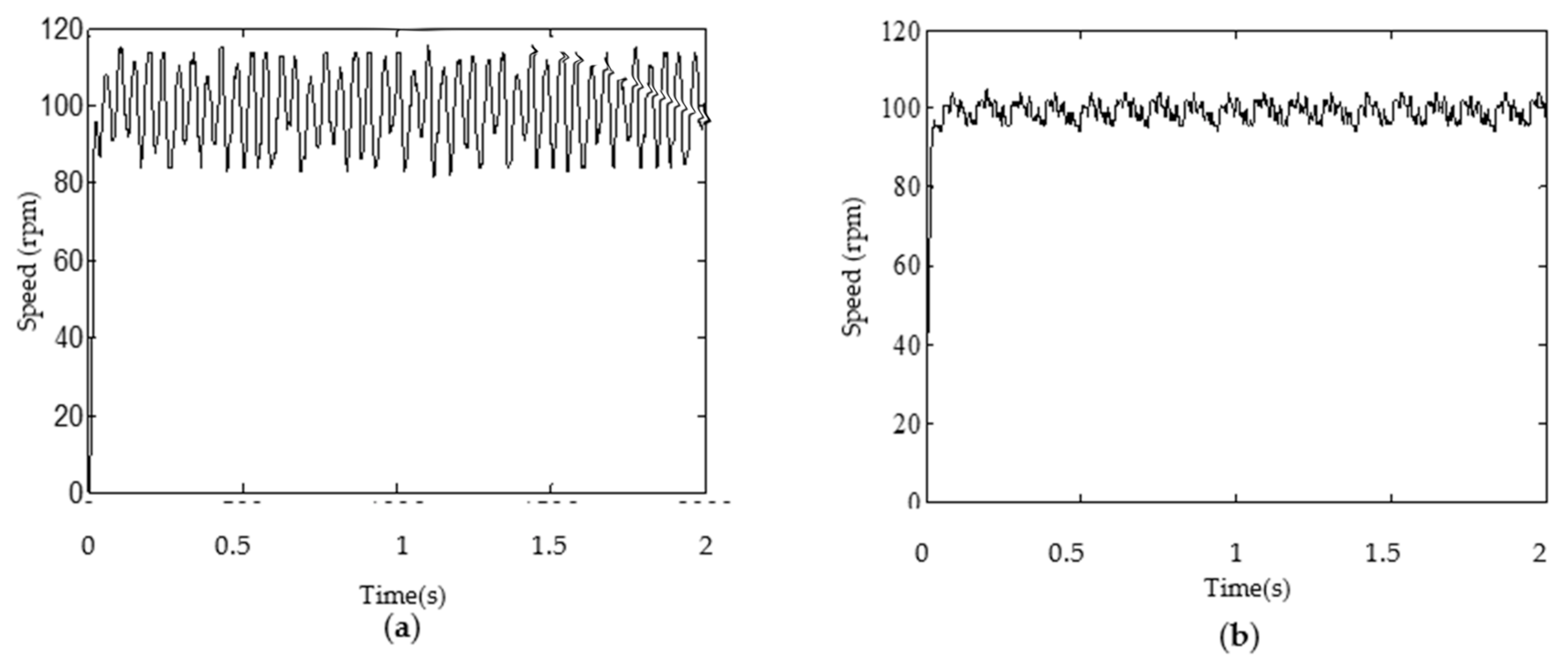
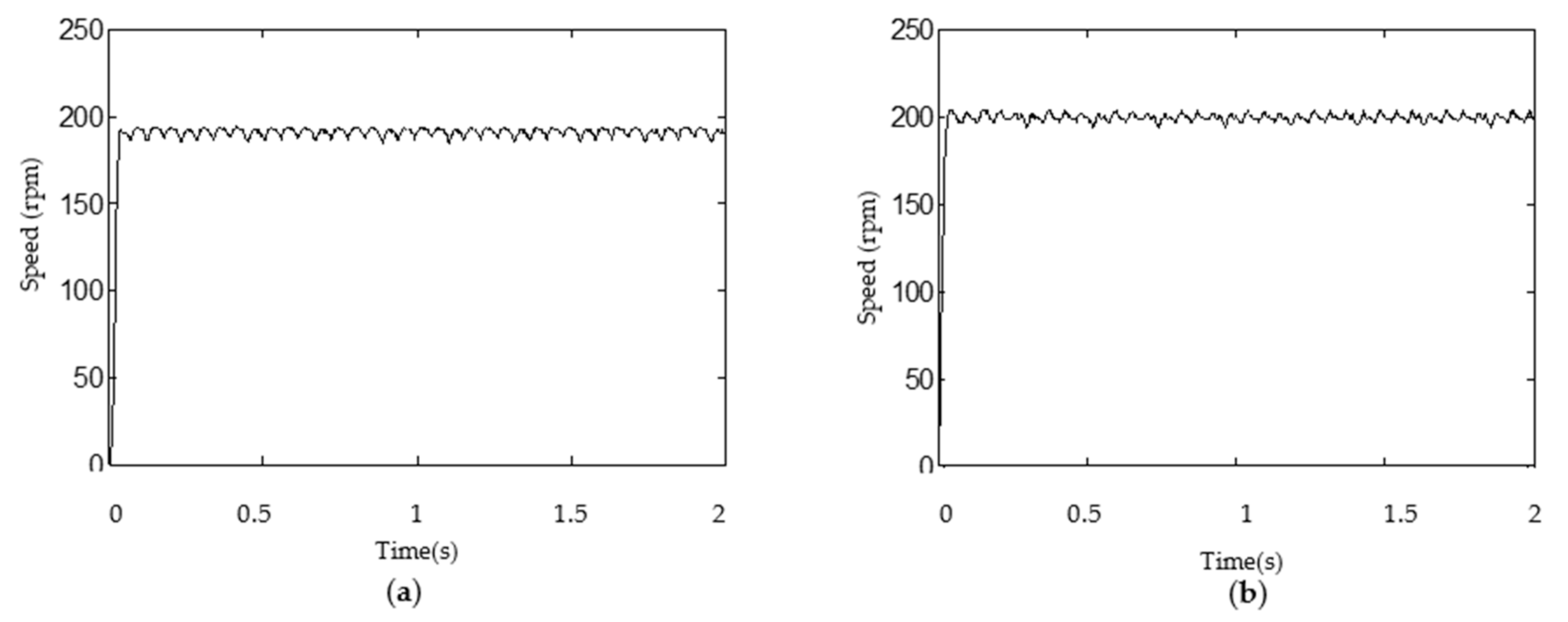
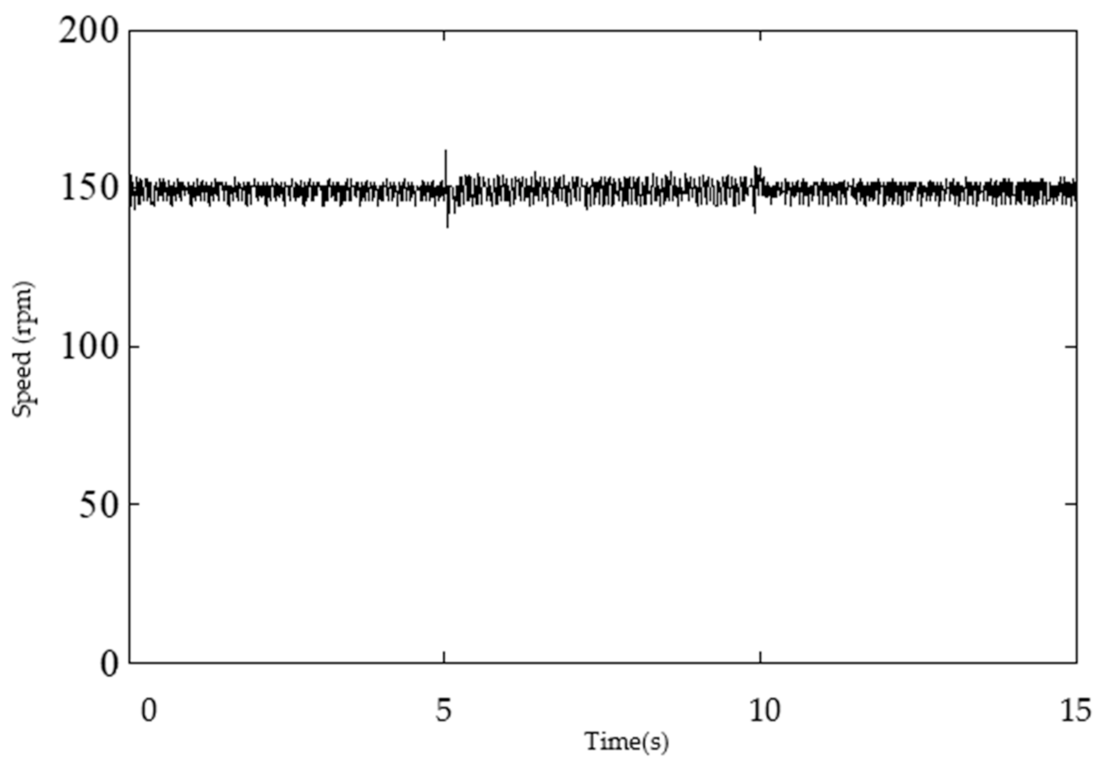
4.2. Experimental Results
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, S.; Zhou, X. Sensorless energy conservation control for permanent magnet synchronous motors based on a novel hybrid observer applied in coal conveyer cystems. Energies 2018, 11, 2554. [Google Scholar] [CrossRef] [Green Version]
- Yan, J.; Wang, H.; Huang, S.; Lan, Y. Load disturbance observer-based complementary sliding mode control for PMSM of the mine traction electric locomotive. Int. J. Fuzzy Syst. 2019, 21, 1051–1058. [Google Scholar] [CrossRef]
- Zhang, Z.; Ma, R.; Wang, L.; Zhang, J. Novel PMSM control for anti-lock braking considering transmission properties of the electric vehicle. IEEE Trans. Veh. Technol. 2018, 67, 10378–10386. [Google Scholar] [CrossRef]
- Dhulipati, H.; Mukundan, S.; Li, Z.; Ghosh, E.; Tjong, J.; Kar, N.C. Torque performance enhancement in consequent pole PMSM based on magnet pole shape optimization for direct-drive EV. IEEE Trans. Magn. 2020. [Google Scholar] [CrossRef]
- Prabhakaran, K.K.; Karthikeyan, A.; Varsha, S.; Perumal, B.V.; Mishra, S. Standalone single stage PV fed reduced switch inverter based PMSM for water pumping application. IEEE Trans. Ind. Appl. 2020. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Wang, P.C.; Hang, D.F.; Lu, B.C. ESO based sliding mode control for the welding robot with backstepping. Int. J. Control 2020. [Google Scholar] [CrossRef]
- Hua, X.X.; Huang, D.; Guo, S.H. Extended state observer based on ADRC of linear system with incipient fault. Int. J. Control Autom. Syst. 2020, 18, 1425–1434. [Google Scholar] [CrossRef]
- Zhou, X.; Zhu, J.; Zhao, B. Extended state observer/proportion integration differentiation compound control based on dynamic modelling for an aerial inertially stabilized platform. Int. J. Adv. Robot. Syst. 2017, 14, 1–10. [Google Scholar] [CrossRef]
- Hua, C.; Li, J.; Yang, Y.; Guan, X. Extended-state-observer based finite-time synchronization control design of teleoperation with experimental validation. Nonlinear Dyn. 2016, 85, 317–331. [Google Scholar] [CrossRef]
- Gao, P.; Lv, X.; Ouyang, H.M.; Mei, L.; Zhang, G.M. A novel model-free intelligent proportional-integral super twisting nonlinear fractional-order sliding mode control of PMSM speed regulation system. Complexity 2020. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, G.M.; Ouyang, H.M.; Mei, L. An adaptive super twisting nonlinear fractional order PID sliding mode control of permanent magnet synchronous motor speed regulation system based on extended state observer. IEEE Access 2020, 8, 53498–53510. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, G.M.; Lv, X.D. Model-free hybrid control with intelligent proportional integral and super-twisting sliding mode control of PMSM drives. Electronics 2020, 9, 1427. [Google Scholar] [CrossRef]
- Mao, W.; Liu, G. Development of an adaptive fuzzy sliding mode trajectory control strategy for two-axis PMSM-driven stage application. Int. J. Fuzzy Syst. 2019, 21, 793–808. [Google Scholar] [CrossRef]
- Leu, V.Q.; Choi, H.H.; Jung, J. Fuzzy sliding mode speed controller for PM synchronous motors with a load torque observer. IEEE Trans. Power Electron. 2012, 27, 1530–1539. [Google Scholar] [CrossRef]
- Merabet, A. Cascade second order sliding mode control for permanent magnet synchronous motor drive. Electronics 2019, 8, 1508. [Google Scholar] [CrossRef] [Green Version]
- Lu, E.; Li, W.; Yang, X.; Liu, Y. Anti-disturbance speed control of low speed high-torque PMSM based on second-order non-singular terminal sliding mode load observer. ISA Trans. 2018, 88, 142–152. [Google Scholar] [CrossRef] [PubMed]
- Sami, I.; Ullah, S.; Ali, Z.; Ullah, N.; Ro, J.S. A super twisting fractional order terminal sliding mode control for DFIG-based wind energy conversion system. Energies 2020, 13, 2158. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, J.W.; Yan, F.; Zhu, K.W.; Chen, B. Adaptive super-twisting fractional-order nonsingular terminal sliding mode control of cable-driven manipulators. ISA Trans. 2019, 86, 163–180. [Google Scholar] [CrossRef] [PubMed]
- Zeb, K.; Busarello, T.D.B.; Islam, S.U.; Uddin, W.; Raghavendra, K.V.G.; Khan, M.A.; Kim, H.J. Design of super twisting sliding mode controller for a three-phase grid-connected photovoltaic system under normal and abnormal conditions. Energies 2020, 13, 3773. [Google Scholar] [CrossRef]
- Li, S.; Wang, H.; Aitouch, A.; Klein, J. Direct power control of DFIG wind turbine systems based on an intelligent proportional-integral sliding mode control. ISA Trans. 2016, 64, 431–439. [Google Scholar] [CrossRef]
- Wang, H.P.; Mustafa, G.I.; Tian, Y. Model-free fractional-order sliding mode control for an active vehicle suspension system. Adv. Eng. Softw. 2018, 115, 452–461. [Google Scholar] [CrossRef]
- Precup, R.E.; Radac, M.B.; Roman, R.C.; Petriu, E.M. Model-free sliding mode control of nonlinear systems: Algorithms and experiments. Inf. Sci. 2017, 381, 176–192. [Google Scholar] [CrossRef]
- Wang, H.; Ye, X.; Tian, Y.; Zheng, G.; Christov, N. Model-free based terminal SMC of quadrotor attitude and position. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2519–2528. [Google Scholar] [CrossRef]
- Lai, C.K.; Shyu, K.K. A novel motor drive design for incremental motion system via sliding-mode control method. IEEE Trans. Ind. Electron. 2005, 52, 499–507. [Google Scholar] [CrossRef]
- Fliess, M.; Join, C. Intelligent PID controllers. In Proceedings of the 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June; 2008. [Google Scholar]
- Fliess, M.; Join, C. Model-free control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.W.; Wei, W.; Zhang, C.; Liu, H.; Xiu, S. Study on permanent magnet synchronous motor servo system based on total sliding mode control approach with nonlinear integrator. Trans. China Electrotech. Soc. 2018, 33, 3917–3924. [Google Scholar]
- Liu, J.; Zhou, F.H.; Zhao, C.C.; Wang, Z.R. A PI-type sliding mode controller design for PMSG-based wind turbine. Complexity 2019. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.T.; Xie, M.Y.; Wu, H.T.; Ma, J.Y.; Li, Y.; Gu, H.L. Composite proportional-integral sliding mode control with feedforward control for cell puncture mechanism with piezoelectric actuation. ISA Trans. 2020. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Yang, H.J.; Guo, M.C.; Xia, Y.Q.; Sun, Z.Q. Dual closed-loop tracking control for wheeled mobile robots via active disturbance rejection control and model predictive control. Int. J. Robust Nonlinear Control 2020, 30, 80–99. [Google Scholar] [CrossRef]
- Sadeghi, R.; Madani, S.M.; Ataei, M.; Kashkooli, M.R.A.; Ademi, S. Super-twisting sliding mode direct power control of brushless doubly fed induction generator. IEEE Trans. Ind. Electron. 2018, 65, 9147–9156. [Google Scholar] [CrossRef]
- Lu, J.; Savaghebi, M.; Ghias, A.M.Y.M.; Hou, X.; Guerrero, J.M. A reduced-order generalized proportional integral observer-based resonant supertwisting sliding mode control for gridconnected power converters. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Yan, X.; Cheng, M. A robustness-improved control method based on ST-SMC for cascaded brushless doubly fed induction generator. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Values and Units |
|---|---|
| Flux linkage | |
| Pole pairs | 4 |
| Rotational inertia | |
| Damping coefficient | |
| Power supply voltage | 311 V |
| Stator resistance | 2.875 |
| Stator inductance | 8.5 mH |
| Parameters | ||||||
|---|---|---|---|---|---|---|
| Symbol | 1 | 1 | 0.3 | 0.3 | 1000 | 400 |
| Parameters | ||||||||
|---|---|---|---|---|---|---|---|---|
| Symbol | 1 | 1 | 0.3 | 0.3 | 1000 | 1 | 0.25 | 400 |
| Parameters | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Symbol | 1 | 1 | 0.3 | 0.3 | 1000 | 1 | 0.25 | 2000 | 64 |
| Control Strategies | Impact of Speed Response Curve When the External Load Sudden Increase | |
|---|---|---|
| Perturbation Amplitude (%) | Recovery Time (s) | |
| The MFSMC strategy | 27.8 | 0.043 |
| The MFNLSMC strategy | 23.6 | 0.036 |
| The proposed MFSTNLSMC strategy | 10.2 | 0.006 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, P.; Zhang, G.; Lv, X. Model-Free Control Using Improved Smoothing Extended State Observer and Super-Twisting Nonlinear Sliding Mode Control for PMSM Drives. Energies 2021, 14, 922. https://doi.org/10.3390/en14040922
Gao P, Zhang G, Lv X. Model-Free Control Using Improved Smoothing Extended State Observer and Super-Twisting Nonlinear Sliding Mode Control for PMSM Drives. Energies. 2021; 14(4):922. https://doi.org/10.3390/en14040922
Chicago/Turabian StyleGao, Peng, Guangming Zhang, and Xiaodong Lv. 2021. "Model-Free Control Using Improved Smoothing Extended State Observer and Super-Twisting Nonlinear Sliding Mode Control for PMSM Drives" Energies 14, no. 4: 922. https://doi.org/10.3390/en14040922