
Real-Time Minimization of Mechanical Specific Energy with Multivariable Extremum Seeking


Abstract
:1. Introduction
2. Safe and Efficient Drilling as an Optimization Problem
2.1. Drilling Model
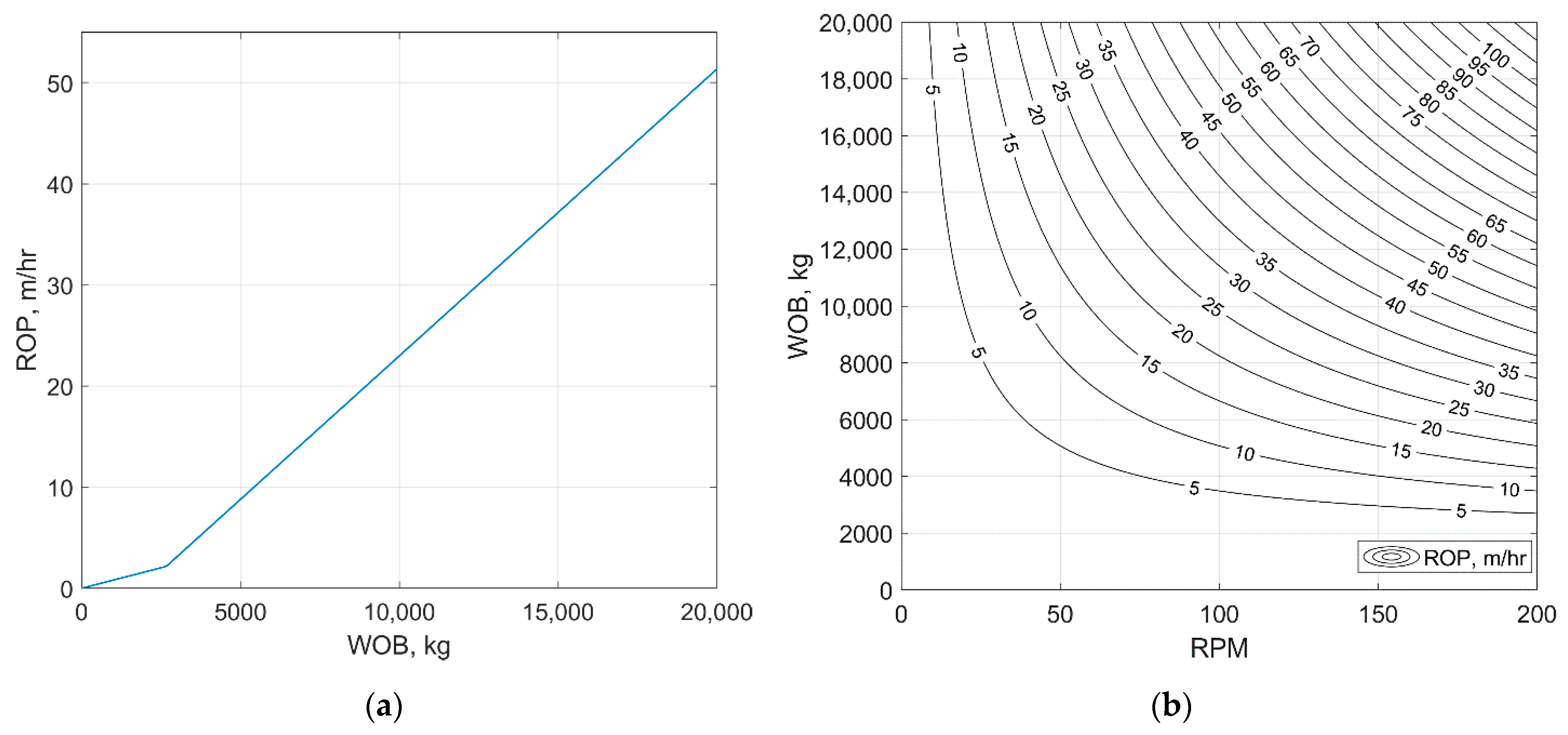
- Phase I drilling, where the WOB is not adequate to force the cutters to fully engage the formation, resulting in inefficient drilling. It is postulated that this inefficiency is caused by the cutters having a blunt underside, a wear flat, which supports some of the WOB and is a source of friction that does not contribute to the excavation of rock. In phase I, drilling with higher WOB will increase the depth of cut, which translates to higher ROP. At the same time, the increased depth of cut will expose a larger area of the wear flats to contact with the formation, which in turn makes the wear flats carry more WOB. The WOB being translated partly to increased cutting action and partly as friction on the wear flats continues until a threshold WOB which marks the onset of the next drilling phase. An ideally sharp bit will in theory never drill in phase I, as it has no wear flats.
- Phase II drilling, which is characterized by efficient drilling with the bit acting incrementally as an ideally sharp bit. At the onset of phase II drilling the contact forces between the wear flat and the formation are fully engaged. Further increases in WOB value will result in the rock deforming beneath the cutters without any increase in the contact area between the wear flat and formation. An increase in WOB while in phase II will be transferred solely to increasing depth of cut and correspondingly increasing ROP at peak efficiency, up to a point where a drilling dysfunction starts diminishing the efficiency of the cutting action.
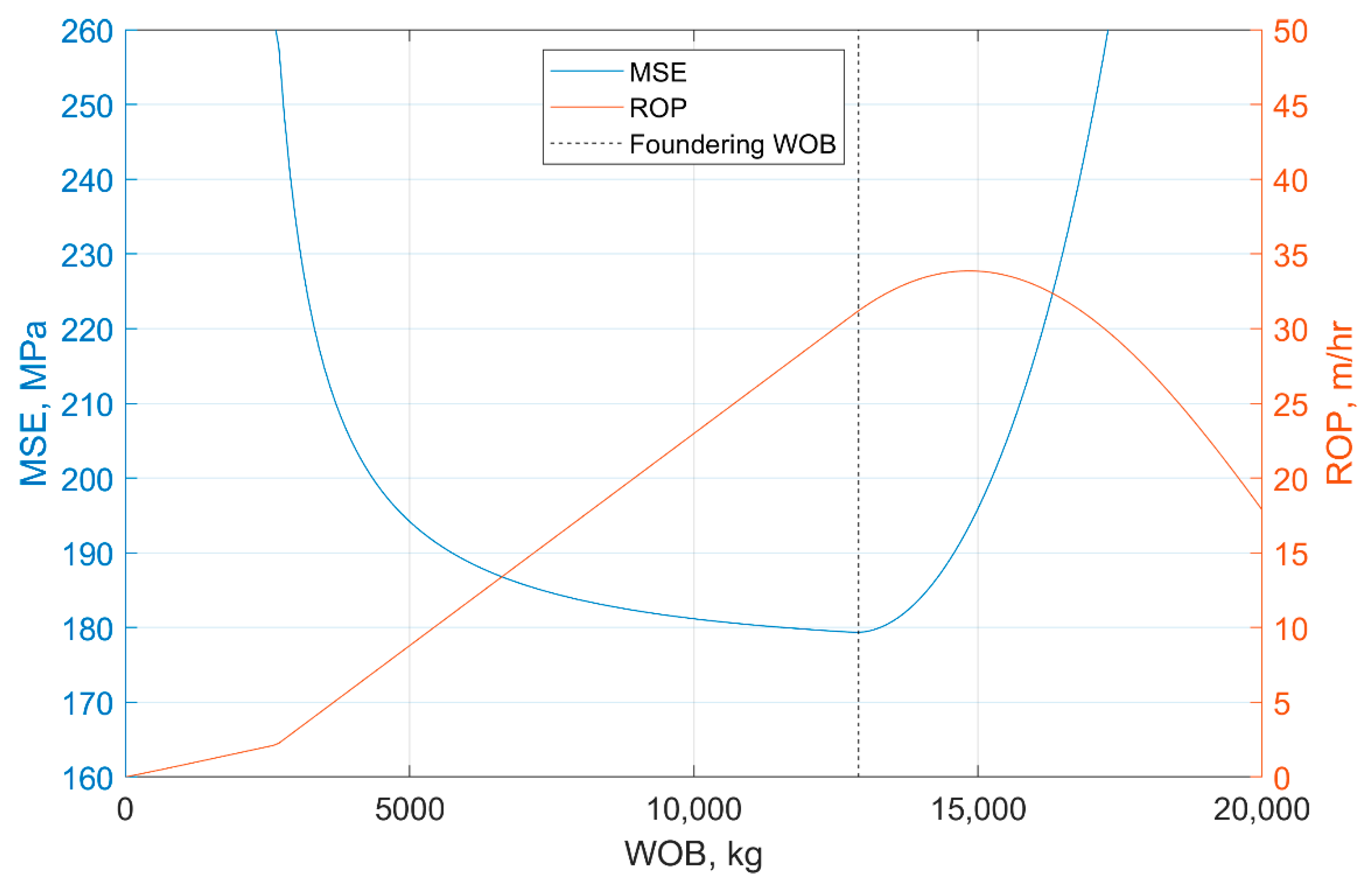
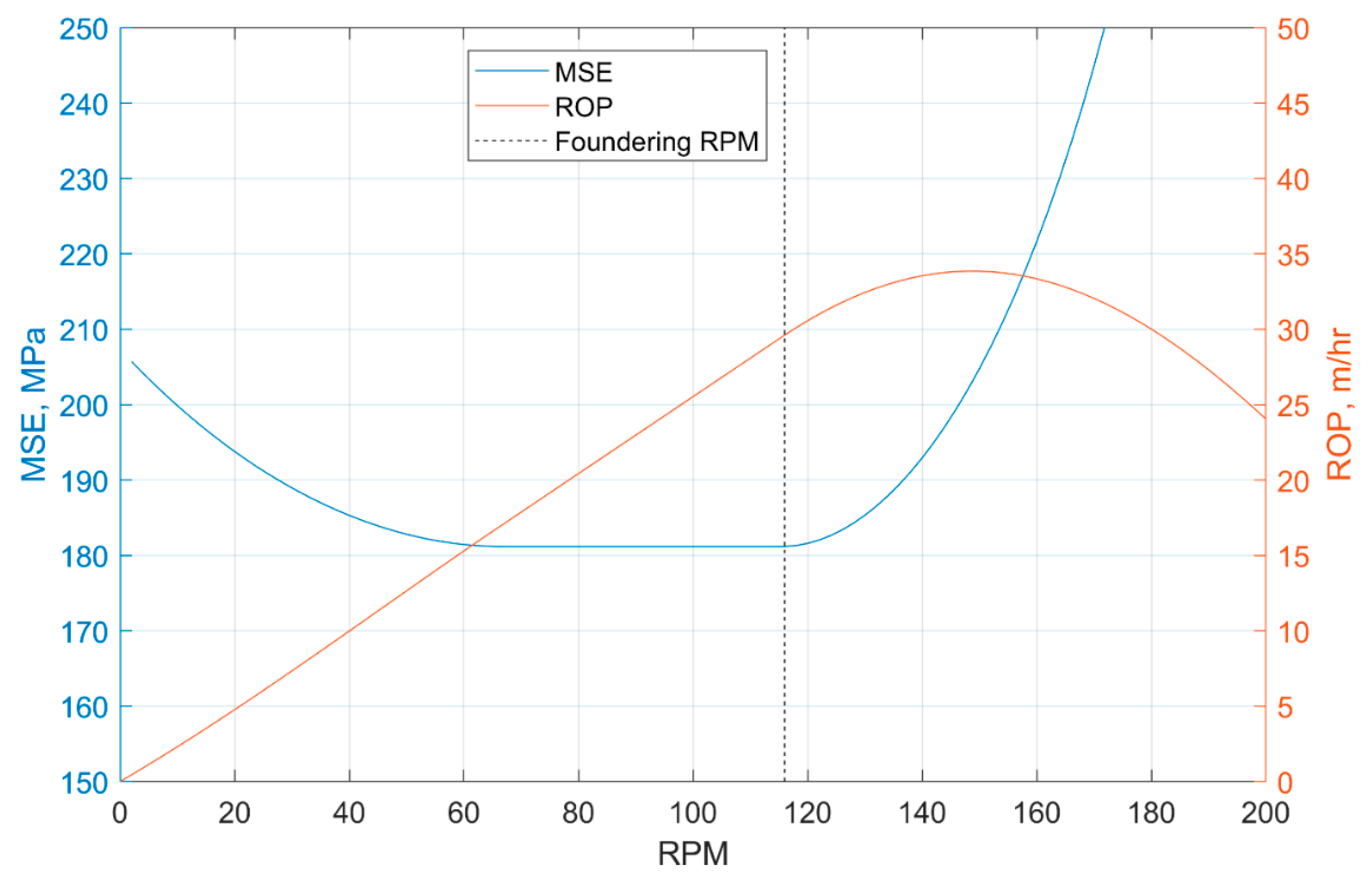
- Phase III drilling, where an increase in contact forces between the bit and formation results in less of the applied WOB being translated to cutting action, which leads to a reduction in depth of cut and less efficient drilling. The onset of phase III drilling is referred to as the founder point and is often considered the optimal conditions to drill at [12,31].
2.2. Drilling Dysfunctions and Constraints
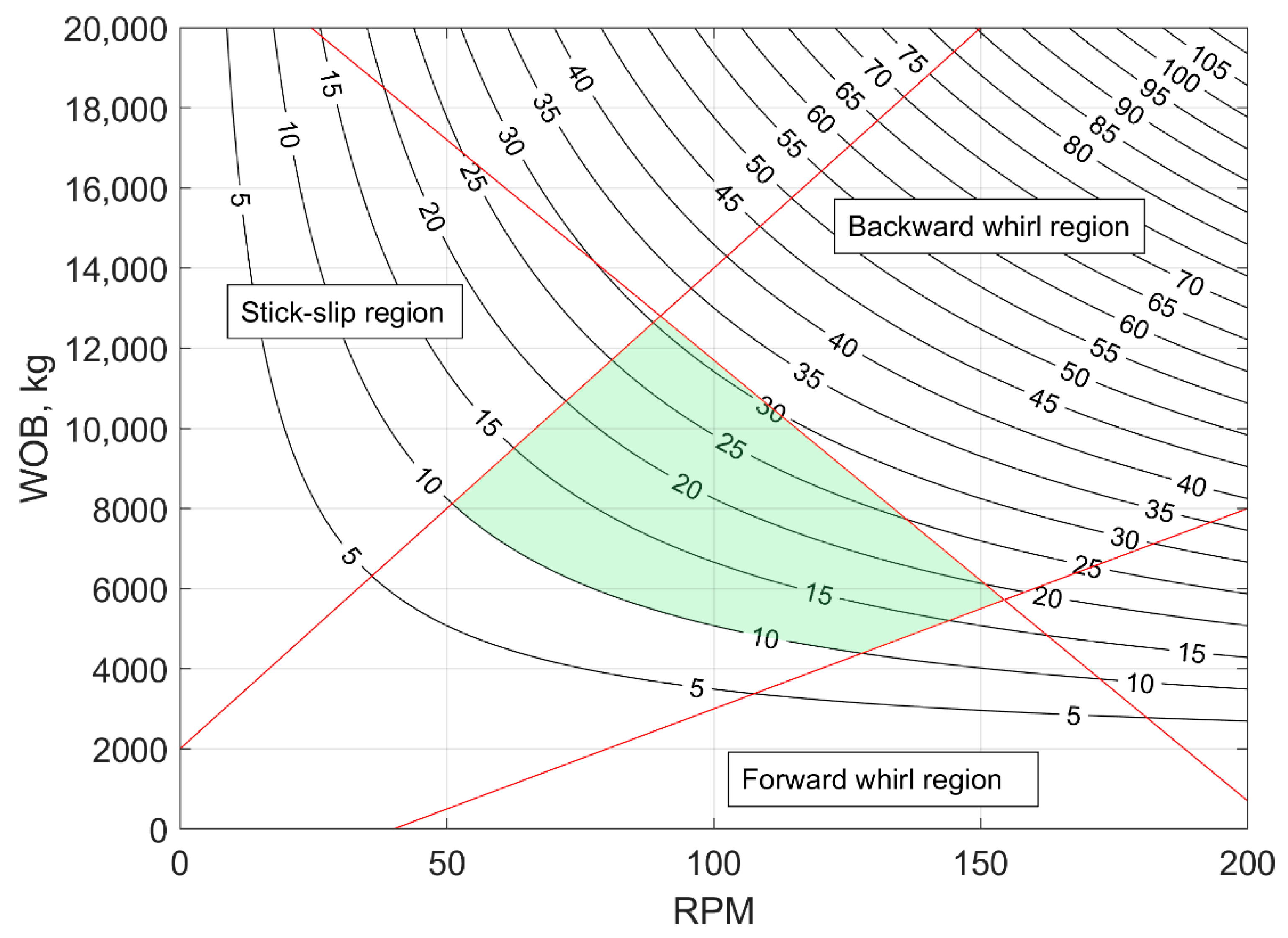
- Foundering effects that reduce the efficiency of energy transferal between the bit and the formation, which causes inefficient drilling. They can be caused by vibrations such as stick-slip and whirl, as well as bit or bottomhole balling. These dysfunctions will result in ROP values that are lower than what would be seen with an efficient bit for a given WOB and RPM.
- Energy input limiters, which constrain the amount of energy that can be applied through the input parameters WOB and RPM when drilling. In the case when the input energy is constrained before the onset of foundering effects, the bit would still be able to drill more efficiently at higher values of WOB and/or RPM, but because of a system constraint these parameters cannot be increased. A multitude of input energy limiters have been reported in the literature, such as a maximal WOB or RPM determined by bit or bottom hole assembly (BHA) design, a maximal ROP dictated by hole cleaning or solids handling capacity on the surface, a maximal top drive torque rating or top-side vibrations [8,9,13].
2.3. Mechanical Specific Energy
3. Drilling Optimization with Extremum Seeking
3.1. The Extremum Seeking Algorithm
- The excitation signal, which varies the input variables around a base value to investigate the current drilling conditions.
- Gradient estimation, which quantifies how the process reacts to the excitation signal by estimating partial derivatives of the objective function with respect to the input variables.
- Adaptation, which adjusts the base values of the input variables with a magnitude and direction determined by the estimated gradients, to seek out drilling conditions that result in lower MSE values.
3.1.1. The Excitation Signal
3.1.2. Gradient Estimation
3.1.3. Adaptation
3.2. Algorithm Design Choices
3.3. Constraint Handling
3.3.1. Modified Objective Function
3.3.2. Predictive Constraint Handling
3.3.3. Reactive Constraint Handling
3.4. Practical Requirements and Algorithm Tuning
4. Simulation Results
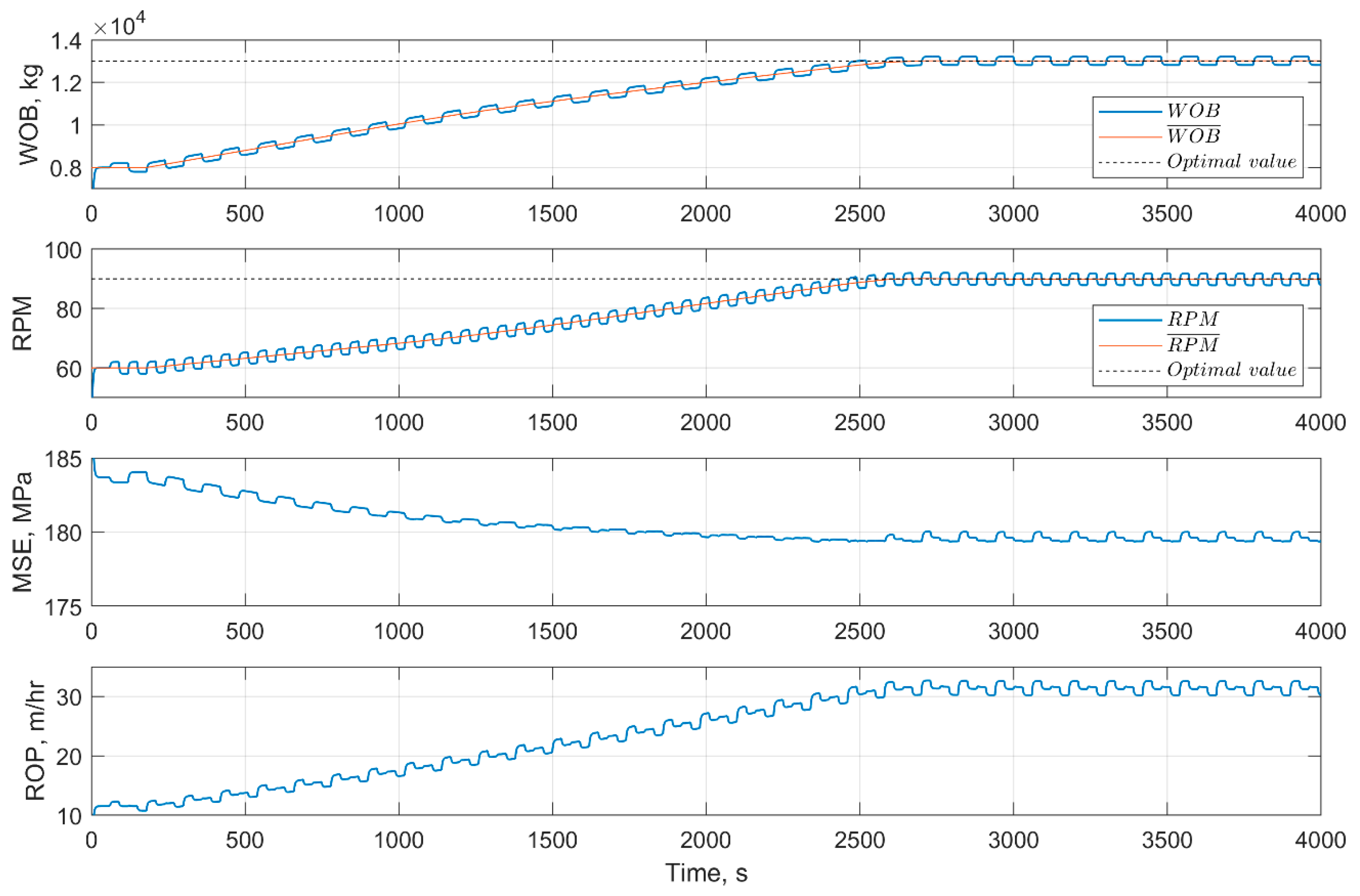
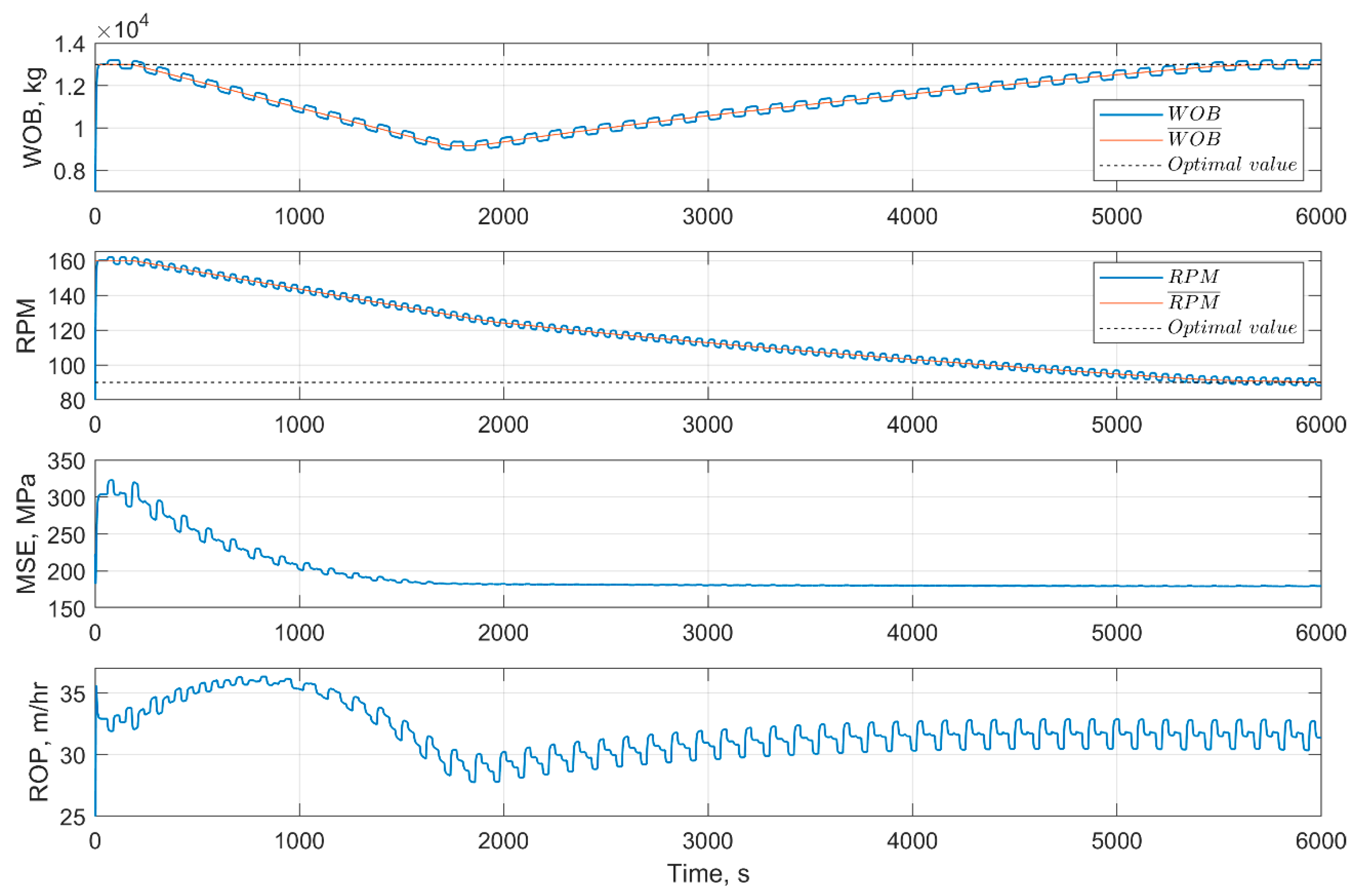
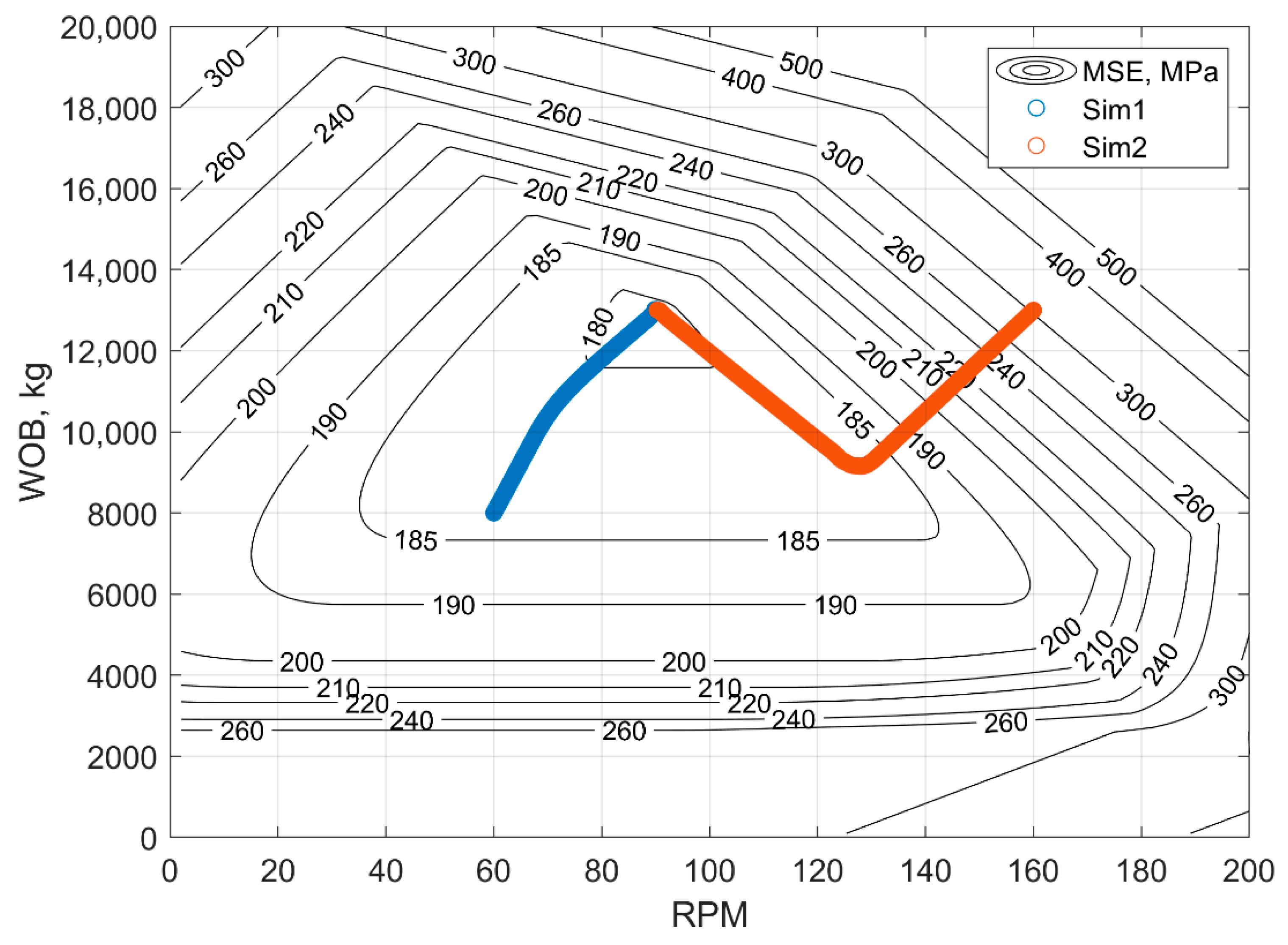
4.1. Unconstrained Drilling Optimization
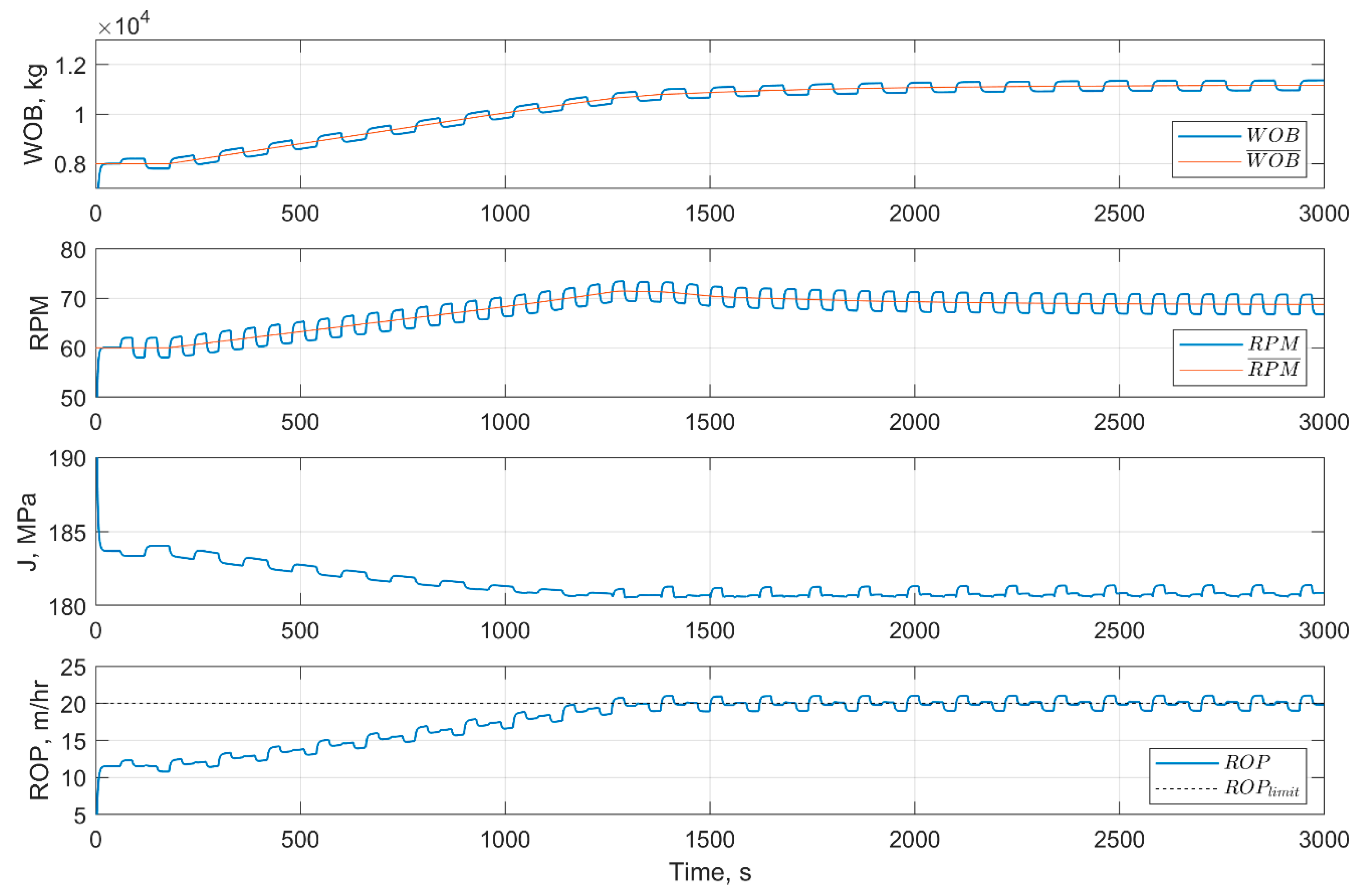
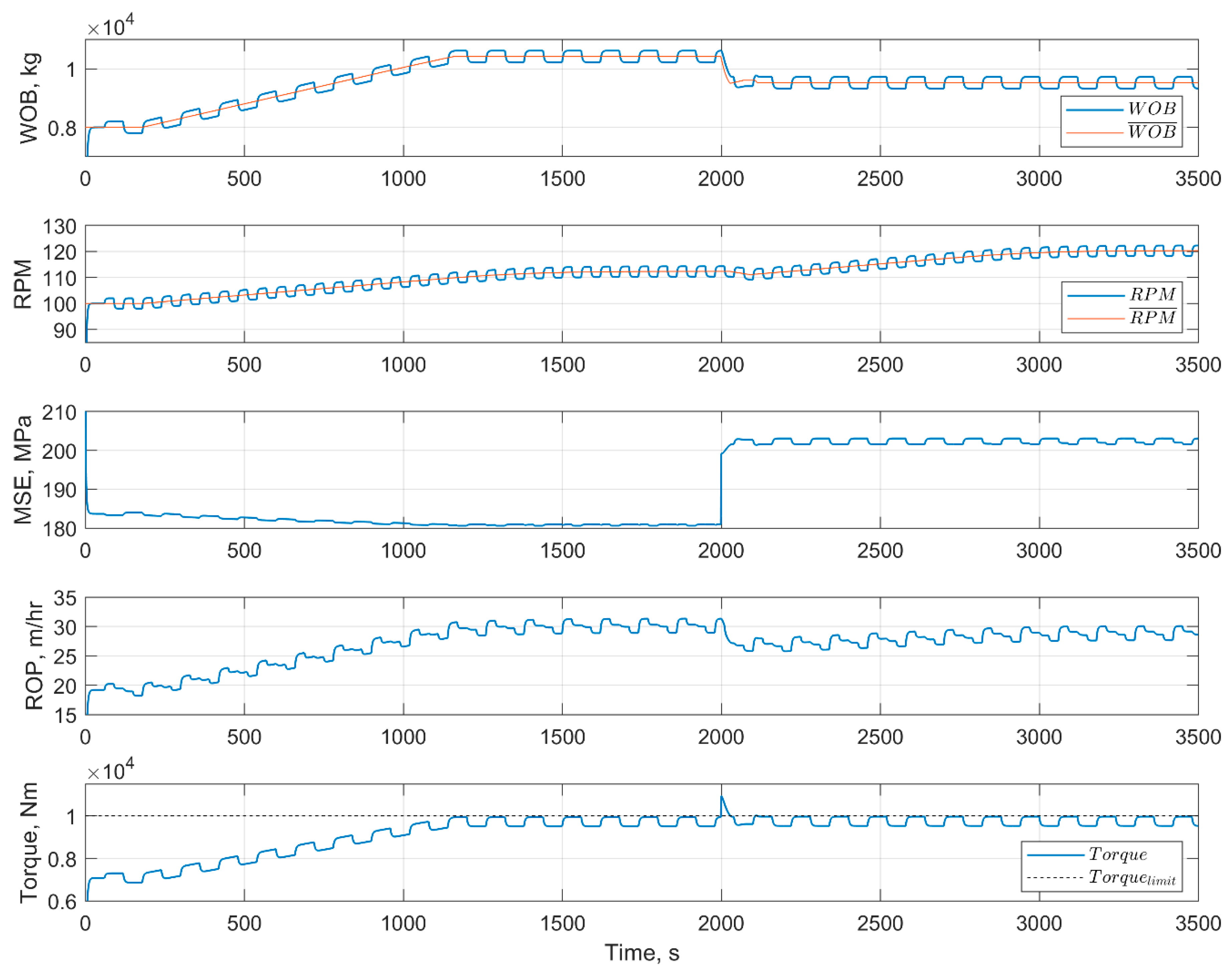
4.2. Constrained Drilling Optimization
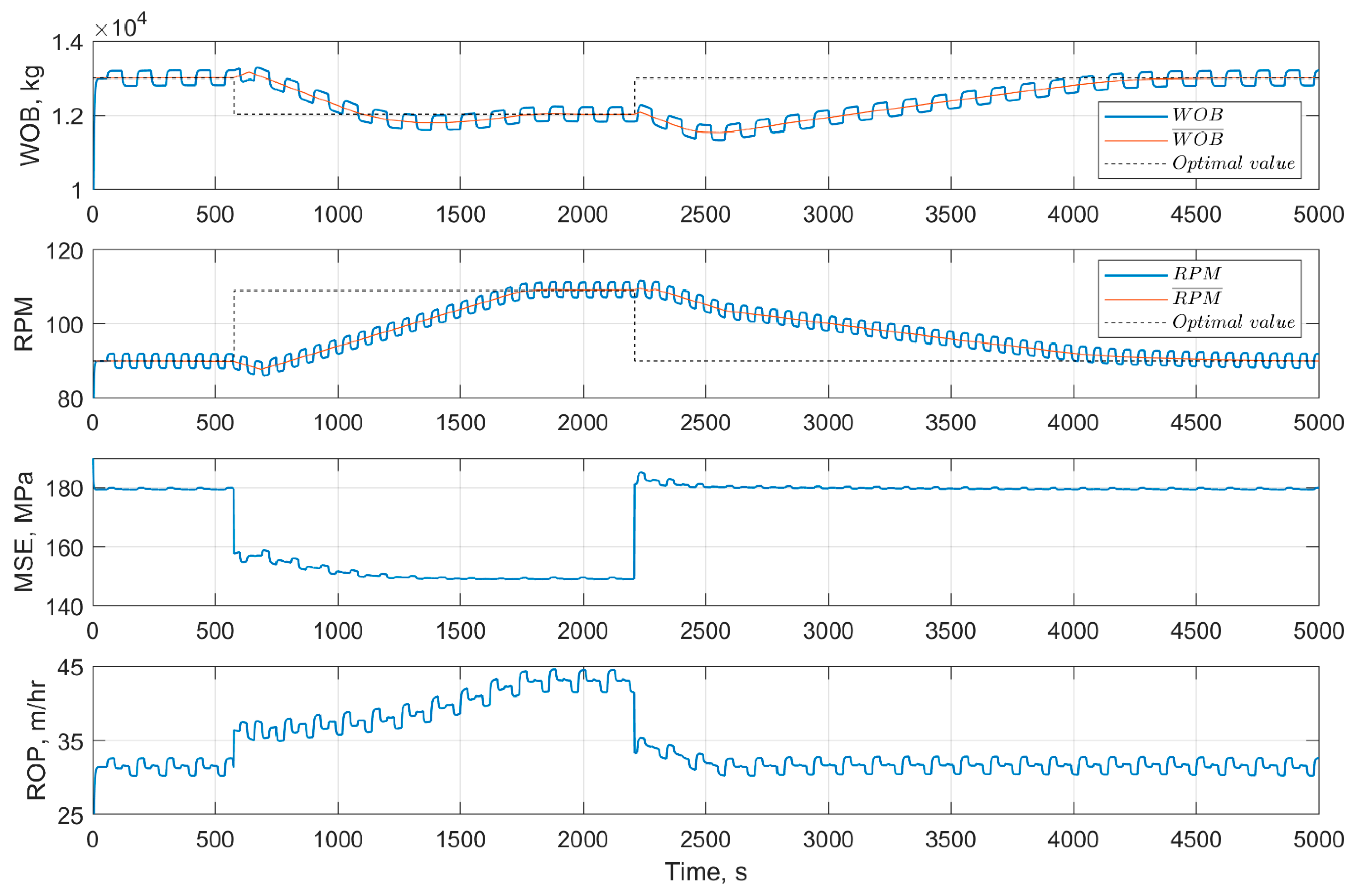
4.3. Unconstrained Drilling with Formation Shifts
5. Discussion of Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BHA | Bottom Hole Assembly |
| ES | Extremum Seeking |
| MSE | Mechanical Specific Energy |
| NPT | Non-Productive Time |
| PDC | Polycrystalline Diamond Compact |
| PI | Proportional-Integral |
| RPM | Revolutions Per Minute (drill string rotational rate) |
| T | Torque |
| WOB | Weight on Bit |
Appendix A. Period Selection for the Excitation Signals
References
- Eustes, A.W. The Evolution of Automation in Drilling. In Proceedings of the SPE Annual Technical Conference and Exhibition, Anaheim, CA, USA, 11–14 November 2007. [Google Scholar]
- Chmela, B.; Gibson, N.; Abrahamsen, E.; Bergerud, R. Safer Tripping Through Drilling Automation. In Proceedings of the IADC/SPE Drilling Conference and Exhibition, Fort Worth, TX, USA, 4–6 March 2014. [Google Scholar]
- Iversen, F.P.; Cayeux, E.; Dvergsnes, E.W.; Ervik, R.; Welmer, M.; Balov, M.K. Offshore Field Test of a New System for Model Integrated Closed-Loop Drilling Control. SPE Drill. Completion 2009, 24, 518–530. [Google Scholar] [CrossRef]
- Gulsrud, T.O.; Nybø, R.; Bjørkevoll, K.S. Statistical Method for Detection of Poor Hole Cleaning and Stuck Pipe. In Proceedings of the SPE Offshore Europe Oil and Gas Conference and Exhibition, Aberdeen, UK, 8–11 September 2009. [Google Scholar]
- Tarr, B.A.; Ladendorf, D.W.; Sanchez, D.; Milner, G.M. Next-Generation Kick Detection During Connections: Influx Detection at Pumps Stop (IDAPS) Software. SPE Drill. Completion 2016, 31, 250–260. [Google Scholar] [CrossRef]
- Kyllingstad, A.; Nessjøen, P.J. A New Stick-Slip Prevention System. In Proceedings of the SPE/IADC Drilling Conference and Exhibition, Amsterdam, The Netherlands, 17–19 March 2009. [Google Scholar]
- Runia, D.J.; Dwars, S.; Stulemeijer, I.P. A Brief History of the Shell “Soft Torque Rotary System” and Some Recent Case Studies. In Proceedings of the SPE/IADC Drilling Conference, Amsterdam, The Netherlands, 5–7 March 2013. [Google Scholar]
- Chapman, C.D.; Sanchez, J.L.; De Leon Perez, R.; Yu, H. Automated Closed-Loop Drilling with ROP Optimization Algorithm Significantly Reduces Drilling Time and Improves Downhole Tool Reliability. In Proceedings of the IADC/SPE Drilling Conference and Exhibition, San Diego, CA, USA, 6–8 March 2012. [Google Scholar]
- Dunlop, J.; Isangulov, R.; Aldred, W.D.; Sanchez, H.A.; Flores, J.L.S.; Herdoiza, J.A.; Belaskie, J.; Luppens, C. Increased Rate of Penetration Through Automation. In Proceedings of the SPE/IADC Drilling Conference and Exhibition, Amsterdam, The Netherlands, 1–3 March 2011. [Google Scholar]
- Teale, R. The Concept of Specific Energy in Rock Drilling. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1965, 2, 57–73. [Google Scholar] [CrossRef]
- Koederitz, W.L.; Weis, J. A Real-Time Implementation of MSE. In Proceedings of the AADE National Technical Conference and Exhibition, Houston, TX, USA, 5–7 April 2005. [Google Scholar]
- Dupriest, F.; Hutchison, I.; Oort, E.v.; Armstrong, N. The IADC Drilling Manual—Drilling Practices, 12th ed.; International Association of Drilling Contractors: Houston, TX, USA, 2014. [Google Scholar]
- Dupriest, F.E.; Koederitz, W.L. Maximizing Drill Rates with Real-Time Surveillance of Mechanical Specific Energy. In Proceedings of the SPE/IADC Drilling Conference, Amsterdam, The Netherlands, 23–25 February 2005. [Google Scholar]
- Wu, S.X.; Paez, L.; Partin, U.; Agnihotri, M. Decoupling Stick-Slip and Whirl to Achieve Breakthrough in Drilling Performance. In Proceedings of the IADC/SPE Drilling Conference and Exhibition, New Orleans, LA, USA, 2–4 February 2010. [Google Scholar]
- Bataee, M.; Kamyab, M.; Ashena, R. Investigation of Various ROP Models and Optimization of Drilling Parameters for PDC and Roller-cone Bits in Shadegan Oil Field. In Proceedings of the International Oil and Gas Conference and Exhibition in China, Beijing, China, 8–10 June 2010. [Google Scholar]
- Sui, D.; Aadnoy, B. Rate of Penetration Optimization using Moving Horizon Estimation. Modeling Identif. Control A Nor. Res. Bull. 2016, 37, 149–158. [Google Scholar] [CrossRef] [Green Version]
- Young, F.S., Jr. Computerized Drilling Control. J. Pet. Technol. 1969, 21, 483–496. [Google Scholar] [CrossRef]
- Rommetveit, R.; Bjørkevoll, K.S.; Halsey, G.W.; Larsen, H.F.; Merlo, A.; Nossaman, L.N.; Sweep, M.N.; Silseth, K.M.; Ødegaard, S.I. Drilltronics: An Integrated System for Real-Time Optimization of the Drilling Process. In Proceedings of the IADC/SPE Drilling Conference, Dallas, TX, USA, 2–4 March 2004. [Google Scholar]
- Spencer, S.J.; Mazumdar, A.; Jiann-Cherng, S.; Foris, A.; Buerger, S.P. Estimation and Control for Efficient Autonomous Drilling Through Layered Materials. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 176–182. [Google Scholar]
- Chang, D.-L.; Payette, G.S.; Pais, D.; Wang, L.; Bailey, J.R.; Mitchell, N.D. Field Trial Results of a Drilling Advisory System. In Proceedings of the International Petroleum Technology Conference, IPTC, Doha, Qatar, 19–22 January 2014. [Google Scholar]
- Koederitz, W.L.; Johnson, W.E. Real-Time Optimization of Drilling Parameters by Autonomous Empirical Methods. In Proceedings of the SPE/IADC Drilling Conference and Exhibition, Amsterdam, The Netherlands, 1–3 March 2009. [Google Scholar]
- Banks, S. Minimizing the Mechanical Specific Energy While Drilling Using Extremum Seeking Control. In Proceedings of the 11th International Conference on Vibration Problems, Lisbon, Portugal, 9–12 September 2013. [Google Scholar]
- Aarsnes, U.J.F.; Aamo, O.M.; Krstic, M. Extremum Seeking for Real-time Optimal Drilling Control. In Proceedings of the American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019. [Google Scholar]
- Nystad, M.; Pavlov, A. Micro-Testing While Drilling for Rate of Penetration Optimization. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Virtual, Online, 3–7 August 2020. [Google Scholar]
- Lai, S.W.; Ng, J.; Eddy, A.; Khromov, S.; Paslawski, D.; van Beurden, R.; Olesen, L.; Payette, G.S.; Spivey, B.J. Large-Scale Deployment of a Closed-Loop Drilling Optimization System: Implementation and Field Results. SPE Drill. Completion 2020. [Google Scholar] [CrossRef]
- Tan, Y.; Moase, W.H.; Manzie, C.; Nešić, D.; Mareels, I.M. Extremum seeking from 1922 to 2010. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 29–31 July 2010. [Google Scholar]
- Sui, D.; Nybø, R.; Azizi, V. Real-time optimization of rate of penetration during drilling operation. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013; pp. 357–362. [Google Scholar]
- Detournay, E.; Richard, T.; Shepherd, M. Drilling response of drag bits: Theory and experiment. Int. J. Rock Mech. Min. Sci. 2008, 45, 1347–1360. [Google Scholar] [CrossRef]
- Vogel, S.K.; Creegan, A.P. Case Study for Real Time Stick/Slip Mitigation to Improve Drilling Performance. In Proceedings of the SPE/IADC Middle East Drilling Technology Conference and Exhibition, Abu Dhabi, United Arab Emirates, 26–28 January 2016. [Google Scholar]
- Warren, T.M. Penetration Rate Performance of Roller Cone Bits. SPE Drill. Eng. 1987, 2, 9–18. [Google Scholar] [CrossRef]
- Dupriest, F.E. Comprehensive Drill Rate Management Process To Maximize ROP. In Proceedings of the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 24–27 September 2006. [Google Scholar]
- Pessier, R.C.; Fear, M.J. Quantifying Common Drilling Problems With Mechanical Specific Energy and a Bit-Specific Coefficient of Sliding Friction. In Proceedings of the SPE Annual Technical Conference and Exhibition, Washington, DC, USA, 4–7 October 1992. [Google Scholar]
- Dupriest, F.E.; Witt, J.W.; Remmert, S.M. Maximizing ROP With Real-Time Analysis of Digital Data and MSE. In Proceedings of the International Petroleum Technology Conference, Doha, Qatar, 21–23 November 2005. [Google Scholar]
- Simon, R. Energy Balance in Rock Drilling. Soc. Pet. Eng. J. 1963, 3, 298–306. [Google Scholar] [CrossRef]
- Oloruntobi, O.; Butt, S. Application of specific energy for lithology identification. J. Pet. Sci. Eng. 2020, 184. [Google Scholar] [CrossRef]
- Menand, S.; Mills, K. Use of Mechanical Specific Energy Calculation in Real-Time to Better Detect Vibrations and Bit Wear While Drilling. In Proceedings of the AADE National Technical Conference and Exhibition, Houston, TX, USA, 11–12 April 2017. [Google Scholar]
- Yau, H.-T.; Lin, C.-J.; Wu, C.-H. Sliding Mode Extremum Seeking Control Scheme Based on PSO for Maximum Power Point Tracking in Photovoltaic Systems. Int. J. Photoenergy 2013, 2013. [Google Scholar] [CrossRef]
- Ariyur, K.B.; Krstić, M. Real-Time Optimization by Extremum Seeking Control; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003. [Google Scholar] [CrossRef]
- Tan, Y.; Nešić, D.; Mareels, I. On the Choice of Dither in Extremum Seeking Systems: A Case Study. Automatica 2008, 44, 1446–1450. [Google Scholar] [CrossRef]
- Payette, G.S.; Spivey, B.J.; Wang, L.; Bailey, J.R.; Sanderson, D.; Kong, R.; Pawson, M.; Eddy, A. A Real-Time Well-Site Based Surveillance and Optimization Platform for Drilling: Technology, Basic Workflows and Field Results. In Proceedings of the SPE/IADC Drilling Conference and Exhibition, The Hague, The Netherlands, 14–16 March 2017. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Tuning Considerations |
|---|---|
| Excitation amplitude, A |
|
| Excitation period, P |
|
| Adaptation rate, γ |
|
| k parameter |
|
| Parameter | Fm. A Value | Fm. B Value | Units |
|---|---|---|---|
| Parameter | Value | Units |
|---|---|---|
| 12 ¼ | Inches | |
| 2.5 | kg/s | |
| 200 | kg | |
| 0.001 | MPa/kg | |
| 0.002 | MPa/kg | |
| 120 | s | |
| 4 | s | |
| 0.02 | rpm/s | |
| 2 | rpm | |
| 0.05 | MPa/rpm | |
| 0.1 | MPa/rpm | |
| 60 | s | |
| 3 | s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nystad, M.; Aadnøy, B.S.; Pavlov, A. Real-Time Minimization of Mechanical Specific Energy with Multivariable Extremum Seeking. Energies 2021, 14, 1298. https://doi.org/10.3390/en14051298
Nystad M, Aadnøy BS, Pavlov A. Real-Time Minimization of Mechanical Specific Energy with Multivariable Extremum Seeking. Energies. 2021; 14(5):1298. https://doi.org/10.3390/en14051298
Chicago/Turabian StyleNystad, Magnus, Bernt Sigve Aadnøy, and Alexey Pavlov. 2021. "Real-Time Minimization of Mechanical Specific Energy with Multivariable Extremum Seeking" Energies 14, no. 5: 1298. https://doi.org/10.3390/en14051298
APA StyleNystad, M., Aadnøy, B. S., & Pavlov, A. (2021). Real-Time Minimization of Mechanical Specific Energy with Multivariable Extremum Seeking. Energies, 14(5), 1298. https://doi.org/10.3390/en14051298