
Finite Set Model Predictive Control of a Dual-Motor Torque Synchronization System Fed by an Indirect Matrix Converter




Abstract
:
1. Introduction
2. Closed-Loop Control Strategy for Dual-Motor Torque Synchronization System Fed by an IMC
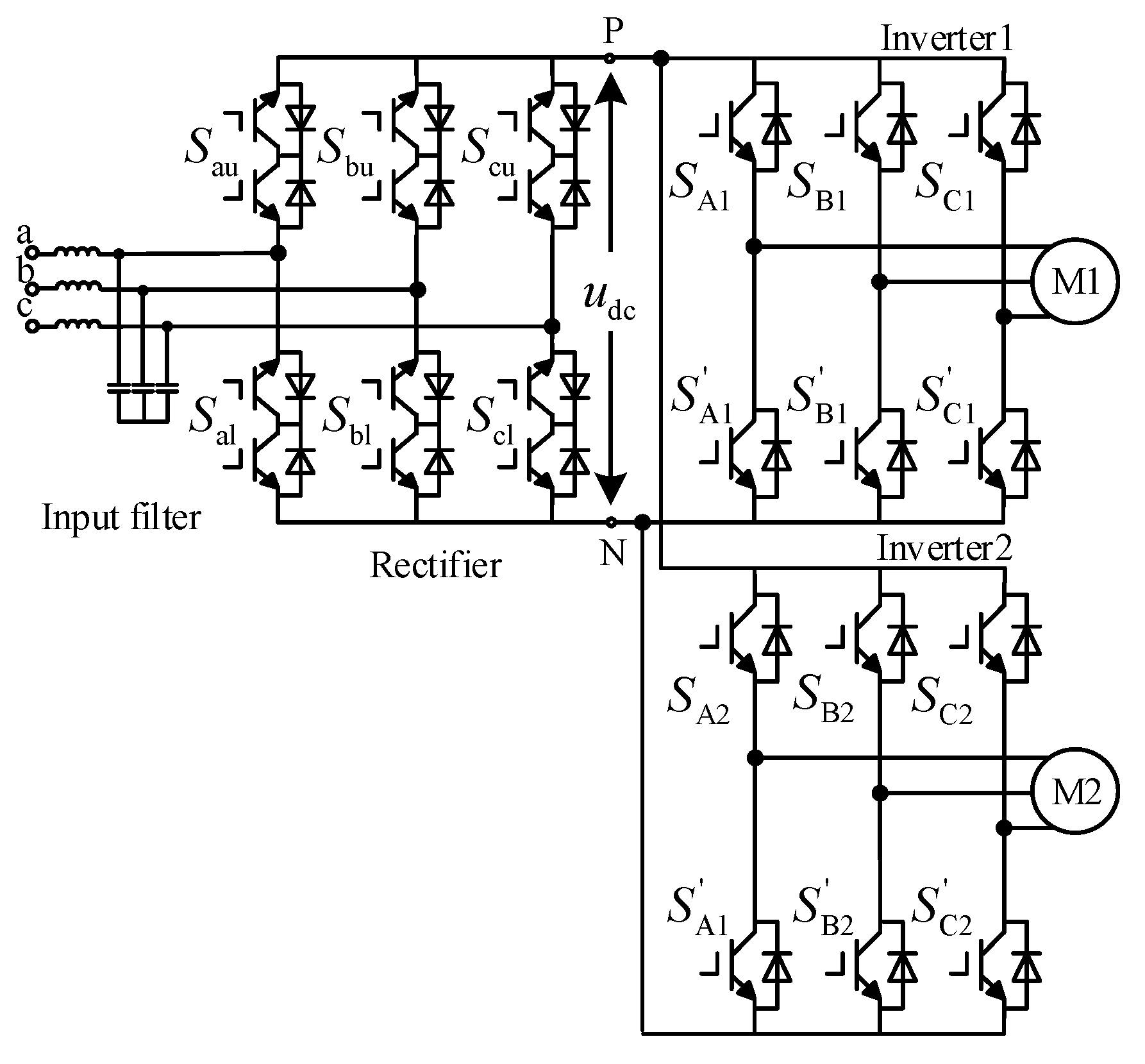
2.1. Topology of Dual-Motor System Fed by an IMC
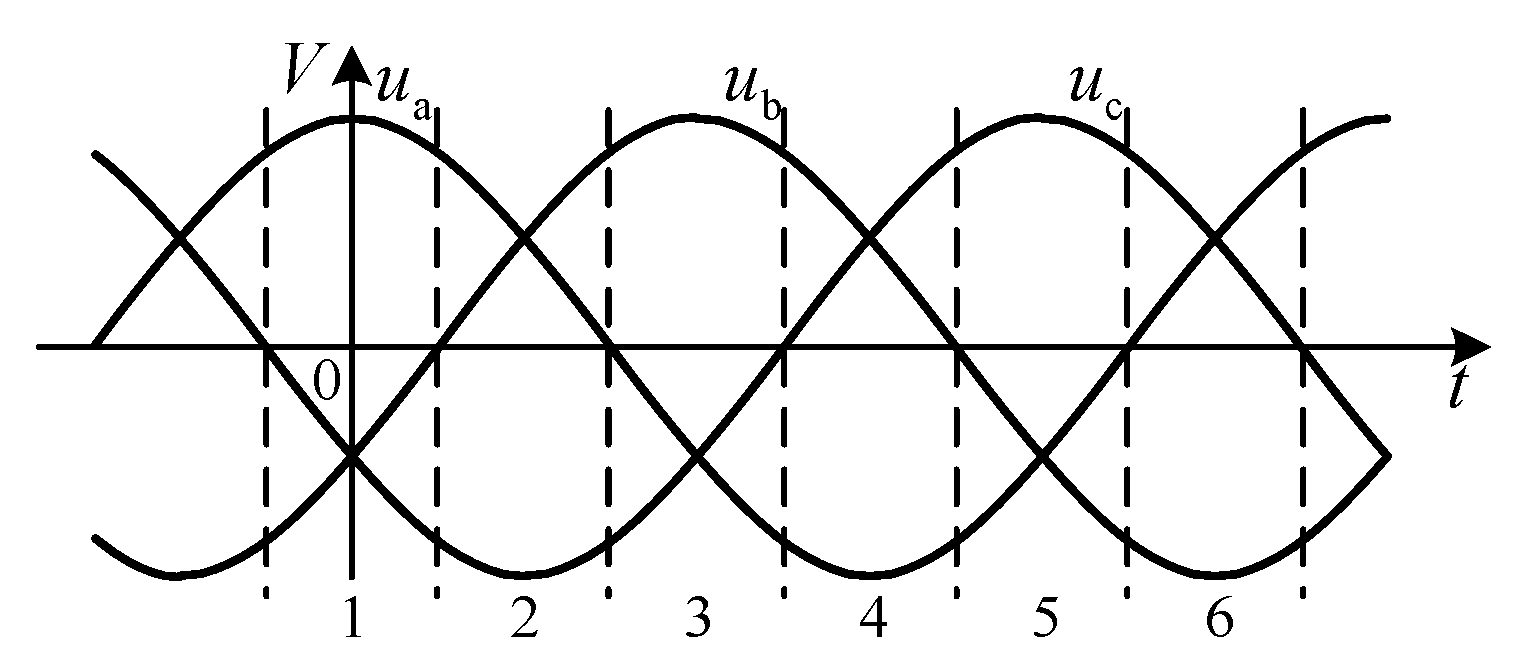
2.2. Space Vector Modulation Strategy for Rectifier Stage
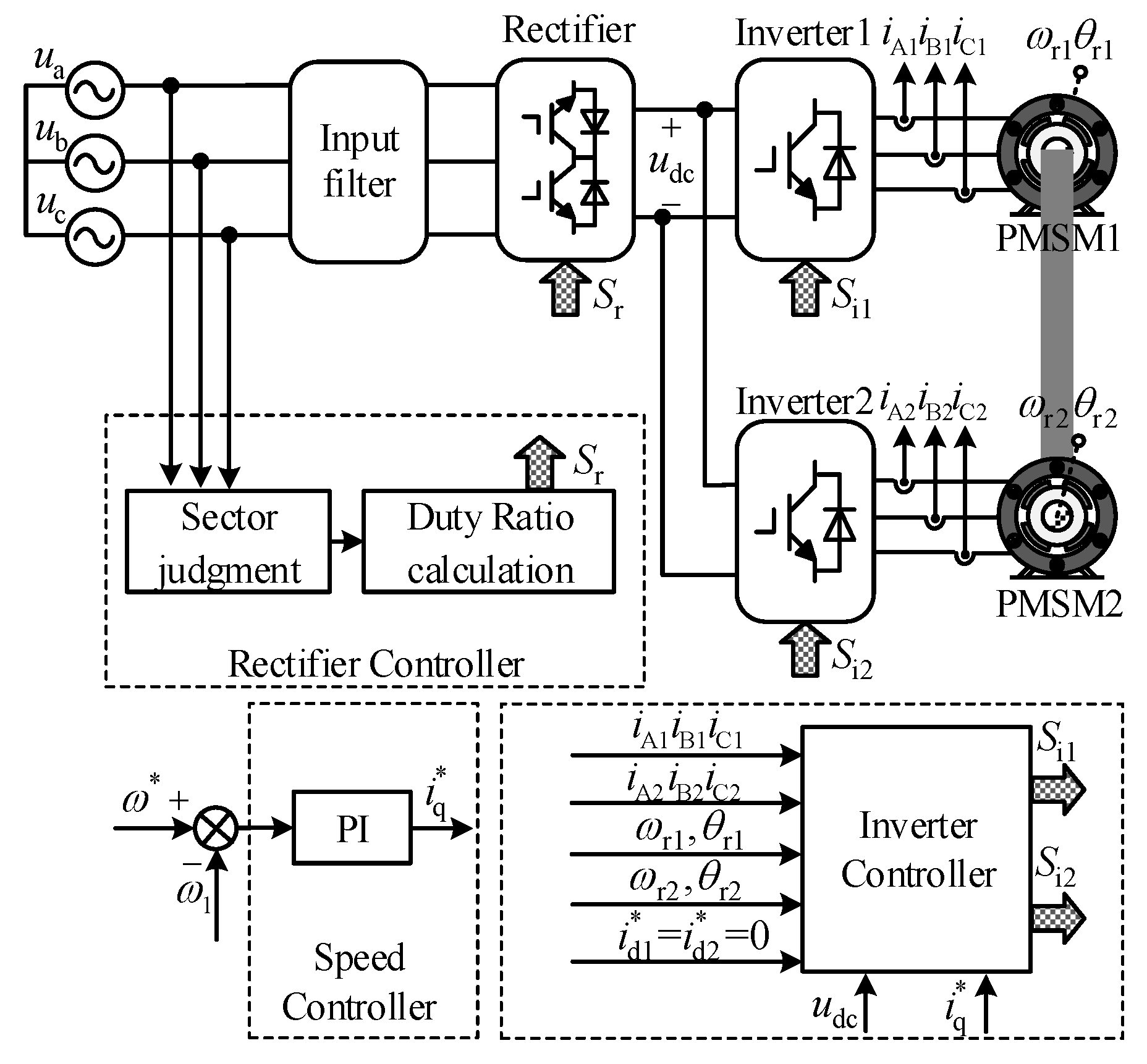
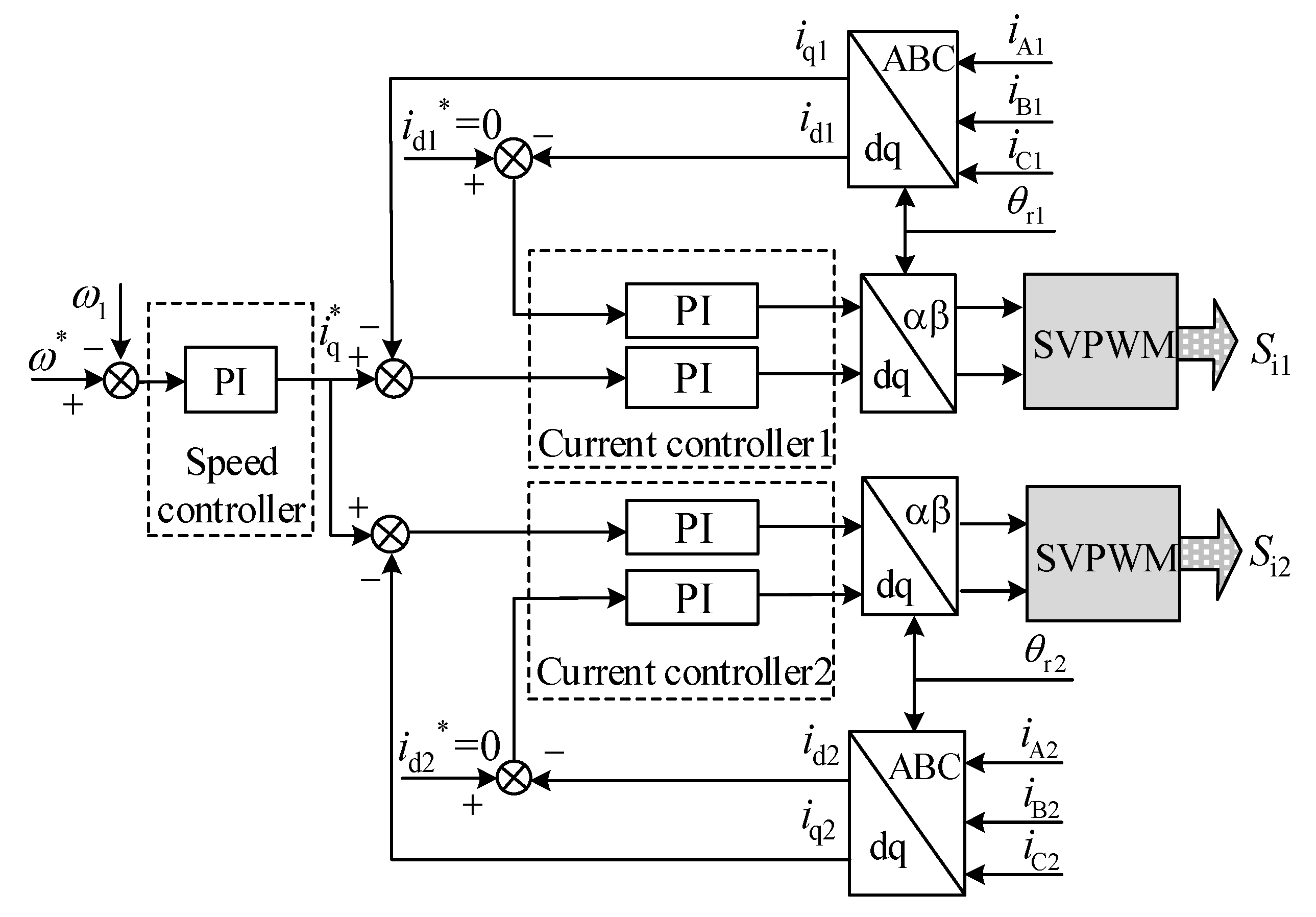
2.3. Closed-Loop Control Strategy Based on Master-Slave Structure
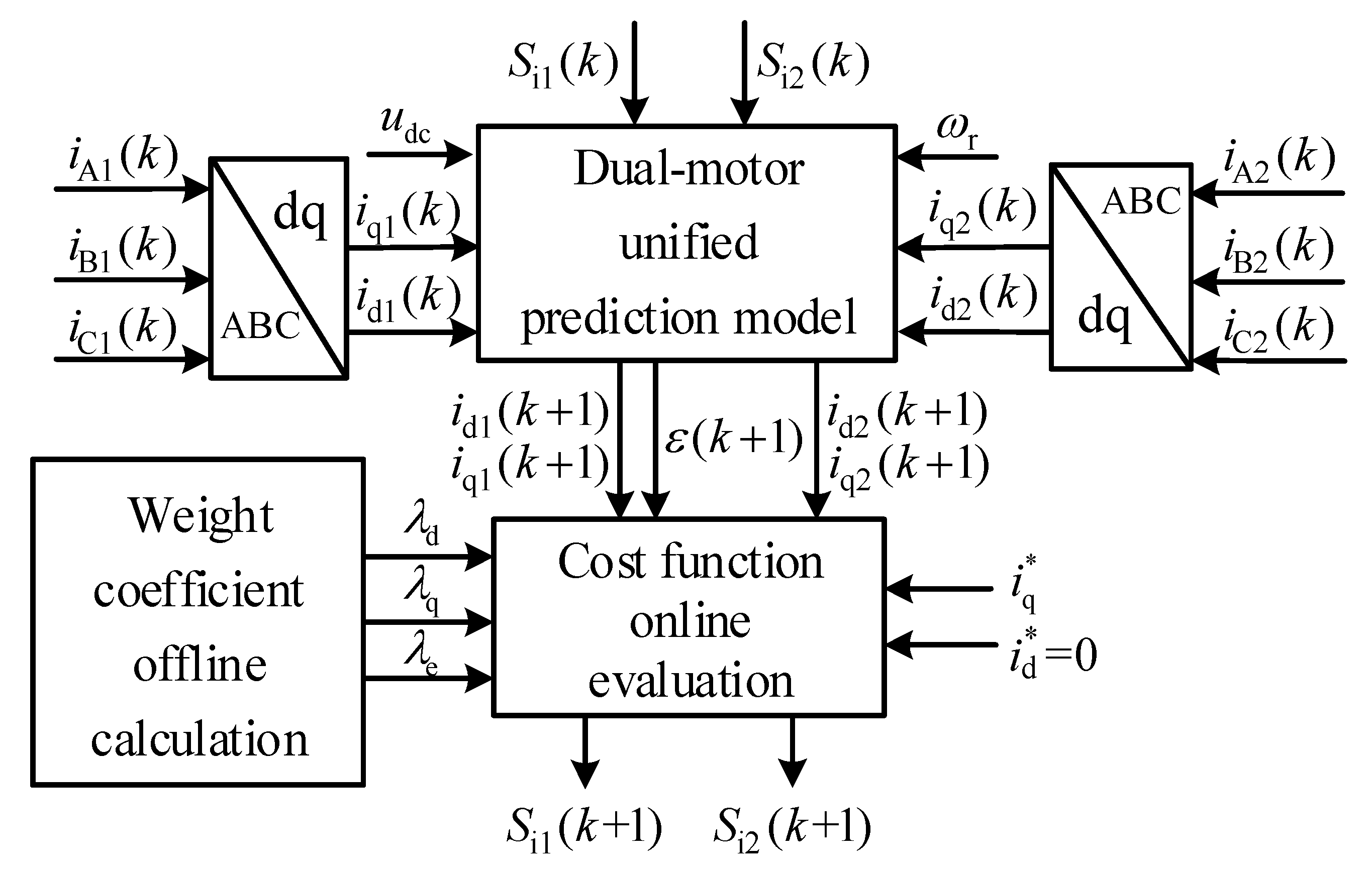
3. FCS-MPC Strategy for Dual-Motor Torque Synchronization System Fed by an IMC
3.1. Unified Prediction Model of Dual-Motor
3.2. Cost Function of FCS-MPC Strategy
3.3. Auxiliary Diagonal Matrix
3.4. Diagonal Matrix Offline Algorithm
4. Simulation Results
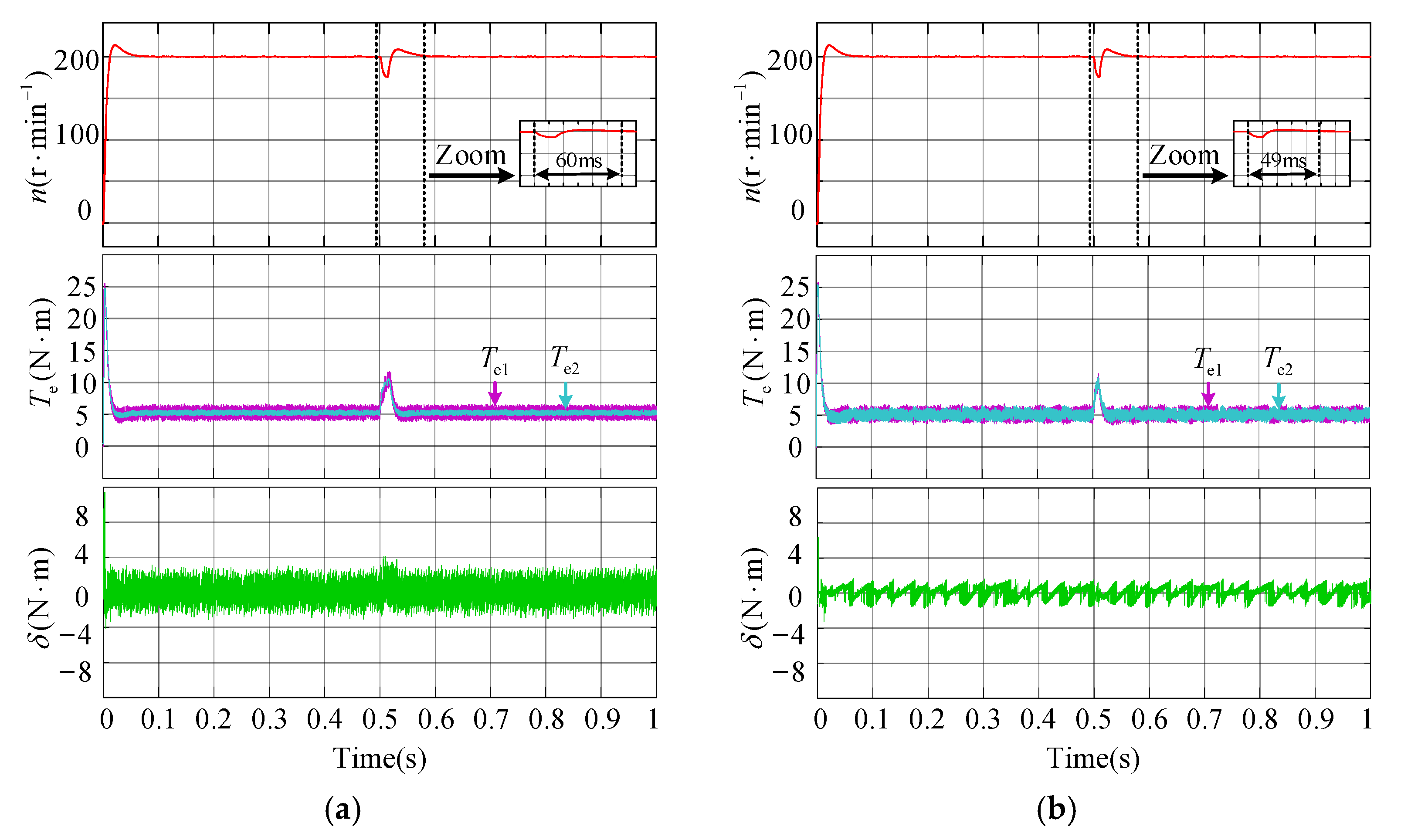
4.1. Simulation Results without Parameter Deviation
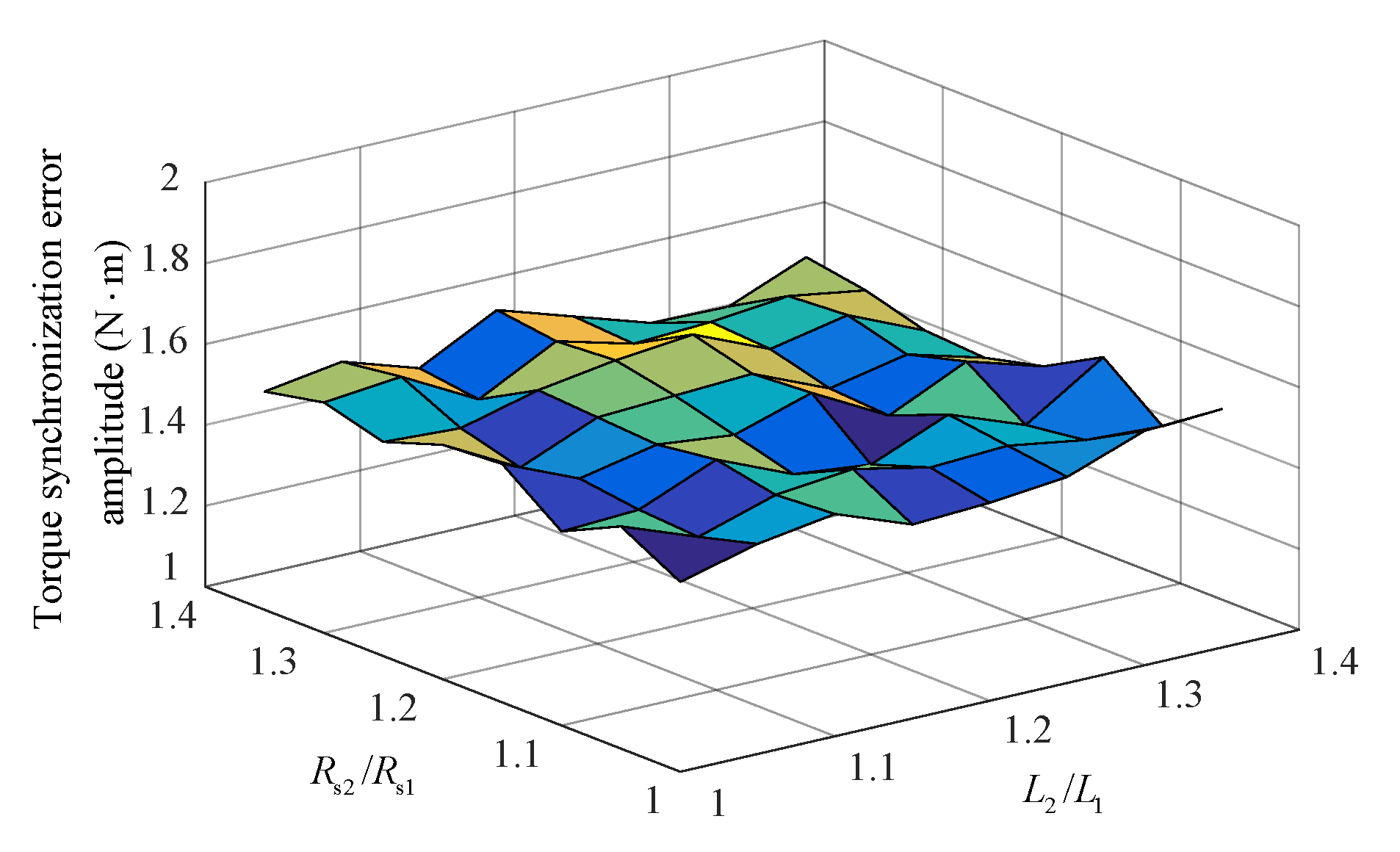
4.2. Simulation Results with Parameter Deviation
5. Experimental Results
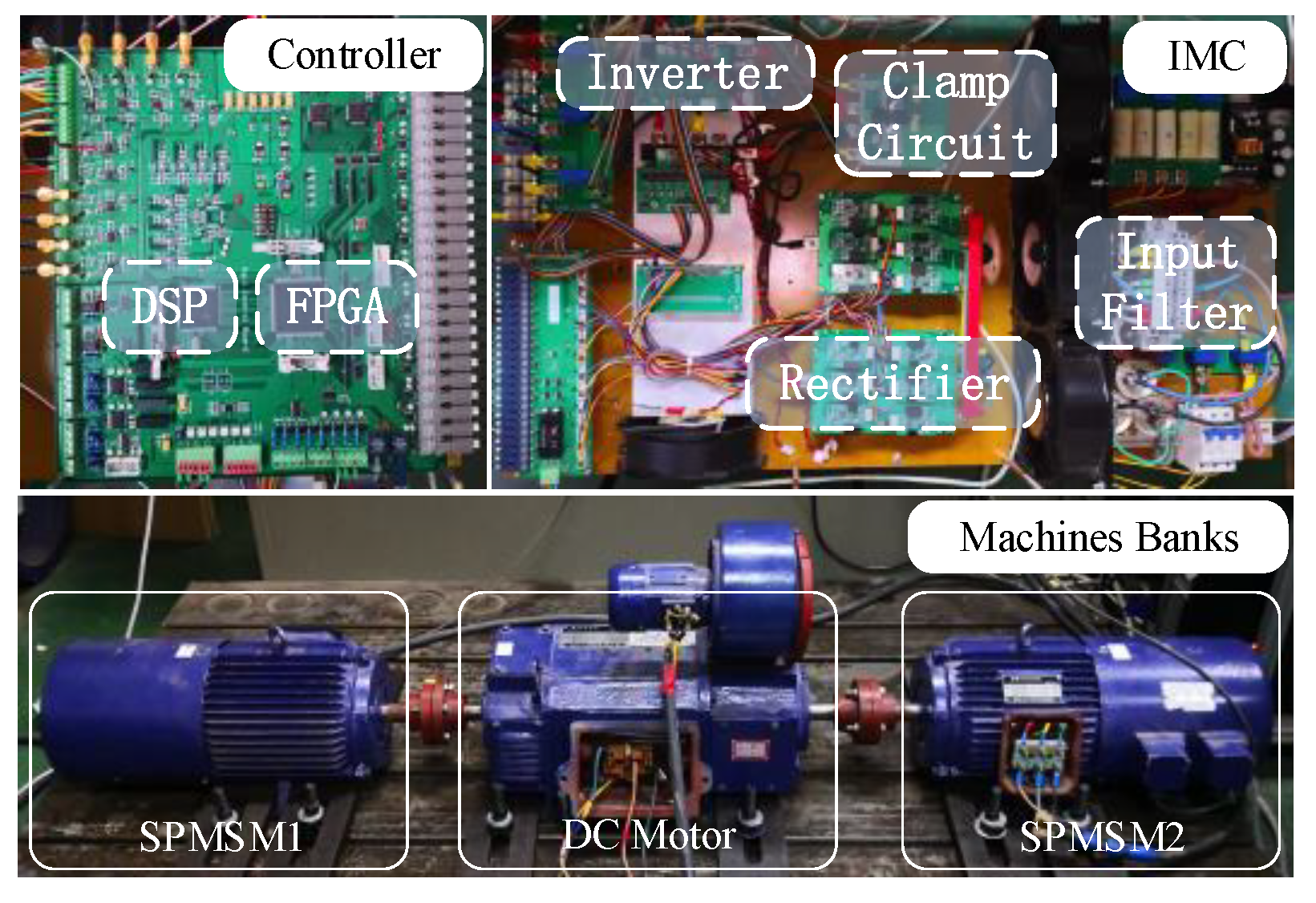
5.1. Experimental Platform
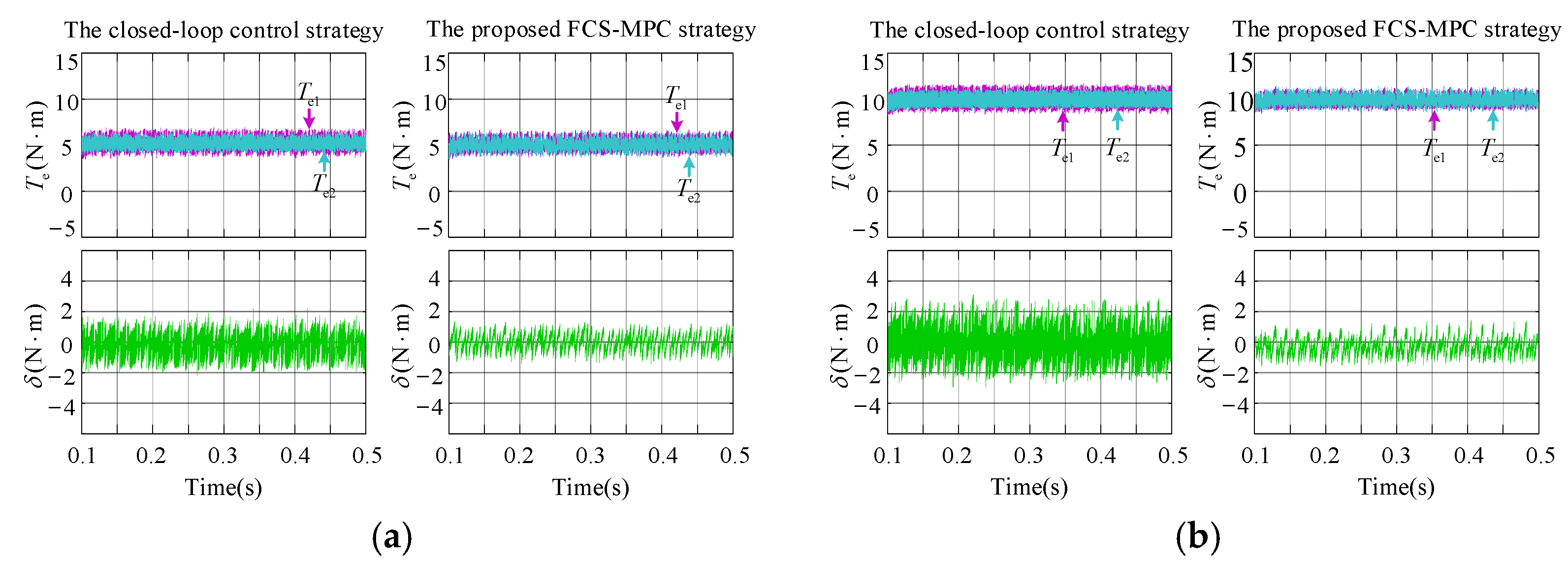
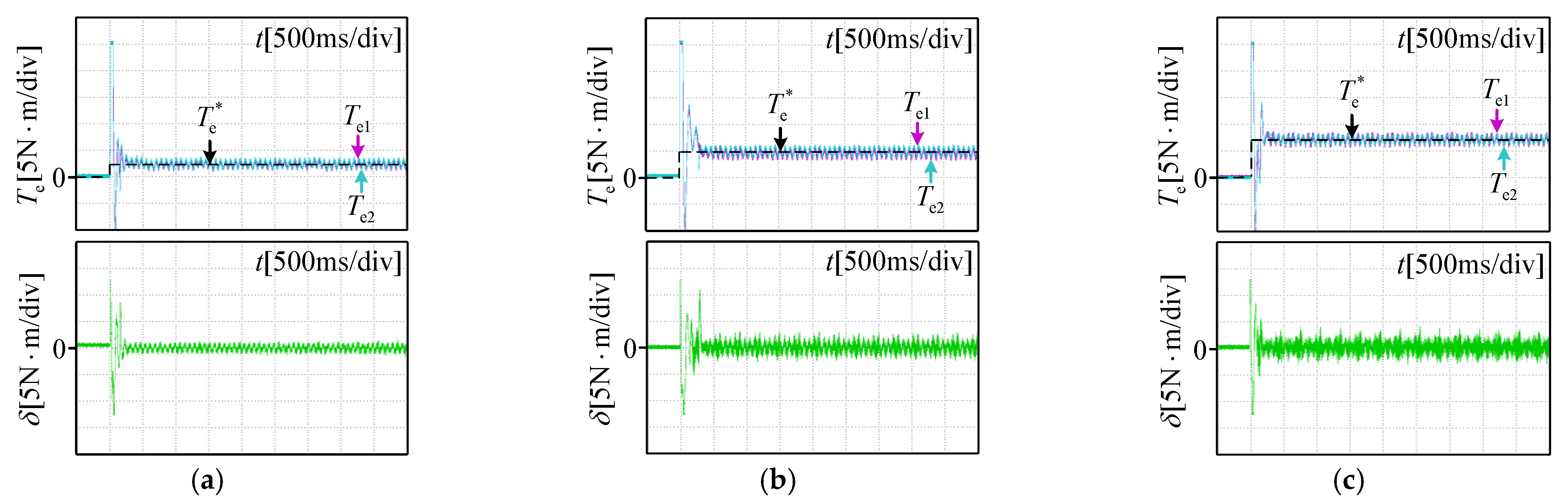
5.2. Steady State Performance Comparison Experiments
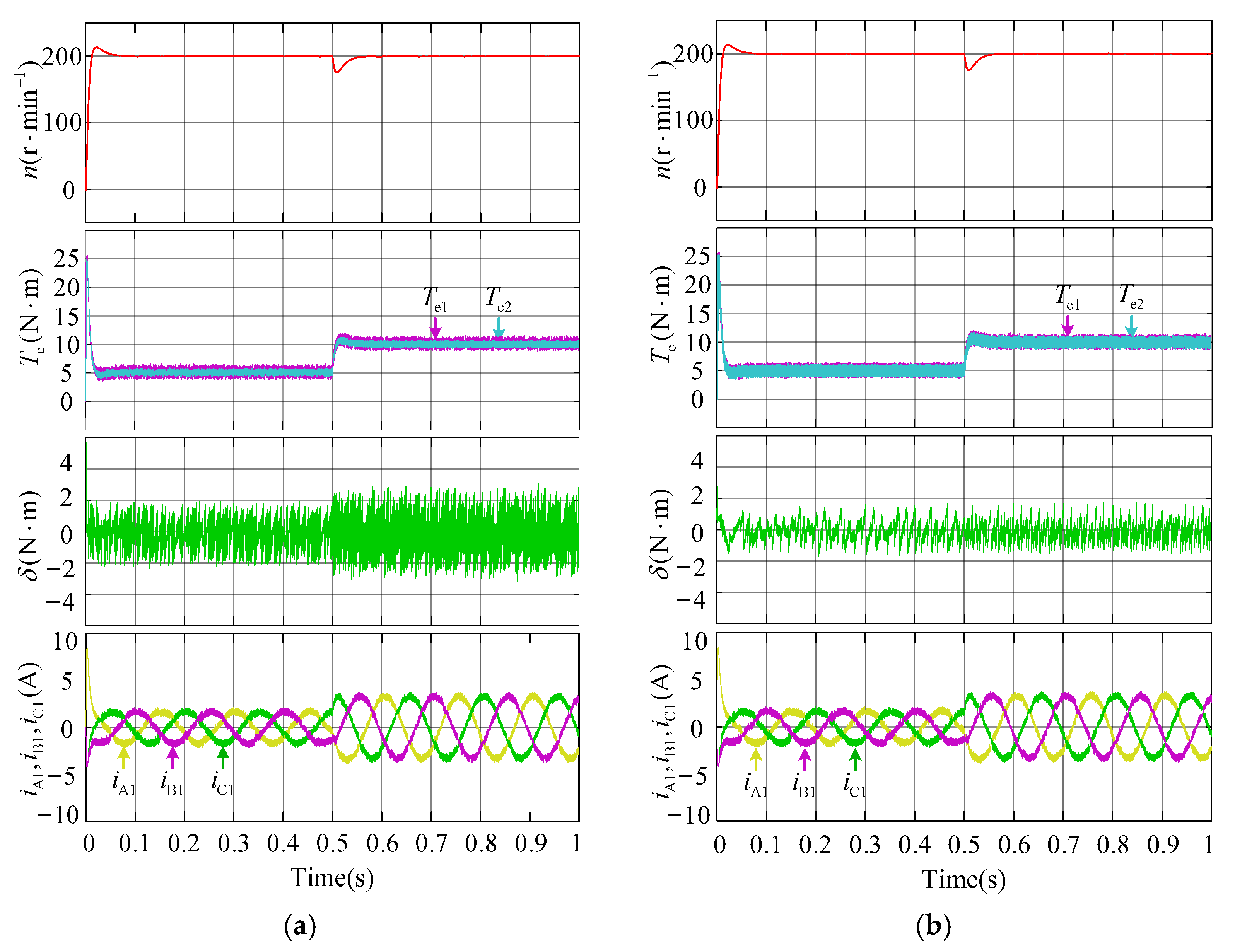
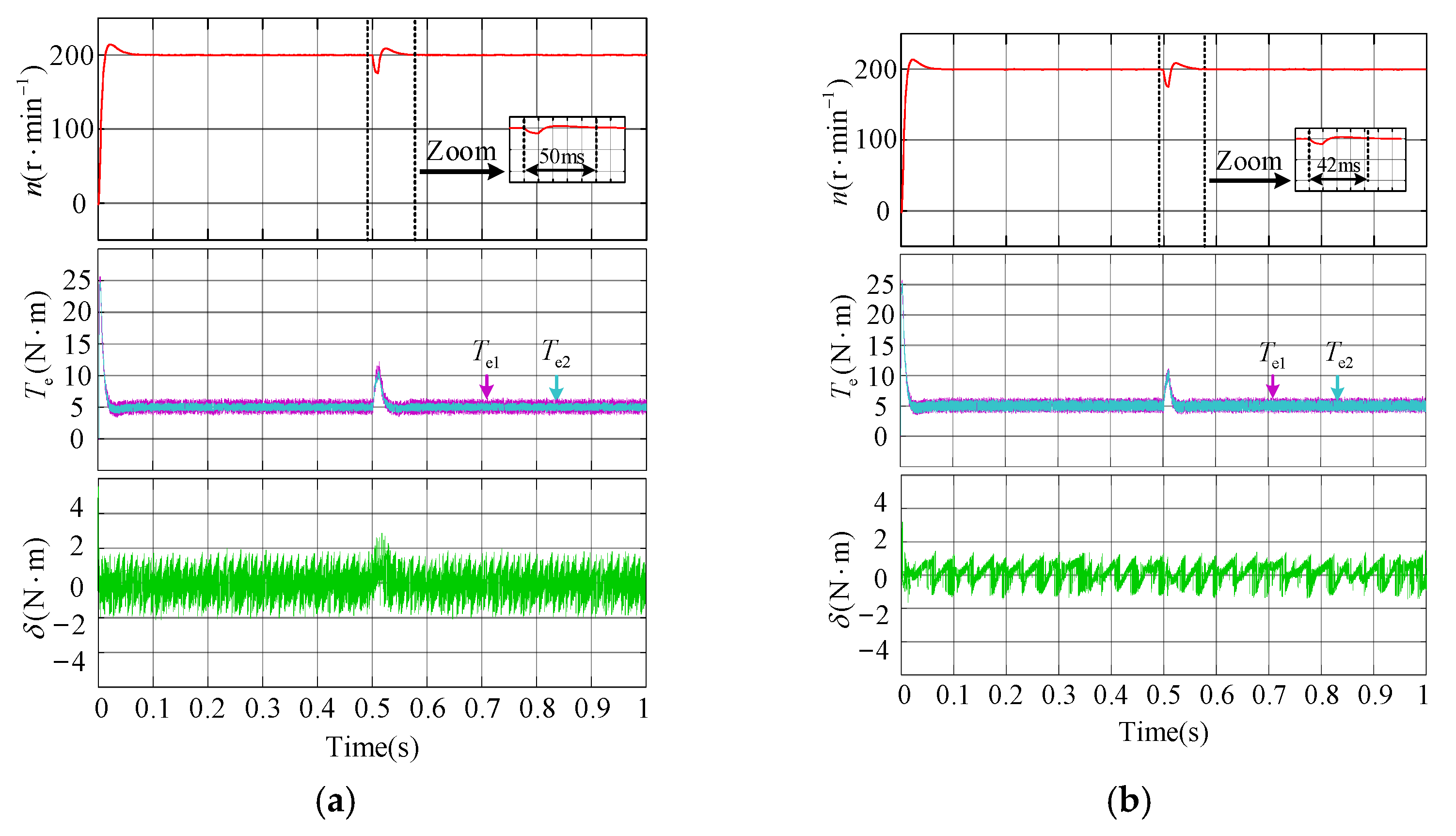
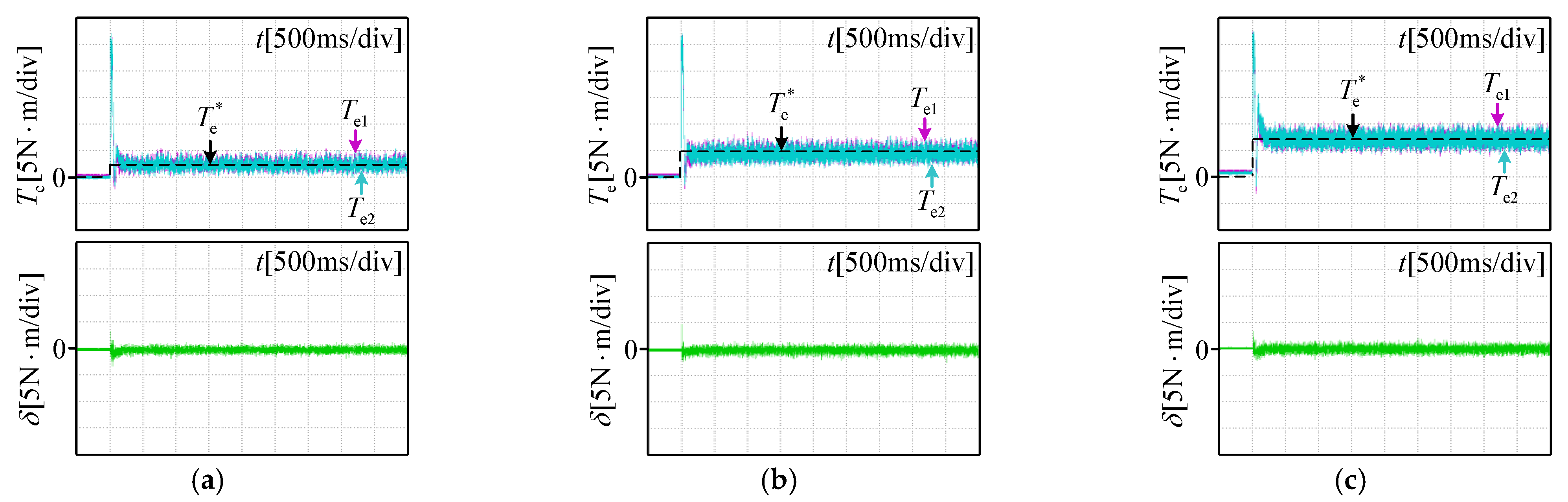
5.3. Dynamic Performance Comparison Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lopez, M.; Rodriguez, J.; Silva, C.; Rivera, M. Predictive Torque Control of a Multidrive System Fed by a Dual Indirect Matrix Converter. IEEE Trans. Ind. Electron. 2015, 62, 2731–2741. [Google Scholar] [CrossRef]
- Bak, Y.; Lee, E.; Lee, K.-B. Indirect Matrix Converter for Hybrid Electric Vehicle Application with Three-Phase and Single-Phase Outputs. Energies 2015, 8, 3849–3866. [Google Scholar] [CrossRef]
- Kumar, D.; Wheeler, P.W.; Clare, J.C.; Kim, T.-W. Weight/volume effective multi-drive system based on two-stage matrix converter. In Proceedings of the Industrial Electronics Conference, Orlando, FL, USA, 10–13 November 2008; pp. 2782–2787. [Google Scholar]
- Kumar, D.; Wheeler, P.; Clare, J.; De Lillo, L. Experimental evolution of the multi-drive system based on two-stage direct power converter topology. In Proceedings of the 14th International Power Electronics and Motion Control Conference, Ohrid, North Macedonia, 6–8 September 2010; pp. T5204–T5212. [Google Scholar]
- Lucia, O.; Carretero, C.; Burdio, J.M.; Acero, J.; Almazan, F. Multiple-output resonant matrix converter for multiple induction heaters. IEEE Trans. Ind. Appl. 2012, 48, 1387–1396. [Google Scholar] [CrossRef]
- Chen, W.; Liu, X.; Shi, T.N.; Xia, C.L. Generalized predictive cross-coupling position control of biaxial motion system. Control Theory Appl. 2018, 35, 399–406. [Google Scholar]
- Chen, Z.; He, J.; Zheng, Y.; Song, T.; Deng, Z. An optimized feedforward decoupling PD register control method of roll-to-roll web printing systems. IEEE Trans. Autom. Control. 2016, 13, 274–283. [Google Scholar] [CrossRef]
- Jin, Y.S.; Xu, Y.X.; Wang, Q.; Hu, J.H. Research on torque balance control of multi-motor based on master-slave control structure. Micromotors 2016, 49, 58–61. [Google Scholar]
- Deng, Z.; Nian, X. Robust control of two parallel-connected permanent magnet synchronous motors fed by a single inverter. IET Power Electron. 2016, 9, 2833–2845. [Google Scholar] [CrossRef]
- Kumar, D.; Wheeler, P.W.; Clare, J.C. A multi-drive system based on direct power converter. In Proceedings of the 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009. [Google Scholar]
- Mei, Y.; Chang, N.Q.; Li, Z.X. Research on high performance speed regulating system of multi-machine drive based on indirect matrix converter. Micromotors 2012, 45, 56–60. [Google Scholar]
- Ahmed, A.A.; Koh, B.K.; Park, H.S.; Lee, K.-B.; Lee, Y.I. Finite-Control Set Model Predictive Control Method for Torque Control of Induction Motors Using a State Tracking Cost Index. IEEE Trans. Ind. Electron. 2017, 64, 1916–1928. [Google Scholar] [CrossRef]
- Shi, T.N.; Zhang, B.J.; Liu, T.; Wei, Y.C.; Xia, C.L. The optimal modulation strategy of dual permanent magnet synchronous motor driven by five-bridge arm inverter. Proc. Chin. Soc. Electr. Eng. 2015, 35, 1498–1507. [Google Scholar]
- Siami, M.; Khaburi, D.A.; Rodriguez, J. Simplified finite control set-model predictive control for matrix converters-fed PMSM drives. IEEE Trans. Ind. Electron. 2018, 33, 2438–2446. [Google Scholar] [CrossRef]
- Xiao, X.; Wang, J.X.; Zhang, Y.J.; Hao, C. An optimized master-slave model predictive direct torque control scheme for the dual motor. Trans. China Electrotech. Soc. 2018, 33, 5720–5730. [Google Scholar]
- Davari, S.A.; Khaburi, D.A.; Kennel, R. Using a weighting factor table for FCS-MPC of induction motors with extended prediction horizon. In Proceedings of the 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 2086–2091. [Google Scholar]
- Gu, X.; Jiang, B.; Geng, Q.; Liu, T. Model predictive control of dual permanent magnet synchronous motor bridge arm converter. Adv. Technol. Electr. Eng. Energy 2015, 34, 25–30. [Google Scholar]
- Wróbel, K.; Serkies, P.; Szabat, K. Model Predictive Base Direct Speed Control of Induction Motor Drive—Continuous and Finite Set Approaches. Energies 2020, 13, 1193. [Google Scholar] [CrossRef] [Green Version]
- Lim, C.; Levi, E.; Jones, M.; Rahim, N.A.; Hew, W.P. A comparative study of synchronous current control schemes based on FCS-MPC and PI-PWM for a two-motor three-phase drive. IEEE Trans. Ind. Electron. 2014, 61, 3867–3878. [Google Scholar] [CrossRef] [Green Version]
- Davari, S.A.; Khaburi, D.A.; Kennel, R. An improved FCS–MPC algorithm for an induction motor with an imposed optimized weighting factor. IEEE Trans. Ind. Electron. 2012, 27, 1540–1551. [Google Scholar] [CrossRef]
- Shi, T.N.; Yang, Y.Y.; Zhou, Z.Q.; Geng, Q.; Xia, C.L. FCS-MPC for dual-motor torque synchronization system based on quadratic form cost function. Proc. Chin. Soc. Electr. Eng. 2019, 39, 4531–4541. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector | Smn | Duty Ratio | Smn | Duty Ratio |
|---|---|---|---|---|
| 1 | Sau Sbl | −ub/ua | Sau Scl | −uc/ua |
| 2 | Sbu Scl | −ub/uc | Sau Scl | −ua/uc |
| 3 | Sbu Scl | −uc/ub | Sbu Sal | −ua/ub |
| 4 | Scu Sal | −uc/ua | Sbu Sal | −ub/ua |
| 5 | Scu Sal | −ua/uc | Scu Sbl | −ub/uc |
| 6 | Sau Sbl | −ua/ub | Scu Sbl | −uc/ub |
| Variables | Description | Values |
|---|---|---|
| PN | Rated power | 4 kW |
| J | Inertia | 0.0065 kg·m2 |
| nN | Rated speed | 1500 r/min |
| L | Inductance | 19.85 mH |
| R | Resistance | 0.929 Ω |
| ψf | Flux linkage | 1.0267 Wb |
| p | Pole | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Wang, Z.; Yan, Y.; Shi, T. Finite Set Model Predictive Control of a Dual-Motor Torque Synchronization System Fed by an Indirect Matrix Converter. Energies 2021, 14, 1325. https://doi.org/10.3390/en14051325
Li S, Wang Z, Yan Y, Shi T. Finite Set Model Predictive Control of a Dual-Motor Torque Synchronization System Fed by an Indirect Matrix Converter. Energies. 2021; 14(5):1325. https://doi.org/10.3390/en14051325
Chicago/Turabian StyleLi, Shujing, Zewen Wang, Yan Yan, and Tingna Shi. 2021. "Finite Set Model Predictive Control of a Dual-Motor Torque Synchronization System Fed by an Indirect Matrix Converter" Energies 14, no. 5: 1325. https://doi.org/10.3390/en14051325