
Development of Three-Phase Permanent-Magnet Synchronous Motor Drive with Strategy to Suppress Harmonic Current


Abstract
:1. Introduction
2. Current and Torque Ripples of Permanent-Magnet Synchronous Motors
3. Current Harmonic Improvement Strategy for Closed-Loop Control of Current along q-Axis and d-Axis
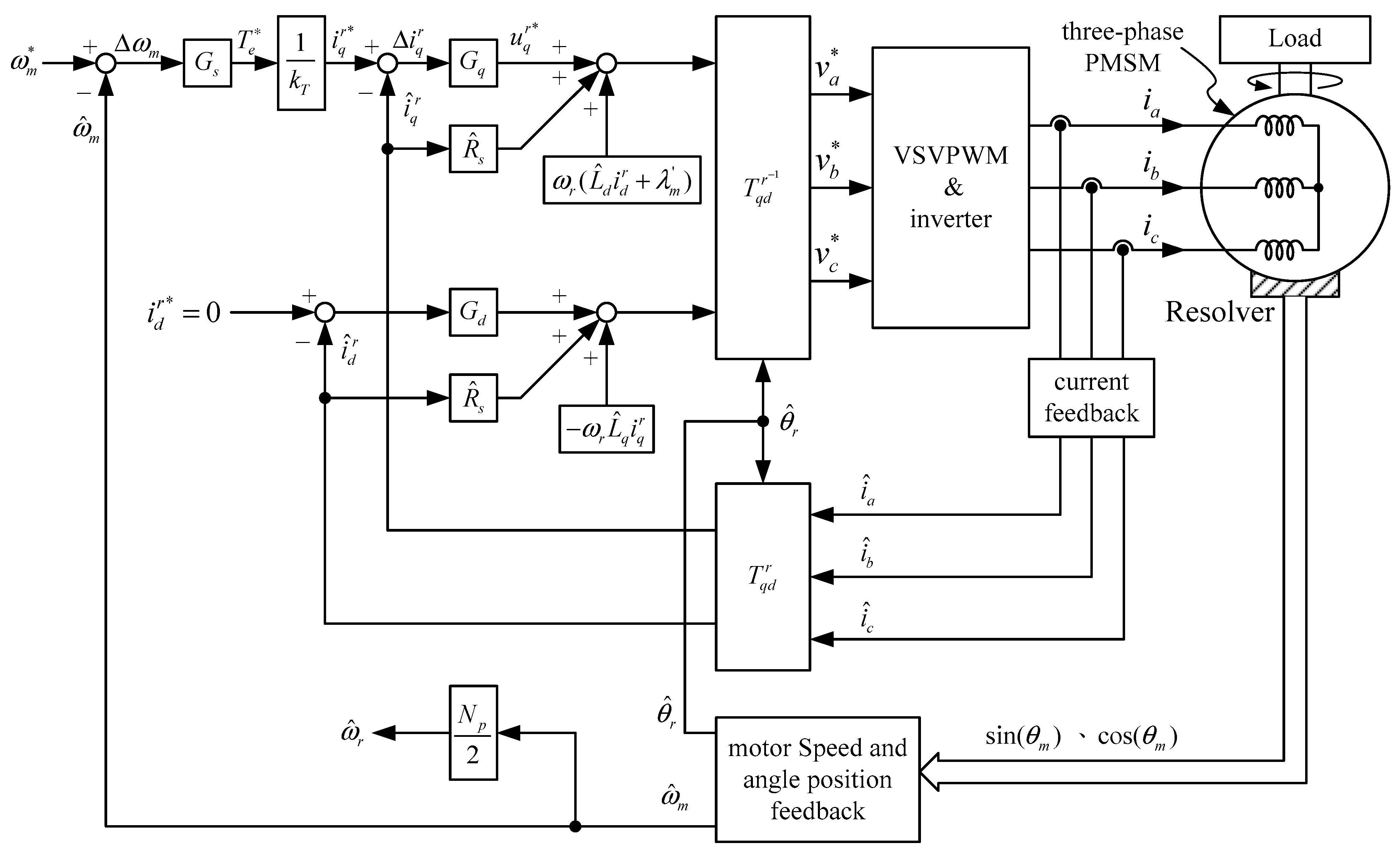
3.1. Closed-Loop Control Strategy for q-Axis and d-Axis Currents with Compensation for Fundamental Wave of Induced EMF
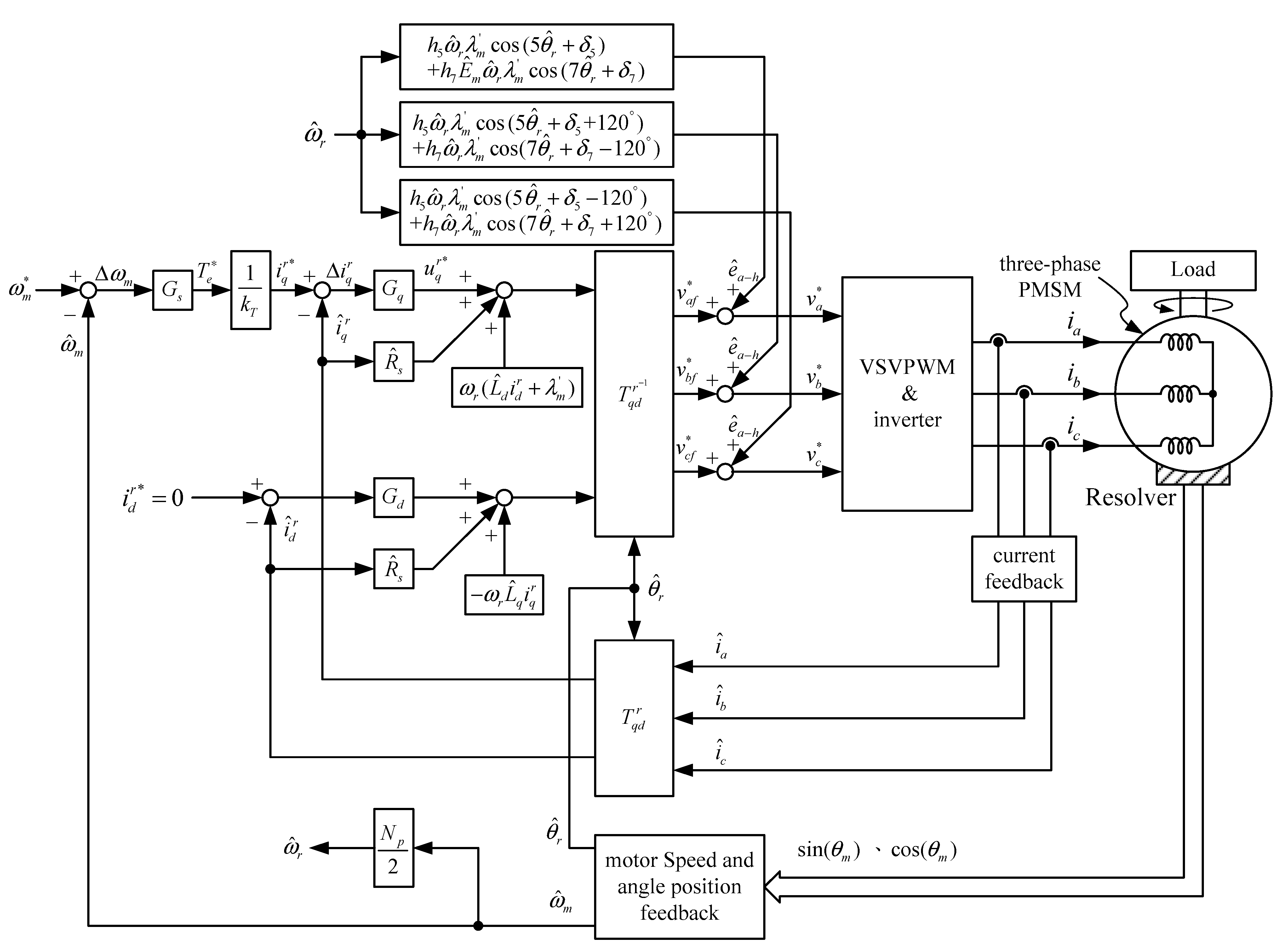
3.2. Compensation Method of Induced EMF Harmonics along Phase-a, Phase-b, and Phase-c
3.3. Compensation Method of Induced EMF Harmonics along q-Axis and d-Axis
4. Measurement Results
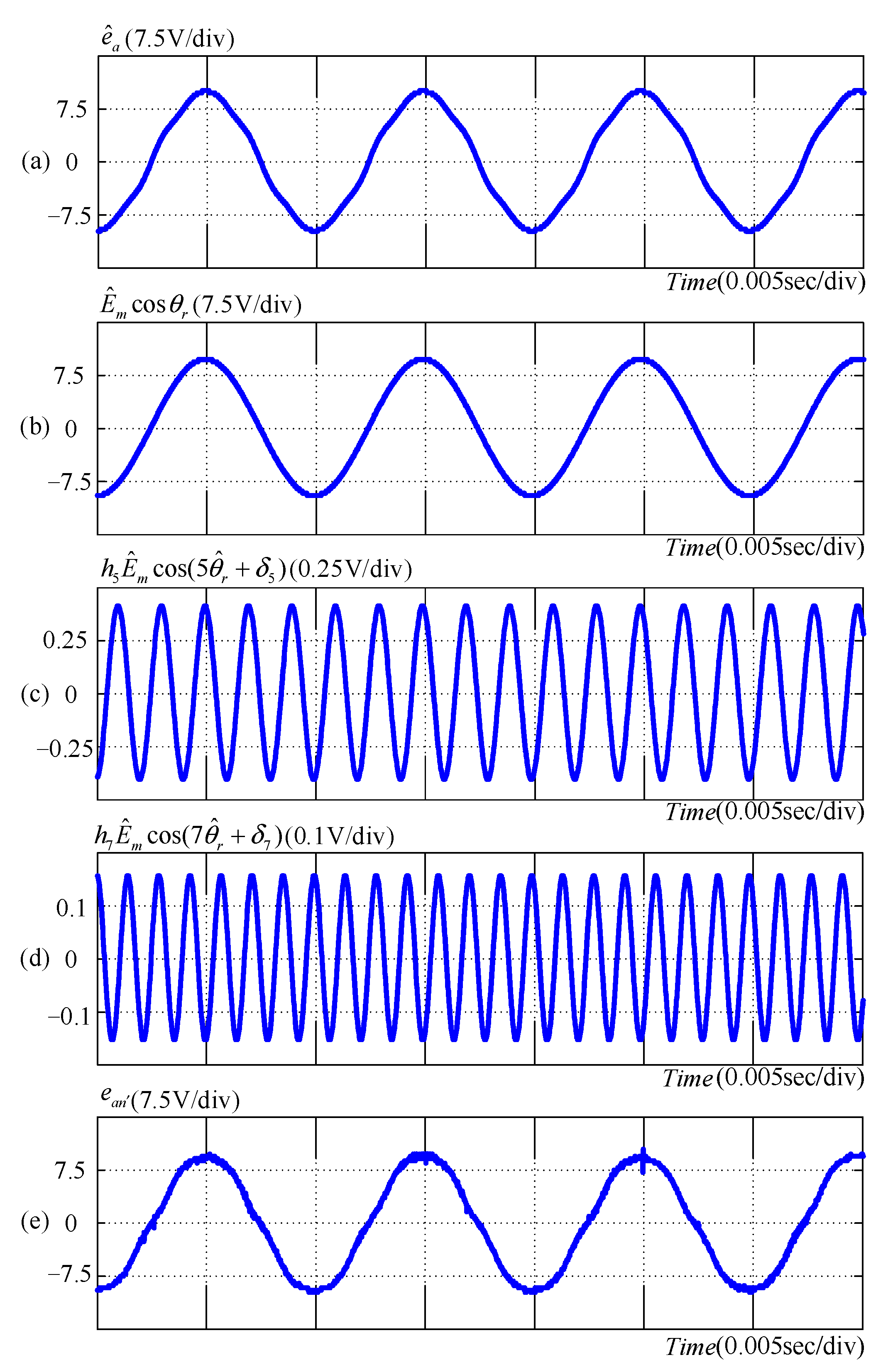
4.1. Measurement of Induced EMF
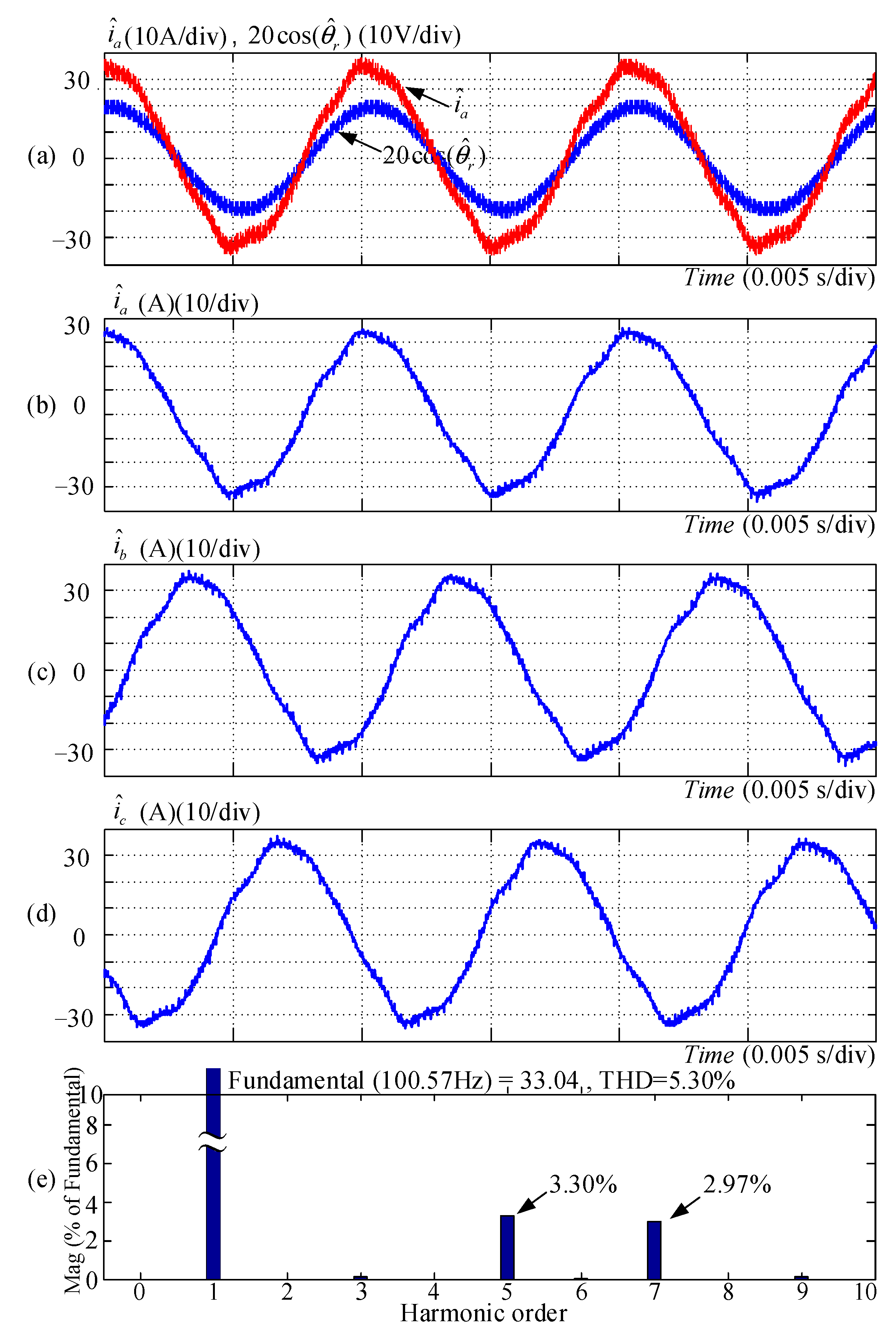
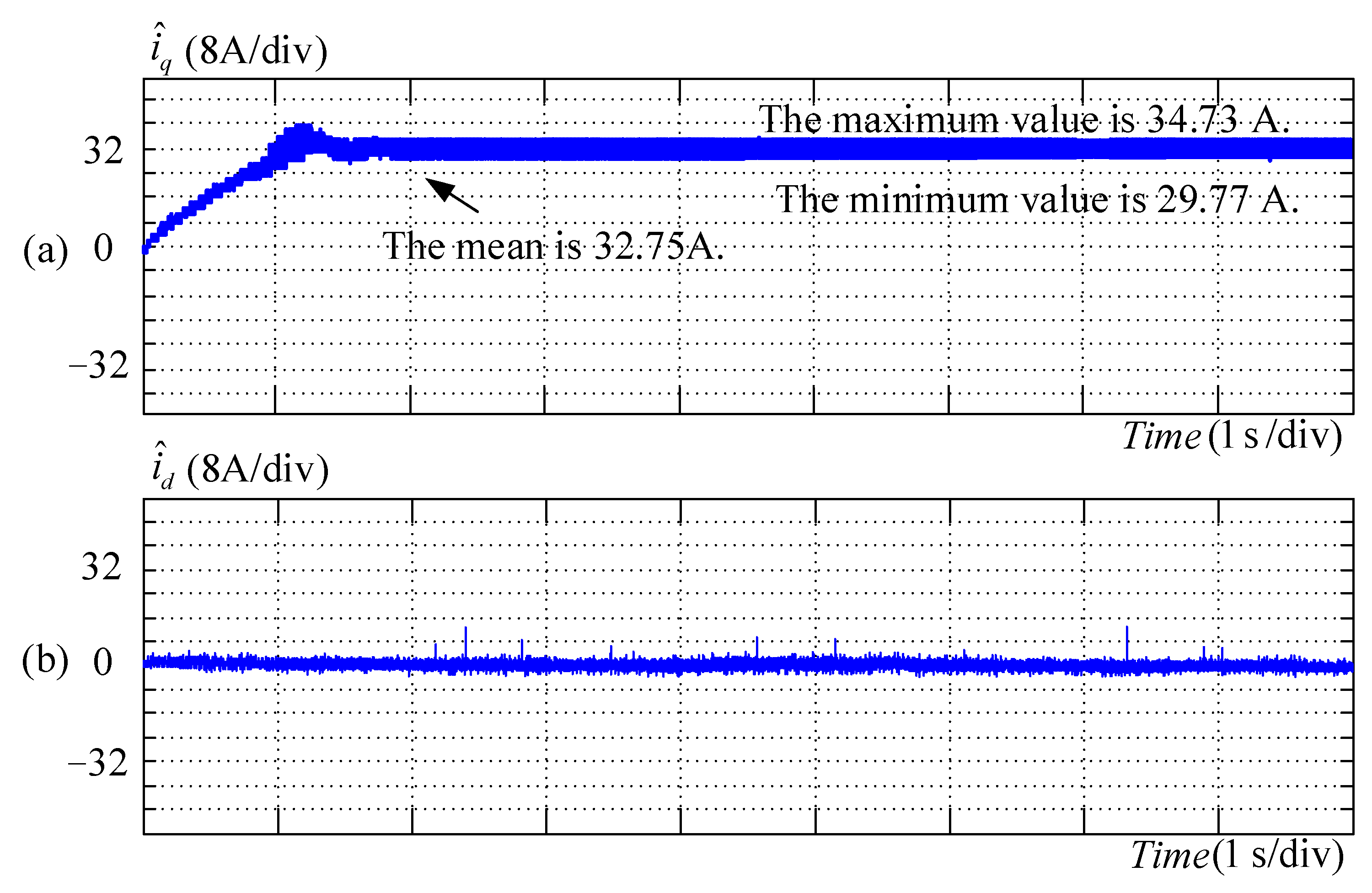
4.2. Measured Results of Induced EMF without Compensation for Harmonic Components
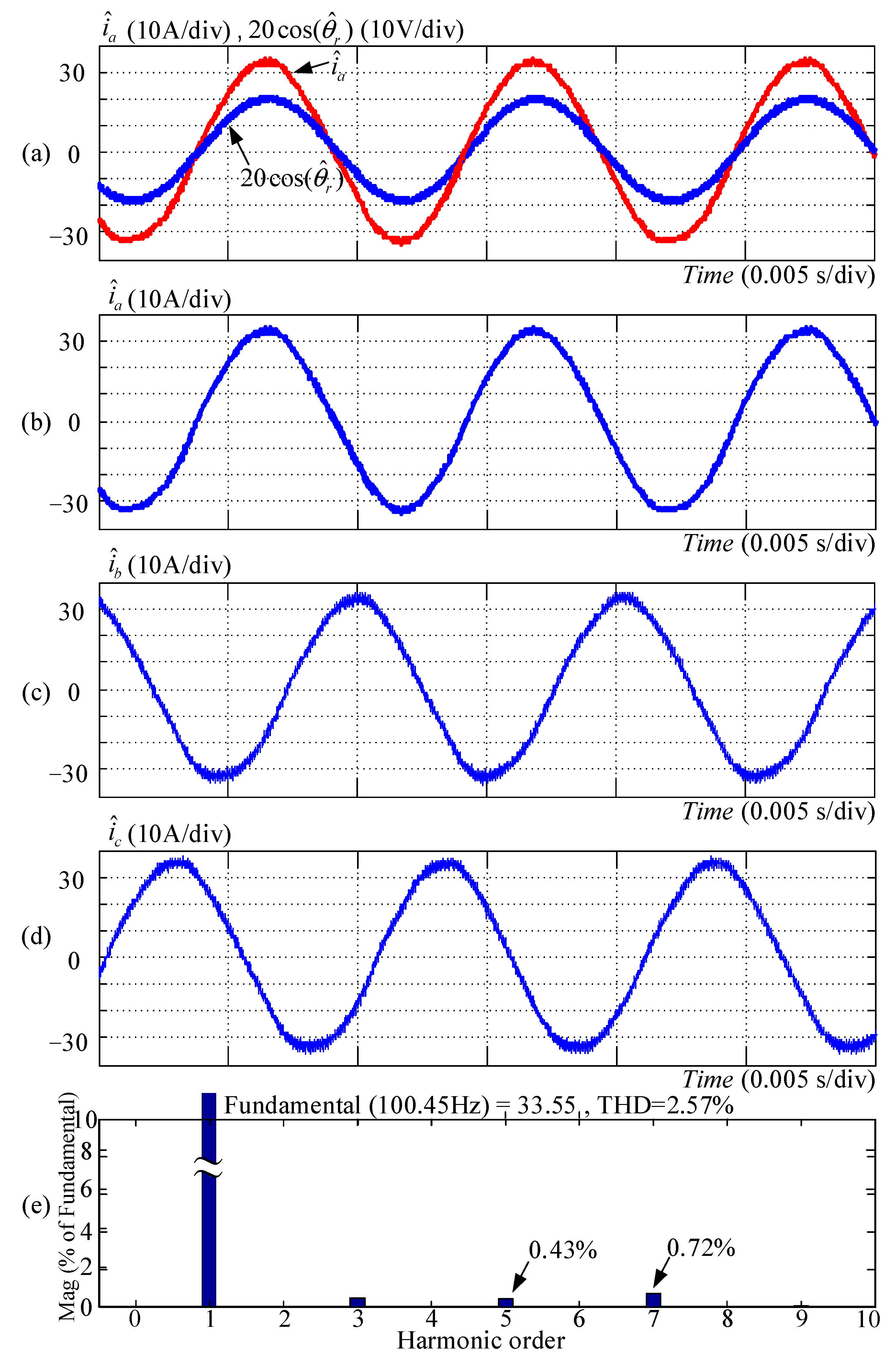
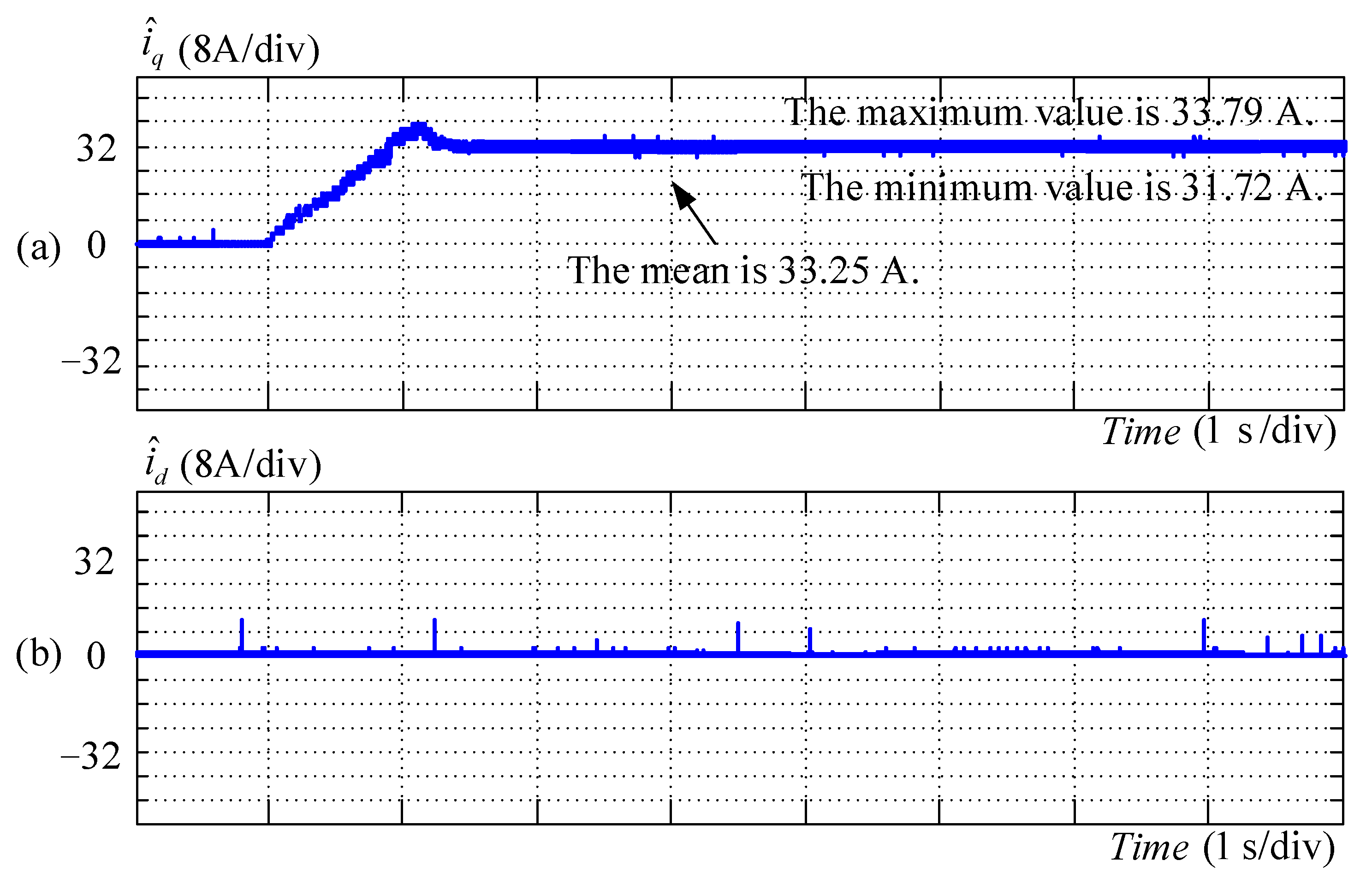
4.3. Measured Results of Induced EMF along Phase-a, Phase-b, and Phase-c with Compensation for Harmonic Components
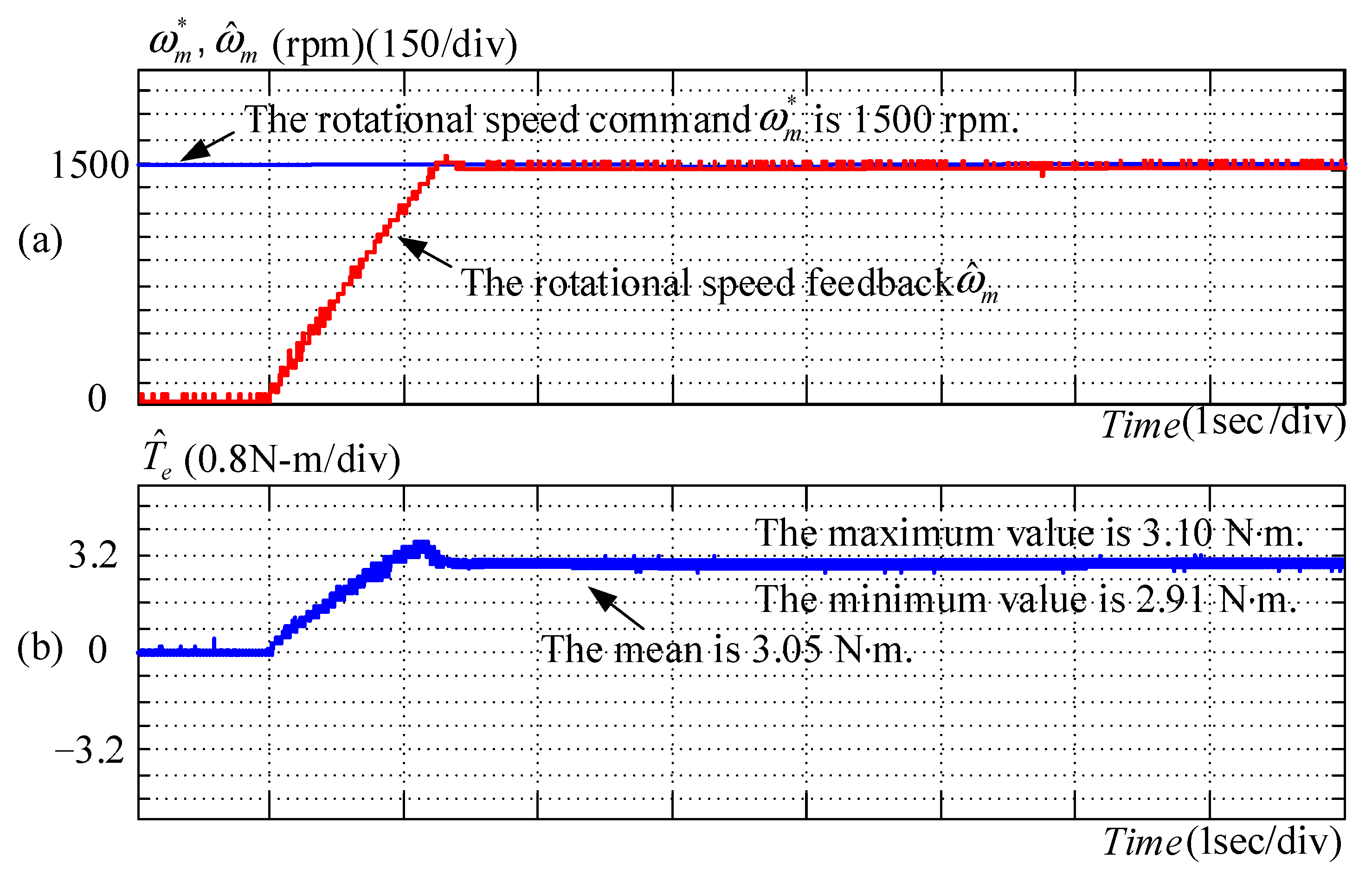
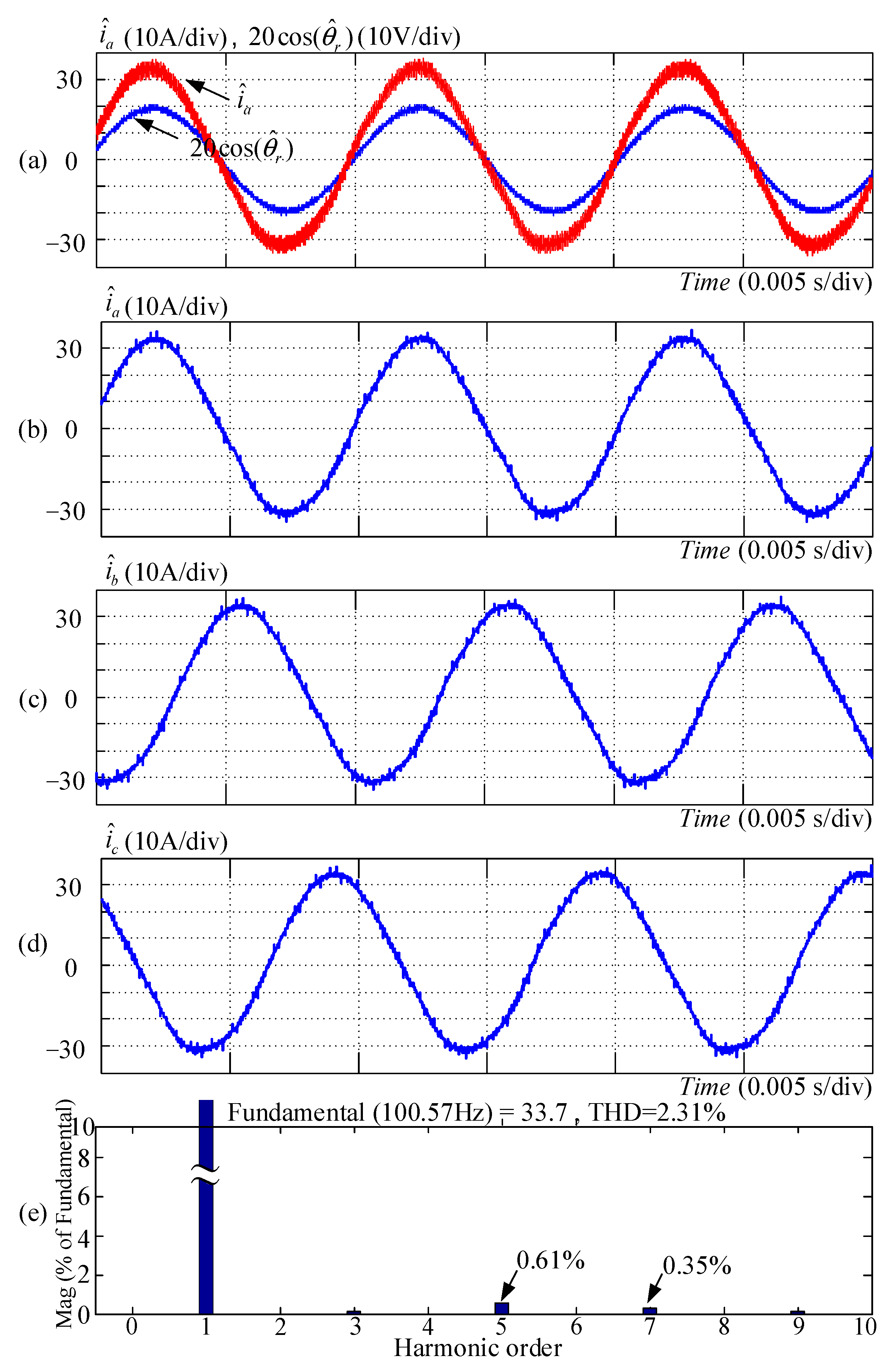
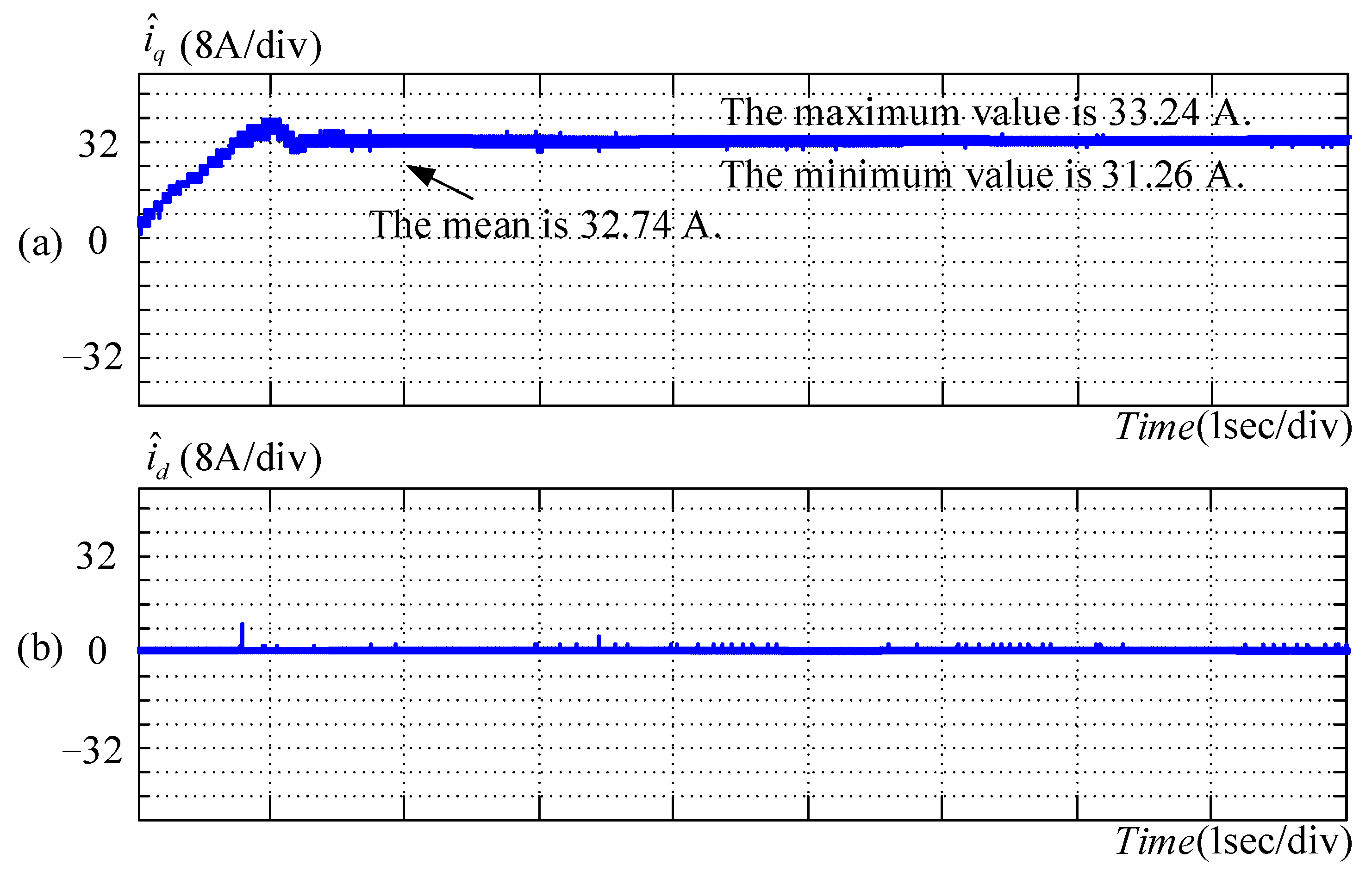
4.4. Measured Results of Induced EMF along q-Axis and d-Axis with Compensation Strategy for Harmonic Components
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Equivalent resistance of each phase | 45.87 mΩ |
| Equivalent inductance of each phase | 0.338 mH |
| Rotor flux linkage | |
| Fifth harmonic component of induced EMF | 3.30% |
| Seventh harmonic component of induced EMF | 1.55% |
| Rated torque | 3.0 N·m |
| Rated rotational speed | 1500 rpm |
| DC side voltage | 24 V |
| Equivalent viscosity coefficient | |
| Equivalent moment of inertia |
Appendix B
| Three-phase induced EMFs of the motor. | |
| The voltages observed on the q-axis and d-axis by project the three-phase induced EMFs to the rotor reference frame. | |
| The fifth and seventh harmonic components of the induced EMF. | |
| Three-phase currents of the stator. | |
| The currents observed on the q-axis and d-axis by project the three-phase currents to the rotor reference frame. | |
| Direct- and quadrature-axis inductance. | |
| Equivalent resistance of the stator. | |
| The transformation matrix to project the abc to the qd reference frame. | |
| The inverse transformation matrix to project the abc to the qd reference frame. | |
| Three-phase voltages of the stator. | |
| Phase shifts of each phase from the fifth and seventh harmonic components, respectively. | |
| Phase shifts of q-axis and d-axis from the sixth harmonic component, respectively. | |
| Electrical angle of the rotor. |
References
- Hoang, L.H.; Robert, P.; Rene, F. Minimization of Torque Ripple in Brushless DC Motor Drives. IEEE Trans. Ind. Appl. 1986, 4, 748–755. [Google Scholar]
- Liang, W.; Wang, J.; Luk, P.C.; Fang, W.; Fei, W. Analytical Modeling of Current Harmonic Components in PMSM Drive with Voltage-Source Inverter by SVPWM Technique. IEEE Trans. Energy Convers. 2014, 29, 673–680. [Google Scholar] [CrossRef] [Green Version]
- Mattavelli, P.; Tubiana, L.; Zigliotto, M. Torque-Ripple Reduction in PM Synchronous Motor Drives Using Repetitive Current Control. IEEE Trans. Power Electron. 2005, 20, 1423–1431. [Google Scholar] [CrossRef]
- Lee, G.H.; Kim, S.I.; Hong, J.P.; Bahn, J.H. Torque Ripple Reduction of Interior Permanent Magnet Synchronous Motor Using Harmonic Injected Current. IEEE Trans. Magn. 2005, 44, 1582–1585. [Google Scholar]
- Zhu, H.; Xiao, X.; Li, Y.D. Permanent Magnet Synchronous Motor Current Ripple Reduction with Harmonic Back-EMF Compensation. In Proceedings of the International Conference on Electrical Machines and Systems, Incheon, Korea, 10–13 October 2010; pp. 1094–1097. [Google Scholar]
- Hwang, J.C.; Wei, H.T. The current harmonics elimination control strategy for six-leg three-phase permanent magnet synchronous motor drives. IEEE Trans. Power Electron. 2014, 29, 3032–3040. [Google Scholar] [CrossRef]
- Lin, J.H. Current Harmonics Improvement of Three-phase Permanent-Magnet Synchronous Motor Drives. Master’s Thesis, Department of Electrical Engineering, National Taiwan University of Science and Technology, Taipei, Taiwan, 2015. [Google Scholar]
- Nakao, N.; Akatsu, K. A new control method for torque ripple compensation of permanent magnet motors. In Proceedings of the International Power Electronics Conference, Sapporo, Japan, 21–24 June 2010; pp. 1421–1427. [Google Scholar]
- Xiao, X.; Chen, C. Reduction of Torque Ripple Due to Demagnetization in PMSM Using Current Compensation. IEEE Trans. Appl. Supercon. 2010, 20, 1068–1071. [Google Scholar] [CrossRef]
- Flieller, D.; Nguyen, N.K.; Wira, P.; Sturtzer, G.; Abdeslam, D.O.; Mercklé, J. A Self-Learning Solution for Torque Ripple Reduction for Nonsinusoidal Permanent-Magnet Motor Drives Based on Artificial Neural Networks. IEEE Trans. Ind. Electron. 2014, 61, 655–666. [Google Scholar] [CrossRef] [Green Version]
- Siami, M.; Khaburi, D.A.; Rodríguez, J. Torque Ripple Reduction of Predictive Torque Control for PMSM Drives with Parameter Mismatch. IEEE Trans. Power Electron. 2017, 32, 7160–7168. [Google Scholar] [CrossRef]
- Liu, G.; Chen, B.; Wang, K.; Song, X. Selective Current Harmonic Suppression for High-Speed PMSM Based on High-Precision Harmonic Detection Method. IEEE Trans Ind. Inform. 2019, 15, 3457–3468. [Google Scholar] [CrossRef]
- Hwang, J.C.; Lim, C.Y.; Wei, H.T. The Current Harmonics Reduction of Six-phase Permanent-magnet Synchronous Motor Drives. IEEE Trans. Power Electron. 2013, 29, 3032–3040. [Google Scholar] [CrossRef]
- Zhang, P.; Sizov, G.Y.; Demerdash, N.A.O. Comparison of Torque Ripple Minimization Control Techniques in Surface-mounted Permanent Magnet Synchronous Machines. In Proceedings of the IEEE International Electronics Machines and Drives Conference, Niagara Falls, ON, Canada, 15–18 May 2011; pp. 188–193. [Google Scholar]
- Hanselman, D. Brushless Permanent Magnet Motor Design, 2nd ed.; Magna Physics Pub: Lebanon, OH, USA, 2006. [Google Scholar]




| Without Compensation for Harmonics in Induced EMF | With Compensation for Harmonics in Induced EMF along Phase-a, Phase-b, and Phase-c | With Compensation for Harmonics in Induced EMF along q-Axis and d-Axis | Explanation | |
|---|---|---|---|---|
| Peak-to-peak electromagnetic torque jitter | 0.46 N∙m | 0.19 N∙m | 0.18 N∙m | The current harmonic distortion rate with compensation strategy for the induced EMF along the q-axis and d-axis is smaller, and the torque ripple is lower. |
| Electromagnetic torque ripple | 15.28% | 6.23% | 5.98% | |
| Phase-a current total harmonic distortion rate | 5.30% | 2.57% | 2.31% | |
| Fifth harmonic component of current | 3.30% | 0.43% | 0.61% | |
| Seventh harmonic component of current | 2.97% | 0.72% | 0.35% | |
| Additional computational burden | - | , , | , | |
| Percentage of execution time in each switching cycle (100 μs = 100%) | 33% | 60% | 45% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kao, W.-T.; Hwang, J.-C.; Liu, J.-E. Development of Three-Phase Permanent-Magnet Synchronous Motor Drive with Strategy to Suppress Harmonic Current. Energies 2021, 14, 1583. https://doi.org/10.3390/en14061583
Kao W-T, Hwang J-C, Liu J-E. Development of Three-Phase Permanent-Magnet Synchronous Motor Drive with Strategy to Suppress Harmonic Current. Energies. 2021; 14(6):1583. https://doi.org/10.3390/en14061583
Chicago/Turabian StyleKao, Wei-Tse, Jonq-Chin Hwang, and Jia-En Liu. 2021. "Development of Three-Phase Permanent-Magnet Synchronous Motor Drive with Strategy to Suppress Harmonic Current" Energies 14, no. 6: 1583. https://doi.org/10.3390/en14061583