
Assessment of High-Electrification UK Scenarios with Varying Levels of Nuclear Power and Associated Post-Fault Behaviour





Abstract
1. Introduction
1.1. Related Work
1.2. Contribution
2. Scenarios and Assumptions
2.1. Demand and Generation Mix
2.1.1. Demand and VRES Profile
2.1.2. Generation Mix
2.2. Technologies
- Nuclear: Nuclear units were modelled as units with 1500 MW capacity, not subsidised and with identical fuel prices. Variable assumptions are made regarding capability of provision of primary response and minimum stable factors (MSF)—that is the minimum amount of power the system can generate—to assess the importance of these attributes as outlined in the case studies described in Section 3.
- Semi-base and peaking plants: These technologies represent other conventional synchronous generators including Biomass, CCGT, OCGT, Gas and diesel reciprocating engines. The units are split into 500 MW and 300 MW plants to represent a greater diversity, with the same constant of inertia for every unit.
- Wind (Onshore & Offshore): In-house profiles are used, and curtailment costs are applied as negative variable cost (£/MWh).
- Solar PV: In-house profiles are used, and curtailment costs are applied as negative variable cost (£/MWh).
- Run of river hydro: In-house profiles are used, and curtailment costs are applied as a negative variable cost (£/MWh).
- Battery Storage: This technology is represented as one large 2 h storage system of 17.3 GW. Parameters that are used to model the operation of battery and hydro storage (c-rate, roundtrip efficiency) are taken from Reference [35].
- Pumped Hydro Storage (PHS): This technology is represented as two reservoirs and one corresponding turbine/pump for each system. Pump and turbine modes are exclusive. Minimum discharge power for PHS in both pump/turbine modes is taken from Reference [36].
- Interconnectors: Future interconnectors are modelled as aggregated interconnectors. The flows were fixed (and taken from EU SysFlex outputs that models a pan-European system) and acts as boundary conditions to the cases investigated; thereby giving realistic consideration to the ability to call upon generation from outside of the UK.
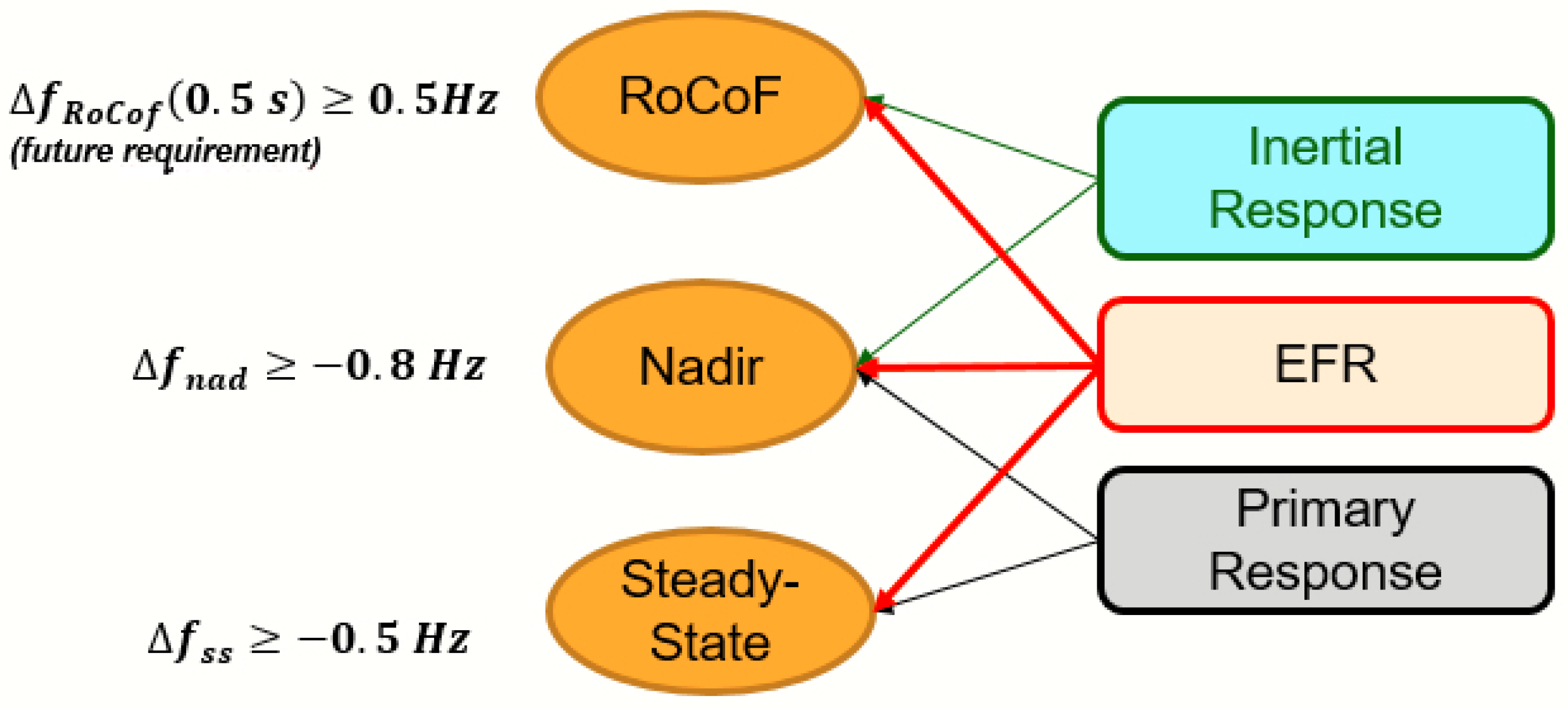
2.3. Frequency Constraint and System-Level Data
- The first requirement concerns the Rate of Change of Frequency (RoCoF). This quantity is defined as the frequency variation that occurs over a certain measuring window. Current settings envisage the RoCoF to be maintained above 1 Hz/s, evaluated over a 0.5 s measuring window. In other words, frequency must not drop by more than 0.5 Hz in 0.5 s. This paper adopted the above-mentioned value concerning the RoCoF threshold. However, it is worth noting that the 1 Hz/s setting has been revised pursuant to the Accelerated Loss of Mains Change Programme [43]. In fact, the maximum RoCoF was limit was 0.125 Hz/s. Furthermore, maintaining the post-fault RoCoF above security thresholds prevents the activation of RoCoF-driven relays of the so-called Loss of Main protection schemes. These are typically installed on board of distribution-connected generators.
- Following an infeed generation loss, system frequency would reach its maximum deviation at the so-called nadir condition. In particular, the maximum frequency deviation is set to −0.8 Hz. It is important to maintain post-fault frequency nadir above this value in order to prevent the activation of costly and disruptive Low Frequency Demand Disconnection schemes.
- Finally, after the deployment of primary frequency control, the system frequency reaches the so-called quasi-steady state condition (i.e., frequency is no longer decreasing/increasing but has not yet recovered to its nominal value). The system operator requires that frequency remains above −0.5 Hz during the quasi-steady state condition.
2.4. Optimisation Model
3. Case Studies
- Case study 0: ”Base case”In the base case, nuclear plants will be considered inflexible (i.e., they cannot generate below 98% of their maximum capacity). Onshore wind, offshore wind, and interconnectors instead may provide PR.
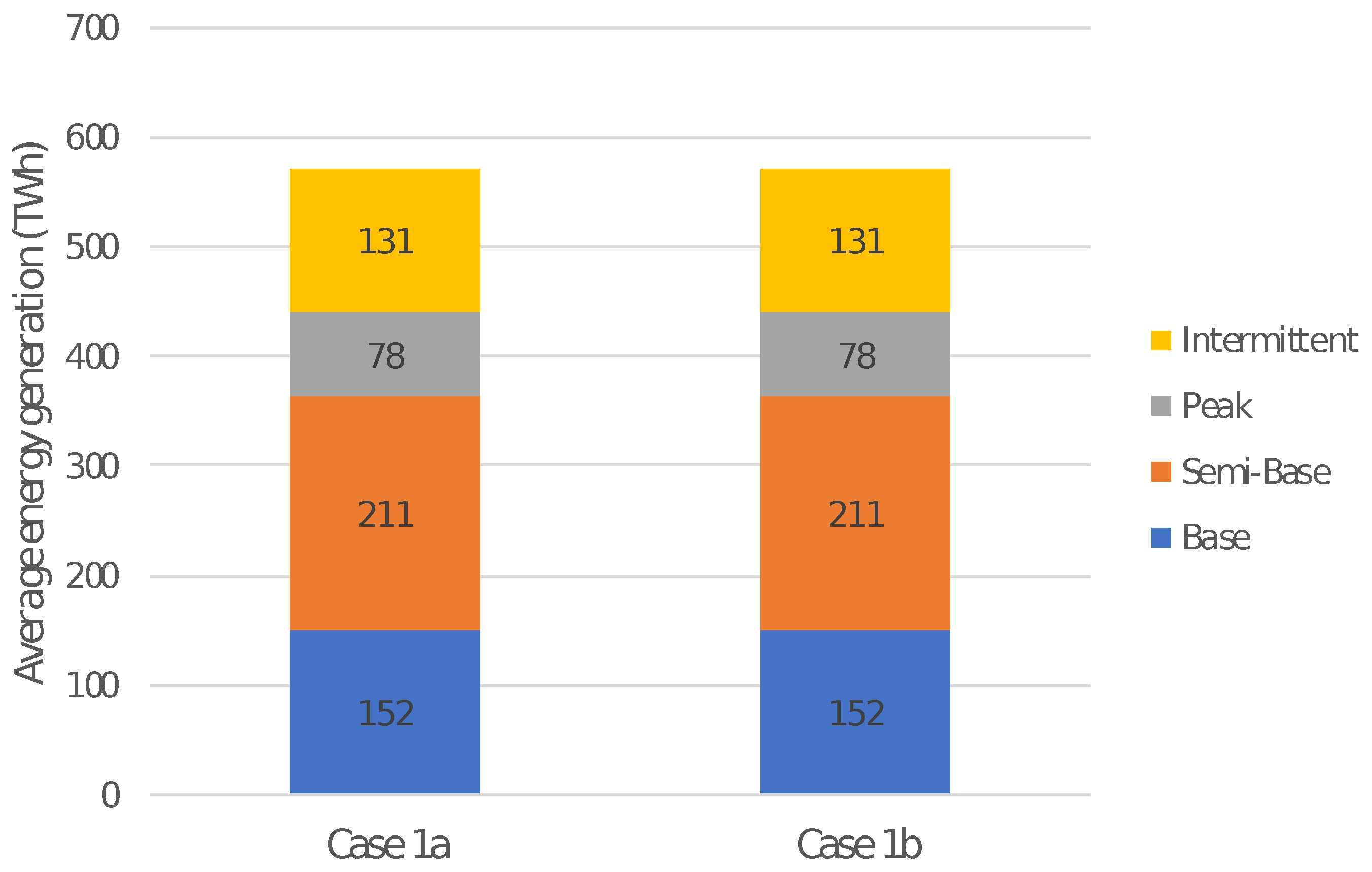
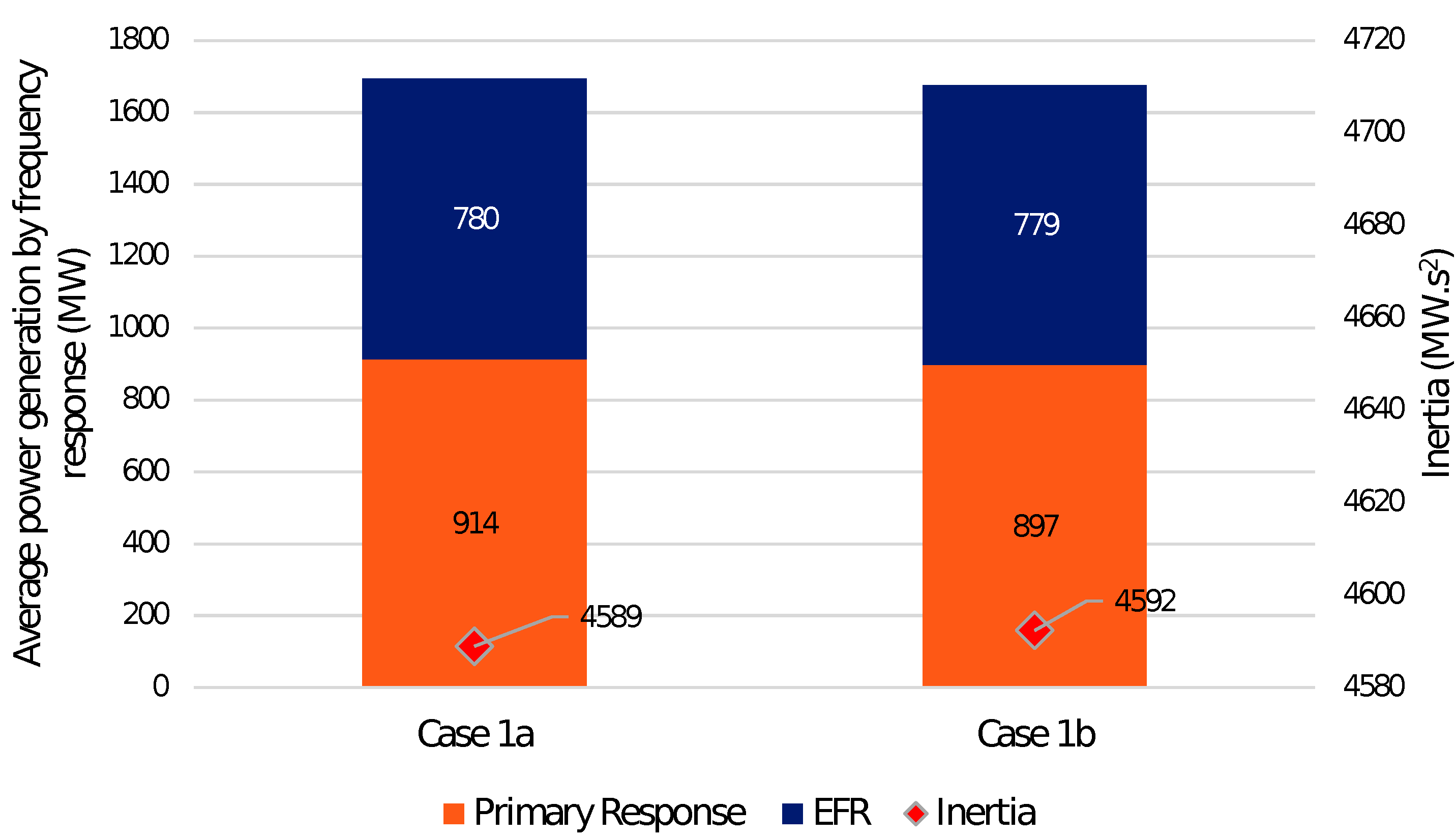
- Case study 1: “Flexible Nuclear I”Nuclear plants will be considered flexible (with an assumed 55% minimum stable factor in this case). Onshore wind, offshore wind and interconnectors are also able to provide primary response as in Case study 0. This lower minimum stable factor will impact nuclear operations and, by comparing it to the Case study 0, it will be possible to assess the benefits from nuclear flexibility.A sensitivity analysis is performed in Case study 1 by increasing nuclear power plant flexibility so they can vary their output to 55% of nominal power (Case 1a) and down to 20% (Case 1b) of nominal power.
- Case study 2: “Replacing semi-base gas with nuclear or with renewables while allowing flexible operation of nuclear plants in both instances”This case study will assess the benefits and challenges associated with varying amounts of renewables by replacing CCGT plants in the previous cases above. The purpose of replacing CCGT is to assess scenarios with lower gas demand, both as a mechanism to consider other possible future scenarios and reduce reliance on fossil fuels. Three simulations will be run:
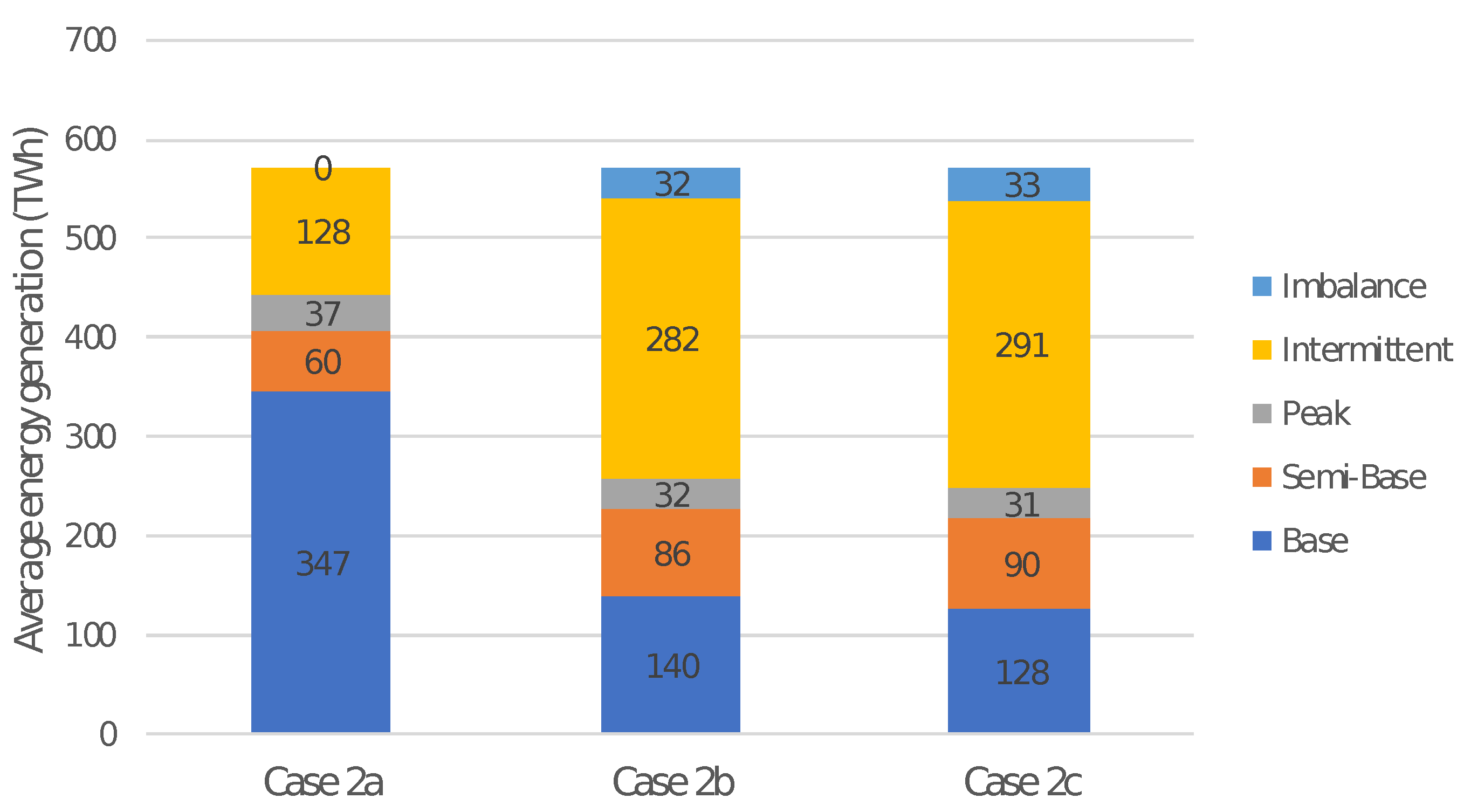
- Semi-base gas plants replaced only by nuclear plants with a minimum stable factor of 55% and with a nuclear share corresponding to 60% of average generation (Case 2a).
- Semi-base gas plants are completely replaced by intermittent renewables (specifically offshore wind) and nuclear, with nuclear units having a minimum stable factor of 55% (Case 2b). The nuclear share in this case is 20% of average generation.
- Semi-base gas plants are completely replaced by intermittent renewables (specifically offshore wind) and nuclear units having a minimum stable factor of 20%—with a nuclear share of 20% of average generation (Case 2c).
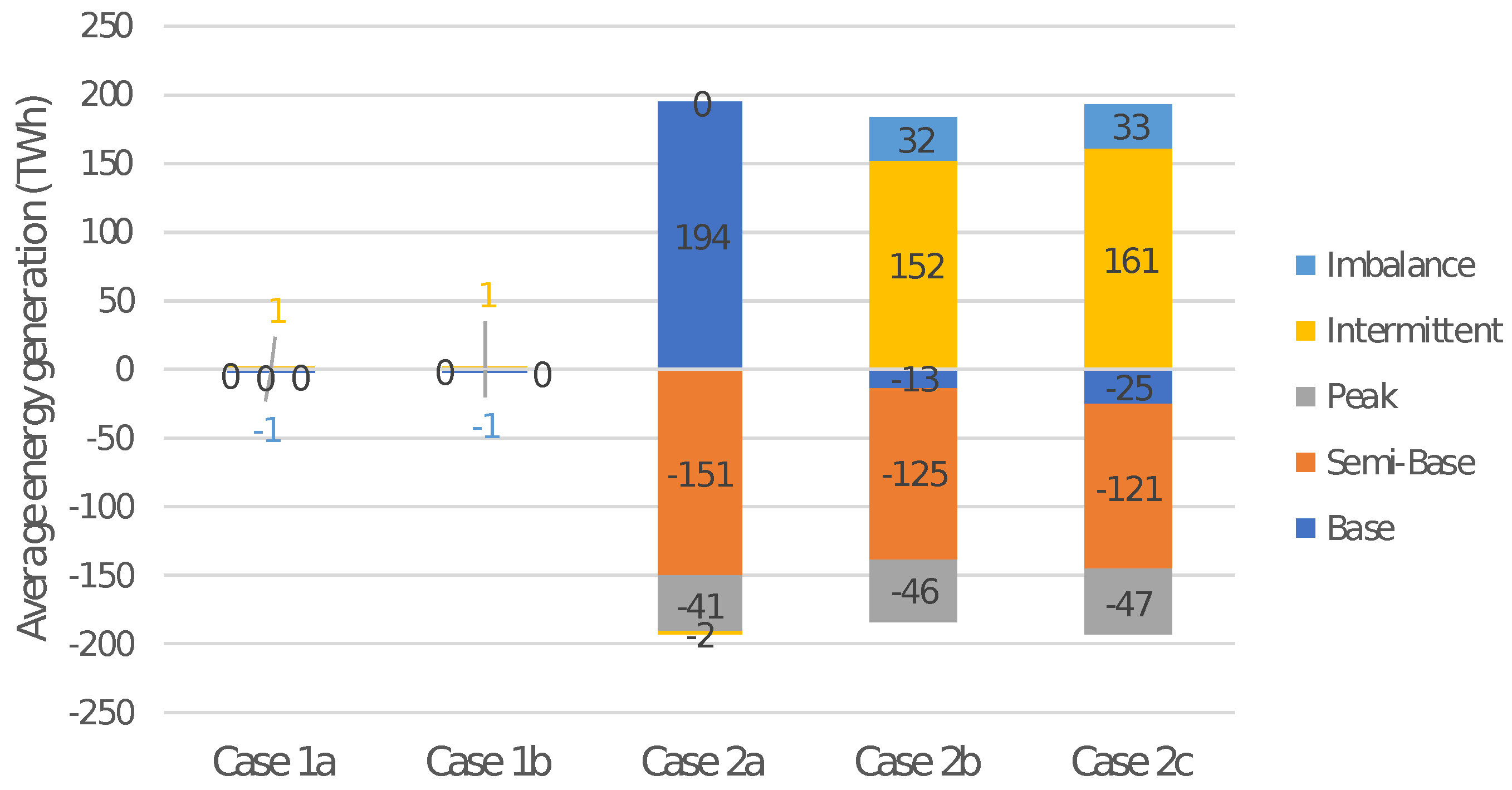
4. Results
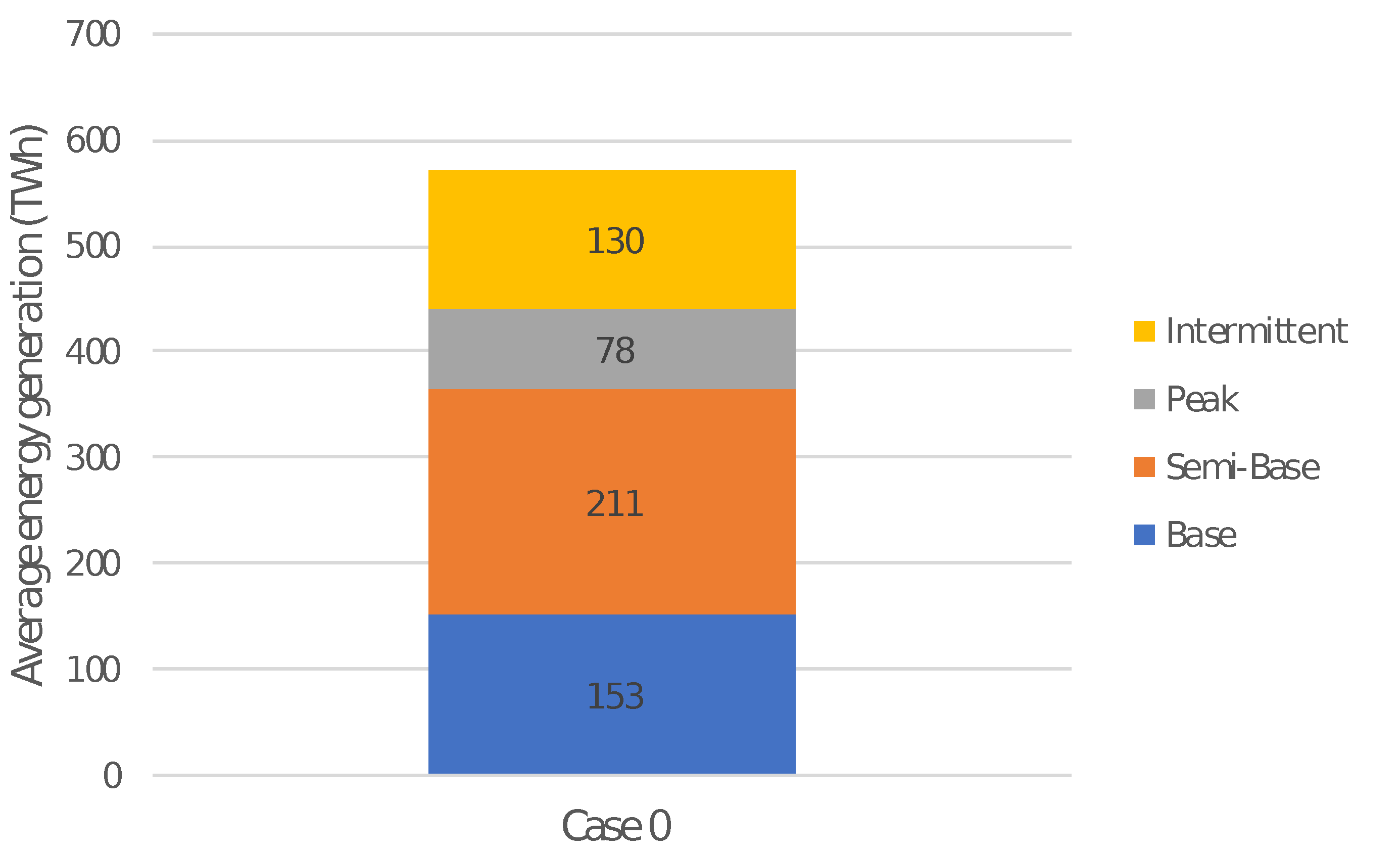
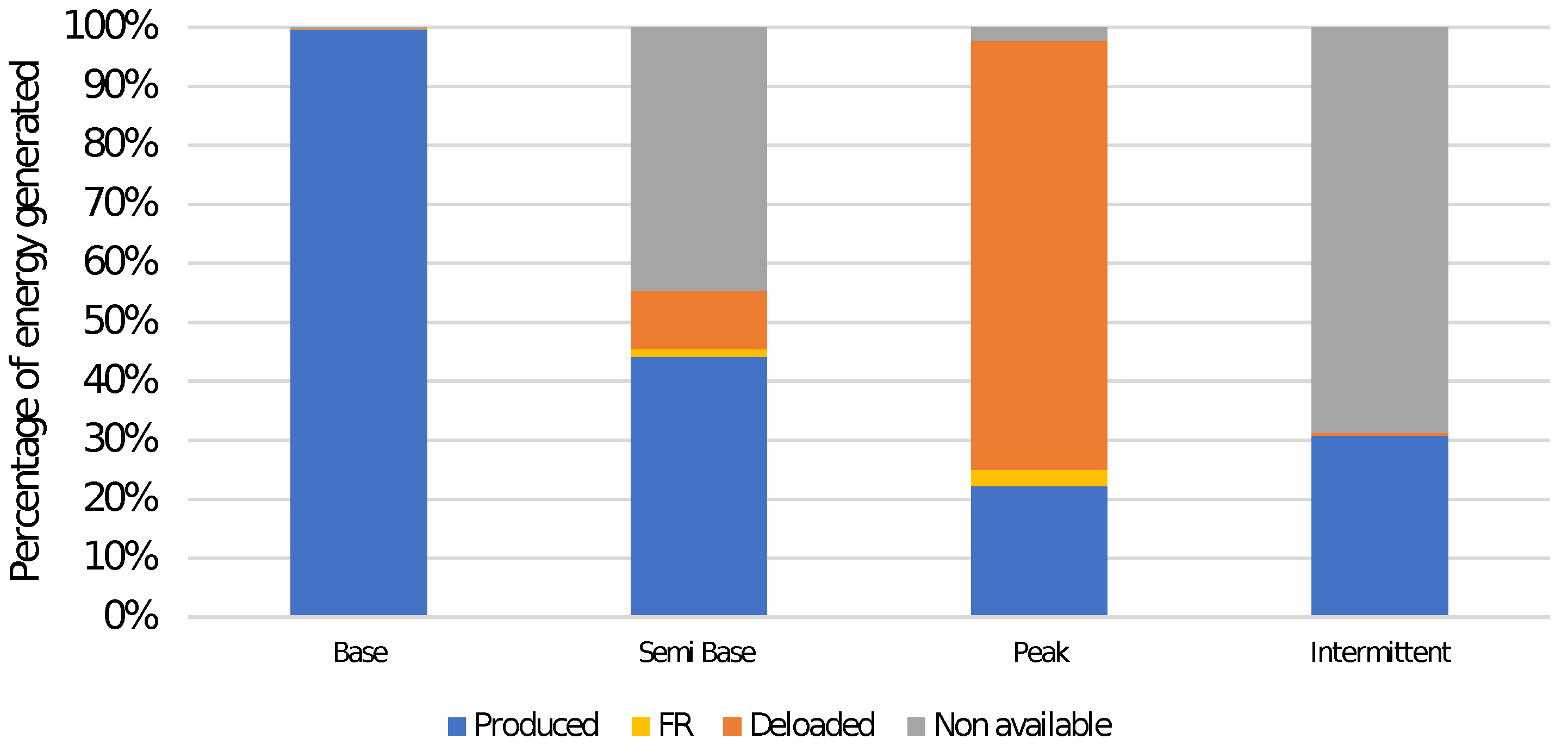
4.1. Case Study 0: Base Case
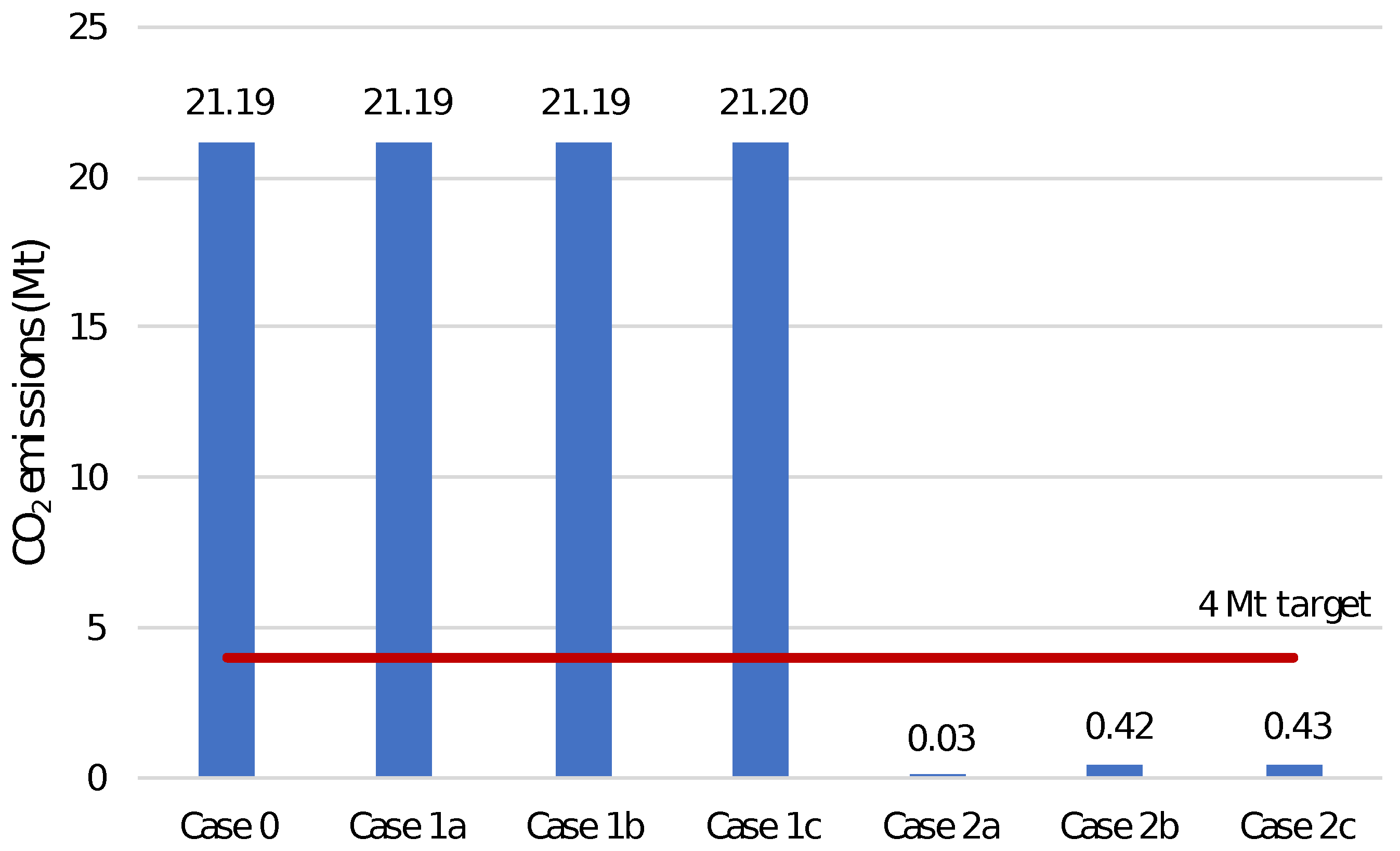
4.1.1. Energy and Carbon Dioxide Emissions
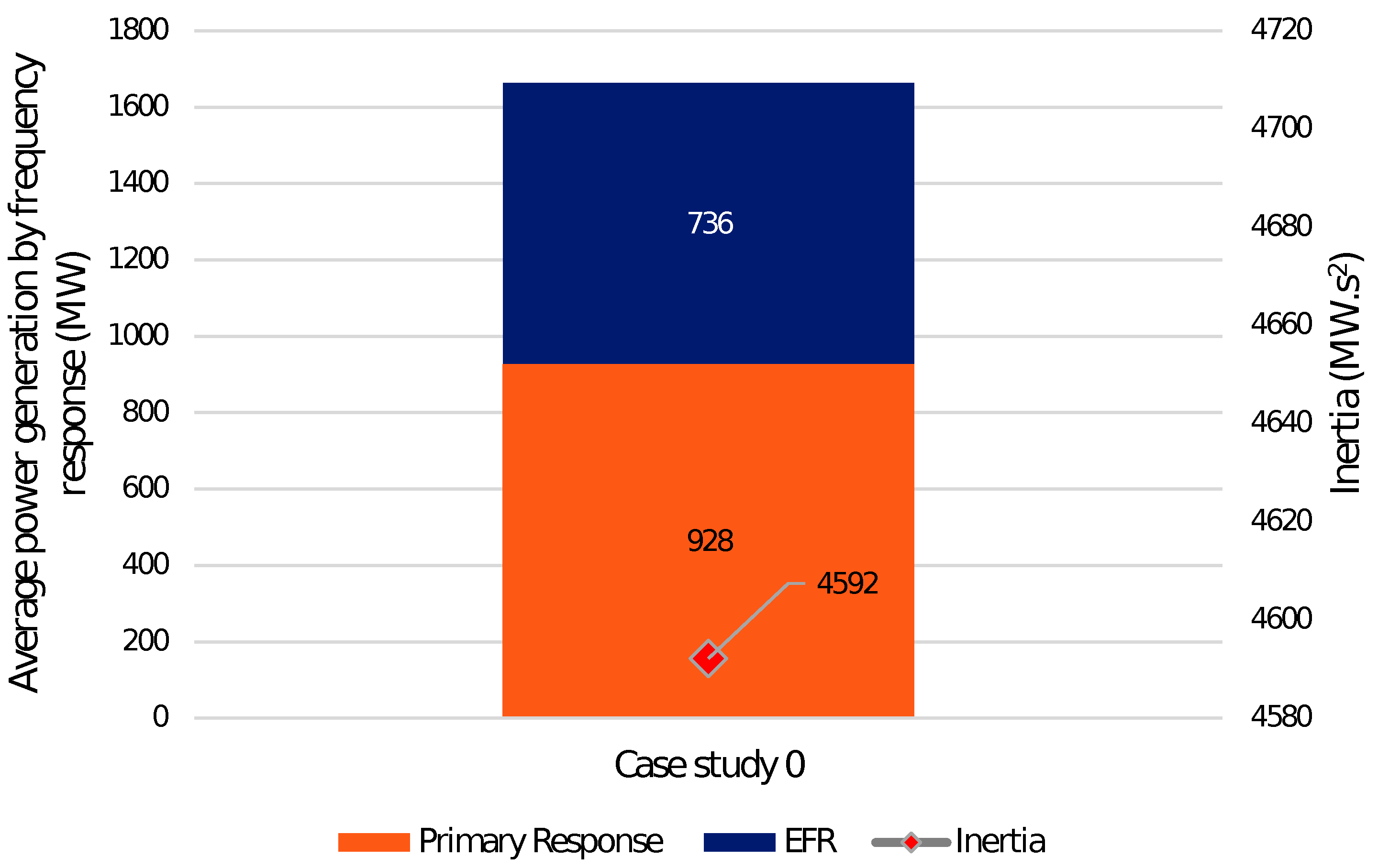
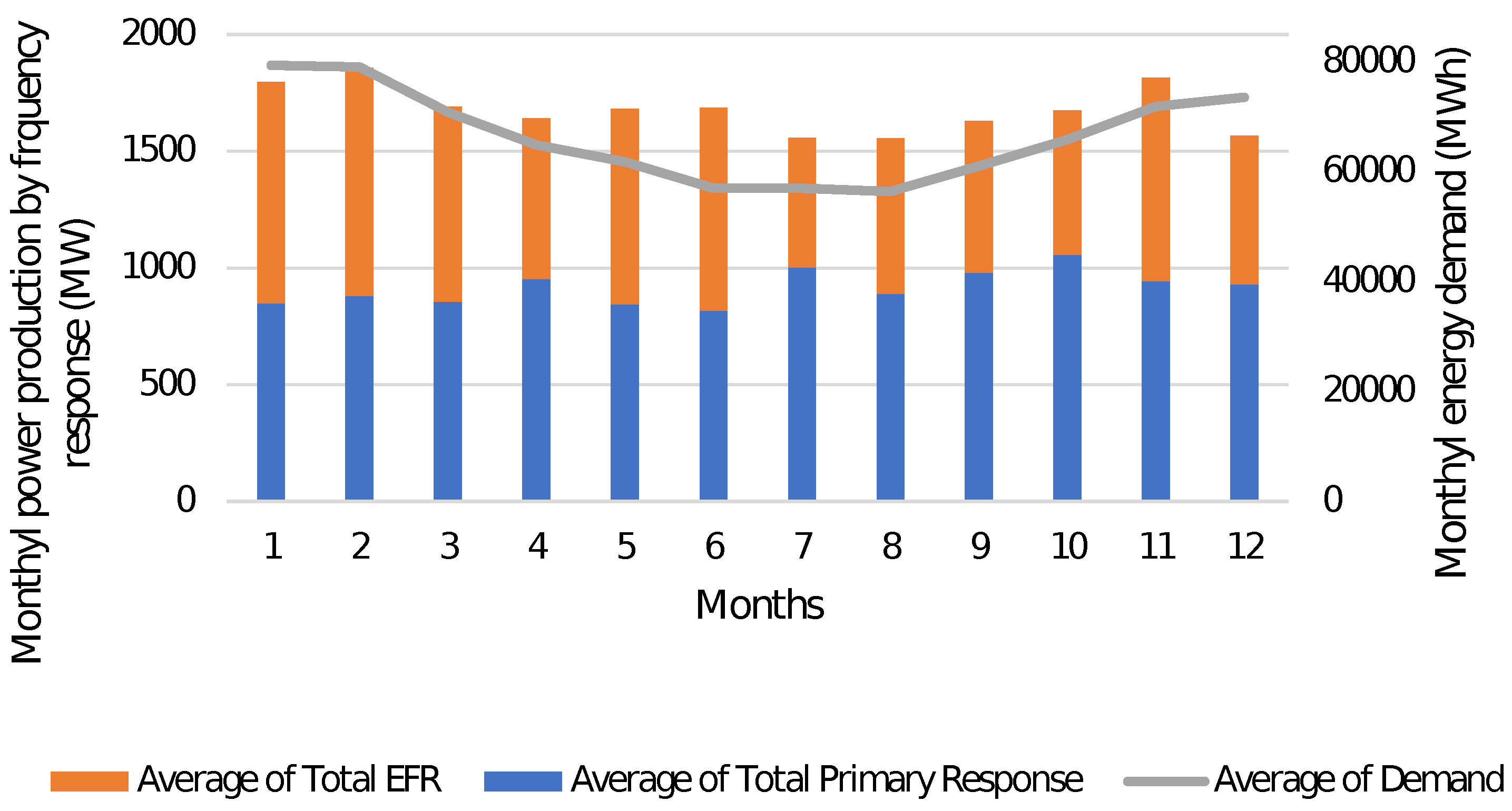
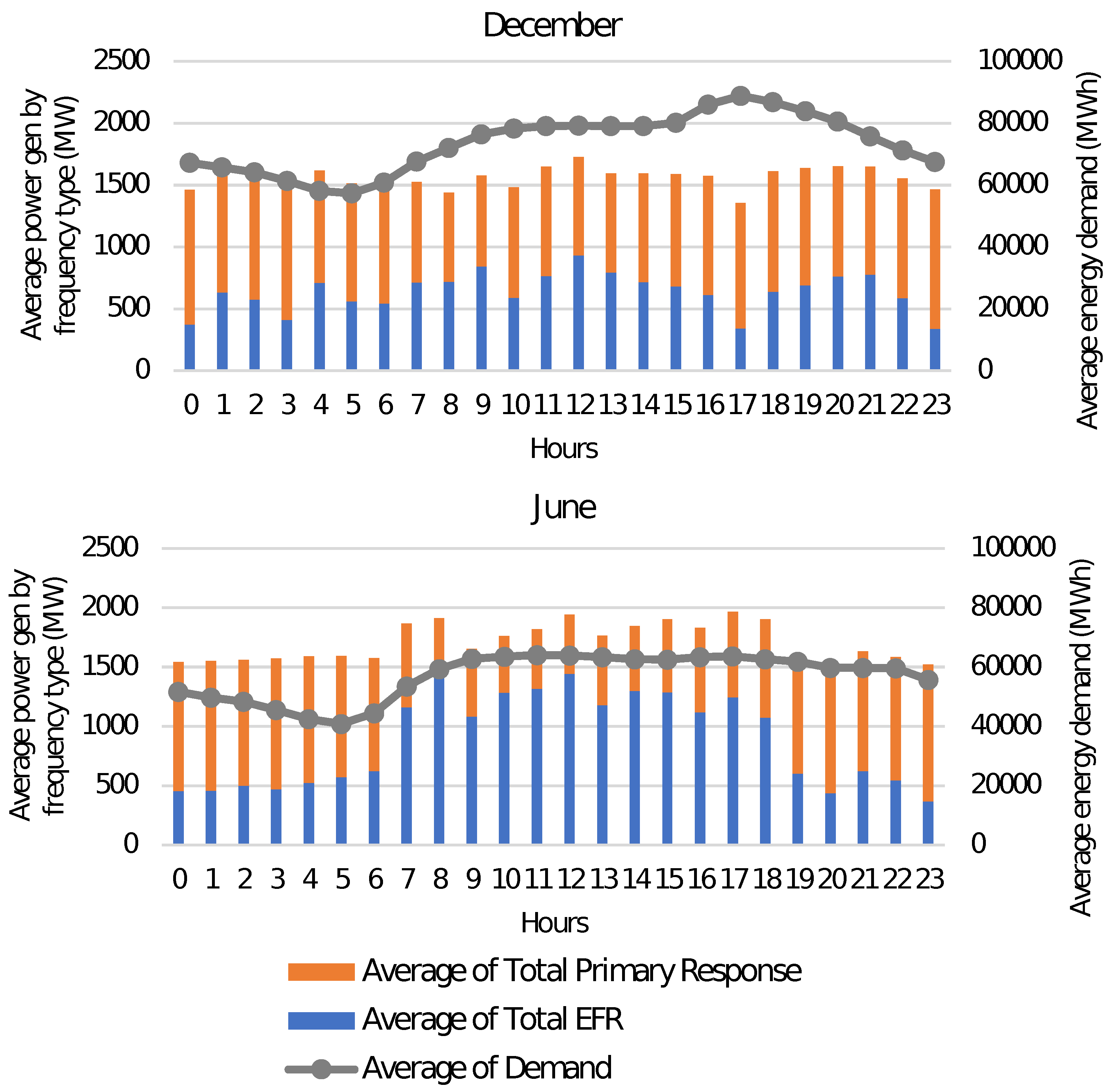
4.1.2. Frequency Response
4.2. Case Study 1: Nuclear Flexibility
4.2.1. Energy and Carbon Dioxide Emissions
4.2.2. Frequency Response
4.3. Case Study 2: Semi-Base GAS Replaced by Nuclear
4.3.1. Energy and Carbon Dioxide Emissions
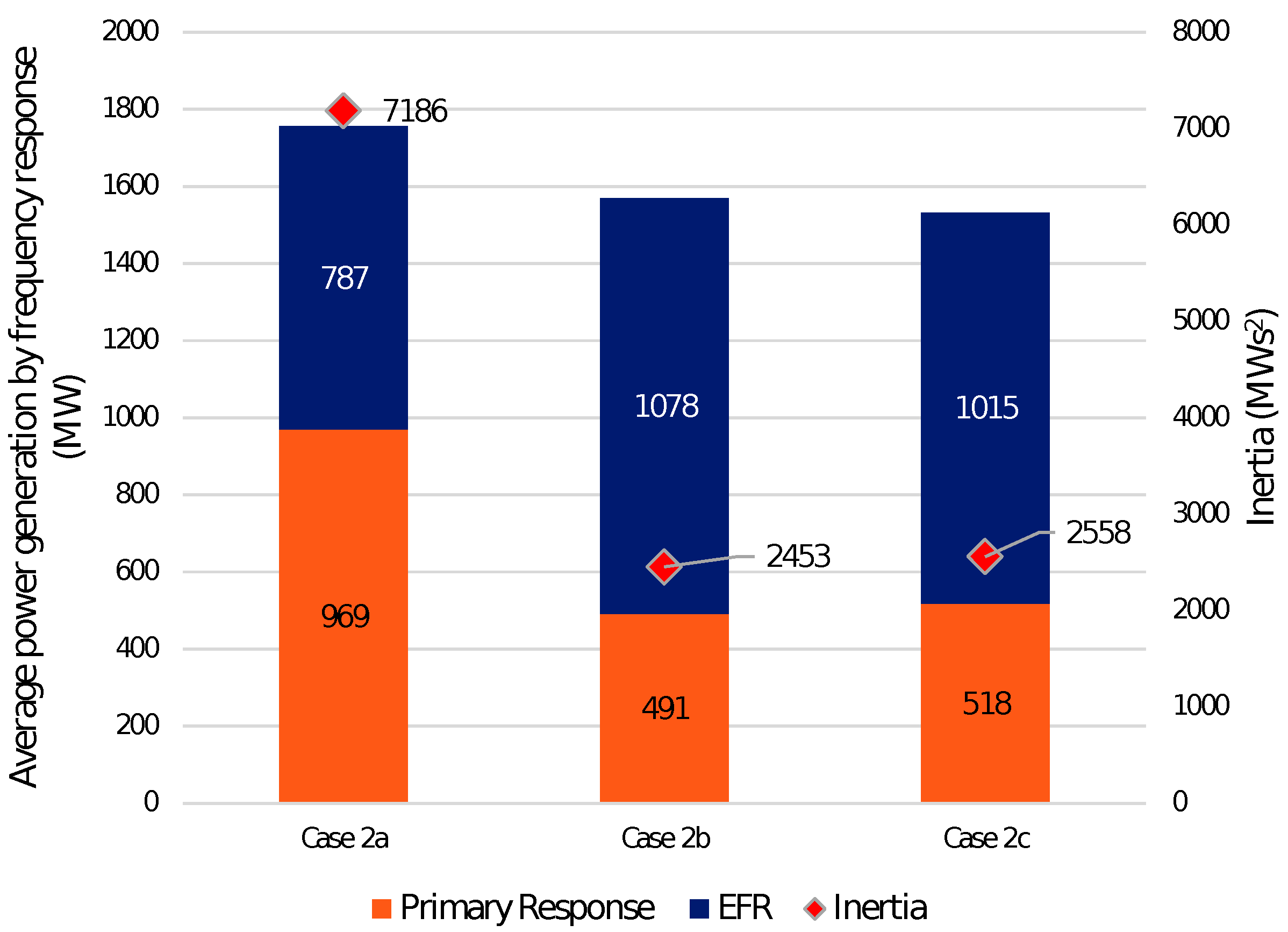
4.3.2. Frequency Response
4.4. Impact of Flexibility Cases on Nuclear Operation
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CCGT | Combined Cycle Gas Turbine |
| CCS | Carbon Capture and Storage |
| CO2 | Carbon dioxide |
| EFR | Enhanced Frequency Response |
| EV | Electric Vehicle |
| FR | Frequency Response |
| GB | Great Britain |
| IR | Inertial Response |
| LP | Linear Programming |
| MILP | Mixed Integer Linear Programming |
| MSF | Minimum Stable Factor |
| OCGT | Open Cycle Gas Turbine |
| PHS | Pumped Hydro Storage |
| PR | Primary Response |
| PV | Photo Voltaic |
| RoCoF | Rate of Change of Frequency |
| UC | Unit Commitment |
| V2G | Vehicle to Grid |
| VRES | Variable Renewable Energy Sources |
References
- Johnson, S.C.; Rhodes, J.D.; Webber, M.E. Understanding the impact of non-synchronous wind and solar generation on grid stability and identifying mitigation pathways. Appl. Energy 2020, 262, 114492. [Google Scholar] [CrossRef]
- Chau, T.K.; Yu, S.S.; Fernando, T.L.; Iu, H.H.C.; Small, M. A novel control strategy of DFIG wind turbines in complex power systems for enhancement of primary frequency response and LFOD. IEEE Trans. Power Syst. 2017, 33, 1811–1823. [Google Scholar] [CrossRef]
- Greenwood, D.; Lim, K.Y.; Patsios, C.; Lyons, P.; Lim, Y.S.; Taylor, P. Frequency response services designed for energy storage. Appl. Energy 2017, 203, 115–127. [Google Scholar] [CrossRef]
- Boston, A.; Thomas, H.; Managing flexibility whilst decarbonising the GB electricity system. Energy Res. Partnersh. 2015. Available online: https://erpuk.org/wp-content/uploads/2015/12/1.-ERP-Boston.pdf (accessed on 1 December 2020).
- Peakman, A.; Merk, B.; Hesketh, K. The Potential of Pressurised Water Reactors to Provide Flexible Response in Future Electricity Grids. Energies 2020, 13, 941. [Google Scholar] [CrossRef]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994; Volume 7. [Google Scholar]
- Trovato, V.; Bialecki, A.; Dallagi, A. Unit commitment with inertia-dependent and multispeed allocation of frequency response services. IEEE Trans. Power Syst. 2018, 34, 1537–1548. [Google Scholar] [CrossRef]
- Tan, Y.; Muttaqi, K.M.; Ciufo, P.; Meegahapola, L. Enhanced frequency response strategy for a PMSG-based wind energy conversion system using ultracapacitor in remote area power supply systems. IEEE Trans. Ind. Appl. 2017, 53, 549–558. [Google Scholar] [CrossRef]
- Díaz-González, F.; Hau, M.; Sumper, A.; Gomis-Bellmunt, O. Participation of wind power plants in system frequency control: Review of grid code requirements and control methods. Renew. Sustain. Energy Rev. 2014, 34, 551–564. [Google Scholar] [CrossRef]
- Li, P.; Hu, W.; Hu, R.; Huang, Q.; Yao, J.; Chen, Z. Strategy for wind power plant contribution to frequency control under variable wind speed. Renew. Energy 2019, 130, 1226–1236. [Google Scholar] [CrossRef]
- De Rijcke, S.; Tielens, P.; Rawn, B.; Van Hertem, D.; Driesen, J. Trading energy yield for frequency regulation: Optimal control of kinetic energy in wind farms. IEEE Trans. Power Syst. 2014, 30, 2469–2478. [Google Scholar] [CrossRef]
- NG. Frequency Response Technical Sub-Group Report; Technical Report; 2011. Available online: https://www.nationalgrideso.com/document/25546/download (accessed on 4 January 2021).
- Kheshti, M.; Ding, L.; Bao, W.; Yin, M.; Wu, Q.; Terzija, V. Toward intelligent inertial frequency participation of wind farms for the grid frequency control. IEEE Trans. Ind. Inform. 2019, 16, 6772–6786. [Google Scholar] [CrossRef]
- Tsormpatzoudis, V.; Forsyth, A.J.; Todd, R. Rapid Evaluation of Battery System Rating For Frequency Response Operation. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Trovato, V.; Sanz, I.M.; Chaudhuri, B.; Strbac, G. Advanced control of thermostatic loads for rapid frequency response in Great Britain. IEEE Trans. Power Syst. 2016, 32, 2106–2117. [Google Scholar] [CrossRef]
- HM Government. 2050 Pathways Analysis; Technical Report; Department of Energy and Climate Change: 2010. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/42562/216-2050-pathways-analysis-report.pdf (accessed on 1 December 2020).
- Pina, A.; Silva, C.A.; Ferrão, P. High-resolution modeling framework for planning electricity systems with high penetration of renewables. Appl. Energy 2013, 112, 215–223. [Google Scholar] [CrossRef]
- Price, J.; Zeyringer, M.; Konadu, D.; Mourão, Z.S.; Moore, A.; Sharp, E. Low carbon electricity systems for Great Britain in 2050: An energy-land-water perspective. Appl. Energy 2018, 228, 928–941. [Google Scholar] [CrossRef]
- Zeyringer, M.; Price, J.; Fais, B.; Li, P.H.; Sharp, E. Designing low-carbon power systems for Great Britain in 2050 that are robust to the spatiotemporal and inter-annual variability of weather. Nat. Energy 2018, 3, 395–403. [Google Scholar] [CrossRef]
- Pfenninger, S.; Keirstead, J. Renewables, nuclear, or fossil fuels? Scenarios for Great Britain’s power system considering costs, emissions and energy security. Appl. Energy 2015, 152, 83–93. [Google Scholar] [CrossRef]
- Ekins, P.; Keppo, I.; Skea, J.; Strachan, N.; Usher, W.; Anandarajah, G. The UK Energy System in 2050: Comparing Low-Carbon, Resilient Scenarios. 2013. Available online: http://www.ukerc.ac.uk/support/tiki-download_file.php?fileId=2976 (accessed on 1 December 2020).
- NG. Future Energy Scenarios 2018. National Grid 2018. Available online: https://www.nationalgrideso.com/sites/eso/files/documents/fes-2018-faqs-for-website-v30.pdf (accessed on 4 January 2021).
- Chávez, H.; Baldick, R.; Sharma, S. Governor rate-constrained OPF for primary frequency control adequacy. IEEE Trans. Power Syst. 2014, 3, 1473–1480. [Google Scholar] [CrossRef]
- Ahmadi, H.; Ghasemi, H. Security-constrained unit commitment with linearized system frequency limit constraints. IEEE Trans. Power Syst. 2014, 29, 1536–1545. [Google Scholar] [CrossRef]
- Teng, F.; Trovato, V.; Strbac, G. Stochastic scheduling with inertia-dependent fast frequency response requirements. IEEE Trans. Power Syst. 2015, 31, 1557–1566. [Google Scholar] [CrossRef]
- Cardozo, C.; Van Ackooij, W.; Capely, L. Cutting plane approaches for frequency constrained economic dispatch problems. Electr. Power Syst. Res. 2018, 156, 54–63. [Google Scholar] [CrossRef]
- Trovato, V.; Teng, F.; Strbac, G. Role and benefits of flexible thermostatically controlled loads in future low-carbon systems. IEEE Trans. Smart Grid 2017, 9, 5067–5079. [Google Scholar] [CrossRef]
- Badesa, L.; Teng, F.; Strbac, G. Simultaneous scheduling of multiple frequency services in stochastic unit commitment. IEEE Trans. Power Syst. 2019, 34, 3858–3868. [Google Scholar] [CrossRef]
- Chu, Z.; Markovic, U.; Hug, G.; Teng, F. Towards optimal system scheduling with synthetic inertia provision from wind turbines. IEEE Trans. Power Syst. 2020, 35, 4056–4066. [Google Scholar] [CrossRef]
- Paturet, M.; Markovic, U.; Delikaraoglou, S.; Vrettos, E.; Aristidou, P.; Hug, G. Stochastic unit commitment in low-inertia grids. IEEE Trans. Power Syst. 2020, 35, 3448–3458. [Google Scholar] [CrossRef]
- Rahmani, M.; Hosseinian, S.H.; Abedi, M. Stochastic two-stage reliability-based Security Constrained Unit Commitment in smart grid environment. Sustain. Energy Grids Netw. 2020, 22, 100348. [Google Scholar] [CrossRef]
- EU-SysFlex. EU-SysFlex Scenarions and Network Sensitivities; Technical Report; EU-SysFlex: 2018. Available online: http://eu-sysflex.com/wp-content/uploads/2018/12/D2.2_EU-SysFlex_Scenarios_and_Network_Sensitivities_v1.pdf (accessed on 1 December 2020).
- BEIS. The Clean Growth Strategy: Leading the Way to a Low Carbon Future. 2018. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/700496/clean-growth-strategy-correction-april-2018.pdf (accessed on 1 December 2020).
- ESC. Preparing UK Electricity Networks for Electric Vehicles Report. 2018. Available online: https://es.catapult.org.uk/reports/preparing-uk-electricity-networks-for-electric-vehicles/ (accessed on 1 December 2020).
- Faunce, T.A.; Prest, J.; Su, D.; Hearne, S.J.; Iacopi, F. On-grid batteries for large-scale energy storage: Challenges and opportunities for policy and technology. MRS Energy Sustain. 2018, 5, E11. [Google Scholar] [CrossRef]
- Li, N.; Hedman, K.W. Evaluation of the adjustable-speed pumped hydro storage in systems with renewable resources. In Proceedings of the 2016 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Dallas, TX, USA, 3–5 May 2016; pp. 1–5. [Google Scholar]
- Wilson, P.D. The Nuclear Fuel Cycle: From Ore to Wastes; Oxford University Press: Oxford, UK, 1996. [Google Scholar]
- Lee, W.E.; Ojovan, M.I.; Jantzen, C.M. Radioactive Waste Management and Contaminated Site Clean-up: Processes, Technologies and International Experience; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Peakman, A.; Gregg, R. The Fuel Cycle Implications of Nuclear Process Heat. Energies 2020, 13, 6073. [Google Scholar] [CrossRef]
- NG. Grid Code—Connection Condition. 2018. Available online: https://www.nationalgrid.com/sites/default/files/documents/8589935284-Connection%20Conditions.pdf (accessed on 4 January 2021).
- Spallarossa, C.; Merlin, M.; Green, T. Augmented inertial response of multi-level converters using internal energy storage. In Proceedings of the 2016 IEEE International Energy Conference (ENERGYCON), Leuven, Belgium, 4–8 April 2016; pp. 1–6. [Google Scholar]
- Gundogdu, B.; Nejad, S.; Gladwin, D.T.; Stone, D.A. A battery energy management strategy for UK enhanced frequency response. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 26–31. [Google Scholar]
- Spillett, D. Frequency changes during large disturbances and their impact on the total system. Natl. Grid Warwick U. K. Tech. Rep. 2013. Available online: https://www.nationalgrideso.com/document/10821/download (accessed on 4 January 2021).
- Zhang, L.; Capuder, T.; Mancarella, P. Unified unit commitment formulation and fast multi-service LP model for flexibility evaluation in sustainable power systems. IEEE Trans. Sustain. Energy 2015, 7, 658–671. [Google Scholar] [CrossRef]
- Chen, H.; Liu, M.; Cheng, Y.; Lin, S. Modeling of Unit Commitment with AC Power Flow Constraints Through Semi-Continuous Variables. IEEE Access 2019, 7, 52015–52023. [Google Scholar] [CrossRef]
- Trovato, V.; Mazza, A.; Chicco, G. Flexible operation of low-inertia power systems connected via high voltage direct current interconnectors. Electr. Power Syst. Res. 2020, 192, 106911. [Google Scholar] [CrossRef]
- BEIS. Report Greenhouse Gas Emissions, Provisional Figures Statistical Release: National Statistics; 2017. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/695930/2017_Provisional_Emissions_statistics_2.pdf (accessed on 4 January 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EU SysFlex 1 | Range of UK Pathways | Range of FES Assumptions | |
|---|---|---|---|
| Annual demand (TWh) | 585 | 339–647 | 373–441 |
| Parameter | Value | Unit |
|---|---|---|
| Largest infeed loss | 1800 | MW |
| Maximum absolute frequency deviation at steady-state | 0.5 | Hz |
| Maximum absolute frequency deviation for RoCoF condition | 0.5 | Hz |
| Maximum absolute frequency deviation at nadir 1 condition | 0.8 | Hz |
| Nominal system frequency | 50 | Hz |
| Load damping | 0.01 | Hz |
| Evaluation time for RoCoF constraint | 0.5 | s |
| Delivery time for PR | 10 | s |
| Delivery time for EFR | 1 | s |
| Case Study | Total Number of Shutdowns | Minimum Number of Units Online | Number of Hours at Least One Unit Is Offline |
|---|---|---|---|
| Case study 0 | 0 | 12/12 | 0 |
| Case study 1a (Nuclear MSF 55%) | 9 | 11/12 | 120 |
| Case study 1b (Nuclear MSF 20%) | 2 | 11/12 | 25 |
| Case study 2a (Gas replaced by nuclear) | 29 | 35/36 | 5567 |
| Case study 2b (Nuclear MSF 55% & gas replaced by off-shore wind) | 66 | 11/12 | 2706 |
| Case study 2c (Nuclear MSF 20% & gas replaced by off-shore wind) | 54 | 11/12 | 2313 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hadri, M.; Trovato, V.; Bialecki, A.; Merk, B.; Peakman, A. Assessment of High-Electrification UK Scenarios with Varying Levels of Nuclear Power and Associated Post-Fault Behaviour. Energies 2021, 14, 1780. https://doi.org/10.3390/en14061780
Hadri M, Trovato V, Bialecki A, Merk B, Peakman A. Assessment of High-Electrification UK Scenarios with Varying Levels of Nuclear Power and Associated Post-Fault Behaviour. Energies. 2021; 14(6):1780. https://doi.org/10.3390/en14061780
Chicago/Turabian StyleHadri, Mohamed, Vincenzo Trovato, Agnes Bialecki, Bruno Merk, and Aiden Peakman. 2021. "Assessment of High-Electrification UK Scenarios with Varying Levels of Nuclear Power and Associated Post-Fault Behaviour" Energies 14, no. 6: 1780. https://doi.org/10.3390/en14061780
APA StyleHadri, M., Trovato, V., Bialecki, A., Merk, B., & Peakman, A. (2021). Assessment of High-Electrification UK Scenarios with Varying Levels of Nuclear Power and Associated Post-Fault Behaviour. Energies, 14(6), 1780. https://doi.org/10.3390/en14061780