
Model-Free Neural Network-Based Predictive Control for Robust Operation of Power Converters




Abstract
:1. Introduction
1.1. Motivation and Aim
1.2. Literature Review
1.3. Contribution
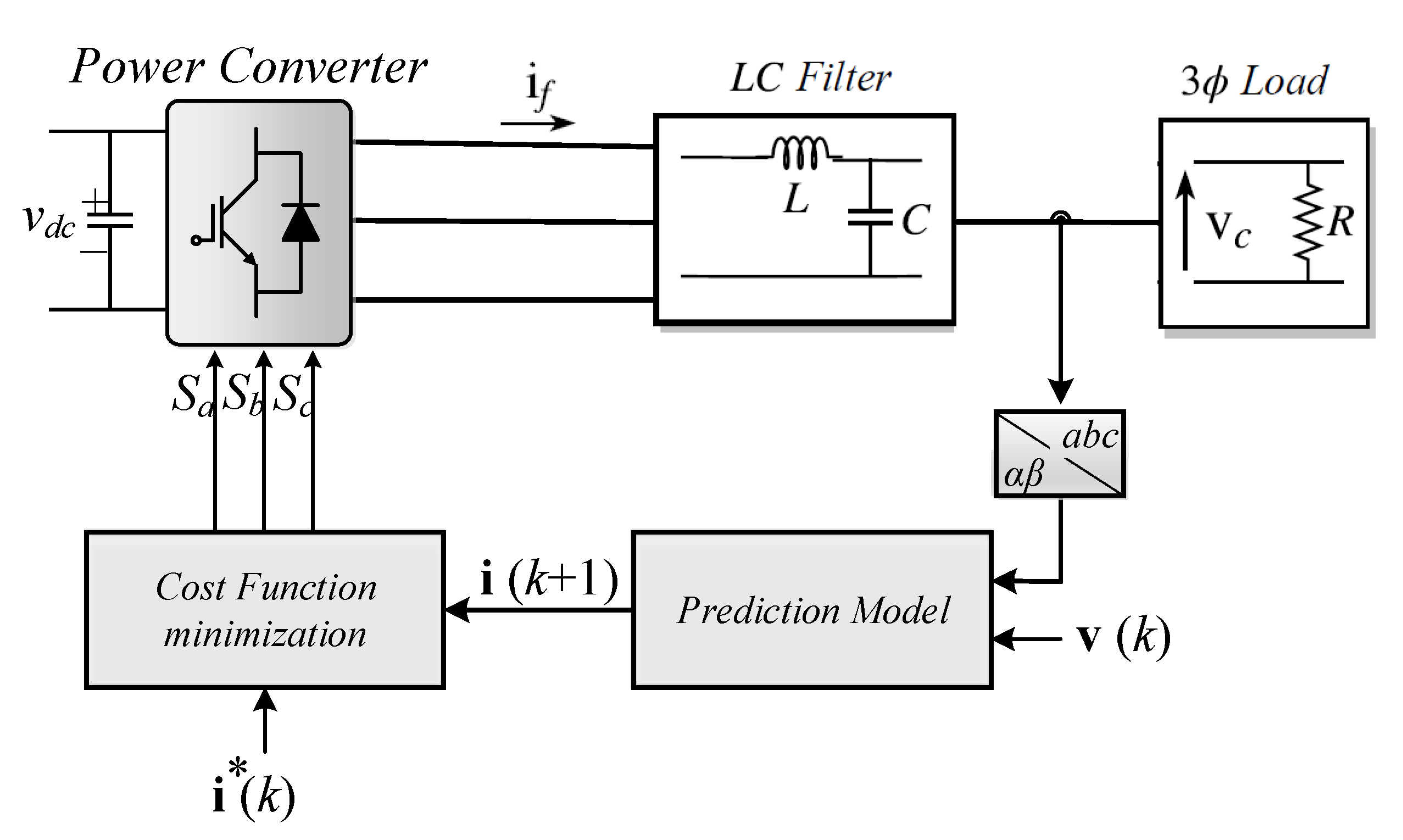
2. Conventional Model Predictive Control
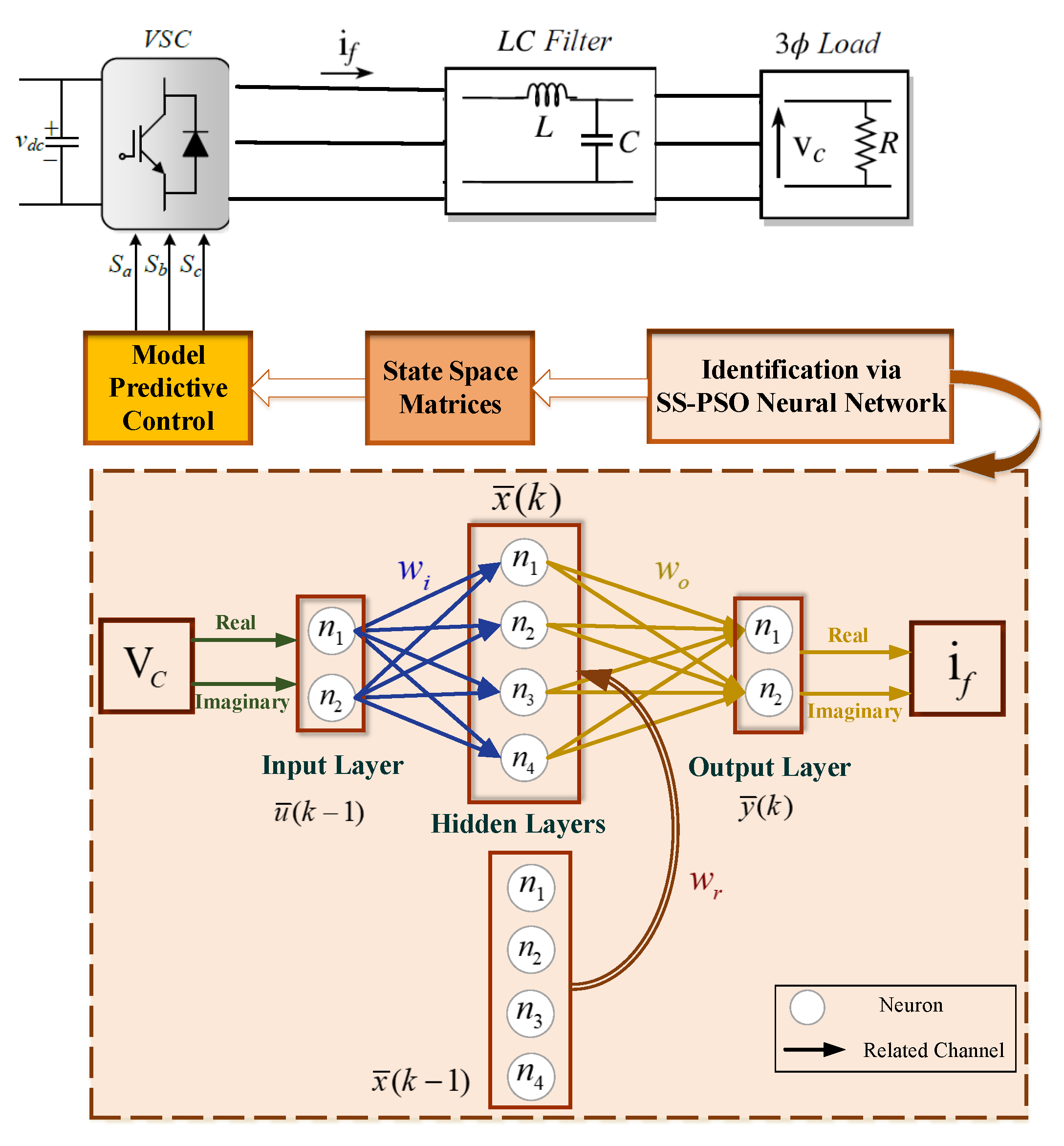
3. Proposed ssNN-PSO-Based PC
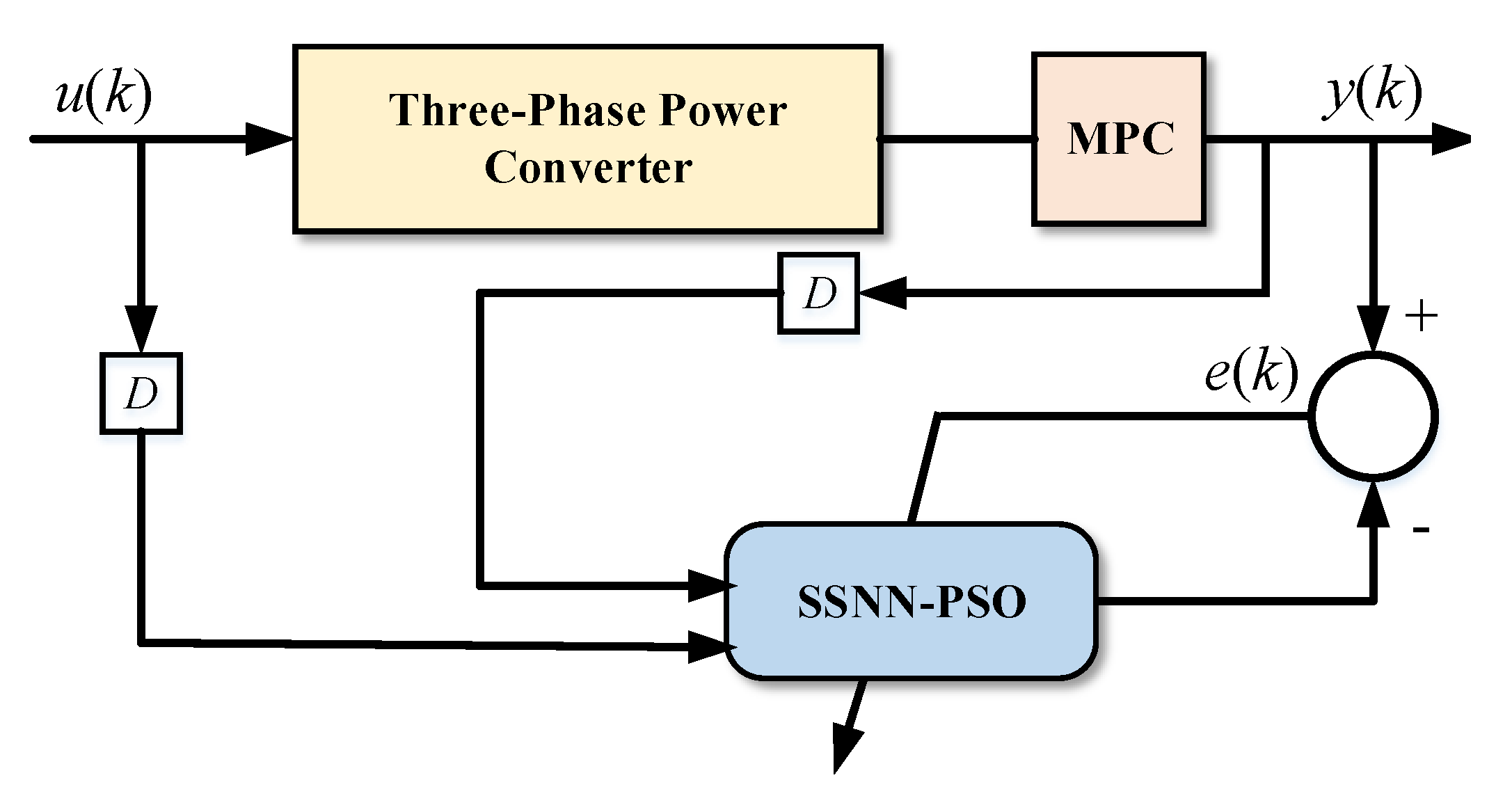
3.1. Identification Methodology
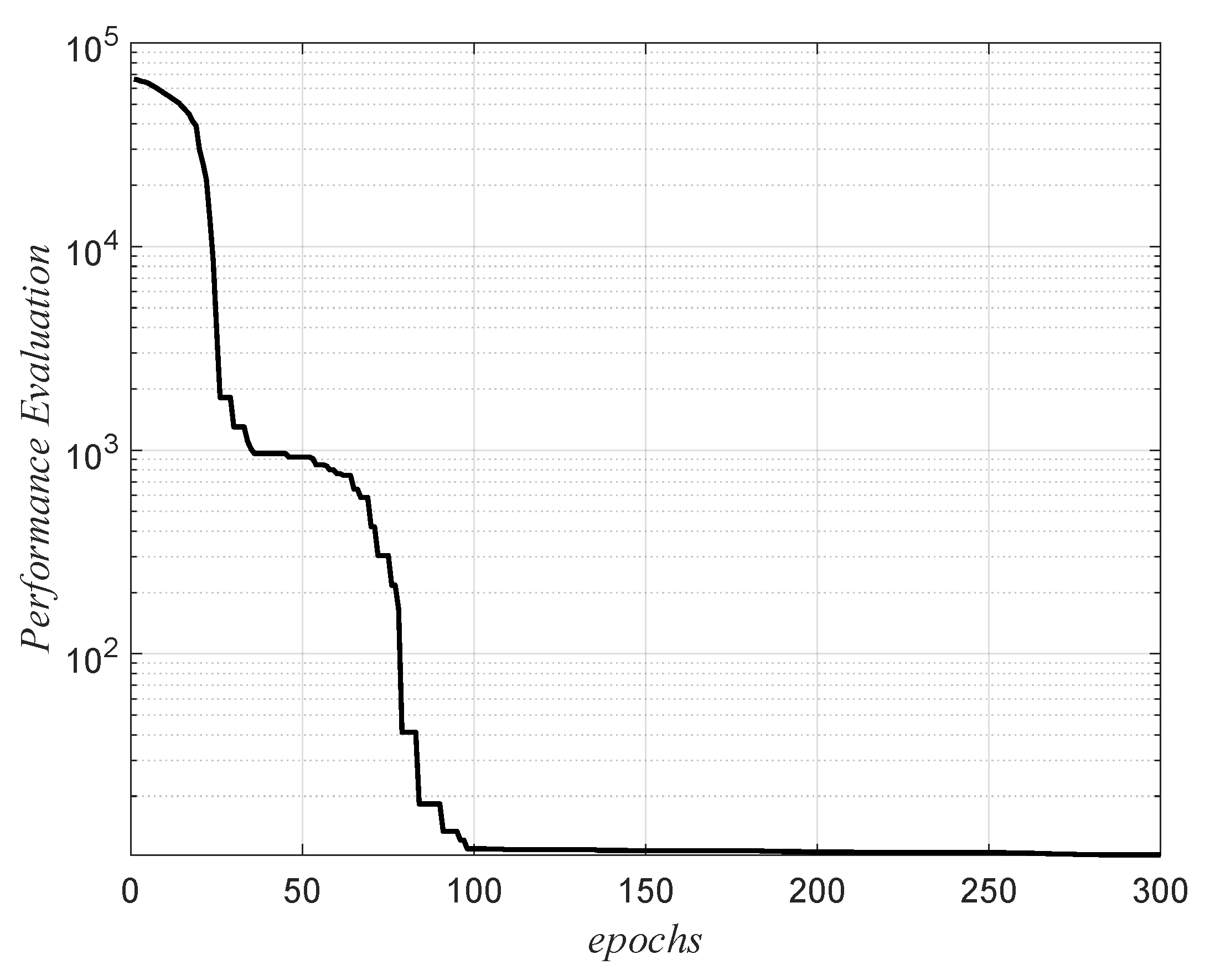
3.2. Description of Learning Algorithm
4. Simulation Results and Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Christensen, P.; Andersen, G.K.; Seidel, M.; Bolik, S.; Engelken, S.; Knueppel, T.; Krontiris, A.; Wuerflinger, K.; Bülo, T.; Jahn, J.; et al. High Penetration of Power Electronic Interfaced Power Sources (HPoPEIPS)-ENTSO-E Guidance Document for National Implementation for Network Codes on Grid Connection; ENTSO-E Tech. Rep.; 2020; pp. 1–61. Available online: https://strathprints.strath.ac.uk/72581/ (accessed on 19 April 2021).
- Charlotte Unger Larson 100 Percent Renewable Electricity by 2040; Swedish Wind Energy Association: Stockholm, Sweden, 2019.
- Dragičević, T. Model Predictive Control of Power Converters for Robust and Fast Operation of AC Microgrids. IEEE Trans. Power Electron. 2017, 33, 6304–6317. [Google Scholar] [CrossRef]
- Rodriguez, J.; Pontt, J.; Silva, C.A.; Correa, P.; Lezana, P.; Cortes, P.; Ammann, U. Predictive Current Control of a Voltage Source Inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Heydari, R.; Gheisarnejad, M.; Khooban, M.H.; Dragicevic, T.; Blaabjerg, F. Robust and Fast Voltage-Source-Converter (VSC) Control for Naval Shipboard Microgrids. IEEE Trans. Power Electron. 2019, 34, 8299–8303. [Google Scholar] [CrossRef] [Green Version]
- Heydari, R.; Khayat, Y.; Amiri, A.; Dragicevic, T.; Shafiee, Q.; Popovski, P.; Blaabjerg, F. Robust High-Rate Secondary Control of Microgrids with Mitigation of Communication Impairments. IEEE Trans. Power Electron. 2020, 35, 12486–12496. [Google Scholar] [CrossRef]
- Khayat, Y.; Shafiee, Q.; Heydari, R.; Naderi, M.; Dragičević, T.; Simpson-Porco, J.W.; Dörfler, F.; Fathi, M.; Blaabjerg, F.; Guerrero, J.M.; et al. On the Secondary Control Architectures of AC Microgrids: An Overview. IEEE Trans. Power Electron. 2020, 35, 6482–6500. [Google Scholar] [CrossRef]
- Hu, J.; Shan, Y.; Guerrero, J.M.; Ioinovici, A.; Chan, K.W.; Rodriguez, J. Model predictive control of microgrids–An overview. Renew. Sustain. Energy Rev. 2021, 136, 110422. [Google Scholar] [CrossRef]
- Heydari, R.; Dragicevic, T.; Blaabjerg, F. High-bandwidth Secondary Voltage and Frequency Control of VSC-based AC Microgrid. IEEE Trans. Power Electrons. 2019, 34, 11320–11331. [Google Scholar] [CrossRef] [Green Version]
- Heyderi, R.; Alhasheem, M.; Dragicevic, T.; Blaabjerg, F. Model predictive control approach for distributed hierarchical control of vsc-based microgrids. In Proceedings of the 2018 20th European Conference on Power Electronics and Applications (EPE’18 ECCE Europe), Riga, Latvia, 17–21 September 2018; p. P-1. [Google Scholar]
- Vasilakis, A.; Zafeiratou, I.; Lagos, D.T.; Hatziargyriou, N.D. The Evolution of Research in Microgrids Control. IEEE Open Access J. Power Energy 2020, 7, 331–343. [Google Scholar] [CrossRef]
- Borreggine, S.; Monopoli, V.G.; Rizzello, G.; Naso, D.; Cupertino, F.; Consoletti, R. A review on model predictive control and its applications in power electronics. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 2–4 July 2019; pp. 1–6. [Google Scholar]
- Kouro, S.; Cortés, P.; Vargas, R.; Ammann, U.; Rodríguez, J. Model predictive control—A simple and powerful method to control power converters. IEEE Trans. Ind. Electron. 2008, 56, 1826–1838. [Google Scholar] [CrossRef]
- Vasquez, J.C.; Guerrero, J.M.; Savaghebi, M.; Eloy-Garcia, J.; Teodorescu, R. Modeling, analysis, and design of stationary-reference-frame droop-controlled parallel three-phase voltage source inverters. IEEE Trans. Ind. Electron. 2013, 60, 1271–1280. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Inform. 2012, 9, 1003–1016. [Google Scholar] [CrossRef]
- Chen, J.; Chen, Y.; Tong, L.; Peng, L.; Kang, Y. A Backpropagation Neural Network-Based Explicit Model Predictive Control for DC–DC Converters With High Switching Frequency. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 2124–2142. [Google Scholar] [CrossRef]
- Lucia, S.; Navarro, D.; Karg, B.; Sarnago, H.; Lucia, O. Deep learning-based model predictive control for resonant power converters. IEEE Trans. Ind. Inform. 2020, 17, 409–420. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Dragicevic, T.; Gao, Y.; Teodorescu, R. Neural Network based Model Predictive Controllers for Modular Multilevel Converters. IEEE Trans. Energy Convers. 2020, 1–10. [Google Scholar] [CrossRef]
- Sarali, D.S.; Selvi, V.A.I.; Pandiyan, K. An Improved Design for Neural-Network-Based Model Predictive Control of Three-Phase Inverters. In Proceedings of the 2019 IEEE International Conference on Clean Energy and Energy Efficient Electronics Circuit for Sustainable Development (INCCES), Krishnankoil, India, 18–20 December 2019; pp. 1–5. [Google Scholar]
- Mohamed, I.S.; Rovetta, S.; Do, T.D.; Dragicević, T.; Diab, A.A.Z. A neural-network-based model predictive control of three-phase inverter with an output LC filter. IEEE Access 2019, 7, 124737–124749. [Google Scholar] [CrossRef]
- Gardezi, M.S.M.; Hasan, A. Machine learning based adaptive prediction horizon in finite control set model predictive control. IEEE Access 2018, 6, 32392–32400. [Google Scholar] [CrossRef]
- Dragičević, T.; Novak, M. Weighting factor design in model predictive control of power electronic converters: An artificial neural network approach. IEEE Trans. Ind. Electron. 2018, 66, 8870–8880. [Google Scholar] [CrossRef] [Green Version]
- Mohamed-Seghir, M.; Krama, A.; Refaat, S.S.; Trabelsi, M.; Abu-Rub, H. Artificial Intelligence-Based Weighting Factor Autotuning for Model Predictive Control of Grid-Tied Packed U-Cell Inverter. Energies 2020, 13, 3107. [Google Scholar] [CrossRef]
- Carlet, P.G.; Tinazzi, F.; Bolognani, S.; Zigliotto, M. An effective model-free predictive current control for synchronous reluctance motor drives. IEEE Trans. Ind. Appl. 2019, 55, 3781–3790. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.K.; Liu, T.H.; Fu, L.C.; Hsiao, C.F. Model-free predictive current control for interior permanent-magnet synchronous motor drives based on current difference detection technique. IEEE Trans. Ind. Electron. 2013, 61, 667–681. [Google Scholar] [CrossRef]
- Lin, C.K.; Lai, Y.S.; Yu, H.C. Improved model-free predictive current control for synchronous reluctance motor drives. IEEE Trans. Ind. Electron. 2016, 63, 3942–3953. [Google Scholar] [CrossRef]
- Khalilzadeh, M.; Vaez-Zadeh, S.; Eslahi, M.S. Parameter-free predictive control of IPM motor drives with direct selection of optimum inverter voltage vectors. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 9, 327–334. [Google Scholar] [CrossRef]
- Rodriguez, J.; Heydari, R.; Rafiee, Z.; Young, H.A.; Flores-Bahamonde, F.; Shahparasti, M. Model-Free Predictive Current Control of a Voltage Source Inverter. IEEE Access 2020, 8, 211104–211114. [Google Scholar] [CrossRef]
- Heydari, R.; Young, H.; Rafiee, Z.; Flores-Bahamonde, F.; Savaghebi, M.; Rodriguez, J. Model-Free Predictive Current Control of a Voltage Source Inverter based on Identification Algorithm. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 1–6. [Google Scholar]
- Amoura, K.; Wira, P.; Djennoune, S. A State-space Neural Network for Modeling Dynamical Nonlinear Systems. In Proceedings of the IJCCI (NCTA), International Conference on Neural Computation Theory and Applications, Paris, France, 24–26 October 2011; pp. 369–376. [Google Scholar]
- Song, Y.; Chen, Z.; Yuan, Z. New chaotic PSO-based neural network predictive control for nonlinear process. IEEE Trans. Neural Netw. 2007, 18, 595–601. [Google Scholar] [CrossRef] [PubMed]
- Moumouh, H.; Langlois, N.; Haddad, M. A Novel Tuning approach for MPC parameters based on Artificial Neural Network. In Proceedings of the 2019 IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, UK, 16–19 July 2019; pp. 1638–1643. [Google Scholar]
- Shi, H.; Wen, H.; Chen, J.; Hu, Y.; Jiang, L.; Chen, G. Minimum-reactive-power scheme of dual-active-bridge DC–DC converter with three-level modulated phase-shift control. IEEE Trans. Ind. Appl. 2017, 53, 5573–5586. [Google Scholar] [CrossRef] [Green Version]
- Chiasson, J.N.; Tolbert, L.M.; McKenzie, K.J.; Du, Z. A unified approach to solving the harmonic elimination equations in multilevel converters. IEEE Trans. Power Electron. 2004, 19, 478–490. [Google Scholar] [CrossRef]
- Meng, L.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Tertiary and secondary control levels for efficiency optimization and system damping in droop controlled DC–DC converters. IEEE Trans. Smart Grid 2015, 6, 2615–2626. [Google Scholar] [CrossRef] [Green Version]
- Shi, H.; Wen, H.; Hu, Y.; Jiang, L. Reactive power minimization in bidirectional DC–DC converters using a unified-phasor-based particle swarm optimization. IEEE Trans. Power Electron. 2018, 33, 10990–11006. [Google Scholar] [CrossRef]
- Sabzevari, S.; Karimpour, A.; Monfared, M.; Naghibi Sistani, M.B. MPPT control of wind turbines by direct adaptive fuzzy-PI controller and using ANN-PSO wind speed estimator. J. Renew. Sustain. Energy 2017, 9, 013302. [Google Scholar] [CrossRef]
- Heydari, R.; Khayat, Y.; Naderi, M.; Anvari-Moghaddam, A.; Dragicevic, T.; Blaabjerg, F. A decentralized adaptive control method for frequency regulation and power sharing in autonomous microgrids. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 2427–2432. [Google Scholar]
- Cortes, P.; Rodriguez, J.; Quevedo, D.E.; Silva, C. Predictive Current Control Strategy With Imposed Load Current Spectrum. IEEE Trans. Power Electron. 2008, 23, 612–618. [Google Scholar] [CrossRef]
- Lin, X.; Xi, W.; Dai, J.; Wang, C.; Wang, Y. Prediction of Slag Characteristics Based on Artificial Neural Network for Molten Gasification of Hazardous Wastes. Energies 2020, 13, 5115. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Peak AC voltage, | 200 [V] |
| Sampling rate, | 40 [kHz] |
| System frequency, | 50 [Hz] |
| Load parameter (resistance), | 10 [] |
| Load parameter (inductance), | 10 [mH] |
| Load parameter (nominal current), | 10 [A] |
| Maximum of weight factor, | 0.9 |
| Minimum of weight factor, | 0.4 |
| Acceleration coefficients, | 2 |
| Mismatch Parameters | MSE (A) (Conventional MPC) | MSE (A) (ssNN-PSO Based PC) |
|---|---|---|
| () | 0.252 | 0.100 |
| () | 0.006 | 0.015 |
| () | 0.281 | 0.094 |
| () | 0.822 | 0.122 |
| () | 2.096 | 0.289 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sabzevari, S.; Heydari, R.; Mohiti, M.; Savaghebi, M.; Rodriguez, J. Model-Free Neural Network-Based Predictive Control for Robust Operation of Power Converters. Energies 2021, 14, 2325. https://doi.org/10.3390/en14082325
Sabzevari S, Heydari R, Mohiti M, Savaghebi M, Rodriguez J. Model-Free Neural Network-Based Predictive Control for Robust Operation of Power Converters. Energies. 2021; 14(8):2325. https://doi.org/10.3390/en14082325
Chicago/Turabian StyleSabzevari, Sanaz, Rasool Heydari, Maryam Mohiti, Mehdi Savaghebi, and Jose Rodriguez. 2021. "Model-Free Neural Network-Based Predictive Control for Robust Operation of Power Converters" Energies 14, no. 8: 2325. https://doi.org/10.3390/en14082325
APA StyleSabzevari, S., Heydari, R., Mohiti, M., Savaghebi, M., & Rodriguez, J. (2021). Model-Free Neural Network-Based Predictive Control for Robust Operation of Power Converters. Energies, 14(8), 2325. https://doi.org/10.3390/en14082325