
Frequency Analysis of Partial Short-Circuit Fault in BLDC Motors with Combined Star-Delta Winding †


Abstract
:1. Introduction
2. Analysis of the Winding Configuration
2.1. Star, Delta and Star-Delta Windings Configuration
2.2. Static Characteristics
2.3. Induced Voltage
3. Mathematical Model of the Stator Short-Circuit in BLDC Motor with Star-Delta Winding
- -
- symmetric cylindrical stator and permanent magnet type rotor, linear magnetic circuit, cogging and reluctance torques are neglected,
- -
- short-circuit of the Y winding coils in phase 1 (YΔ configuration) with current and BEMF voltage , respectively,
- -
- the short-circuit parameters are referred as -resistance, -inductance.
3.1. No-Constraints Phase Voltages, Three-Phase BLDC Star-Delta Model
3.2. Final Star-Delta Winding Configuration Line Voltage Model
4. Discussion Comparative Analysis, Simulations and Experimental Verifications
4.1. Y-Star Configuration, Transient Analysis at Healthy Mode and under Short-Circuit Fault
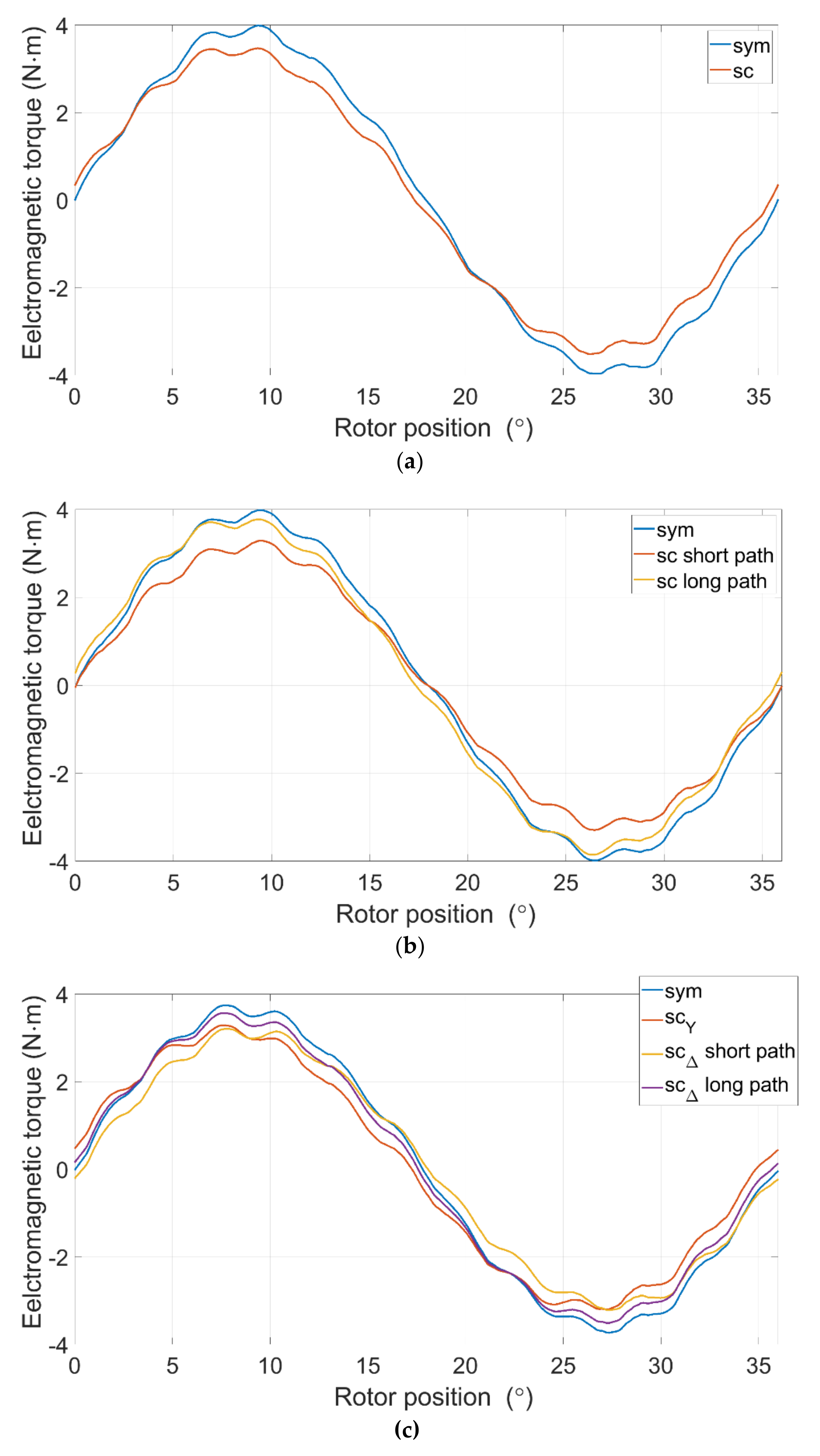
4.1.1. Waveforms of Electromagnetic Torque and Currents
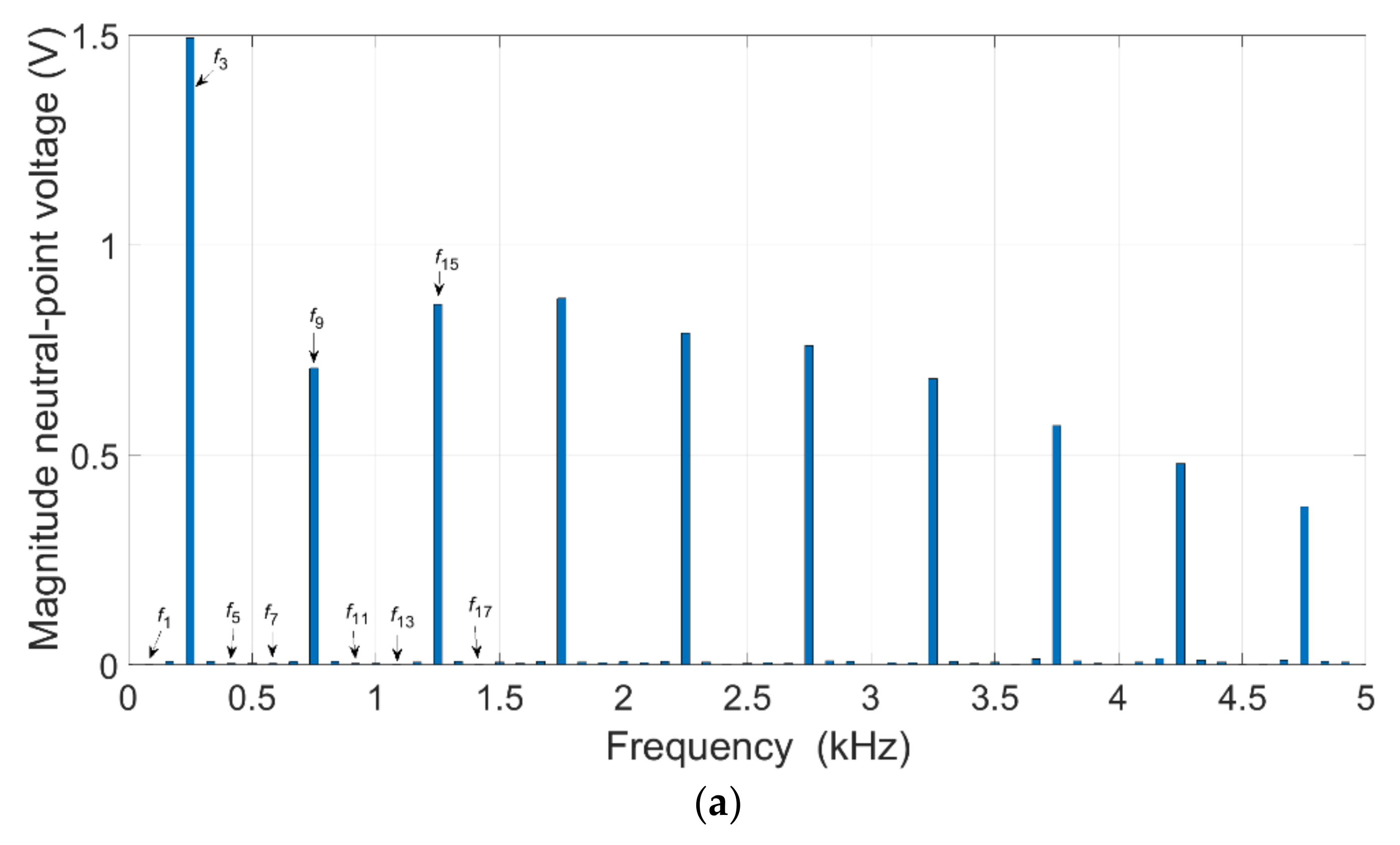
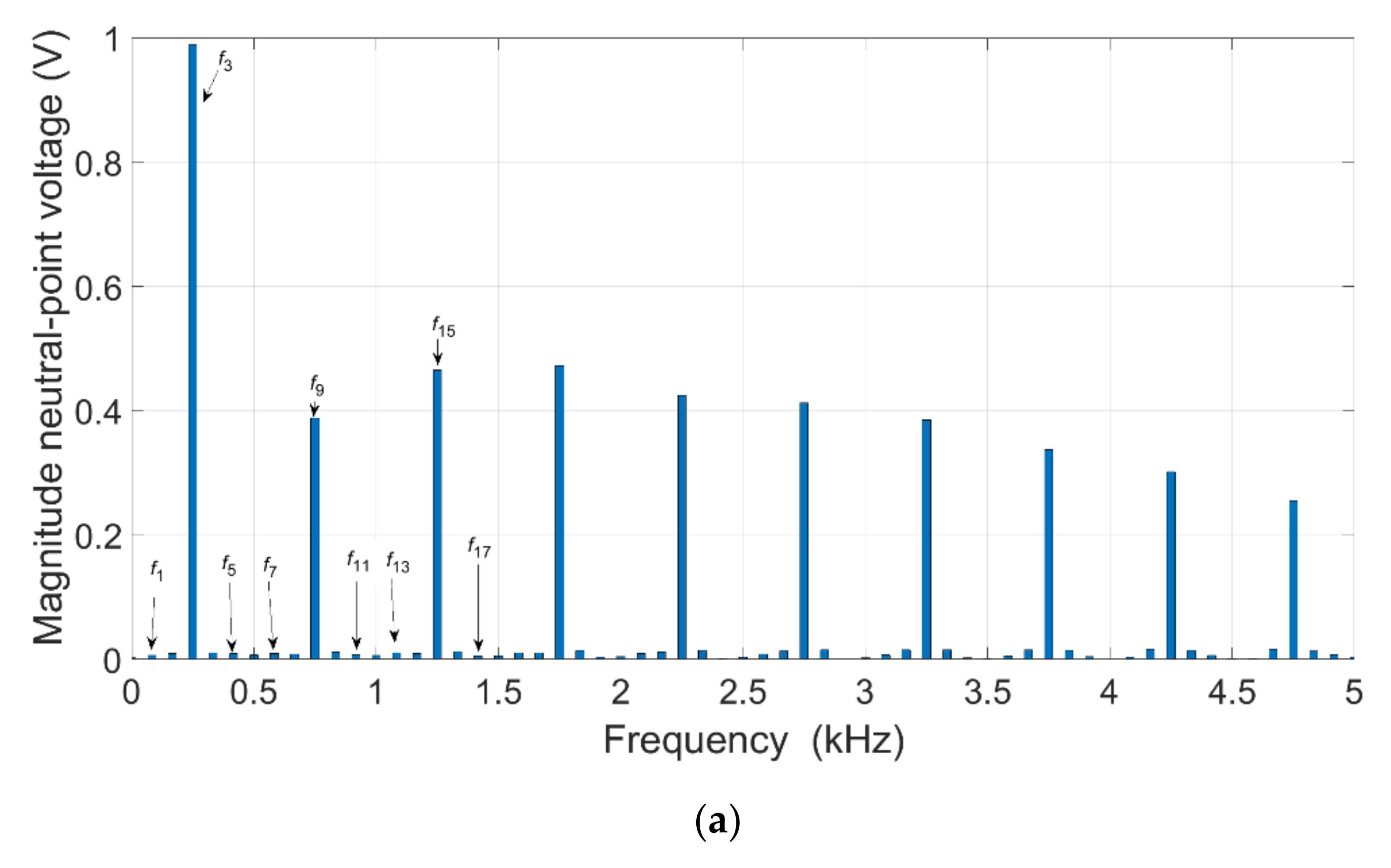
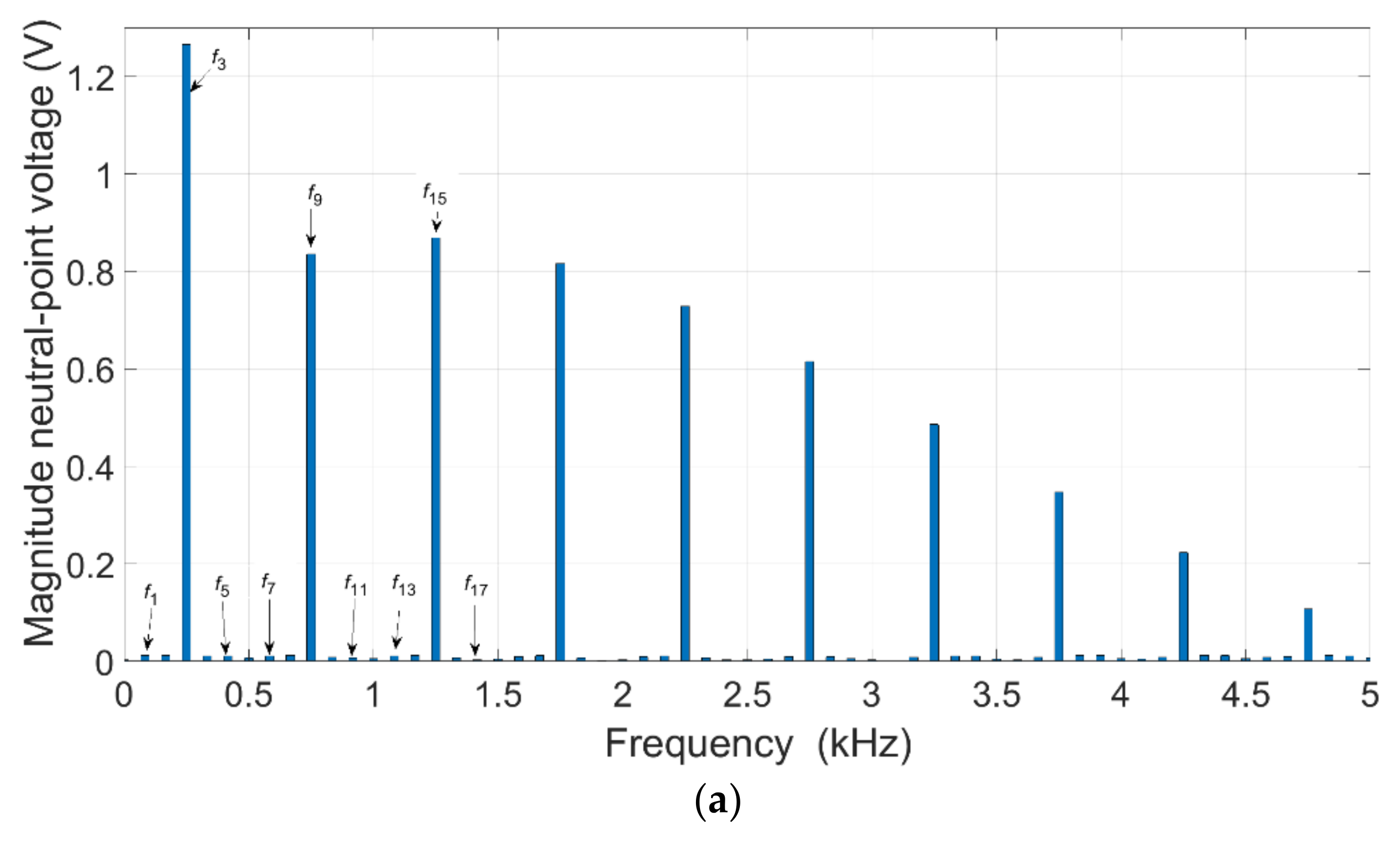
4.1.2. Y-FFT of u0
4.2. Delta Configuration, Transient Analysis at Healthy Mode and under Short-Circuit Fault
4.2.1. Waveforms of Electromagnetic Torque and Currents
4.2.2. FFT of u0
4.3. Y△—Star-Delta Configuration, Transient Analysis at Healthy Mode and under Short-Circuit Fault
4.3.1. Waveforms of Electromagnetic Torque and Currents
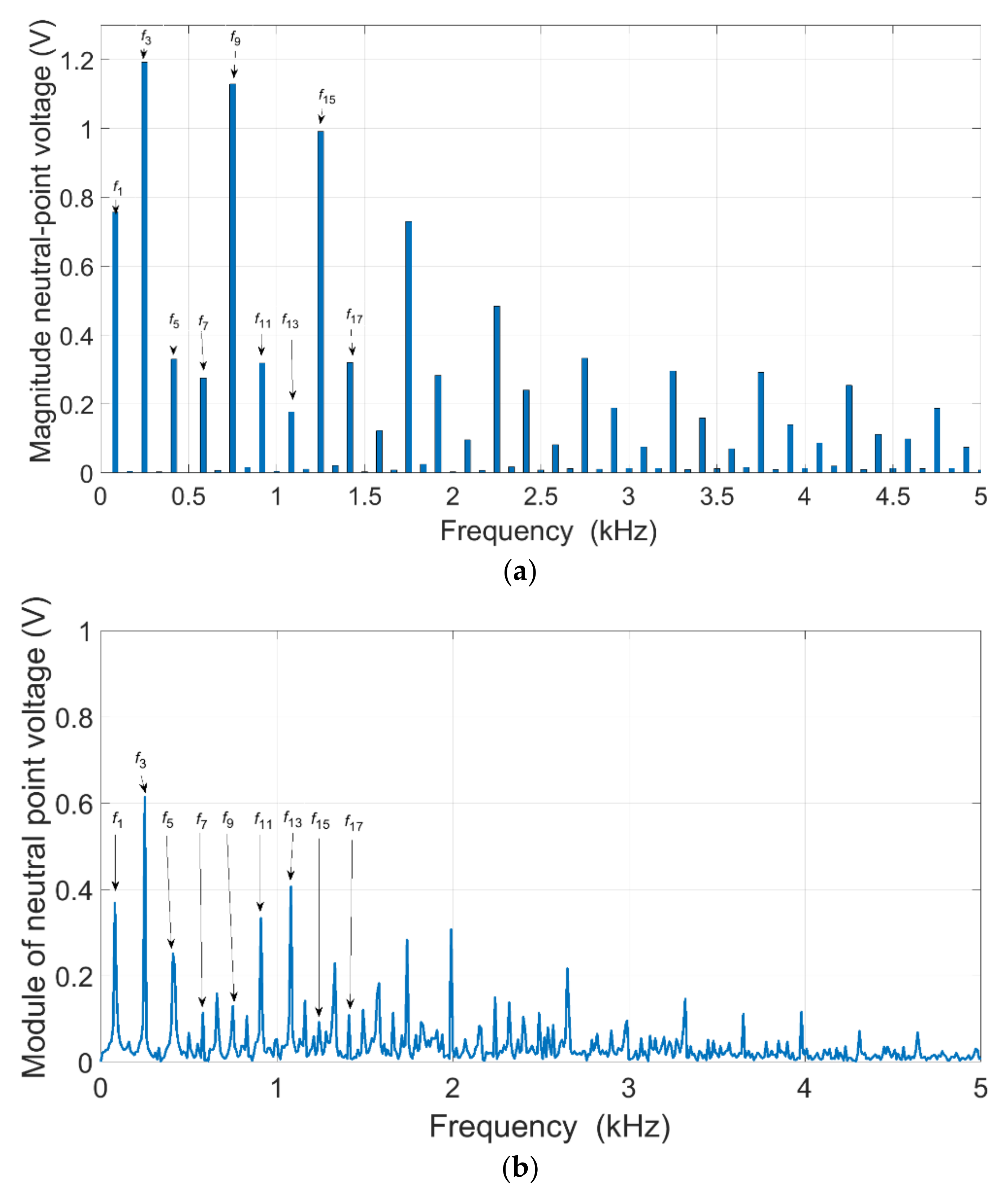
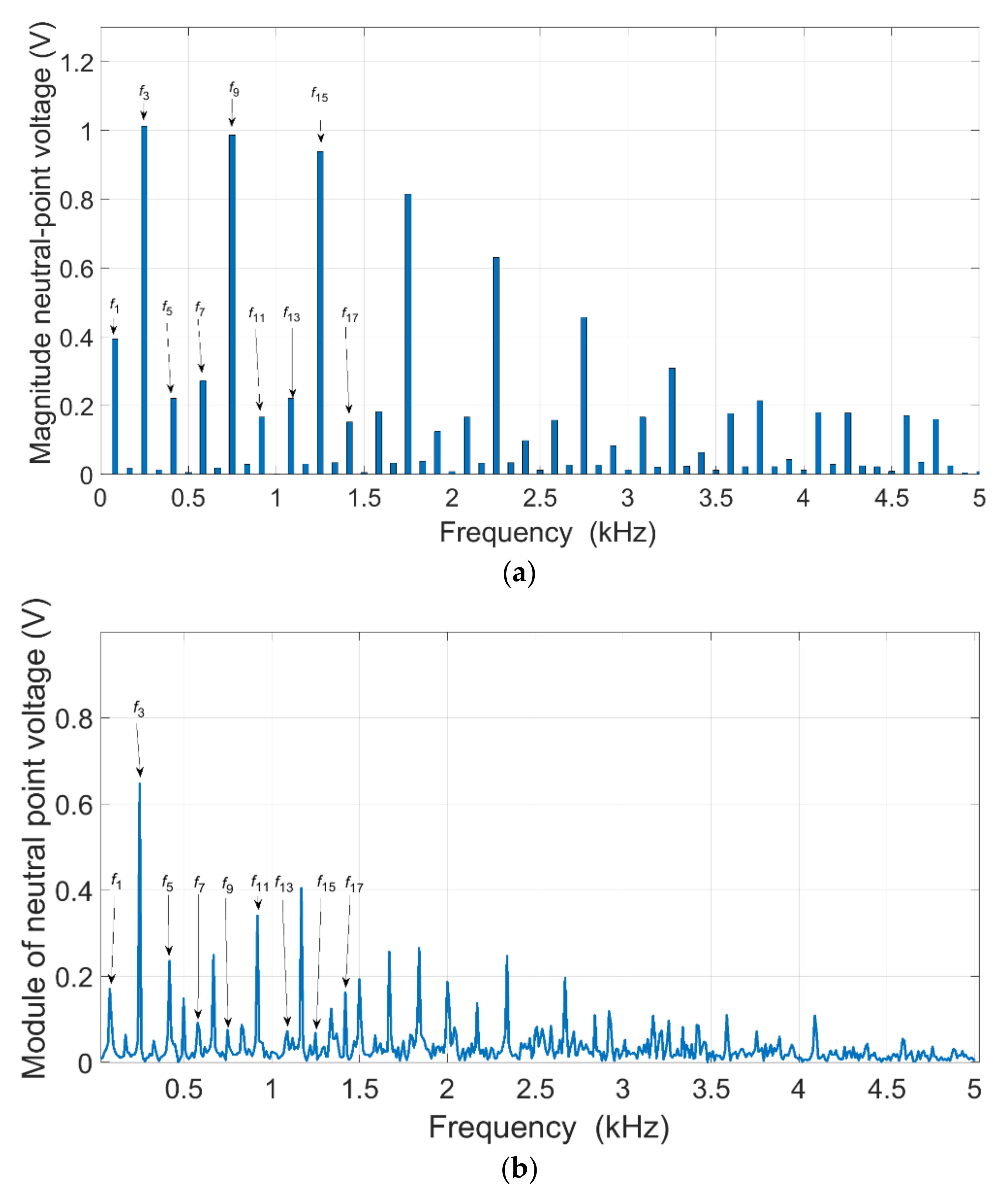
4.3.2. Y△—FFT of u0
5. Comparative Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, R.; Lu, M.; Jiang, N.; Cheng, M. Comparison between Linear Induction Motor and Linear Flux-Switching Permanent-Magnet Motor for Railway Transportation. IEEE Trans. Ind. Electron. 2019, 66, 9394–9405. [Google Scholar] [CrossRef]
- McElveen, R.F.; Holub, R.A.; Martin, W.E. Replacing Induction Motors with Caged-Rotor Permanent Magnet Motors: Application Considerations and Cost Analysis. IEEE Ind. Appl. Mag. 2020, 26, 67–75. [Google Scholar] [CrossRef]
- Marcic, T.; Stumberger, B.; Stumberger, G. Comparison of Induction Motor and Line-Start IPM Synchronous Motor Performance in a Variable-Speed Drive. IEEE Trans. Ind. Appl. 2012, 48, 2341–2352. [Google Scholar] [CrossRef]
- Melfi, M.J.; Evon, S.; McElveen, R. Induction versus permanent magnet motors. IEEE Ind. Appl. Mag. 2009, 15, 28–35. [Google Scholar] [CrossRef]
- Ni, R.; Xu, D.; Wang, G.; Gui, X.; Zhang, G.; Zhan, H.; Li, C. Efficiency Enhancement of General AC Drive System by Remanufacturing Induction Motor with Interior Permanent-Magnet Rotor. IEEE Trans. Ind. Electron. 2016, 63, 808–820. [Google Scholar] [CrossRef]
- Wang, H.; Li, J.; Qu, R.; Lai, J.; Huang, H.; Liu, H. Study on High Efficiency Permanent Magnet Linear Synchronous Motor for Maglev. IEEE Trans. Appl. Supercond. 2018, 28, 0601005. [Google Scholar] [CrossRef]
- Chin, J.-W.; Cha, K.-S.; Park, M.-R.; Park, S.-H.; Lee, E.-C.; Lim, M.-S. High Efficiency PMSM with High Slot Fill Factor Coil for Heavy-Duty EV Traction Considering AC Resistance. IEEE Trans. Energy Convers. 2021, 36, 883–894. [Google Scholar] [CrossRef]
- Hwang, Y.-H.; Lee, J. HEV Motor Comparison of IPMSM With Nd Sintered Magnet and Heavy Rare-Earth Free Injection Magnet in the Same Size. IEEE Trans. Appl. Supercond. 2018, 28, 5206405. [Google Scholar] [CrossRef]
- Park, Y.; Kim, H.; Jang, H.; Ham, S.-H.; Lee, J.; Jung, D.-H. Efficiency Improvement of Permanent Magnet BLDC with Halbach Magnet Array for Drone. IEEE Trans. Appl. Supercond. 2020, 30, 5201405. [Google Scholar] [CrossRef]
- Jiang, X.; Huang, W.; Cao, R.; Hao, Z.; Jiang, W. Electric Drive System of Dual-Winding Fault-Tolerant Permanent-Magnet Motor for Aerospace Applications. IEEE Trans. Ind. Electron. 2015, 62, 7322–7330. [Google Scholar] [CrossRef]
- Sarigiannidis, A.G.; Beniakar, M.E.; Kakosimos, P.E.; Kladas, A.G.; Papini, L.; Gerada, C. Fault Tolerant Design of Fractional Slot Winding Permanent Magnet Aerospace Actuator. IEEE Trans. Transp. Electrif. 2016, 2, 380–390. [Google Scholar] [CrossRef]
- Bosso, A.; Conficoni, C.; Raggini, D.; Tilli, A. A Computational-Effective Field-Oriented Control Strategy for Accurate and Efficient Electric Propulsion of Unmanned Aerial Vehicles. IEEE/ASME Trans. Mechatron. 2021, 26, 1501–1511. [Google Scholar] [CrossRef]
- Lee, S.-T.; Hur, J. Detection Technique for Stator Inter-Turn Faults in BLDC Motors Based on Third-Harmonic Components of Line Currents. IEEE Trans. Ind. Appl. 2017, 53, 143–150. [Google Scholar] [CrossRef]
- Zhou, Y.; Lin, X.; Cheng, M. A Fault-Tolerant Direct Torque Control for Six-Phase Permanent Magnet Synchronous Motor with Arbitrary Two Opened Phases Based on Modified Variables. IEEE Trans. Energy Convers. 2016, 31, 549–556. [Google Scholar] [CrossRef]
- Zhao, W.; Wu, B.; Chen, Q.; Zhu, J. Fault-Tolerant Direct Thrust Force Control for a Dual Inverter Fed Open-End Winding Linear Vernier Permanent-Magnet Motor Using Improved SVPWM. IEEE Trans. Ind. Electron. 2018, 65, 7458–7467. [Google Scholar] [CrossRef]
- Huang, W.; Hua, W.; Chen, F.; Yin, F.; Qi, J. Model Predictive Current Control of Open-Circuit Fault-Tolerant Five-Phase Flux-Switching Permanent Magnet Motor Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1840–1849. [Google Scholar] [CrossRef]
- Ullah, Z.; Hur, J. A Comprehensive Review of Winding Short Circuit Fault and Irreversible Demagnetization Fault Detection in PM Type Machines. Energies 2018, 11, 3309. [Google Scholar] [CrossRef] [Green Version]
- Jafari, A.; Faiz, J.; Jarrahi, M.A. A Simple and Efficient Current-Based Method for Interturn Fault Detection in BLDC Motors. IEEE Trans. Ind. Inform. 2021, 17, 2707–2715. [Google Scholar] [CrossRef]
- Shifat, T.A.; Hur, J.-W. ANN Assisted Multi Sensor Information Fusion for BLDC Motor Fault Diagnosis. IEEE Access 2021, 9, 9429–9441. [Google Scholar] [CrossRef]
- Nejjari, H.; Benbouzid, M.E.H. Monitoring and diagnosis of induction motors electrical faults using a current Park’s vector pattern learning approach. IEEE Trans. Ind. Appl. 2000, 36, 730–735. [Google Scholar] [CrossRef]
- Awadallah, M.; Morcos, M. Diagnosis of stator short circuits in brushless DC motors by monitoring phase voltages. IEEE Trans. Energy Convers. 2005, 20, 246–247. [Google Scholar] [CrossRef]
- Siddique, A.; Yadava, G.; Singh, B. A review of stator fault monitoring techniques of induction motors. IEEE Trans. Energy Convers. 2005, 20, 106–114. [Google Scholar] [CrossRef]
- Yang, S. Online Stator Turn Fault Detection for Inverter-Fed Electric Machines Using Neutral Point Voltages Difference. IEEE Trans. Ind. Appl. 2016, 52, 4039–4049. [Google Scholar] [CrossRef]
- Jung, J.-H.; Lee, J.-J.; Kwon, B.-H. Online Diagnosis of Induction Motors Using MCSA. IEEE Trans. Ind. Electron. 2006, 53, 1842–1852. [Google Scholar] [CrossRef]
- Lee, S.B.; Hyun, D.; Kang, T.-j.; Yang, C.; Shin, S.; Kim, H.; Park, S.; Kong, T.-S.; Kim, H.-D. Identification of False Rotor Fault Indications Produced by Online MCSA for Medium-Voltage Induction Machines. IEEE Trans. Ind. Appl. 2016, 52, 729–739. [Google Scholar] [CrossRef]
- Korkosz, M.; Prokop, J.; Pakla, B.; Podskarbi, G.; Bogusz, P. Analysis of Open-Circuit Fault in Fault-Tolerant BLDC Motors with Different Winding Configurations. Energies 2020, 13, 5321. [Google Scholar] [CrossRef]
- Misir, O.; Raziee, S.M.; Hammouche, N.; Klaus, C.; Kluge, R.; Ponick, B. Prediction of Losses and Efficiency for Three-Phase Induction Machines Equipped With Combined Star–Delta Windings. IEEE Trans. Ind. Appl. 2017, 53, 3579–3587. [Google Scholar] [CrossRef]
- Lei, Y.; Zhao, Z.; Wang, S.; Dorrell, D.G.; Xu, W. Design and Analysis of Star–Delta Hybrid Windings for High-Voltage Induction Motors. IEEE Trans. Energy Convers. 2011, 58, 3758–3767. [Google Scholar]
- Ibrahim, M.N.F.; Rashad, E.; Sergeant, P. Performance Comparison of Conventional Synchronous Reluctance Machines and PM-Assisted Types with Combined Star–Delta Winding. Energies 2017, 10, 1500. [Google Scholar] [CrossRef]
- Korkosz, M.; Prokop, J.; Pakla, B.; Bogusz, P. Frequency analysis in fault detection of dual-channel BLDC motors with combined star-delta winding. IET Electr. Power Appl. 2021, 15, 824–836. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated voltage Udc | 52 VDC |
| Rated torque TL | 4 N·m |
| Rated speed n | 8000 rpm |
| Winding configuration | Delta |
| Number of parallel winding group | 4 |
| Number of turns per phase Nph | 120 |
| Number of shorted turns Nsc | 30 |
| Resistance of stator pole Rb | 0.035 Ω |
| Number of stator slots Ns | 24 |
| Number of poles p | 20 |
| Permanent magnet | N48SH |
| Type of rotor | outrunner |
| Air-gap δ | 0.45 mm |
| Rotor diameter Dr | 102 mm |
| Stator diameter Ds | 93.4 mm |
| Active length lFe | 25 mm |
| kT\Winding Configuration | Y [N⋅m/Arms] | Δ [N⋅m/Arms] | YΔ [N⋅m/Arms] |
|---|---|---|---|
| Symmetry | 0.37 | 0.21 | 0.28 |
| SC1 | 0.32 | - | 0.24 |
| SC2 | - | 0.15/0.19 | 0.24/0.27 |
| KE\Winding Configuration | Y | Δ | YΔ |
|---|---|---|---|
| [Vrms⋅s/rad] | [Vrms⋅s/rad] | [Vrms⋅s/rad] | |
| Symmetry | 0.402 | 0.23 | 0.263 |
| SC1-Ke12 | 0.35 | - | 0.255 |
| SC1-Ke23 | 0.408 | - | 0.305 |
| SC1-Ke31 | 0.353 | - | 0.253 |
| SC2-Ke12 | - | 0.217 | 0.277 |
| SC2-Ke23 | - | 0.221 | 0.297 |
| SC2-Ke31 | - | 0.186 | 0.261 |
| Parameter/Winding Configuration | Y | Δ | YΔ | ||||
|---|---|---|---|---|---|---|---|
| Sym | SC1 | Sym | SC2 | Sym | SC1 | SC2 | |
| TL [N·m] | 2 | 1.96 | 2.01 | 1.97 | 2.02 | 2.31 | 1.74 |
| σ [%] | 34.2 | 92.9 | 28.9 | 72.1 | 29.2 | 68.8 | 140 |
| I1RMS [A] | 4.31 | 7.81 | 7.67 | 12.04 | 6.08 | 12.1 | 8.74 |
| I2RMS [A] | 4.31 | 6.49 | 7.67 | 12.54 | 6.08 | 9.98 | 7.52 |
| I3RMS [A] | 4.31 | 6.78 | 7.67 | 12.54 | 6.08 | 10.16 | 9.2 |
| ISCRMS [A] | - | 23.79 | - | 22.87 | - | 22.85 | 22.85 |
| IDCav [A] | 5.07 | 7.96 | 9.06 | 14.36 | 7 | 11.78 | 9.61 |
| Parameter/Winding Configuration | Y | Δ | YΔ | ||||
|---|---|---|---|---|---|---|---|
| Sym | SC1 | Sym | SC2 | Sym | SC1 | SC2 | |
| Teav [N·m] | 2 | 1.88 | 2 | 1.77 | 2 | 1.94 | 1.66 |
| I1RMS [A] | 4.78 | 5.92 | 8.98 | 10.19 | 6.3 | 8.9 | 6.99 |
| I2RMS [A] | 4.73 | 6 | 8.26 | 10.19 | 6.2 | 7.9 | 7.5 |
| I3RMS [A] | 4.68 | 5.96 | 8.16 | 10.4 | 6.3 | 8.1 | 7.3 |
| ISCRMS [A] | - | 11.8 | - | 11.63 | - | 10.6 | 11.69 |
| vRMS[mm/s] | 0.2 | 0.3 | 0.19 | 0.34 | 0.17 | 0.36 | 0.36 |
| noisy [dB] | 59.7 | 68.1 | 59.5 | 67.3 | 59 | 67.3 | 67.4 |
| Harmonic/Winding Configuration | Y | Δ | YΔ | ||||
|---|---|---|---|---|---|---|---|
| Sym | SC1 | Sym | SC2 | Sym | SC1 | SC2 | |
| f1 [mV] | 2.7 | 691 | 6.4 | 453 | 12.4 | 756 | 394 |
| f3 [mV] | 1493 | 1018 | 988 | 715 | 1266 | 1193 | 1013 |
| f5 [mV] | 3.3 | 283 | 8.9 | 188 | 10.9 | 331 | 221 |
| f7 [mV] | 3.4 | 300 | 9.8 | 239 | 11.3 | 276 | 272 |
| f9 [mV] | 7.06 | 1063 | 388 | 589 | 836 | 1132 | 989 |
| f11 [mV] | 3.6 | 264 | 7.1 | 157 | 6.5 | 328 | 167 |
| f13 [mV] | 2.3 | 238 | 10.1 | 205 | 11.1 | 178 | 221 |
| f15 [mV] | 858 | 1115 | 465 | 583 | 869 | 995 | 942 |
| f17 [mV] | 2.2 | 278 | 5.3 | 144 | 2.9 | 321 | 153 |
| Harmonic/Winding Configuration | Y | Δ | YΔ | ||||
|---|---|---|---|---|---|---|---|
| Sym | SC1 | Sym | SC2 | Sym | SC1 | SC2 | |
| f1 [mV] | 62 | 290 | 37 | 173 | 50.7 | 157 | 170 |
| f3 [mV] | 1004 | 827 | 718 | 599 | 723 | 613 | 647 |
| f5 [mV] | 37 | 149 | 16 | 120 | 40 | 251 | 236 |
| f7 [mV] | 37 | 197 | 19 | 40 | 54 | 114 | 91 |
| f9 [mV] | 372 | 182 | 196 | 125 | 251 | 129 | 75 |
| f11 [mV] | 90 | 283 | 32 | 196 | 55 | 333 | 340 |
| f13 [mV] | 48 | 226 | 30 | 85 | 75 | 406 | 72 |
| f15 [mV] | 324 | 125 | 184 | 51.2 | 175 | 92 | 68 |
| f17 [mV] | 104 | 227 | 38 | 144 | 44 | 108 | 124 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korkosz, M.; Pakla, B.; Prokop, J. Frequency Analysis of Partial Short-Circuit Fault in BLDC Motors with Combined Star-Delta Winding. Energies 2022, 15, 196. https://doi.org/10.3390/en15010196
Korkosz M, Pakla B, Prokop J. Frequency Analysis of Partial Short-Circuit Fault in BLDC Motors with Combined Star-Delta Winding. Energies. 2022; 15(1):196. https://doi.org/10.3390/en15010196
Chicago/Turabian StyleKorkosz, Mariusz, Bartłomiej Pakla, and Jan Prokop. 2022. "Frequency Analysis of Partial Short-Circuit Fault in BLDC Motors with Combined Star-Delta Winding" Energies 15, no. 1: 196. https://doi.org/10.3390/en15010196
APA StyleKorkosz, M., Pakla, B., & Prokop, J. (2022). Frequency Analysis of Partial Short-Circuit Fault in BLDC Motors with Combined Star-Delta Winding. Energies, 15(1), 196. https://doi.org/10.3390/en15010196