1. Introduction
Since the Paris agreement was signed in 2015, countries around the world have been working intensively to save energy. Particularly, in the electric machine technical field, the high-efficiency motor has actively been researched. A permanent magnet synchronous motor (PMSM) using high-power density permanent magnets (PMs) has widely been used because the PMSM can make the high-efficiency and high-power density drive possible [
1,
2]. In addition to the efficiency and the power density, a wide driving range is one of the most important evaluation items of the motor used in automotive applications. Generally, a design that achieves both low-speed high-torque and high-speed low-torque operations is required. However, it is challenging to achieve these operations at the same time because the magnetic field of the PMSM is not adjustable. Conventionally, field weakening control has been applied to expand the high-speed operation range [
3,
4]. The field weakening control has traditionally employed and can undermine the magnetic field of the PMSM by using the negative
d-axis current
id. However, there is a problem whereby the copper loss increase in the high-speed operation range is not ignorable, because the field weakening control requires much current to give a counter magnetic field against the PM field. To make matters worse, the counter magnetic field generated by the negative
id may cause irreversible demagnetization of PMs in the rotor.
To solve this problem, in previous studies, an adjustable field PMSM that can control the PM-based magnetic field has been attracting attention in recent years [
5,
6,
7,
8,
9,
10,
11]. The adjustable field PMSM introduced in the references [
5,
6] can control the magnetic field density on the rotor surface with a consequent pole structure by using a field winding. However, it has low torque density as implemented in surface permanent magnet synchronous motor (SPMSM) configuration. As known well among the researchers, the SPM configuration does not have capability to generate a reluctance torque additional to the magnet torque. The PMs of the adjustable field SPMSM can easily demagnetize due to the long air gap length. In the reference [
7], the magnetic field passing through the magnetic leakage path on the rotor core is controlled by
q-axis magnetomotive force (m.m.f.). This adjustable field method can realize the magnetic field control with a single inverter, because the additional m.m.f. source is not required. As a result, the magnetic field is dependent on motor operation. The adjustable field principle utilizing the motor harmonics is described in the reference [
8]. This method uses the 2nd order space harmonics generated by the concentrated winding structure for the magnetic field control. However, this method cannot control the magnetic field actively and arbitrarily, because the rotating speed governs the quantity of the magnetic field. Furthermore, this motor must use soft magnetic composite (SMC) material, which is difficult to produce.
The adjustable field method proposed in the reference [
9] can make an expansive driving range possible, because this method can change the drive circuits that correspond to three-phase or six-phase windings, etc. However, multiple six single-phase inverters are indispensable to switch over the winding configurations. For this reason, there is a drawback that the drive system of this adjustable field PMSM can be larger than other conventional motors. Furthermore, this method has only four discrete magnetic field outputs, resulting in a discrete adjustment of the magnetic field. The IPMSM utilizing the de- and re-magnetization of the PMs can achieve wide-range control of the magnetic field and highly efficient drive [
10,
11]. However, the drive system for the adjustable field IPMSM based on this approach tends to be bulky, because an extremely high m.m.f. is indispensable for de- and re-magnetization. In general, several significant problems in existing adjustable field methods are the motor type, which cannot deliver the reluctance torque; detrimental influence on the motor operation and rotating speed; demagnetization of PMs; magnetic field controllability; difficulty in manufacturing; and high copper loss for magnetic field control.
The authors have been investigating a new adjustable field method focusing on the magnetic saturation of the magnetic material [
12]. The magnetic saturation is a phenomenon in which magnetic permeability changes according to the intensity of the external magnetic field. Typically, this phenomenon detrimentally affects the performance of the motor output in conventional motor drives [
13,
14]. In the reference [
13], it was confirmed, through the analysis, that d- and q-axis flux linkage and torque are affected by the magnetic saturation. In another reference about the influence of the magnetic saturation [
14], the relationship between the rotor bridge and the performance of a spoke-type PMSM was mathematically derived. In addition, it was revealed that the magnetic saturation in the bridge part has a significant influence on the motor performance. As mentioned above, the magnetic saturation usually deteriorates the motor output and complicates the design and the control.
As a novelty, the authors propose a motor with an adjustable field method utilizing the magnetic saturation (the proposed motor) in this paper to overcome disadvantages of the conventional field weakening control and the previous adjustable field methods. Detailed contributions of this paper are as follows:
- (1)
Adjustable field capability with genuine electromagnetic operation;
- (2)
Capability of the reluctance torque generation;
- (3)
Independency of the field adjustment on the motor operation (vector control) and the rotating speed;
- (4)
Higher anti-demagnetization capability of PMs;
- (5)
Continuous magnetic field control;
- (6)
Better productivity of the motor hardware;
- (7)
Lower copper loss for magnetic field control.
Finally, the proposed motor had a wider controllable range of the magnetic field by 51.7%.
In the following section, the principle of the proposed adjustable field method is introduced and explained in detail. Back e.m.f. characteristics are explained in
Section 3. The drive system of the prototype motor and its load characteristic test results are described in
Section 4 and
Section 5, respectively. Finally, the paper concludes in
Section 6 with some highlights of the research study.
2. Principle of Adjustable Field Method Utilizing Magnetic Saturation
As mentioned above, the proposed adjustable field method uses magnetic saturation of the magnetic material.
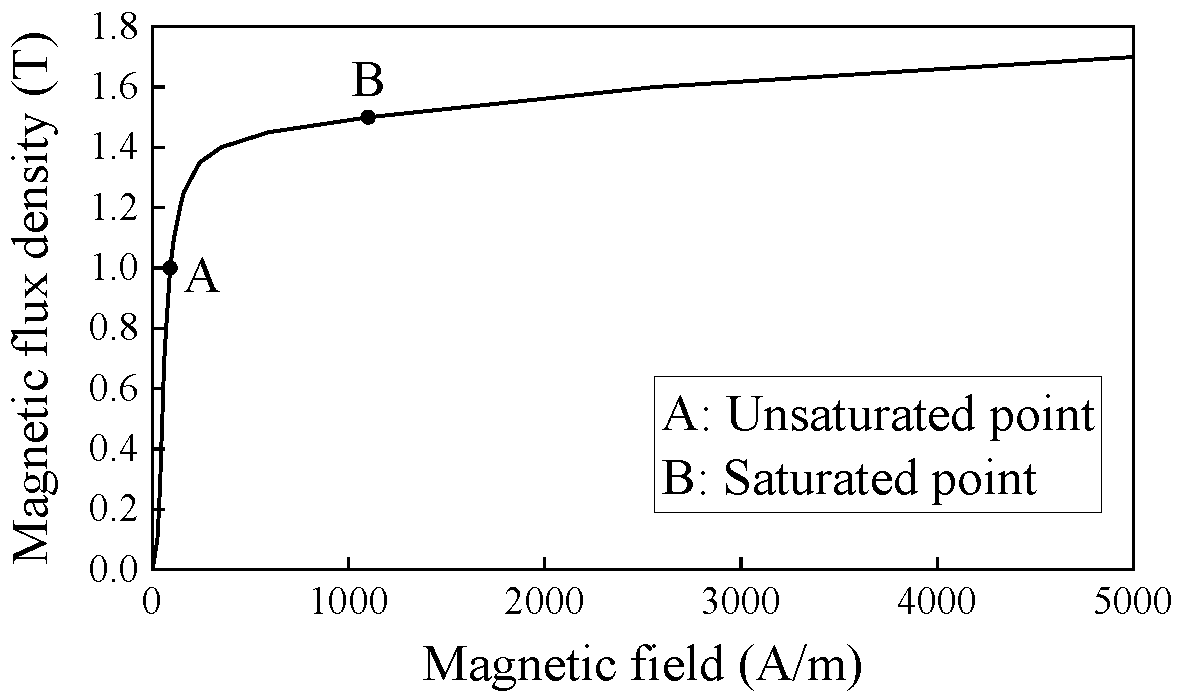
Figure 1 shows the relationship between the magnetic flux density and the magnetic field (B–H curve) of 35JNE230, used for the prototype motor’s core. The permeability is defined as a slope of the B–H characteristic. As shown in
Figure 1, the permeability of the core changes depending on the external magnetic field.
The magnetic circuit and specifications of the prototype motor are shown in
Figure 2 and
Table 1, respectively. As shown in
Figure 2, the prototype motor was an IPMSM. Therefore, the prototype motor could deliver the reluctance torque. The stator and rotor cores of the prototype motor were split into two parts and an additional winding was inserted between the split stator cores. The additional winding generated a magnetic flux to cause magnetic saturation and to control the magnetic field. There were magnetic leakage paths between PMs in the rotor core in the prototype motor. The magnetic flux modulated the permeability of the magnetic leakage paths. Therefore, the additional winding and the magnetic flux were called modulation winding and modulation flux, respectively. The resistance of the modulation winding was larger than that of the armature winding. The voltage drop and inductance became large by designing the modulation winding with a large resistance value. However, the voltage drop was negligibly small compared to the phase voltage and DC-bus voltage, so the effect was small. In addition, there was no effect of the large inductance because the DC modulation current was used. S45C, a carbon steel material, was used as the rotor shaft and the stator frame to penetrate the modulation flux in the 3-dimensional (3D) magnetic path. Generally, the iron loss in the 3D magnetic path was reduced by constructing the 3D path with an SMC [
15,
16]. However, it costs a lot to make the SMC core, because high pressure around 1000 MPa is indispensable [
17]. On the other hand, the proposed IPMSM could use a steel material as the 3D magnetic path because the modulation flux included only a DC or low-frequency component. For this reason, the 3D magnetic path could easily be realized.
Figure 3 shows a vector plot of the modulation flux when the m.m.f.
Fm used for magnetic field control was given to the modulation winding. In this paper, all analysis results were obtained from the FEM using JMAG-Designer. As shown in
Figure 3a, the modulation flux penetrated in the radial direction. There was a leakage flux passing through the air between the two stator cores, as shown in
Figure 3b. However, the amount of the leakage flux was negligibly small because the air gap between the two stator cores was 15 mm, which is much larger than the air gap length between the stator core and the rotor core. In addition, the rotor shaft and the stator frame were magnetized by the DC modulation flux, but the residual flux was negligibly small because S45C, which is a soft magnetic material, was used as the material for the rotor shaft and the stator frame.
It was confirmed, from
Figure 3, that the modulation flux penetrated in the radial direction. In the stator, no iron loss occurred because the modulation flux was DC flux. In addition, there was also no iron loss in the rotor due to the modulation flux.
Figure 4 was prepared to examine why iron loss did not occur in the rotor.
Figure 4a shows a usual DC flux and
Figure 4b shows a radial DC flux similar to the modulation flux. As shown in
Figure 4a, the observation point in front of the N-pole magnet was defined and the change in magnetic flux in the observation point was verified.
Figure 5 shows the magnetic flux fluctuations of the
d- and the
q-axis components. Usually, as can be seen in
Figure 5a, when the magnetic flux was transmitting, the magnetic flux component in the rotor fluctuated due to the rotation of the rotor, even if the magnetic flux was DC. On the other hand, as can be seen in
Figure 5b, when the magnetic flux penetrated in all radial directions, there was no variation in the magnetic flux with respect to time. From the above results, it can be inferred that there was no effect on iron loss when the DC modulation flux was used for the adjustable field.
Figure 6 shows vector plots of the PM flux and the modulation flux with an
Fm of 0 AT, 720 AT and 1200 AT. Without the
Fm, many PM fluxes leaked in the rotor core. In this case, the permeability of both the N- and S-pole side magnetic leakage path was 50. With an
Fm of 720 AT, the permeability of the N-pole side magnetic leakage path decreased to 24 by the modulation flux. Therefore, it became difficult for the N-pole PM flux to leak through the magnetic leakage path and the N-pole PM flux interlinking to the stator core increased. However, since the modulation flux penetrated in the direction weakening the N-pole magnet, it was necessary to study the de-magnetization of the N-pole PM. On the other hand, the permeability of the S-pole side magnetic leakage path increased to 3000 by the modulation flux. In this case, many modulation fluxes penetrated through the S-pole side magnetic leakage path and strengthened the magnetic field of the S-pole. With an
Fm of 1200 AT, the magnetic field of the proposed motor reached its limit, because the permeability of both the N- and S-pole side magnetic leakage paths decreased and the modulation flux could no longer penetrate. In this way, the proposed motor can realize magnetic field control by using magnetic saturation and modulating the permeability of the magnetic leakage paths.
Figure 7 shows the magnetic flux density in the air gap between the upper stator core and rotor core with an
Fm of 0 AT, 720 AT and 1200 AT. By giving the
Fm, the fundamental component increased. There are even-order components, however. Because the even-order components in the lower-side air gap were observed in the opposite phase with the even-order components in the upper-side air gap, no even-order component was generated in the back e.m.f. In addition, the DC component was also included in the gap magnetic flux density due to the radial modulation flux, but it did not affect the back e.m.f. because it did not vary with respect to time.
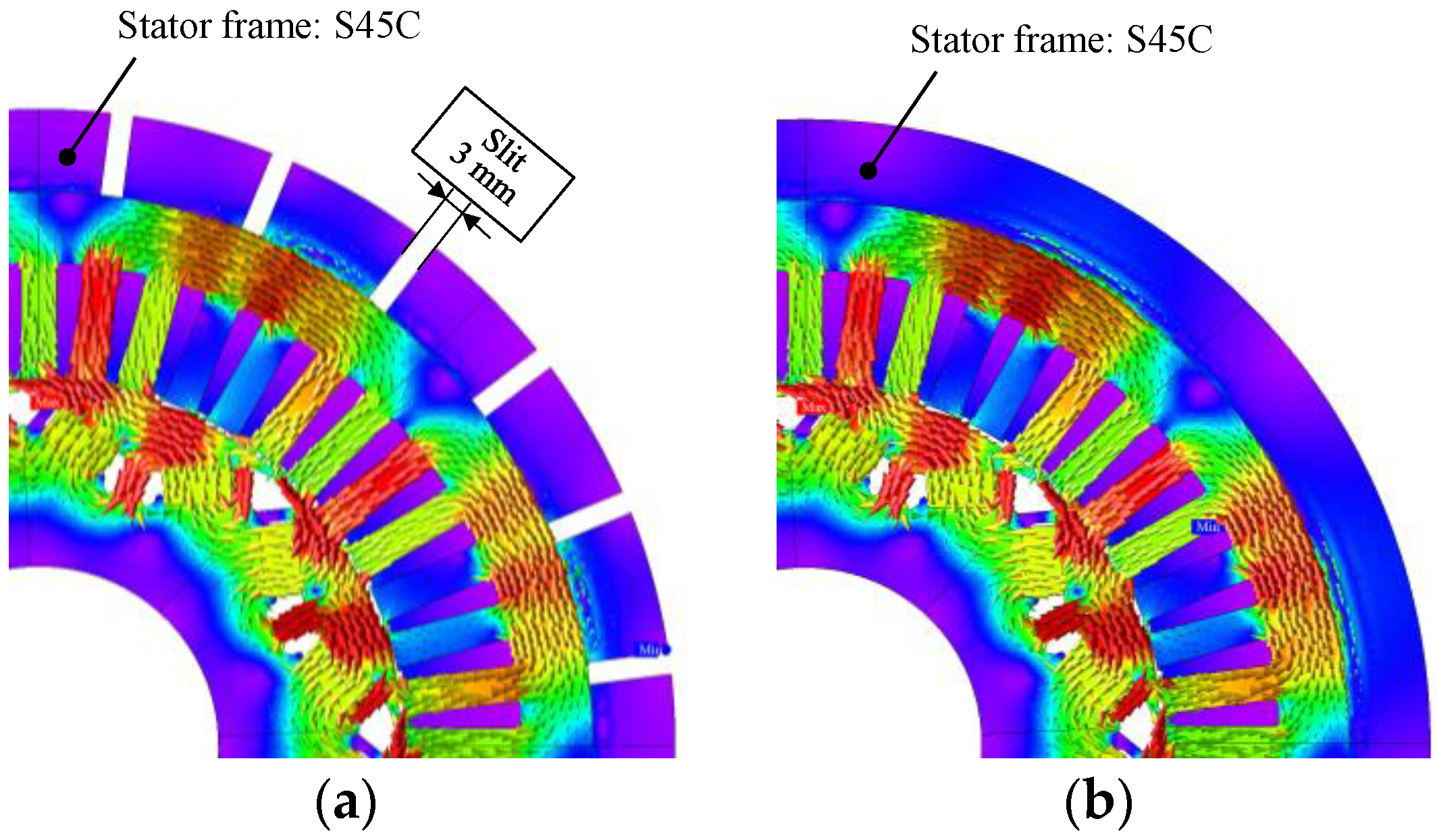
Figure 8 shows the rotor and the stator of the prototype motor. The rotor cores were skewed at an angle of 3.75 deg, taking advantage of the construction whereby the rotor is split into two parts. Thereby, 12th order space harmonics could be reduced because the angle between the teeth and the slots of the stator core was 3.75 deg. The gap between the stator core and the stator frame was minimized by inserting the stator core in the stator frame by shrink-fitting. Besides, slits were provided to the stator frame to suppress the iron loss.
Figure 9 shows a magnetic flux density vector plot when a
q-axis current of 80 A was supplied. However, the rotating speed was 1000 r/min. The model shown in
Figure 9a had slits and the model shown in
Figure 9b did not. As illustrated in
Figure 9, by providing the slits, the armature flux passing in a circumferential direction could be reduced.
Figure 10 shows an eddy current loss of the stator frames of the two models. The eddy current loss of the model with slits was 40.4% lower than that of the model without slits. It can be seen, from this result, that the slits were helpful in terms of iron loss.
4. Drive System of Prototype Motor
From Equation (1), it can be seen that the magnetic field of the proposed motor depends on the absolute value of the im. Therefore, this paper examines magnetic field control methods by supplying the DC im.
The DC
im was controlled with the DC power supply ZX-800L, Takasago Ltd. and the armature currents were supplied by the three-phase inverter MWINV-5R022, Myway Plus Corporation. The electrical conditions and the control block diagram are shown in
Table 6 and
Figure 22, respectively. As shown in
Table 6, the dead time was 4 μs and the error voltage of the dead time was compensated based on the reference [
18,
19]. In addition, as shown in
Figure 22, the relationship between the
Ψa and
im expressed in Equation (1) was used for the decoupling item.
Figure 23 shows the experimental results at the rotating speed of 1000 r/min when an
im of 0 A or 6 A, an
id of 0 A and an
iq of 20 A were given to the prototype motor. It can be confirmed from the waveforms of the three-phase line currents and
im that the line currents could be controlled regardless of the
im.
Table 7 shows the output torque
Tave when a DC
im of 0 A
dc or 6 A
dc was given to the modulation winding. As shown in
Table 7, the output torque increased from 1.49 Nm to 2.40 Nm by supplying a DC
im of 0 A
dc or 6 A
dc. This result reveals that the prototype motor could control the
Ψa by the DC
im because the
Tave increased with the DC
im under the same armature current condition.
In this section, based on the relationship between the
Ψa and the
im, the drive system for the prototype motor is examined. The above results show that the drive system shown in
Figure 22 could control the line currents independently of the DC
im.
Moreover, Equation (1) means that the square wave
im can be used to output the constant
Ψa because the absolute value of the square wave is constant. The ability to control the
Ψa with the square wave
im is one of the unique points of the proposed adjustable field method. In other words, the power electronics for the proposed motor have a lot of flexibility. The proposed motor can be driven by different power electronics, optimized for magnetic field adjustment by taking advantage of the flexibility. Therefore, we will study the suitable drive system for the proposed motor in the near future. When the power electronics circuit is optimally designed for the field adjustment, the number of switching devices and the complexity of the circuit must be deeply considered because they easily deteriorate the total efficiency [
20].
6. Conclusions
In this paper, the essential operating characteristics of the IPMSM with the proposed adjustable field method utilizing magnetic saturation were examined by conducting the measurement test of the back e.m.f. and the actual load tests.
As a result of the back e.m.f. measurement test, it was confirmed that 51.7% of the Ψa of the prototype motor was controllable. Based on the test results, the magnetic field control performance was compared with the field weakening control and other adjustable field methods under the same amount of the magnetic field control. The proposed method has some advantages, such as a broader controllable range of magnetic field, less copper loss and anti-demagnetization capability. Detailed contributions of the proposed motor are as follows:
Controllable range of the proposed motor magnetic field was 103% larger than that of the variable leakage flux motor, as shown in
Table 5;
Copper loss enhancement of the proposed method was up to 66.9% compared to the conventional field weakening control, as shown in
Table 5;
The proposed motor had a higher anti-demagnetization capability than the hybrid motor by 6.5%, as shown in
Figure 20 and
Figure 21.
In addition, the losses of the proposed motor at two operating points, which are the low-speed high-torque point and the high-speed low-torque point, were compared with that of the benchmarks. As a result, it was seen that the copper loss of the proposed motor was the largest among the compared motors at the low-speed high-torque operating point. On the other hand, the efficiency considering the copper loss and the iron loss of the proposed motor was the highest at the high-speed low-torque operating point.
In the actual load test, the I–T characteristic and the N–T characteristic were measured. It was confirmed through the I–T characteristic measurement test that the torque constant of the prototype motor could be varied continuously according to the Fm. Besides, from the measurement test of the N–T characteristic, it can be seen that the prototype motor could change the operating characteristics, which are the low-speed high-torque and the high-speed low-torque, depending on the Fm. However, the actual load test considering the reluctance torque was not conducted. In the adjustable field PMSM, the conventional vector controls, such as maximum torque per ampere (MTPA) control, maximum torque per voltage (MTPV) control and field weakening control, considered under the constant Ψa condition, had to be extended because the Ψa was adjustable. Therefore, the derivation of the extended vector control algorithm for the adjustable field PMSM is an essential topic for future work.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}