
High-Performance Fractional Order PIMR-Type Repetitive Control for a Grid-Tied Inverter


Abstract
:1. Introduction
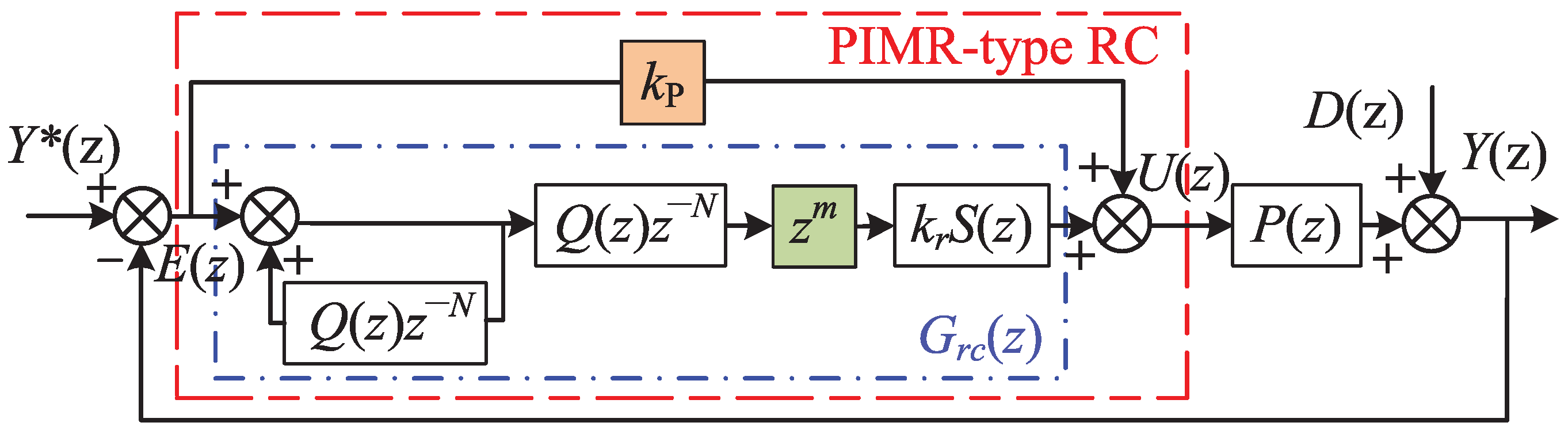
2. Linear Phase Lead Compensation PIMR-Type RC
2.1. PIMR-Type RC
2.2. Analysis of Harmonic Suppression Performance of PIMR-Type RC
3. Design of Fractional-Order Linear Phase Lead Compensation PIMR-Type RC
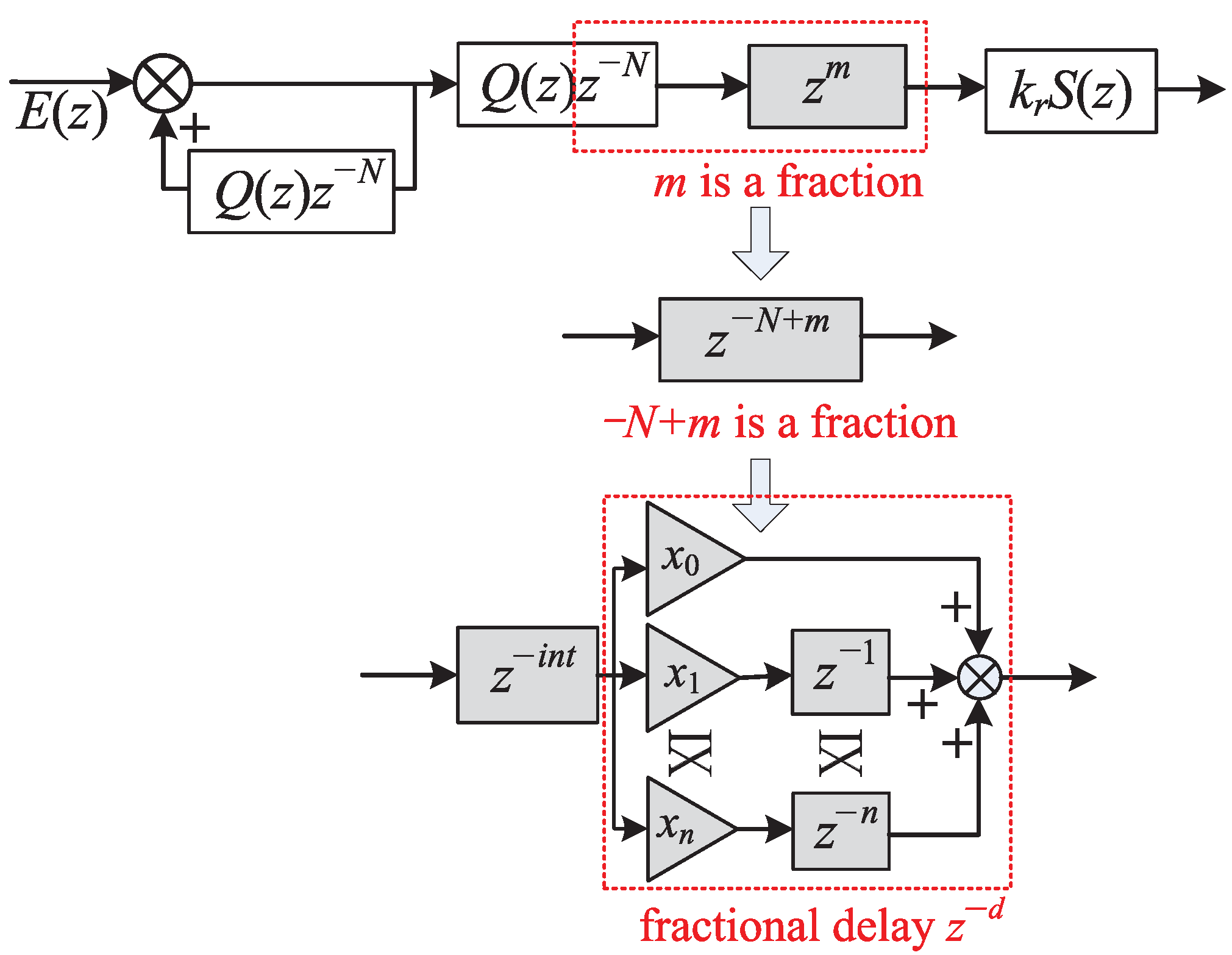
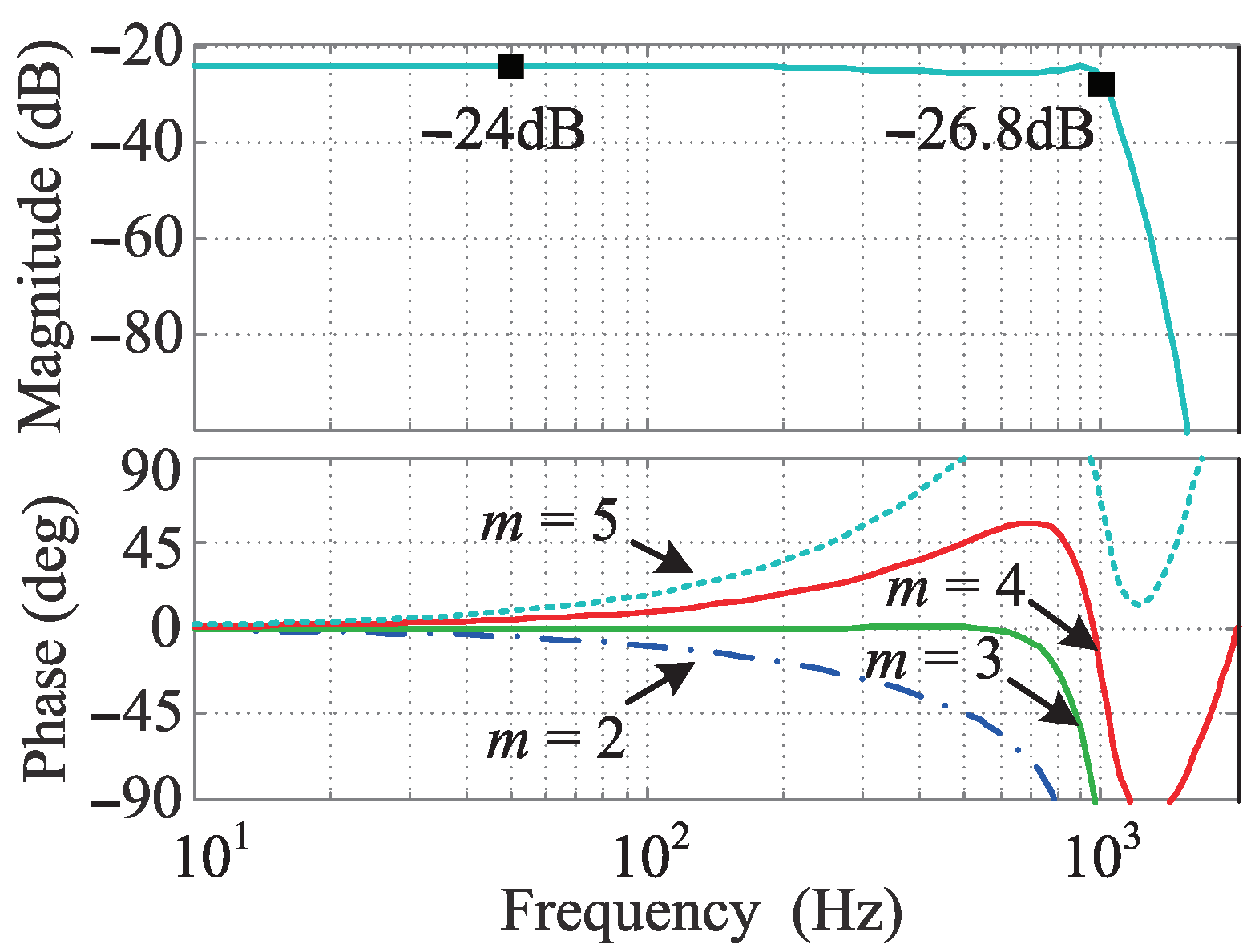
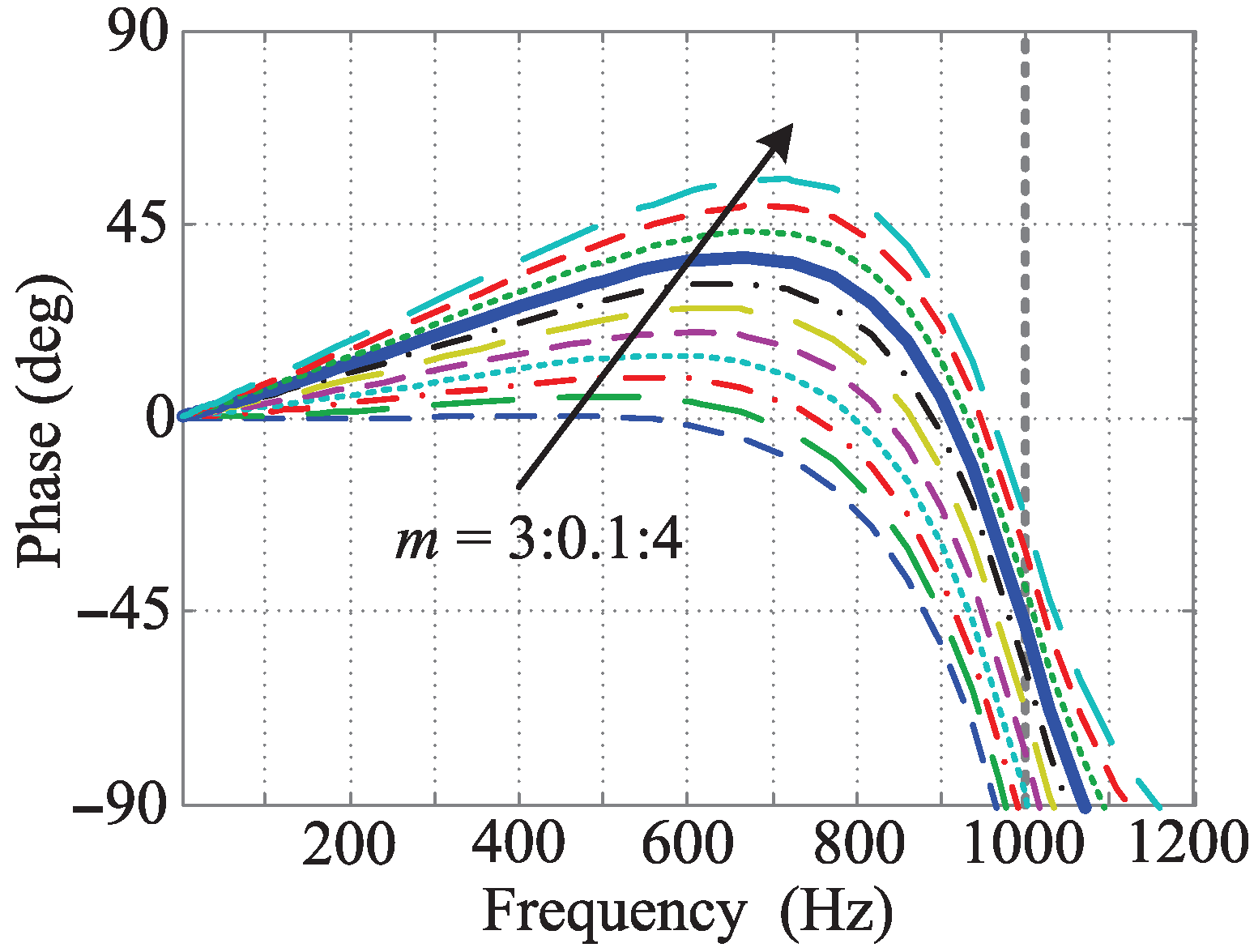
3.1. Fractional-Order Linear Phase Lead Compensation (FOPL) and Implementation
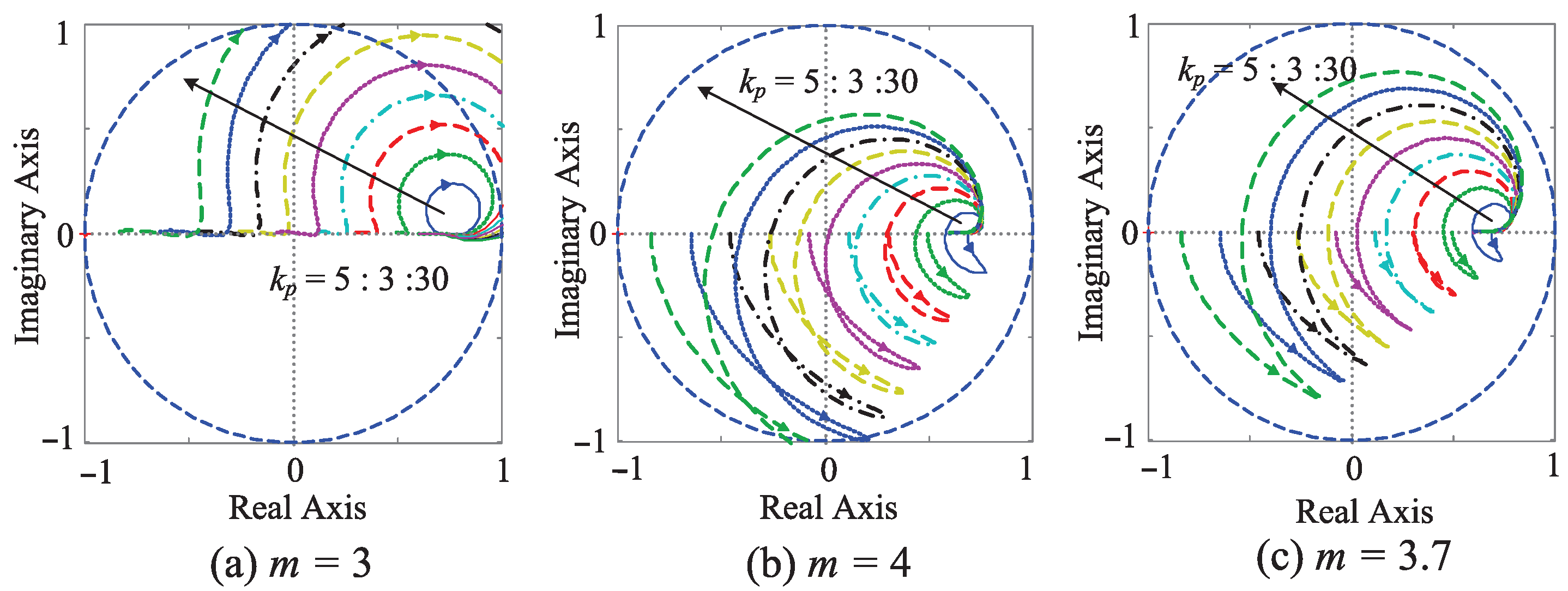
3.2. Stability of PIMR-RC with FOPL
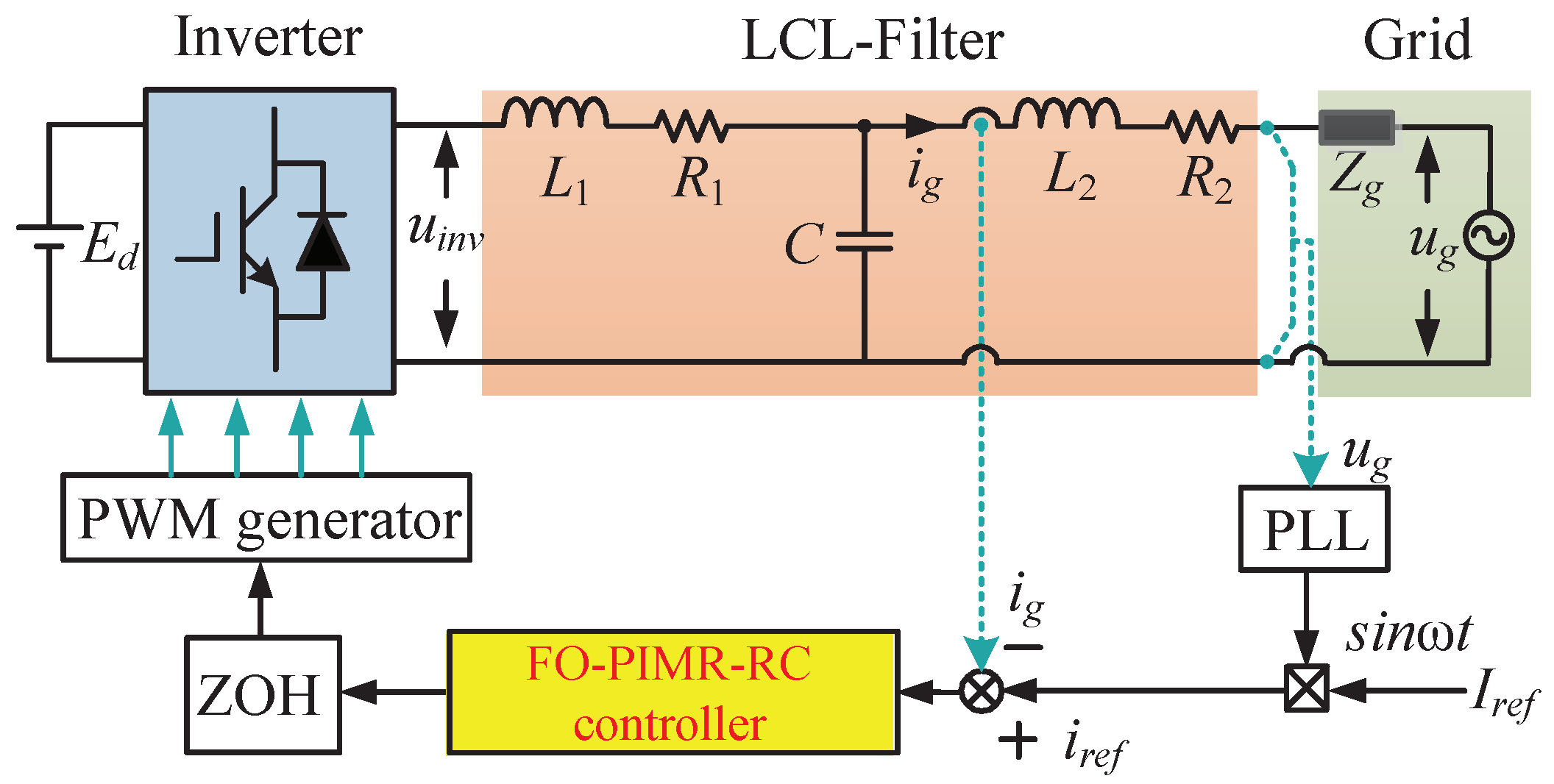
4. FO-PIMR-RC Design for a LCL-Type Grid-Tied Inverter
4.1. Inverter Modeling
4.2. Design of the FO-PIMR-RC
4.2.1. Proportional Gain
4.2.2. Internal Mode Filter
4.2.3. Low-Pass Filter
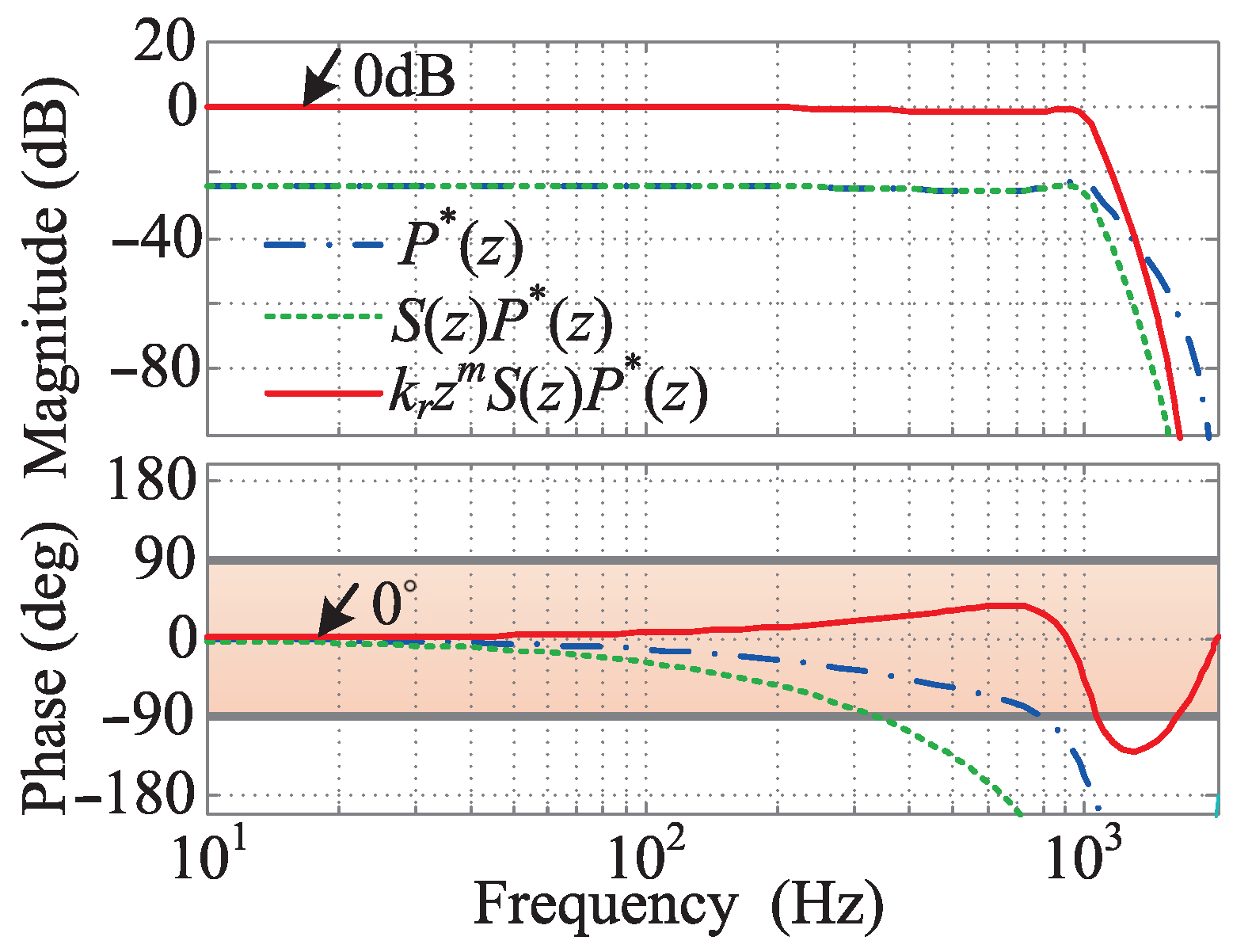
4.2.4. RC Gain and Phase Lead Compensator
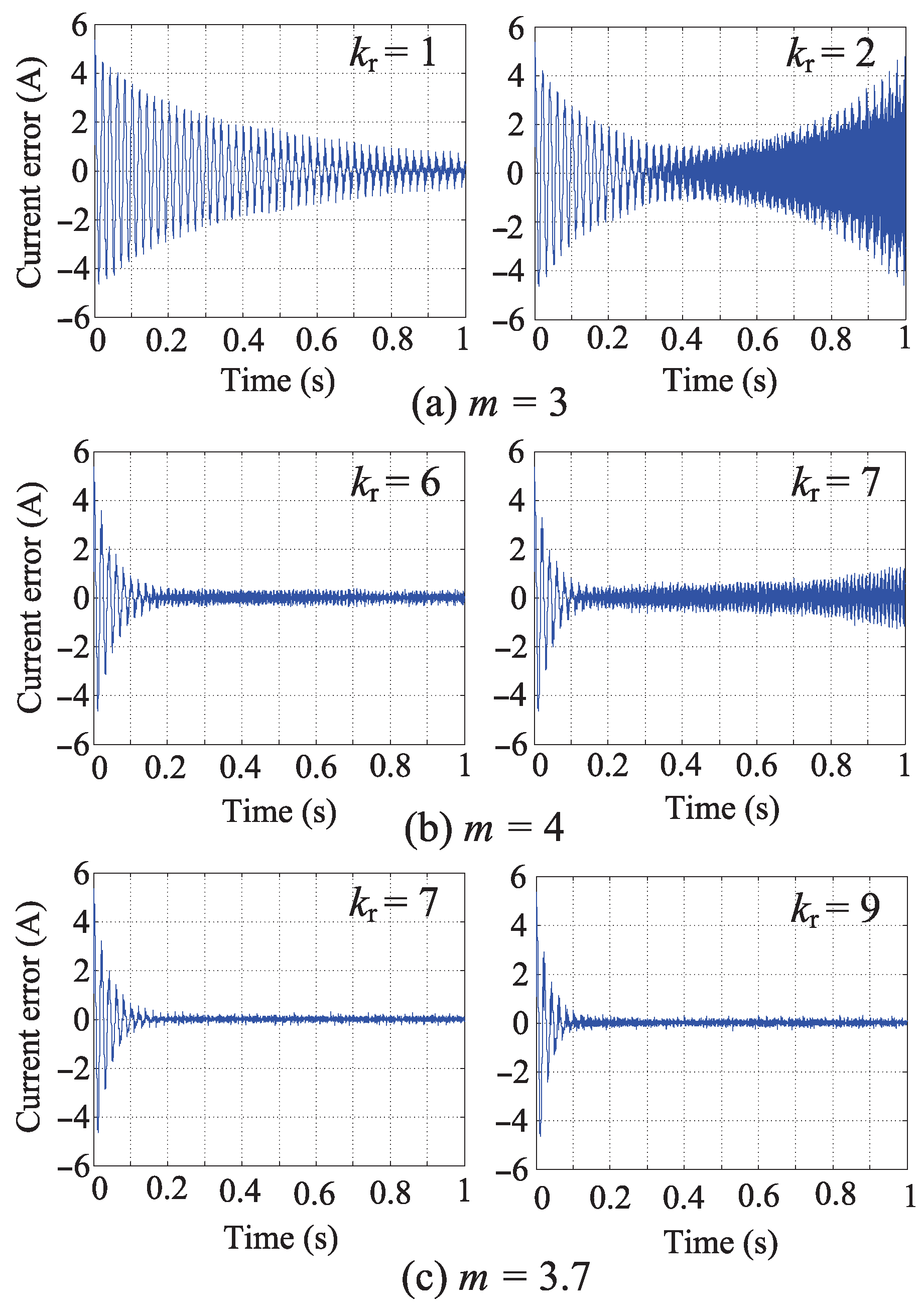
4.2.5. Parameter Optimization
5. Simulation Results
5.1. Steady-State Performance
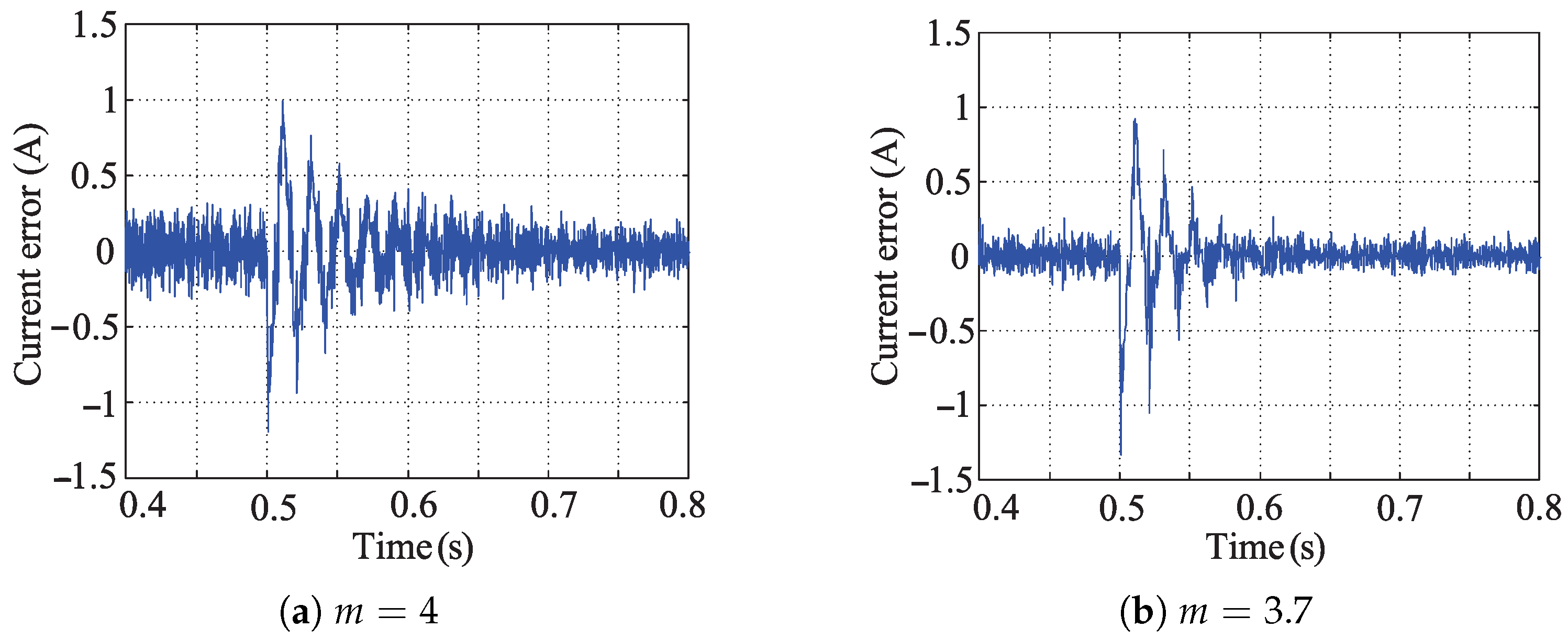
5.2. Dynamic Performance
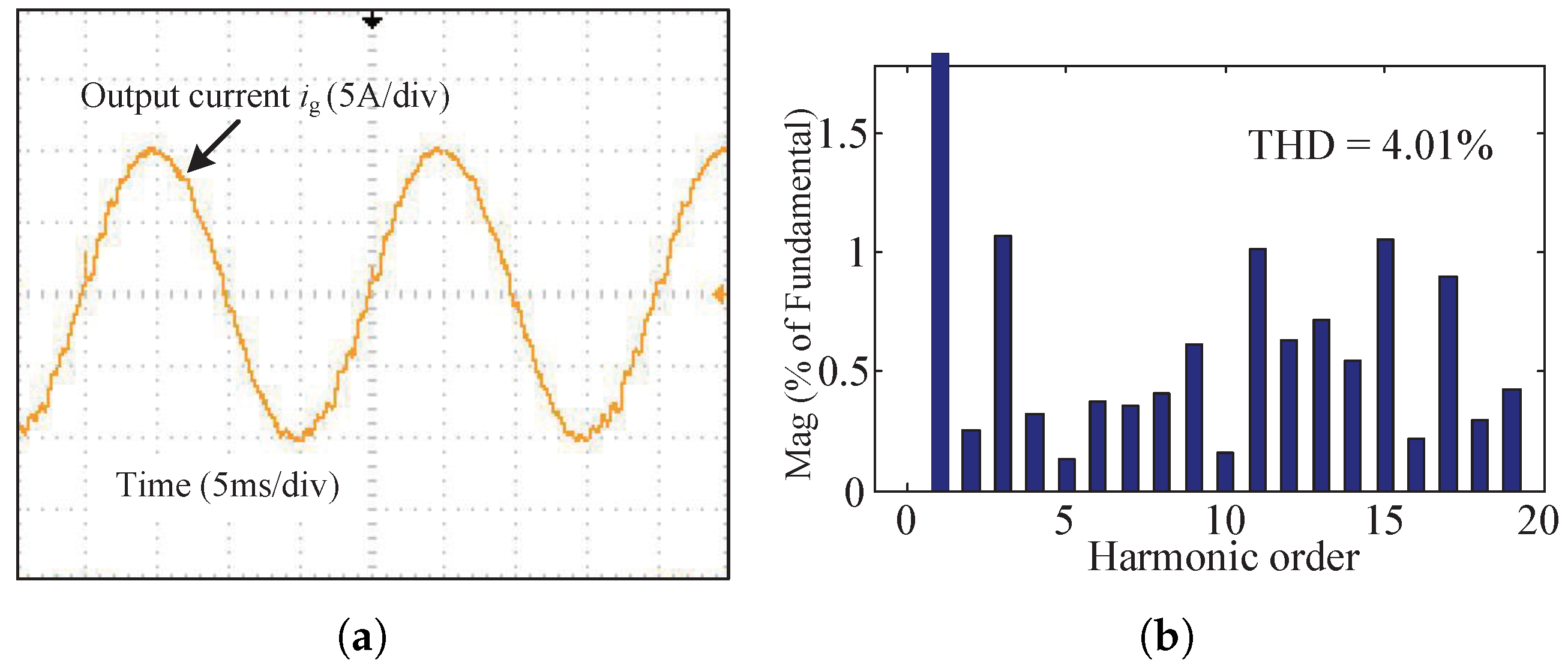
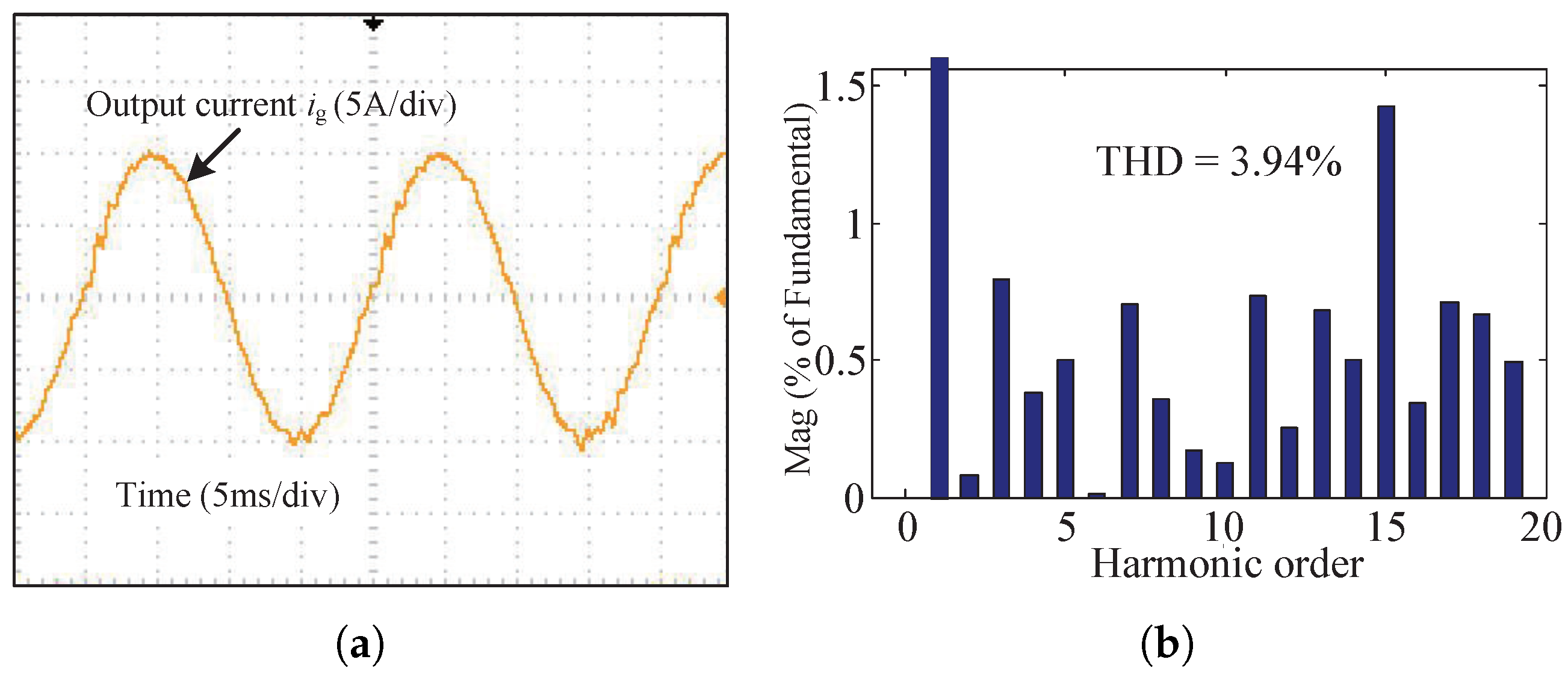
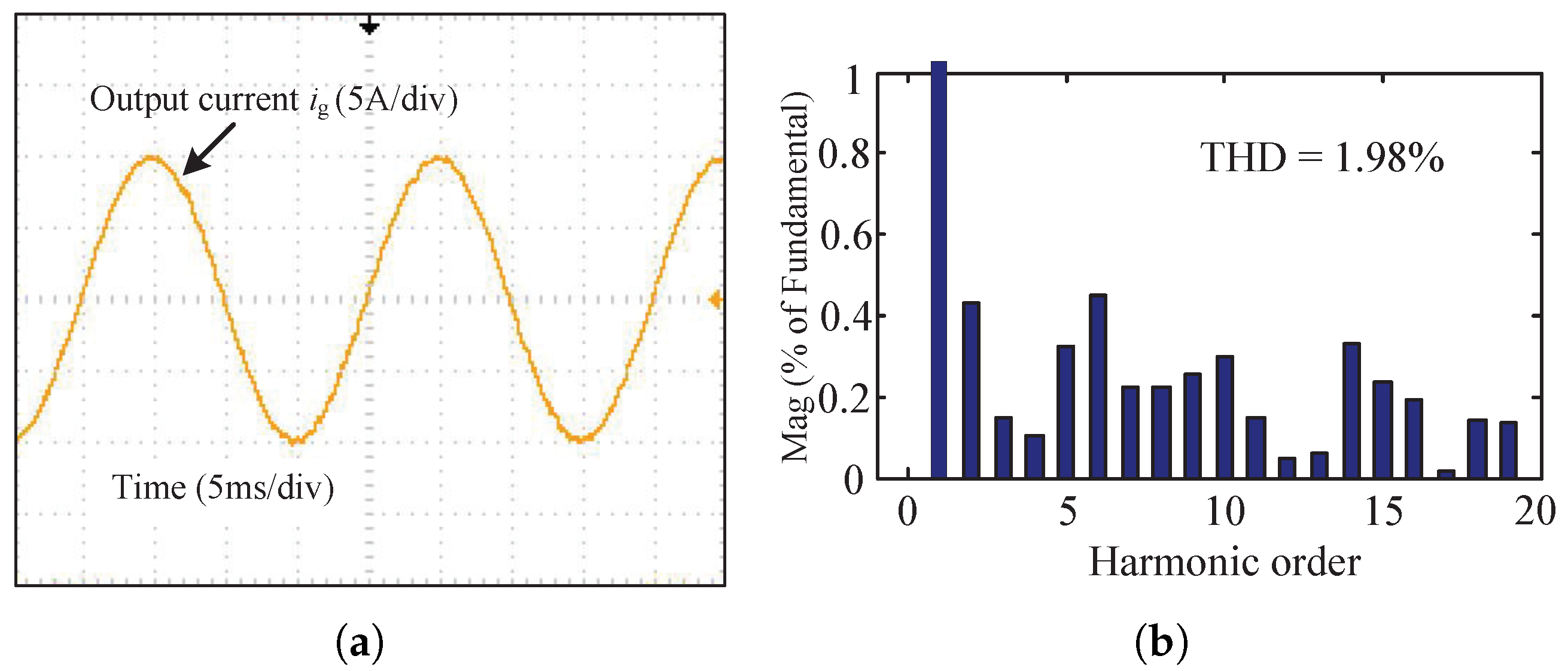
6. Experiment Results
7. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Heydari-doostabad, H.; Monfared, M. An integrated interleaved dual-mode time-sharing inverter for single-phase grid-tied applications. IEEE Trans. Ind. Electron. 2018, 66, 286–296. [Google Scholar] [CrossRef]
- Chen, T.; Lee, C.; Hui, S.Y.R. A General Design Procedure for Multi-Parallel Modular Grid-Tied Inverters System to Prevent Common and Interactive Instability. IEEE Trans. Power Electron. 2019, 34, 6025–6030. [Google Scholar] [CrossRef]
- Pan, D.; Ruan, X.; Wang, X. Direct Realization of Digital Differentiators in Discrete Domain for Active Damping of LCL-Type Grid-Connected Inverter. IEEE Trans. Power Electron. 2018, 33, 8461–8473. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Zhou, K.; Wang, H.; Blaabjerg, F.; Wang, D.; Zhang, B. Frequency Adaptive Selective Harmonic Control for Grid-Connected Inverters. IEEE Trans. Power Electron. 2015, 30, 3912–3924. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.L.; Lin, J.S. One-Dimensional Optimization for Proportional-Resonant Controller Design Against the Change in Source Impedance and Solar Irradiation in PV Systems. IEEE Trans. Ind. Electron. 2014, 61, 1845–1854. [Google Scholar] [CrossRef]
- Ren, L.; Wang, F.; Shi, Y.; Gao, L. Coupling Effect Analysis and Design Principle of Repetitive Control Based Hybrid Controller for SVG With Enhanced Harmonic Current Mitigation. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 4, 1. [Google Scholar] [CrossRef]
- Pereira, L.F.A.; Flores, J.V.; Bonan, G.; Coutinho, D.F.; da Silva, J.M.G. Multiple Resonant Controllers for Uninterruptible Power Supplies-A Systematic Robust Control Design Approach. IEEE Trans. Ind. Electron. 2013, 61, 1528–1538. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, K.; Blaabjerg, F. Enhancing the Frequency Adaptability of Periodic Current Controllers With a Fixed Sampling Rate for Grid-Connected Power Converters. IEEE Trans. Power Electron. 2016, 31, 7273–7285. [Google Scholar] [CrossRef] [Green Version]
- de Almeida, P.M.; Duarte, J.L.; Ribeiro, P.F.; Barbosa, P.G. Repetitive controller for improving grid-connected photovoltaic systems. IET Power Electron. 2014, 7, 1466–1474. [Google Scholar] [CrossRef] [Green Version]
- Shen, G.; Zhu, X.; Zhang, J.; Xu, D. A New Feedback Method for PR Current Control of LCL-Filter-Based Grid-Connected Inverter. IEEE Trans. Ind. Electron. 2010, 57, 2033–2041. [Google Scholar] [CrossRef]
- Vidal, A.; Freijedo, F.D.; Yepes, A.G.; Fernandez-Comesana, P.; Malvar, J.; López, Ó.; Doval-Gandoy, J. Assessment and Optimization of the Transient Response of Proportional-Resonant Current Controllers for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2013, 60, 1367–1383. [Google Scholar] [CrossRef]
- Liserre, M.; Teodorescu, R.; Blaabjerg, F. Multiple harmonics control for three-phase grid converter systems with the use of PI-RES current controller in a rotating frame. IEEE Trans. Power Electron. 2006, 21, 836–841. [Google Scholar] [CrossRef]
- Li, S.; Wang, X.; Yao, Z.; Li, T.; Peng, Z. Circulating Current Suppressing Strategy for MMC-HVDC Based on Nonideal Proportional Resonant Controllers Under Unbalanced Grid Conditions. IEEE Trans. Power Electron. 2015, 30, 387–397. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, J.; Qian, Z. An Improved Repetitive Control Scheme for Grid-Connected Inverter With Frequency-Adaptive Capability. IEEE Trans. Ind. Electron. 2013, 60, 814–823. [Google Scholar] [CrossRef]
- Cho, Y.; Lai, J.S. Digital Plug-In Repetitive Controller for Single-Phase Bridgeless PFC Converters. IEEE Trans. Power Electron. 2013, 28, 165–175. [Google Scholar] [CrossRef]
- Zhao, Q.; Ye, Y. A PIMR-Type Repetitive Control for a Grid-Tied Inverter: Structure, Analysis, and Design. IEEE Trans. Power Electron. 2018, 33, 2730–2739. [Google Scholar] [CrossRef]
- Ye, Y.; Zhou, K.; Zhang, B.; Wang, D.; Wang, J. High-Performance Repetitive Control of PWM DC-AC Converters With Real-Time Phase-Lead FIR Filter. IEEE Trans. Circuits Syst. II Express Briefs 2006, 53, 768–772. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Wang, D.; Zhou, K.; Wang, Y. Linear Phase Lead Compensation Repetitive Control of a CVCF PWM Inverter. IEEE Trans. Ind. Electron. 2008, 55, 1595–1602. [Google Scholar] [CrossRef]
- Zhang, K.; Kang, Y.; Xiong, J.; Chen, J. Direct repetitive control of SPWM inverter for UPS purpose. IEEE Trans. Power Electron. 2003, 18, 784–792. [Google Scholar] [CrossRef]
- Han, B.; Lee, J.S.; Kim, M. Repetitive Controller With Phase-Lead Compensation for Cuk CCM Inverter. IEEE Trans. Ind. Electron. 2017, 65, 2356–2367. [Google Scholar] [CrossRef]
- Arevalo, S.L.; Zanchetta, P.; Wheeler, P.W.; Trentin, A.; Empringham, L. Control and Implementation of a Matrix-Converter-Based AC Ground Power-Supply Unit for Aircraft Servicing. IEEE Trans. Ind. Electron. 2010, 57, 2076–2084. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Liserre, M.; Ma, K. Power Electronics Converters for Wind Turbine Systems. IEEE Trans. Ind. Appl. 2012, 48, 708–719. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Zhang, B.; Zhou, K. Universal Fractional-Order Design of Linear Phase Lead Compensation Multirate Repetitive Control for PWM Inverters. IEEE Trans. Ind. Electron. 2017, 64, 7132–7140. [Google Scholar] [CrossRef] [Green Version]
- Ye, Y.; Wu, Y.; Xu, G.; Zhang, B. Cyclic Repetitive Control of CVCF PWM DC-AC Converters. IEEE Trans. Ind. Electron. 2017, 64, 9399–9409. [Google Scholar] [CrossRef]
- Zhang, B.; Zhou, K.; Wang, D. Multirate Repetitive Control for PWM DC/AC Converters. IEEE Trans. Ind. Electron. 2014, 61, 2883–2890. [Google Scholar] [CrossRef]
- Zhao, Q.; Ye, Y. Fractional Phase Lead Compensation RC for an Inverter: Analysis, Design, and Verification. IEEE Trans. Ind. Electron. 2017, 64, 3127–3136. [Google Scholar] [CrossRef]
- Dannehl, J.; Wessels, C.; Fuchs, F.W. Limitations of Voltage-Oriented PI Current Control of Grid-Connected PWM Rectifiers With LCL Filters. IEEE Trans. Ind. Electron. 2009, 56, 380–388. [Google Scholar] [CrossRef]
- Ye, Y.; Xu, G.; Wu, Y.; Zhao, Q. Optimized Switching Repetitive Control of CVCF PWM Inverters. IEEE Trans. Power Electron. 2018, 33, 6238–6247. [Google Scholar] [CrossRef]
- Zou, Z.X.; Zhou, K.; Wang, Z.; Cheng, M. Frequency-Adaptive Fractional-Order Repetitive Control of Shunt Active Power Filters. IEEE Trans. Ind. Electron. 2015, 62, 1659–1668. [Google Scholar] [CrossRef]
- Chen, S.; Zhao, Q.; Wang, X.; Wang, D.; Lu, X. Fractional Phase Lead Compensation for PIMR-type Repetitive Control on a Grid-tied Inverter. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 2357–2361. [Google Scholar] [CrossRef]
- Oetken, G. A new approach for the design of digital interpolating filters. IEEE Trans. Acoust. Speech Signal Process. 1979, 27, 637–643. [Google Scholar] [CrossRef]
- Ye, J.; Liu, L.; Xu, J.; Shen, A. Frequency Adaptive Proportional-Repetitive Control for Grid-Connected Inverters. IEEE Trans. Ind. Electron. 2020, 68, 7965–7974. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m | Range of Angle () | |
|---|---|---|
| 3 | ||
| 3.1 | ||
| 3.2 | ||
| 3.3 | ||
| 3.4 | ||
| 3.5 | ||
| 3.6 | ||
| 3.7 | ||
| 3.8 | ||
| 3.9 | ||
| 4 |
| Parameters | Value |
|---|---|
| Inverter side inductance: | 3 mH |
| equivalent resistance: | 0.48 Ω |
| Grid side inductance: | 2.6 mH |
| equivalent resistance: | 0.32 Ω |
| Filter capacitor: C | 10 F |
| DC bus voltage: | 380 V |
| Grid rated frequency: | 50 Hz |
| Sampling frequency: | 4 kHz |
| Switching frequency: | 4 kHz |
| Switch dead time: | 3 s |
| THD (%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| 3.28 | |||||||||
| 2.17 | 1.97 | 1.93 | 1.93 | 1.98 | 2.24 | ||||
| 2.07 | 1.92 | 1.90 | 1.98 | 1.86 | 1.89 | 1.98 | 1.92 | 1.90 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Zhao, Q.; Li, H.; Yue, X.; Wen, S. High-Performance Fractional Order PIMR-Type Repetitive Control for a Grid-Tied Inverter. Energies 2022, 15, 3854. https://doi.org/10.3390/en15113854
Yu J, Zhao Q, Li H, Yue X, Wen S. High-Performance Fractional Order PIMR-Type Repetitive Control for a Grid-Tied Inverter. Energies. 2022; 15(11):3854. https://doi.org/10.3390/en15113854
Chicago/Turabian StyleYu, Jun, Qiangsong Zhao, Hengyi Li, Xuebin Yue, and Shengjun Wen. 2022. "High-Performance Fractional Order PIMR-Type Repetitive Control for a Grid-Tied Inverter" Energies 15, no. 11: 3854. https://doi.org/10.3390/en15113854
APA StyleYu, J., Zhao, Q., Li, H., Yue, X., & Wen, S. (2022). High-Performance Fractional Order PIMR-Type Repetitive Control for a Grid-Tied Inverter. Energies, 15(11), 3854. https://doi.org/10.3390/en15113854