This section initially describes the system composed of the DC motor fed by a three-phase fully controlled rectifier. In the sequence, it exposes the parameters identified for the NARMAX model and its validation with the measured data from the system. It then discusses the tuning of the controllers through the optimization process and the results obtained in the implementation and comparison of the controls: (i) Proportional, integral, and derivative (PID), (ii) Practical Nonlinear Predictive Control (PNMPC), (iii) Fuzzy and (iv) Discrete Sliding Mode Control using input-output model (DSMC).
4.1. System Description
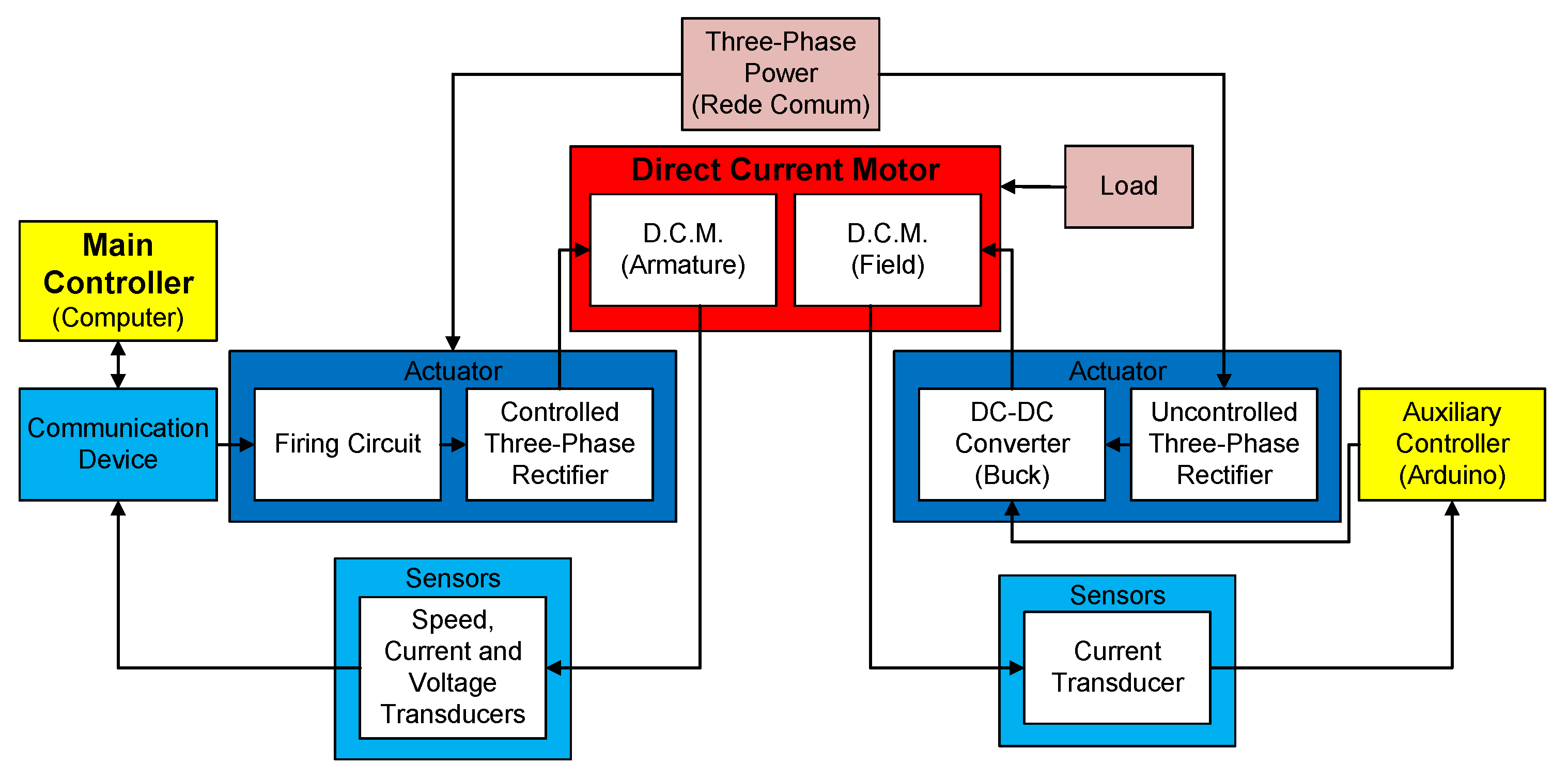
The proposed system is composed of a direct current motor (DC motor) powered by a three-phase fully controlled rectifier (TPFCR).
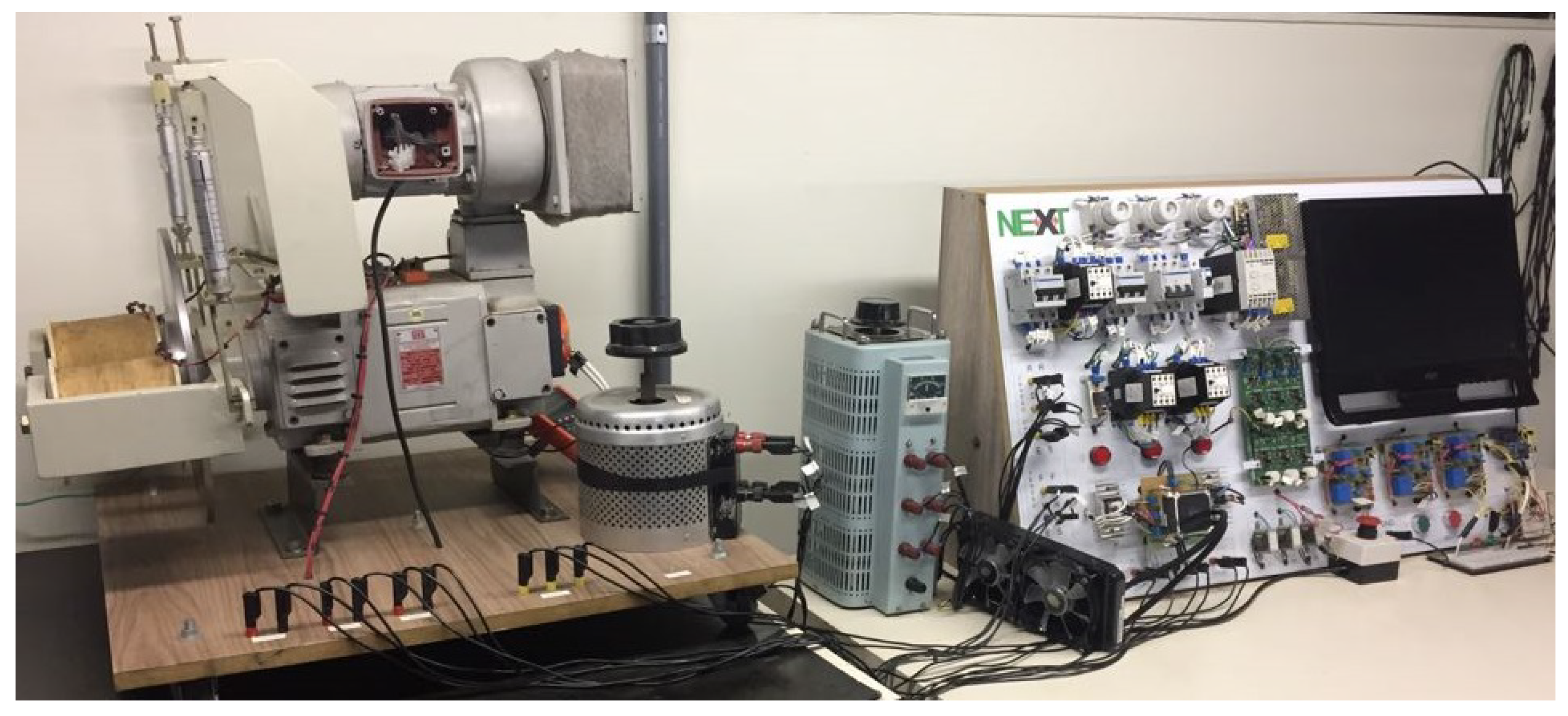
Figure 5 shows the bench with the implemented system, in which the state of the current configuration is the result of the evolution promoted through improvements, substitutions and adjustments made to the bench initially designed and used in the works Dias et al. [
21] and Ganzaroli et al. [
40].
The main element of the system is the DC motor of independent excitation. Its main electrical characteristics indicated in the nameplate data are: (i) power of 1 kW, (ii) nominal armature voltage 220 V, (iii) nominal current in the armature of 5.5 A, (iv) nominal field voltage of 190 V and (v) nominal field current of 1.15 A. The DC motor has elements associated with its structure and installed by the manufacturer, such as forced ventilation system, electromagnetic brake and tachogenerator coupled to the shaft.
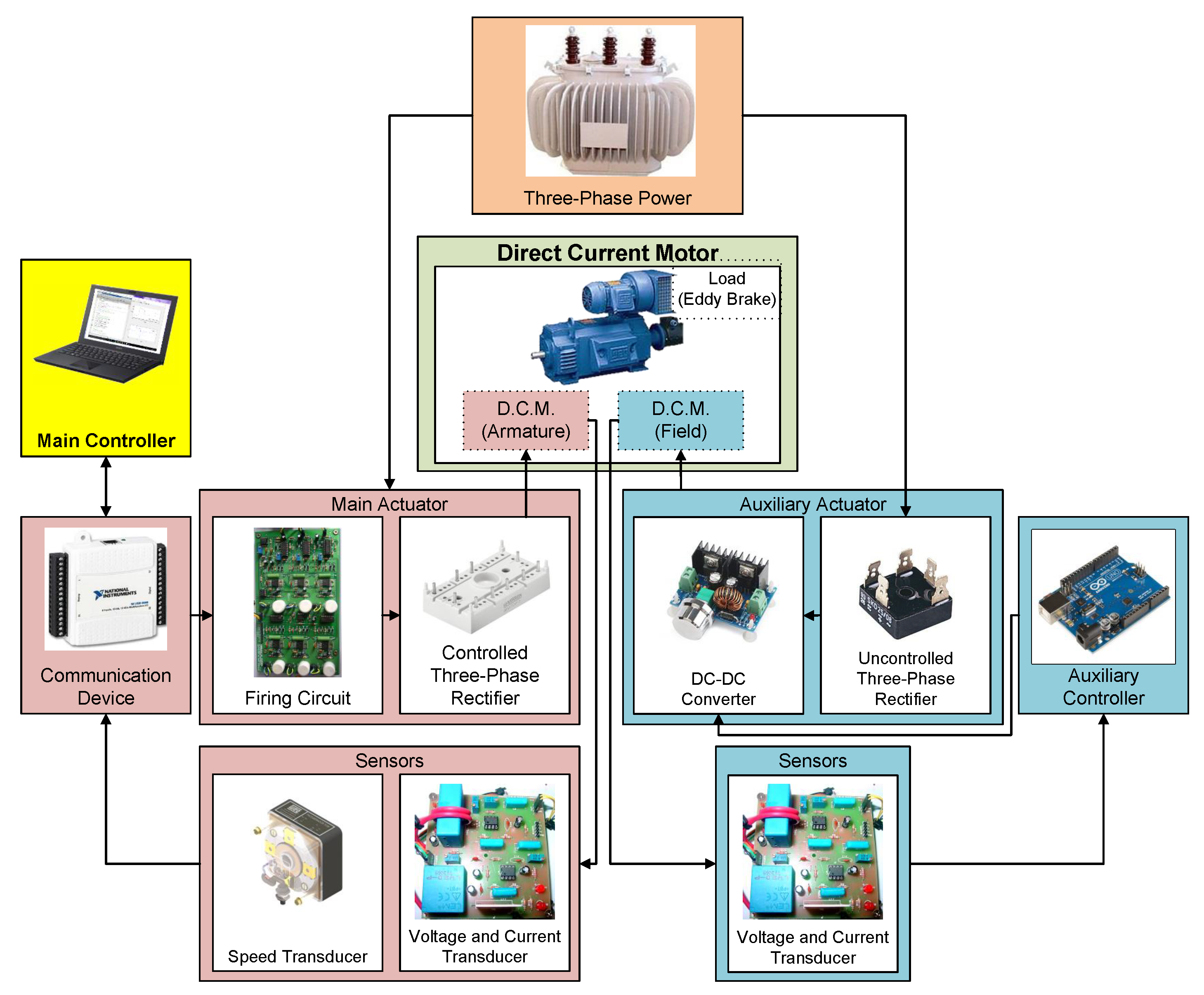
Figure 6 shows the diagram of the association between the system components, trigger circuit, devices for communication, measurement and signal conditioning.
Among the possibilities of choosing the different connection configurations, independent excitation was chosen, in order to obtain a relationship between the armature voltage and the speed developed by the DC motor. The field voltage is provided by the auxiliary control system. The field voltage is provided by the auxiliary control system. In this system, the PID control action is calculated by a routine implemented in the development platform that uses the ATmega328P microcontroller. This platform receives the field current signal from the current sensors, calculates the control action and provides as a result the Pulse-width modulation (PWM) voltage signal and applies it to the Buck DC-DC converter. The Buck converter has, at its output, the average voltage value equal or lower than the input voltage, as the control signal applied to its static switch. For this application, the input voltage is generated by the uncontrolled three-phase SKD25/08 rectifier from the Semikron® manufacturer.
The implementation of the main control action is performed through the armature voltage of the DC motor and is supplied through the fully controlled three-phase rectifier. For this element, the SK70DT16 bridge from the Semikron® manufacturer was used. This bridge operates with voltages up to 1600 V and a current of 70 A. The generation of pulses and the control of the conduction period of the thyristors are performed by the electronic tripping circuit. This circuit is based on the use of three commercial TCA785, being the IC for each pair of thyristors. The operation of the integrated circuit is based on the application of a continuous voltage signal of low magnitude that proportionally promotes the displacement of the position of pulse generation within the range in which the thyristor is able to conduct.
The use of the TCA785 IC makes the logic that relates the control voltage signal from the circuit and the DC motor armature voltage is reversed. This establishes the relationship between the percentage control action, the control voltage signal from the trigger circuit and the DC motor armature voltage : for 0.00% control action, where V represents V; for 100% control action, where V represents V. The speed signal was obtained by the tachogenerator coupled to the DC motor shaft. The voltage × speed ratio was 20 mV/rpm. Considering the possibility of speeds up to 2000 rpm and the specifications of the multifunctional input-output device, the resistive voltage divider was used, converting the value of this ratio to 5 mV/rpm. In addition, the output signal has high frequency noise characteristic of the tachogenerator, requiring the presence of the low-pass filter in order to condition the speed signal and reduce the noise.
The voltage and current signals from the armature circuit, the field circuit and the electromagnetic brake system come from Hall Effect sensors. The sensor used to measure the voltage was LV-25P, with a maximum voltage of 500 V. For the current, the LA-55P was used, which operates with currents of up to 55 A. These elements are associated with signal conditioners represented by the Butterworth filter of second order with active amplifier. The power supply for the electronic circuits was supplied by regulated 5 V and 12 V regulated voltage sources. The interface between the computer and the system was performed by means of the multifunctional input-output device. The USB-6008 from National Instruments
® was used. Among its main features are: (i) bus power supply; (ii) eight analog inputs with acquisition rate up to 10,000 samples/s, resolution up to 12 bits, −10 V to 10 V range with 37.5 mV accuracy; (iii) two analog outputs with an acquisition rate of up to 150 amostras/s, resolution up to 12 bits, 0 V to 5 V range with 7 mV of accuracy and current up to 10 mA; (iv) twelve digital channels configurable as input or output, all with 0 V to 5 V, range, 37.5 mV of accuracy, 5 mV and output current up to 102 mA; and (v) one 32 bit counter channel.
Table 1 and
Table 2 provide a summary of the parameters of the DC motor and the three-phase fully controlled rectifier parameters (TPFCR).
4.2. Optimization Process Applied to the Model
The model used is the result of the identification process performed by the NARMAX method, considering two inputs and three outputs. The process of obtaining the model follows the main steps proposed by [
41]: (i) dynamic testing and data collection, (ii) choice of the mathematical representation, (iii) structure selection, (iv) parameter estimation and (v) validation with the system. The dynamic tests were performed by applying the signal characterized basically by the gradual variation, increasing and decreasing at different levels within the voltage range supported by the DC motor.
The signal configuration was established in order to capture the transient behavior from the variations at different levels, the behavior on the permanent regime allowing the signal to remain long enough to stabilize the system response, as well as the various dynamics such as hysteresis through increasing and decreasing variation considering the same voltage levels and dead time, comparing the instant of transitions in the input signal and the output signal. The sampling period was set at ms, respecting the Nyquist theorem and the processing time required for the calculation and execution of the control action.
The characteristics of the mathematical representation using the NARMAX model are expressed by: (i) sigmoidal regressors, (ii) two inputs, control voltage and shaft load and (iii) three outputs, speed, armature voltage and armature current. Expressions (
21) through (
23) present the optimized parameters for defining the structure of the system model; expressions (
24) through (
30) ) present the optimized system model coefficients for speed outputs; expressions (
31) through (
37) present the optimized system model coefficients for armature voltage outputs; and expressions (
38) through (
44) present the optimized system model coefficients for armature current outputs.
Expressions (
21) through (
44) are values that determine the selection structure and parameters of the NARMAX model, resulting from the heuristic optimization process using genetic algorithm (GA). The implementation of the GA for determining the model parameters was performed considering: (i) initial randomly generated population with 15 individuals, (ii) linear crossover rate
, (iii) linear mutation rate
. The selection method adopted was the tournament involving four individuals,
and the stopping criteria were set at 30 generations,
or until obtaining
. The uniform mutation operator and the crossover operator with a cutoff point were used. The evaluation function used is given by (
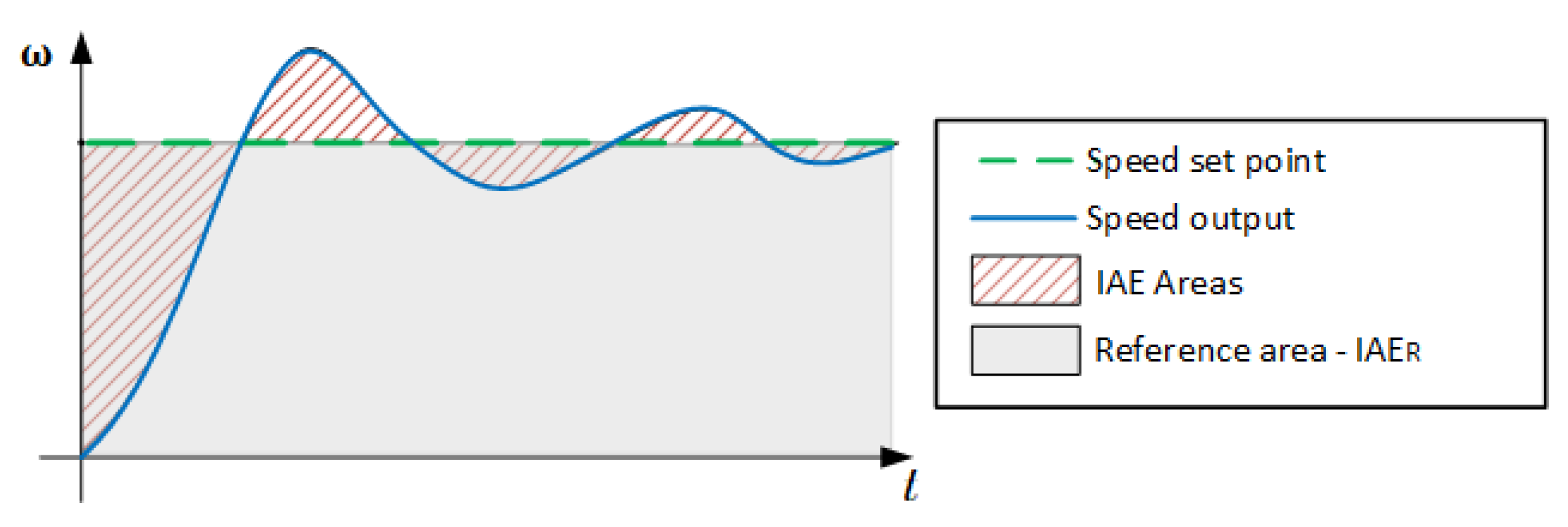
45), which is formed by the motor speed IAE
plus the penalties relative to the nominal armature voltage
V and the peak current In
A.
In the validation stage of the NARMAX model, the result generated by the model was compared with the signals obtained from the real system,
Figure 5, considering the application of the same input signal to the model and for the plant with and without the presence of load. To evaluate the quality of the model, considering the existence of three outputs, different weights were established according to the relevance of each signal to the work. The weights adopted are: (i) 0.70 for approximation of the motor speed signal
, (ii) 0.20 for approximation of the armature voltage signal
and (iii) 0.10 for approximation of the armature current signal
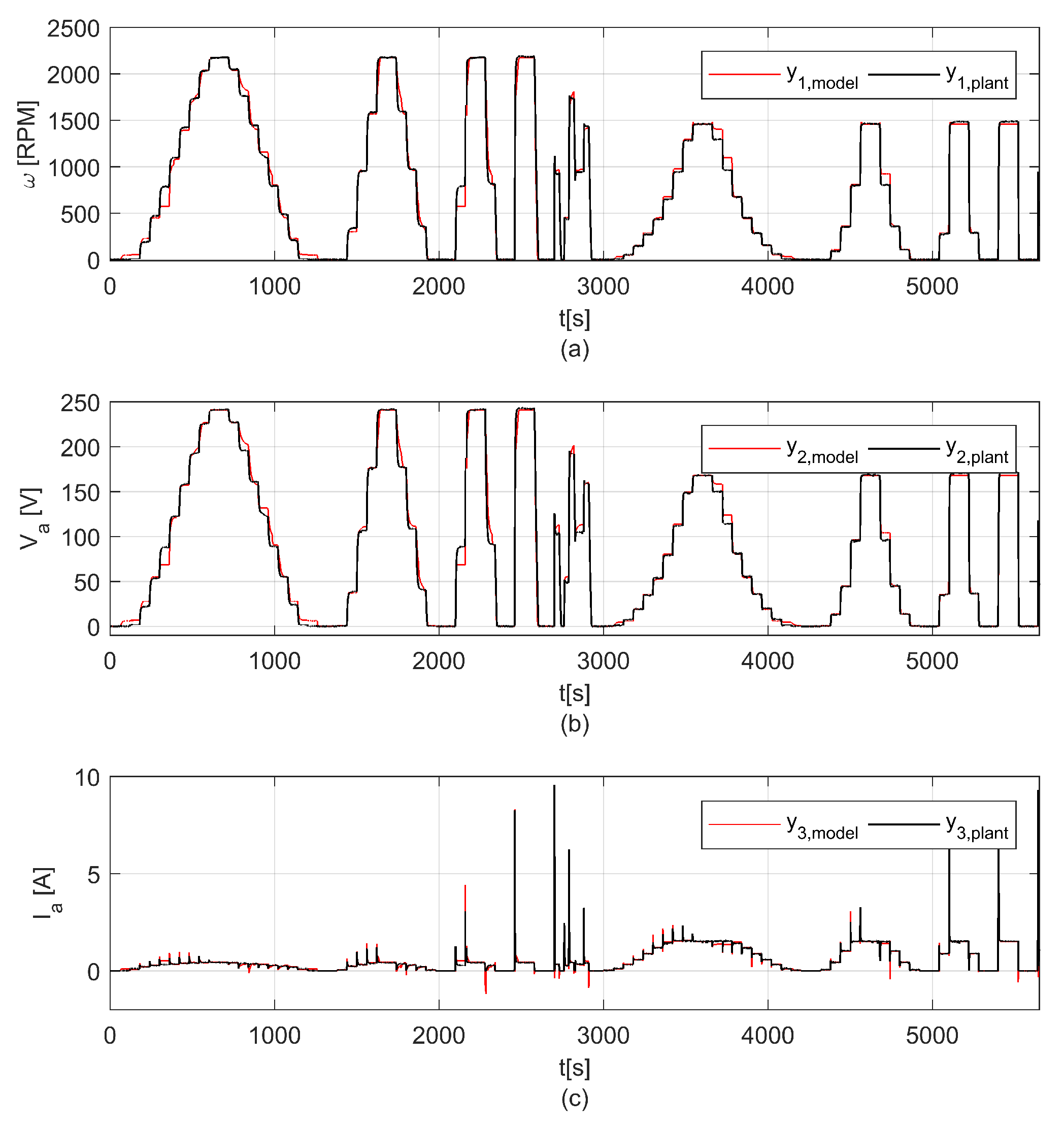
. The output signals of the real × model system are shown in
Figure 7. The individual approximation rate for each output is 91.12% for the speed signal, 91.69% for the armature voltage signal and 86.04% for the armature current signal. After the assignment of the weights, the overall model evaluation criterion rate was 90.16%.
Figure 7 shows the unloaded tests in the range
and the loaded tests in the range
. The implementation of the load is identified in the response of the system through reduced speed levels and increased armature current levels when compared to the test without the presence of the load, despite the reference signal being the same for both tests. This behavior is characteristic of the DC motor operating in open loop, i.e., in the absence of the control system.
4.3. Applying the Optimization Process to Controllers
The tuning of the controllers is performed, as well as the optimization of the model parameters by the heuristic optimization method genetic algorithm (GA). The implementation of the GA for tuning the parameters of all the controllers studied was established based on the considerations: (i) initial randomly generated population with 50 individuals, (ii) linear crossover rate
, (iii) linear mutation rate
. The selection method adopted was the tournament involving five individuals,
and the stopping criteria were set at 250 generations,
or until obtaining
. The Non-Uniform Mutation operator and the Simple Crossover operator were used. The evaluation function used is given by (
45), which is formed by the IAE
of engine speed plus penalties related to the nominal armature voltage
V and the peak current
A.
Heuristic optimization searches for the best solution to the problem within the search space . The definition of is directly related to the speed of convergence of the algorithm and thus, specific limits were established for the parameters of each controller based on a priori knowledge of the system. The proposed simulator used in the optimization process represents different scenarios, due to different setpoints, different dynamics and the insertion or removal of loads. This simulator allows the optimization to be performed considering the main characteristics and dynamics of the system. In this way, the optimized parameters of the various controllers, take into account the different dynamics for the different operating points.
4.3.1. Tuning of the PID Controller
The tuning of the PID controller sought to optimize the parameters in the sets referring to the search space
of each constant: (i) proportional constant
, (ii) integral constant
and (iii) derivative constant
.
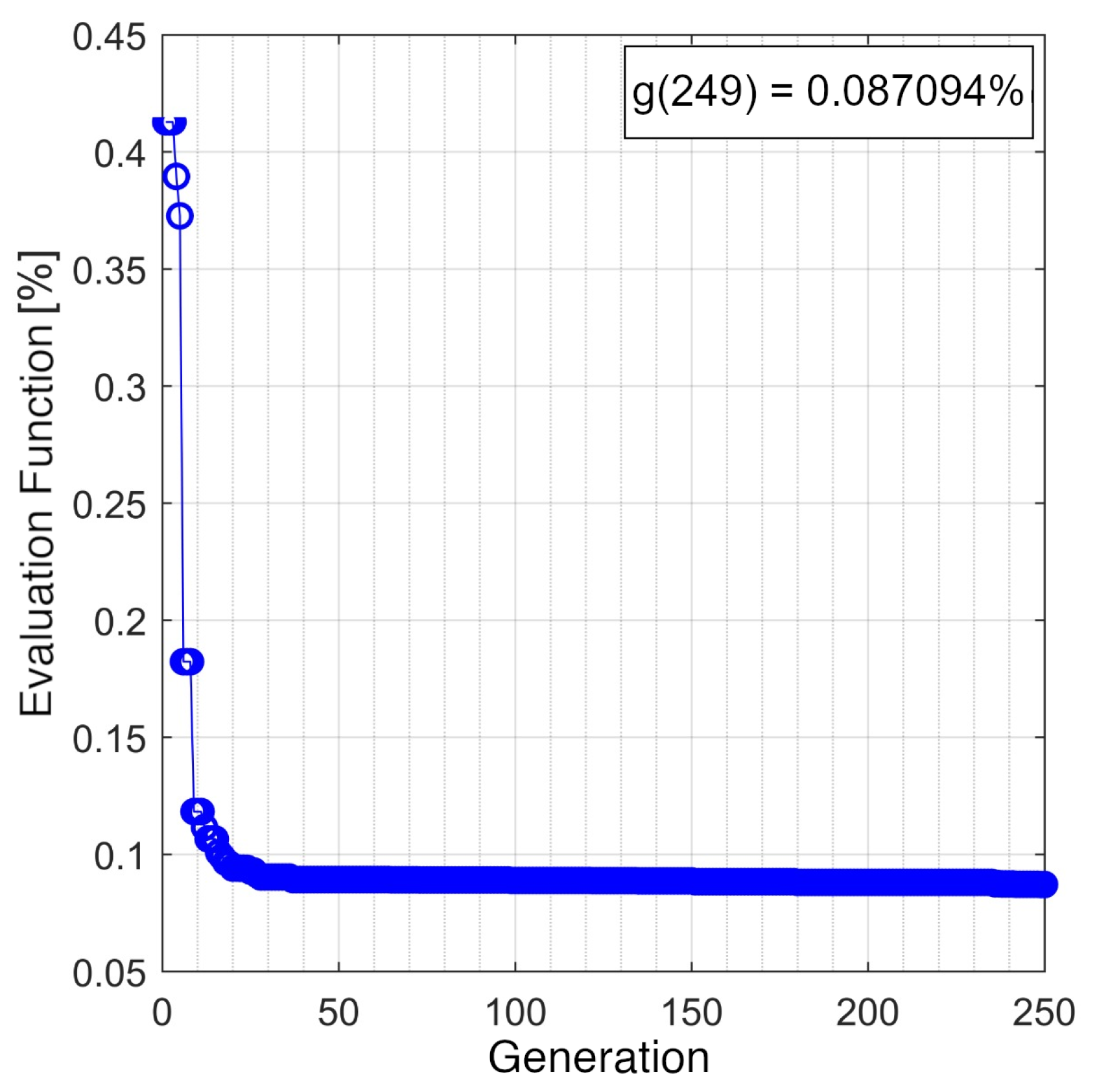
Table 3 provides the optimized values for the tuning parameters of the PID controller and
Figure 8 presents the performance of the GA over the generations. It can be seen that the best individual was obtained in generation 249 with the value of
.
4.3.2. Tuning of the Practical Nonlinear Predictive Controller
The PNMPC controller was optimized by considering the parameters bounded by their respective search spaces
: (i) prediction horizon:
, (ii) control horizon:
, (iii) damping rate of the reference signal:
, (iv) damping rate of the control action:
, (v) damping rate of nonlinearity of the
matrix:
and (vi) variation for linearization at each sampling instant:
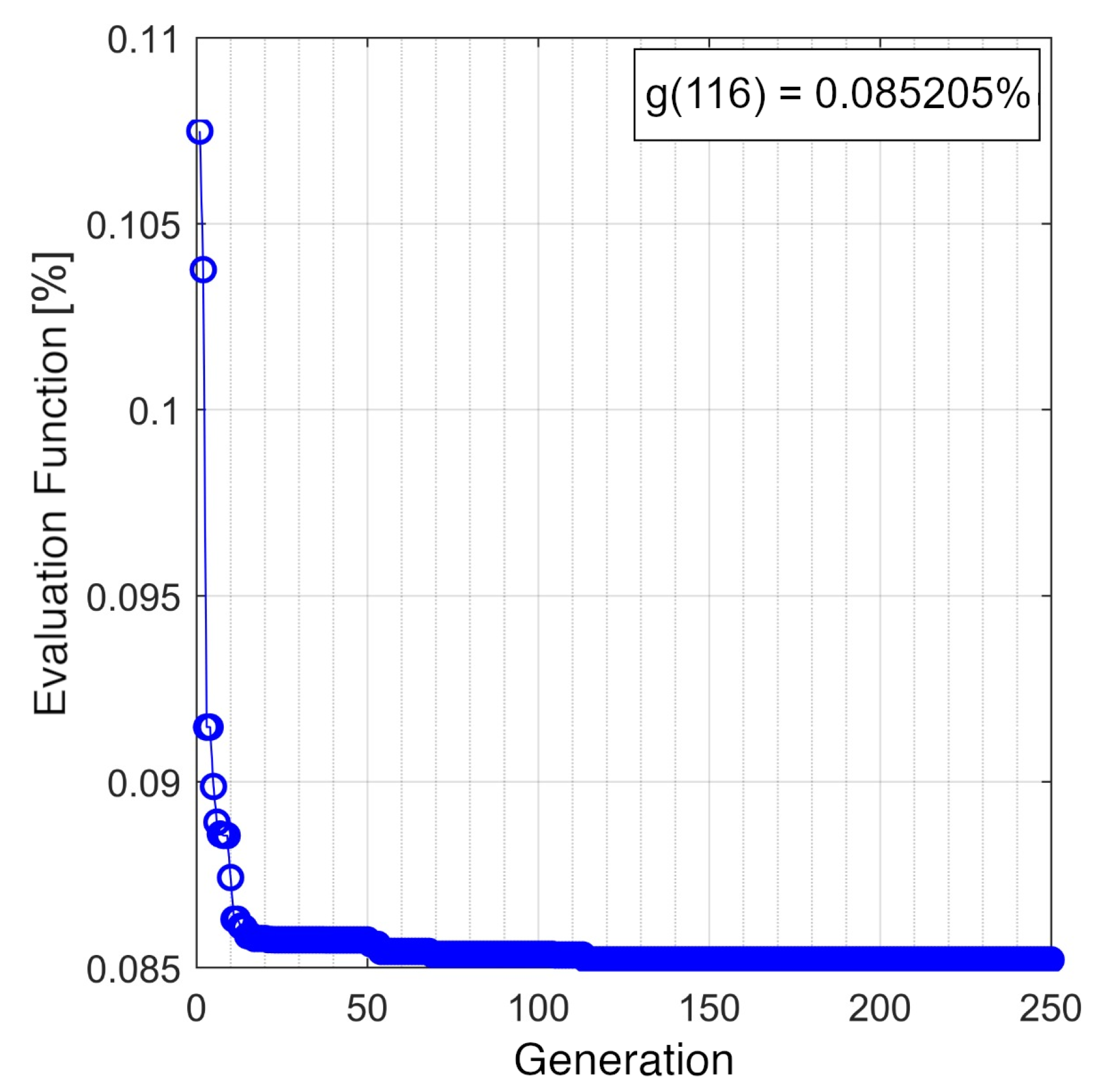
. The optimized parameters of the PNMPC controller are arranged in
Table 4, and
Figure 9 shows the performance of the GA over the generations in the optimization process, in which it is observed that the best individual was obtained in generation 116 with the value of
.
4.3.3. Tuning of the Fuzzy Controller
The optimization of the membership functions of the fuzzy controller resulted in the values of the limits shown in
Table 5. The choice of trapezoidal shape is a consequence of the inability of the controller to meet the requirements of the output signal specification with triangular functions. The membership functions,
to
, represent the degree of truth of the variables Error and Error Variation, considering their universes of discourse.
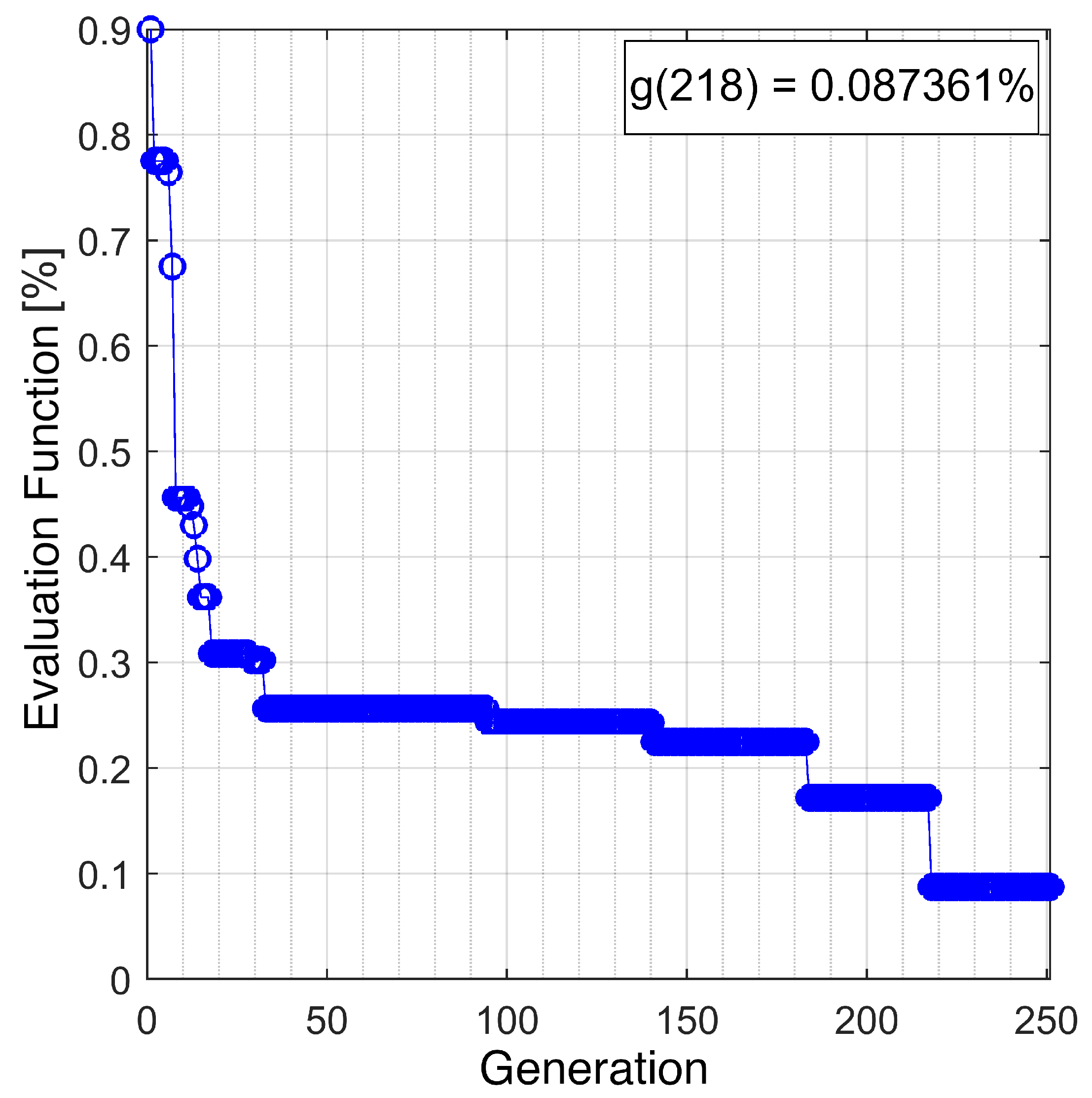
Figure 10 shows the performance of the GA over the generations in the process of fuzzy controller optimization. It can be seen that the best individual was obtained in generation 218 with the value of
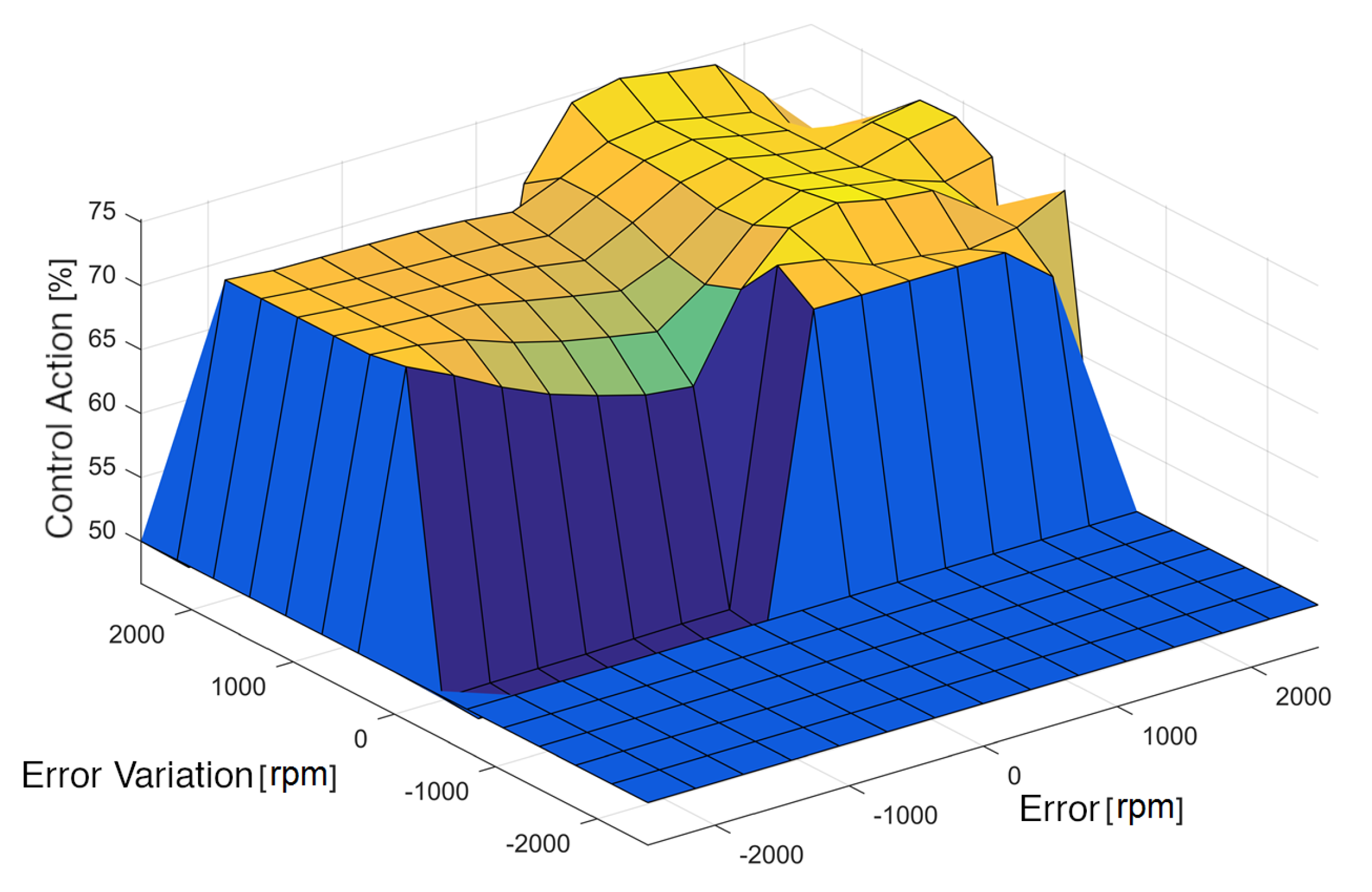
. The fuzzy response surface, shown in
Figure 11, indicates sharp transitions resulting from the irregular shapes obtained for the membership functions.
4.3.4. Tuning of the Discrete Sliding Mode Controller
The DSMC optimization considers the parameters: (i)
B, which is associated with the second order sliding function, (ii)
M, which determines the amplitude of the signal function and (iii)
C, which enforces the dynamic behavior of the output variable. In the optimization, all parameters are bounded by their respective search spaces as:
, in which the values optimized by the GA are arranged in
Table 6.
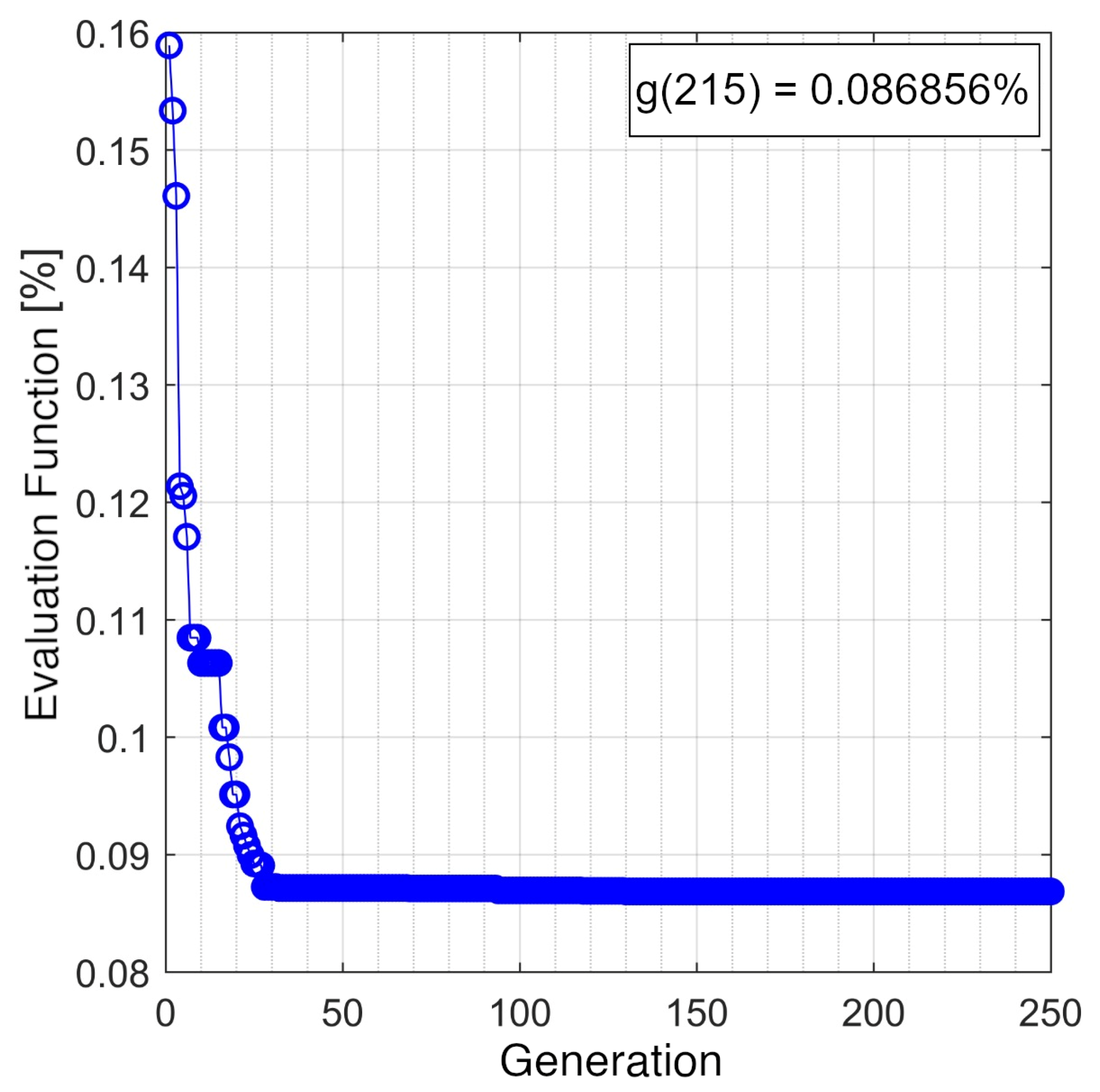
Figure 12 shows the performance of the GA over the generations, in which the best individual was obtained in generation 215 with the value of
.
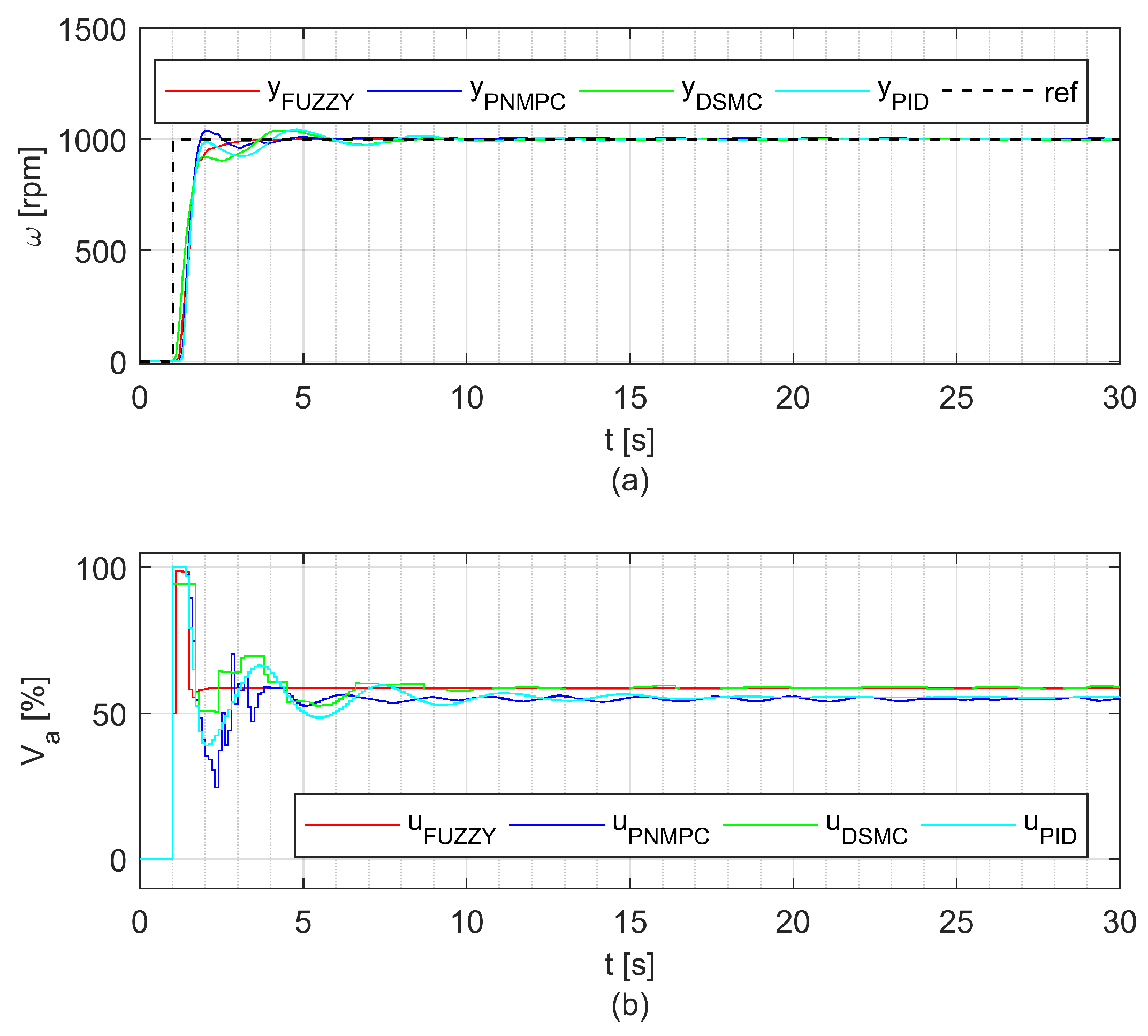
4.5. Discussion
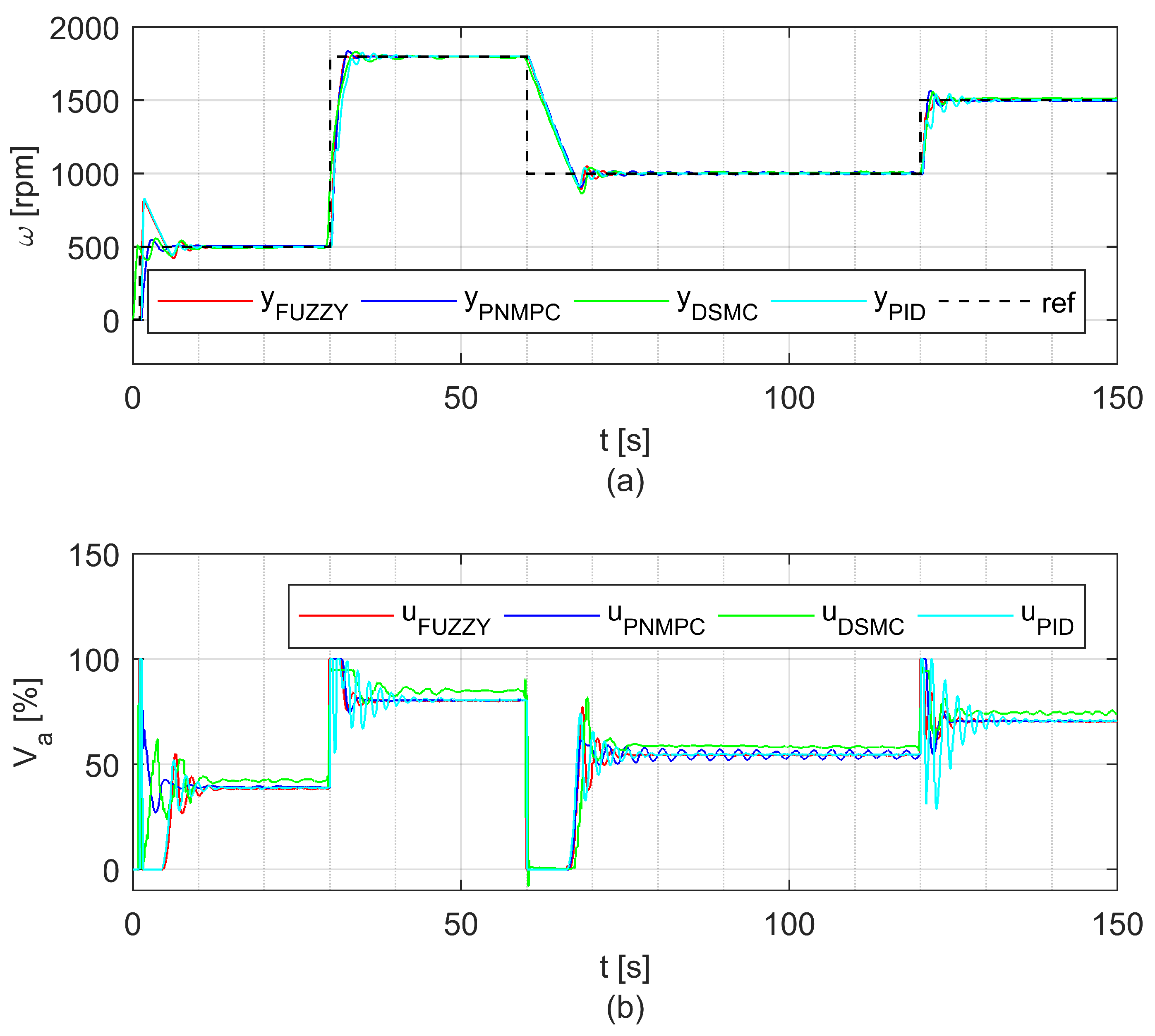
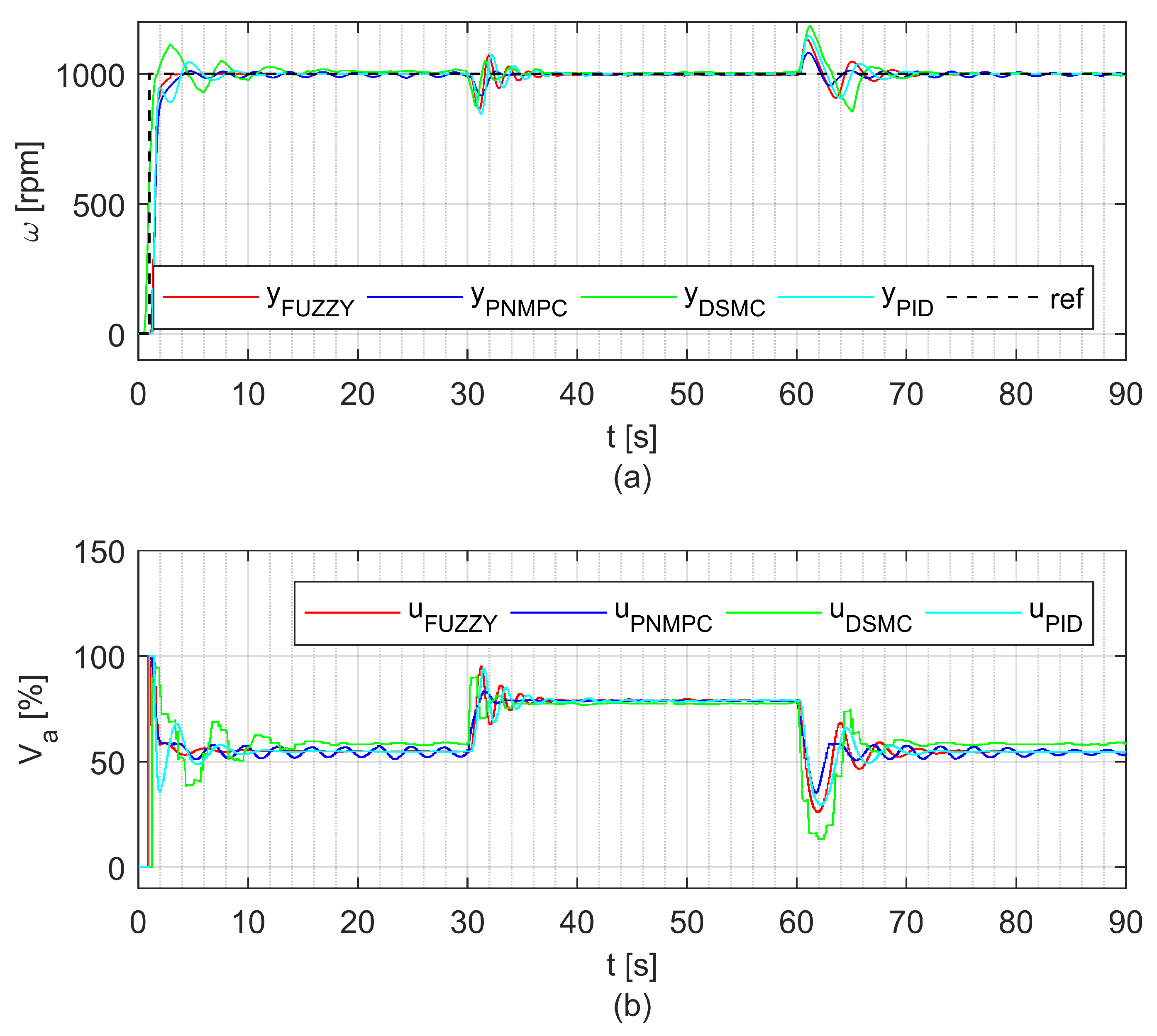
In the comparison between the four control techniques: (i) PID, (ii) PNMPC, (iii) Fuzzy and (iv) DSMC, we presented the characteristics in the performance of each of the controllers. The results indicate the expected performance for the controllers, low values, rise time , settling time , load insertion stabilization time and load removal stabilization time .
In general, the controllers showed responses with similar dynamics, but from an implementation point of view, each technique has its own particularities: the PID control stood out for its simplicity in implementation; however, despite having wide applications, it has difficulties in situations of nonlinearities and noise. The PNMPC, despite being extremely efficient in nonlinear plants, is extremely dependent on the model and requires high computational effort, since it needs to run the model in parallel with the control. The Fuzzy controller showed low mathematical dependence, requiring only the knowledge of the system. The DSMC, despite using mathematical analysis, stands out in design for its robustness, presenting itself as insensitive to the parametric uncertainties of the plant.
The PID control showed a significant trade-off relationship between the spare signal value and the rise time,
, as verified by Dubey et al. [
42]. This relationship shows that lower rise values are related to an increase in the overshoot. The responses of the Fuzzy, PNMPC controllers confirmed the direct model independence mentioned in the works of Kovacic and Bogdan [
43] and Yang et al. [
44]. The dynamic complexities associated with the control of nonlinear systems are generally factors that make it difficult to tune the PID control parameters. Thus, differently from the methodology of linearization of the plant for tuning these parameters, proposed by authors such as Wang [
45], Lan and Woo [
46] and Iplikci [
47], the use of genetic algorithms allowed the results of PID control to be close to the other techniques studied. The PID controller is based on a linear control technique. To adjust the parameters of this controller in a non-linear system, it is necessary to consider several operating points. However, the optimized values obtained for these parameters use the proposed simulator, which considers several scenarios with different dynamics. Thus, it is expected that this controller can present satisfactory performance even though the plant is non-linear.
For the implementation of the PID control, an anti wind-up mechanism was used. This was necessary because the control action reached its maximum limit, remaining this value independent of the process output variable. Thus, if this mechanism was not implemented, the error would continue to be integrated and the integral term would become very large, which would promote a slow correction of the output variable.
In this way, this work contributes to the gathering and comparison of different control techniques applied to the same plant with nonlinear characteristics. These techniques have their tuning parameters obtained from the optimization by genetic algorithms. Since this is a practical implementation, it is worth mentioning the obstacles encountered in the construction and configuration of the system. During the execution of the work, changes in the plant were necessary, such as the implementation of field current control, in order to avoid variations in the armature voltage due to electromagnetic interactions. The switching of the converters inserted electrical and electromagnetic noise in the system, making it difficult to read the variables. To solve the problem, filters and shielded cables were installed for conditioning of the measurement of voltage, current and motor speed.
It was observed that the motor temperature has a direct influence on its performance, interfering with the output speed. Even with forced ventilation, periods of operation with prolonged machine running time can cause disturbances in the system. The three-phase converter also received ventilation, in order to provide more stability in the armature supply. The tripping circuit of the three-phase rectifier had ceramic capacitors replaced by polyester capacitors, for being more resistant to thermal alterations.
In the proposal of this work, since the system is composed of motor, converter, trigger circuit, acquisition board and others, it is necessary to represent all these elements in the modeling. As the PNMPC uses the model to calculate its control action, the closer the model is to the real system, the better results will be extracted from this controller. The approximation of the model has a direct effect on the controller tuning, enabling the genetic algorithm to find values for the controller parameters that have and acceptable dynamic behavior.
It was observed that operating under different conditions, the four controllers present similar behavior, in which both achieve satisfactory results. Despite having met the desired results, there is still to explore such as: (i) embed the controllers on the bench, eliminating the use of a computer, (ii) perform the system modeling by using other methods such as neural networks, (iii) replace the three-phase fully controlled rectifier by a dual converter, enabling reversal in the direction of rotation of the motor and (iv) replace the AC-DC converter by a DC-DC converter.
For the speed control methodology adopted, changing the armature voltage and keeping the field constant, it is essential that the field exists before the application of the armature voltage. Hence, it is necessary that the electric control logic does not allow the existence of armature voltage without the presence of a magnetic field because if this condition is not met, there will be increasing acceleration of the rotor until the armature winding breaks, and the mechanical components of the motor may be compromised.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}