1. Introduction
Recently, uncertainty quantification (UQ) in computational fluid dynamics (CFD) has become an important issue in the improvement of computational performance and the reduction in computational cost in many engineering problems, such as hypersonic flow simulation for aero vehicles [
1], heat and fluid flow simulations in nuclear reactors [
2], and blood flow simulation in the vessels [
3], etc.
Uncertainty quantification methodology can be divided into two types, depending on the presence or absence of a feedback process of statistical random inputs—the forward problem and the inverse problem [
4]. The forward problem sets up the probability distribution of random inputs, calculates the amount of propagation of the inputs to the output, and calculates the quantities of interest (QoI) based on the selected UQ method. However, in the reverse problem, Bayesian inference is applied to estimate the statistics of random inputs, called a posterior distribution, using observation data with experimental or synthetic data.
In the case of the forward problem, Shaefer et al. [
5] adopted the point-collocation nonintrusive polynomial chaos (PC-NIPC) method for aerodynamic flow simulation with turbulence models. They [
5] investigated the effect of sampling a number of random inputs depending on the polynomial order and the probability distribution of aerodynamic performance according to the statistics of turbulence model coefficients. The model coefficients of the Spalart–Allmaras (SA) turbulence model and k-ω family models were assumed to be uniform distributions with reasonable intervals, and the geometry of the RAE 2822 airfoil and an axisymmetric bump were considered. The coefficients that contribute most to uncertainty in the results were presented according to each model and the adopted geometry.
Cheung et al. [
4] proposed the methodology and process of Bayesian uncertainty quantification for the calibration and prediction of the model coefficients and combined them with a CFD simulation. They [
4] investigated the effect of stochastic model classes with no uncertainty, independent Gaussian uncertainty, and correlated Gaussian uncertainty. The coefficients of the SA turbulence model were calibrated from the simulation of a flat plate boundary layer and its experimental data. They used a deterministic boundary layer solver directly instead of the surrogate model for the adaptive multilevel algorithm based on Markov chains. Their results emphasized the importance of model inadequacy and observation error in the uncertainty model, and the model class with correlated Gaussian uncertainty offered the best probabilistic results.
OCED Nuclear Energy Agency (NEA) published a review report on the UQ methodologies and the applicability of proposed UQ in CFD for nuclear safety and the regulation of equipment and components [
6]. They divided the category of the possible application of single-phase CFD for Nuclear Reactor Safety (NRS) into domains and proposed a degree of maturity to each UQ method and proper choice depending on the subdomain. In Chapter 10 of the report [
6], one case of uncertainty quantification for mixing flow CFD results was introduced. This forward problem adopted the nonintrusive generalized polynomial chaos expansion (GPCE) method and estimated the uncertainty of the predicted velocity, concentration, and turbulent quantities through comparison with experimental data in the Paul Scherer Institute GEMIX facility.
In the present work, the venturi tube, which is one of the important components in the field of in-service testing during reactor operation, is considered for Bayesian uncertainty quantification combining the CFD method.
The venturi tube includes cavitating flow where the vapor bubble is formed due to the phase change by a local pressure drop. In addition, the surface roughness may affect the venturi tube’s inherent function and operability of the safety-related system. However, the accurate prediction of the cavitating flow is still a challenging issue because of the model’s inadequacy in CFD and the measurement difficulties in experiments. This implies that the uncertainty of cavitating flow simulation inside a venturi tube installed at the in-service testing-related systems should be investigated with respect to the adopted cavitation model and operating conditions.
Barre et al. [
7] conducted both the experiments and the numerical simulations on the cavitating flow with attached sheet cavitation in a venturi geometry. They proposed a new double optical probe measurement methodology and vapor detection algorithm to measure the void fraction and velocity profiles in the venturi tube. For the computational simulation, a barotropic approach and Yang and Shih k-ε turbulence model [
8] were adopted. They showed that the simulation results are in good agreement with experimental data in a stable zone of cavitation but that there were some discrepancies in the flow velocity and void fraction profiles in the rear part of the cavitation sheet. Additionally, the sensitivity analysis of AMIN, the parameter which links the fluid density to the local pressure in the barotropic model, is conducted for better prediction of cavitating flow features [
7].
Rodio and Congedo [
9] applied a nonintrusive stochastic chaos method to the CFD solver to analyze the uncertainty affecting the prediction of cavitation flow in a venturi tube. The Schnerr and Sauer cavitation model [
10] and k-ε turbulence model were employed. For uncertainty quantification, one model coefficient (η) and two flow conditions (inlet pressure and velocity) were considered as random variables. They found that the inlet boundary conditions are dominant contributors to the model uncertainty. In addition, a simple algorithm to obtain the optimized parameter of epistemic uncertainty was proposed.
Goel et al. [
11] performed the model validation in a transport-based cryogenic cavitation model for a simple 2D hydrofoil and studied the cavitation model parameter and uncertainties with respect to temperature using surrogate-based global sensitivity analysis. They found that the model parameter associated with the evaporation was more dominant than the parameter of material uncertainty. The optimized model parameters of the transport-based cavitation model were presented in the cryogenic cavitation flow.
Ge et al. [
12,
13,
14] investigated the thermal effect on hydraulic cavitation dynamics through experiments. They confirmed that the thermal effects showed a significant role and inhibited the growth of the sheet cavity as the temperature increased. Moreover, it was found that the re-entrant jet triggered the detachment of the attached cavity and unsteadiness.
In the current work, a CFD simulation for the venturi tube flow is combined with the Bayesian inference methodology to quantify the uncertainty of simulation results. First, the cavitation model coefficients are calibrated based on Bayesian inference with the experimental data from observations. Next, using the calibrated model coefficients from the previous section, the uncertainties of the simulation results are quantified using the PC-NIPC method for the forward problem. In this case, two operating conditions of the inlet velocity and the wall roughness at the venturi tube boundary are considered uncertain parameters, and the QoI are the cavitation area and the profiles of void fraction and velocity. In this regard, one of the present co-author [
15,
16] successfully predicted the location of flow leakage caused by the cavitation erosion and found that the averaged vapor volume fraction tended to increase as the surface roughness decreased in the multistage orifice.
This paper is organized as follows.
Section 2 presents the governing equation for the simulation of the cavitation flow in the venturi tube and the overall procedure of Bayesian inference. The PC-NIPC model for the construction of the surrogate model is explained briefly. Then, the procedure to calculate the likelihood function, including model inadequacy and observation error, is presented. In
Section 3, the venturi geometry and operating conditions are described, and the deterministic solution is validated through comparison with experimental data. To quantify the uncertainty of the grid resolution, the grid convergence index (GCI) is analyzed with respect to coarse, medium, and fine meshes.
Section 4 presents the results of the Bayesian inference of ZGB model coefficients. In
Section 5, the two operating conditions of inlet velocity and wall roughness are considered, and the uncertainty of the cavitation area is quantified for the forward problem.
4. Bayesian Inference of ZGB Model Coefficients
In this section, the Bayesian inference of ZGB model coefficients is conducted following the procedure presented in
Section 2.3. The first step for Bayesian inference is to determine the random inputs and their prior distribution. In the present work, four coefficients of the ZGB cavitation model are selected as the random inputs, as shown in
Table 8. Additionally, two more parameters of model inadequacy and observation error are considered. Because of the lack of knowledge of the model coefficients, it is assumed that these have a uniform distribution. Edeling et al. [
29] mentioned that the prior interval of random inputs was selected based on three factors: the spreads of coefficients proposed by the original model, the ranges of these for which the solution was stable, and the avoidance of apparent truncation of the posterior at the edge of the prior range. Since the range of the model coefficients was not presented in the original literature, Zwart et al. [
18], the range of each coefficient is initially guessed as ±50% with respect to the original mean initial value. However, since the posterior probability distribution through the calibration procedure is not constrained to the initial prior intervals, the prior range is modified with a wider one or is translated with proper values, as recommended by Edeling et al. [
29]. The final ranges of the prior distribution of the four model coefficients are shown in
Table 8.
The next step is to construct the surrogate model based on PC-NIPC [
23] using the sampling data of the random inputs. The calculated sampling number based on PC-NIPC is 30 with a second-order polynomial, two chosen for the oversampling rate, and four random variables.
where
is the covariance matrix of the summation
model inadequacy and
observation error [
4]. Details regarding the prior distribution are shown in
Table 8.
The void fraction profile in the experiment [
7] is set to QoI with the assumed error of ±5% and then is adopted as the observation data for Bayesian inference.
To obtain the sample of the posterior distribution, the AIES [
27] algorithm is employed with 500 parallel runs of 2000 steps. Each PDF of a parameter was approximated by a kernel density estimation with half of the sample burn-in. After Bayesian inference based on the mentioned procedures, the calibrated model coefficients can be obtained. The posterior distributions of the calibrated coefficients are shown in
Figure 4, and the posterior mean values are presented in
Table 9.
As shown in
Figure 4, the calibrated coefficients are constrained inside the finial prior interval, which means the prior range of the model coefficients is appropriate. The posterior means of
and
are decreased from their nominal values, but the posterior means of
and
are increased after Bayesian inference considering the profile of void fraction as QoI. Since the peak of the void fraction at X = 73.9 mm is predicted to be 75% larger than the original ZGB model coefficients, Bayesian inference adopting the experimental data of the void fraction profile as observation data makes the calibrated model coefficients predict smaller values. The coefficient,
, in the ZGB model is related to the production term, and the decrease in this coefficient induces smaller production in the governing Equation (1). The coefficients of
and
are multiplied in production and destruction terms, respectively. It should be noted that
is calibrated as the value 52, larger than the original value of 50, which is a small increase of 4%. In contrast, the coefficient
is increased by 30% from 0.01 to 0.013 and then induces an increase in the destruction of cavities.
The void fraction and velocity profiles with the calibrated model coefficients at the station of X = 73.9 mm are presented with the experimental data [
7] and the simulation result with the original coefficients in
Figure 5. The prediction of the void fraction is 75% better than that of the original prediction, and the velocity profile is still able to correctly predict the recirculation zone. At the other two stations (X = 5.1 and 38.4 mm), there is a small difference, within 2%, in the void fraction and velocity profiles between both cases. This means that the calibrated model coefficients have little effect on the flow properties of the upstream part. If the velocity profile is adopted as observation data, the model coefficients will be calibrated for a better prediction of the velocity profile.
Figure 6 shows the contours of the void fraction with the calibrated model coefficients. It is confirmed that the cavitation area and the sheet length are smaller than the values predicted by the original model.
5. Uncertainty Quantification with Respect to Operating Conditions
In this section, the uncertainty with respect to the operating conditions in the venturi tube is quantified based on the calibrated ZGB model coefficients. Overall procedures of the corresponding forward problem are (1) the selection of random variables and the determinations of the distributions and their ranges, (2) the definition of QoI, (3) the sampling of random variables depending on the polynomial order and number of inputs, (4) construction of the PC-NIPC model [
23], and (5) the calculation of the statistical distribution of QoI and postprocessing.
The considered uncertain input variables are the inlet velocity and the roughness of the wall, which are known as important parameters influencing the flow characteristics of a venturi tube [
30,
31]. The inlet velocity is modeled as a Gaussian distribution with 10% variation with respect to the given condition, 10.8 m/s. The wall roughness is assumed to be uniform from 0.0001 m to 0.001 m, as shown in
Figure 7. In the present work, a wall roughness of zero, an ideally smooth wall, is not considered from the engineering point of view. The QoI is set to the cavitation area for direct comparison with the previous simulation result. The sampling number is determined from 12 to 112, considering the polynomial order from second to sixth orders and the oversampling rate from 2 to 4 for the two input variables and one QoI. The Latin hypercube sampling methodology is adopted to sample random variables, and the PC-NIPC model is constructed for the surrogate model depending on the polynomial order. The leave-one-out (Loo) error, which is an indicator of the proper polynomial order and sampling number, has a minimum of 2.13 × 10
−2 at the fourth polynomial order and an oversampling rate of 4.
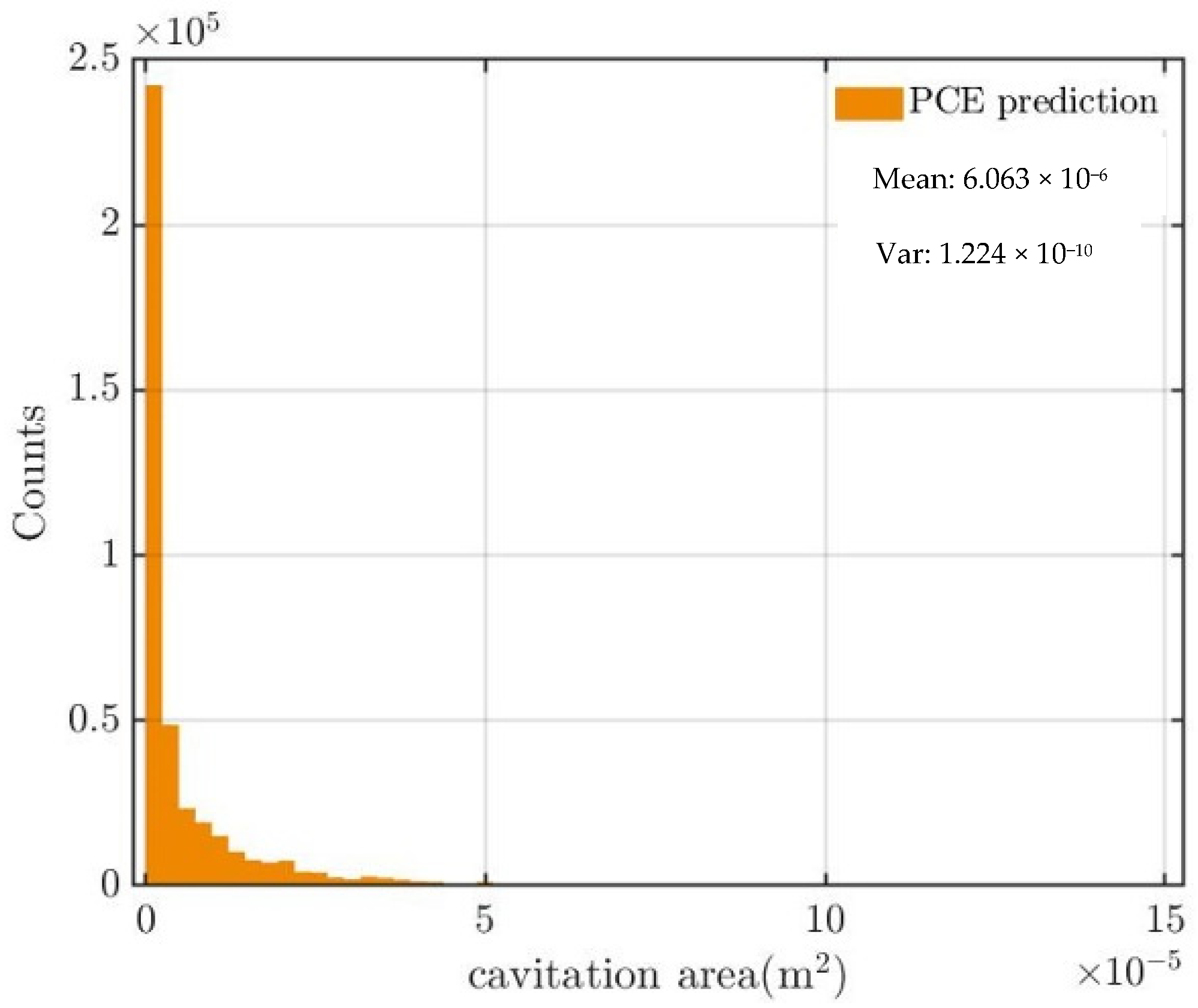
Figure 8 shows the histogram of the cavitation area, which is the QoI in the present section, according to the variation of operating conditions. The distribution of the cavitation area is similar to an exponential distribution which peaks at areas close to the order of 10
−6 m
2. The mean of the cavitation area (6.063 × 10
−6 m
2) is reduced by 42 times compared with the deterministic solution (2.52 × 10
−4 m
2) for the fixed velocity and smooth wall.
Additionally, the sensitivity of input variables is analyzed using the Sobol index. The Sobol indices of the inlet velocity and wall roughness are calculated as 0.59 and 0.72, respectively. This means that the roughness has much more effect on the cavitation area, the QoI, than the inlet velocity.
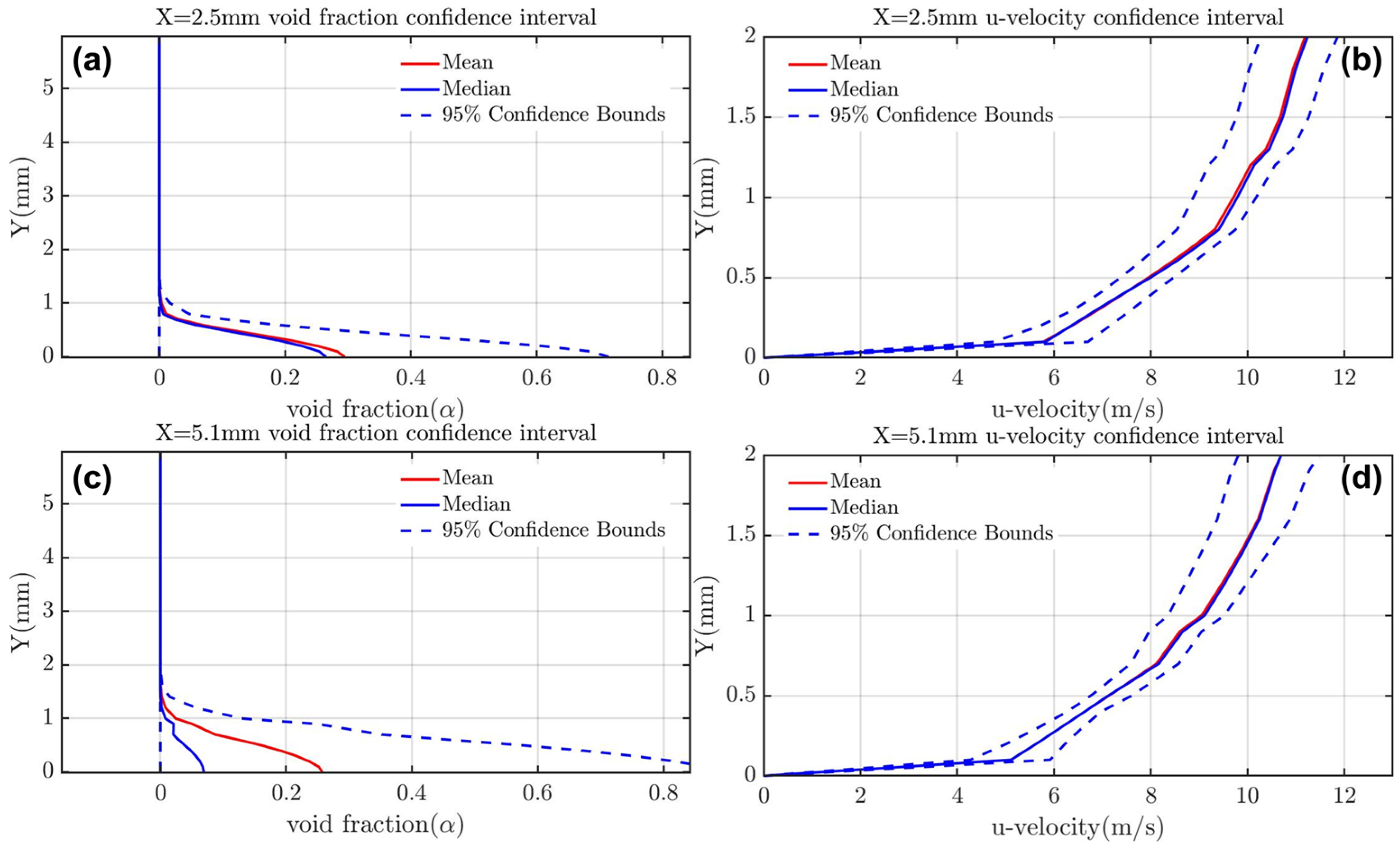
Figure 9 shows the profile of the void fraction and the longitudinal velocities at the two stations of X = 2.5 mm and 5.1 mm. The mean and median values of both are respectively presented in black and orange lines, and the dashed line corresponds to the 95% confidence bound as a result of the uncertainty quantification. In the void fraction profile, there are large 95% confidence bounds starting from 0 to 0.9. However, the velocity profiles show a 95% confidence interval within 10% of the mean value. This means that the wall roughness has a very large effect on the ZGB cavitation model, and the cavitation behavior is affected by the wall roughness. Further investigation of the uncertainty quantification between the cavitation model and wall roughness seems to be necessary. The median area of the void fraction at X = 5.1 mm is predicted to be as small as one-third of the mean value, which means that the distribution of the cavitation area resembles the exponential function.
The contours of the void fraction and longitudinal velocity are presented in
Figure 10. It is confirmed that the length of the cavitation sheet is shortened before X = 38.4 mm and that a recirculation zone is shown near X = 38.4 mm.
6. Conclusions
In the present work, Bayesian inference of the cavitation model coefficients is conducted in the venturi tube flow, and the calibrated model coefficients are applied to the venturi tube flows, which have the same geometry and flow condition as those in Barre et al. [
7].
To validate the deterministic solution, the profiles of the void fraction and longitudinal velocity at three stations are compared with experimental data and simulation results by Barre et al. [
7]. The void fraction profiles agree well with the reference ones at the front two stations and show better prediction than the simulation result by Barre et al. [
7]. The prediction of the turbulent boundary layer inside and outside cavitating zone fails, which is consistent with Rodio and Congedo’s [
9] simulation results, but the recirculation zone is predicted correctly.
GCI analysis by the SLS-CGI method [
21] is conducted with respect to the global parameters and cavitation area and shows 2.53 × 10
−4 for the extrapolation value (
fc), 4.22 × 10
−6 for the estimation error (
Ue), and 1.12 × 10
−5 for the uncertainty error (
UG). In addition, it is confirmed that the adopted medium mesh with a value approximately equal to the cavitation area of 2.52 × 10
−4 is appropriate.
For Bayesian inference of ZGB model coefficients, four model coefficients are calibrated, and the covariance matrix, which is proposed by Cheung et al. [
4], including model inadequacy and observation error, is considered. After initial guesses of the uniform prior intervals of (±50%) of each model coefficient, the range of each is modified with the criteria that the posterior range by Bayesian inference should be constrained inside the prior one. Posterior means of
and
are decreased from their nominal values, but posterior means of
and
are increased to decrease the void fraction at the third station at X = 73.8 mm. The velocity profile at all stations shows little change after Bayesian inference. However, there are still large discrepancies in the prediction of velocity and void fraction after observation data are accounted for by Bayesian inference. This means that the perturbation of cavitation model coefficients is not sufficient to remedy the model deficiency. In future work, the other parameters, such as turbulence model inadequacy and discretization error, should be considered simultaneously as uncertain inputs for Bayesian inference [
32,
33].
Finally, the forward problem with respect to the operating conditions, including the inlet velocity and the wall roughness, is conducted based on the PC-NIPC model with a fourth-order polynomial and an oversampling rate of 4. Therefore, 60 cases are sampled with the Latin hypercube sampling method. When the uncertainty of the wall roughness is considered, in contrast with the previous general simulation with a smooth wall, the cavitation area is decreased 42 times, and the variation of the void fraction is very large, ranging from 0 to 0.9. The discrepancy between the mean and median value of the void fraction is observed. Through the sensitivity analysis with the Sobol index, the wall roughness (0.72) has more effect on the simulation result than the inlet velocity (0.59). This means that the wall roughness in the venturi-type components of the in-service testing should be considered carefully to obtain consistent results with the experiment and quantify the uncertainty of performance in the venturi tube.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}