
Design and Control of a Multi-Axis Servo Motion Chair System Based on a Microcontroller


Abstract
:1. Introduction
2. System Architecture
2.1. System Overview
2.2. Closed-Loop Control Strategy
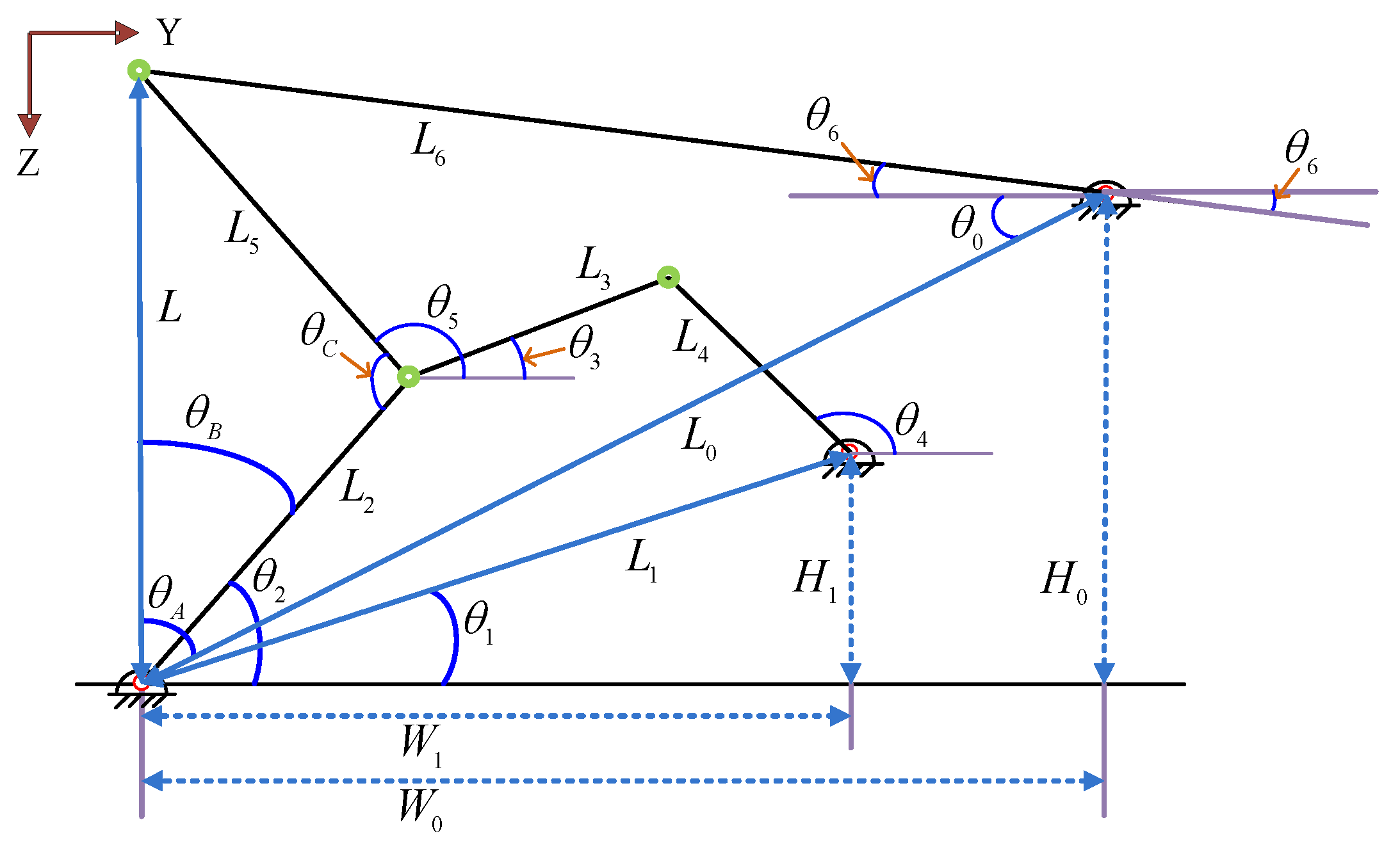
3. Inverse Kinematics Solutions
3.1. Kinematics of the Seat Pan
3.1.1. Roll Axis Design
3.1.2. Heave Axis Design
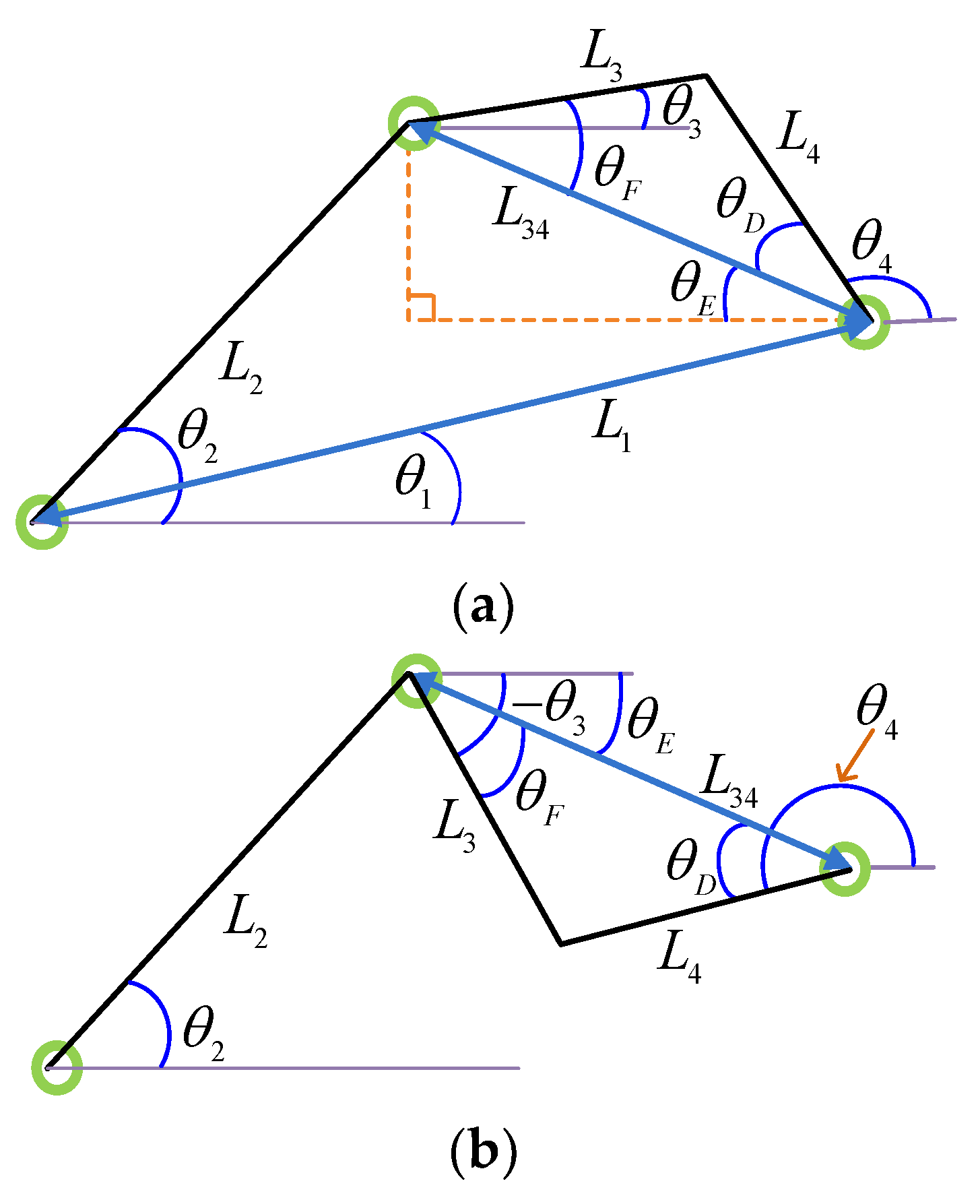
3.2. Kinematics of the Back Pad
3.2.1. Surge Axis Design
3.2.2. Sway Axis Design
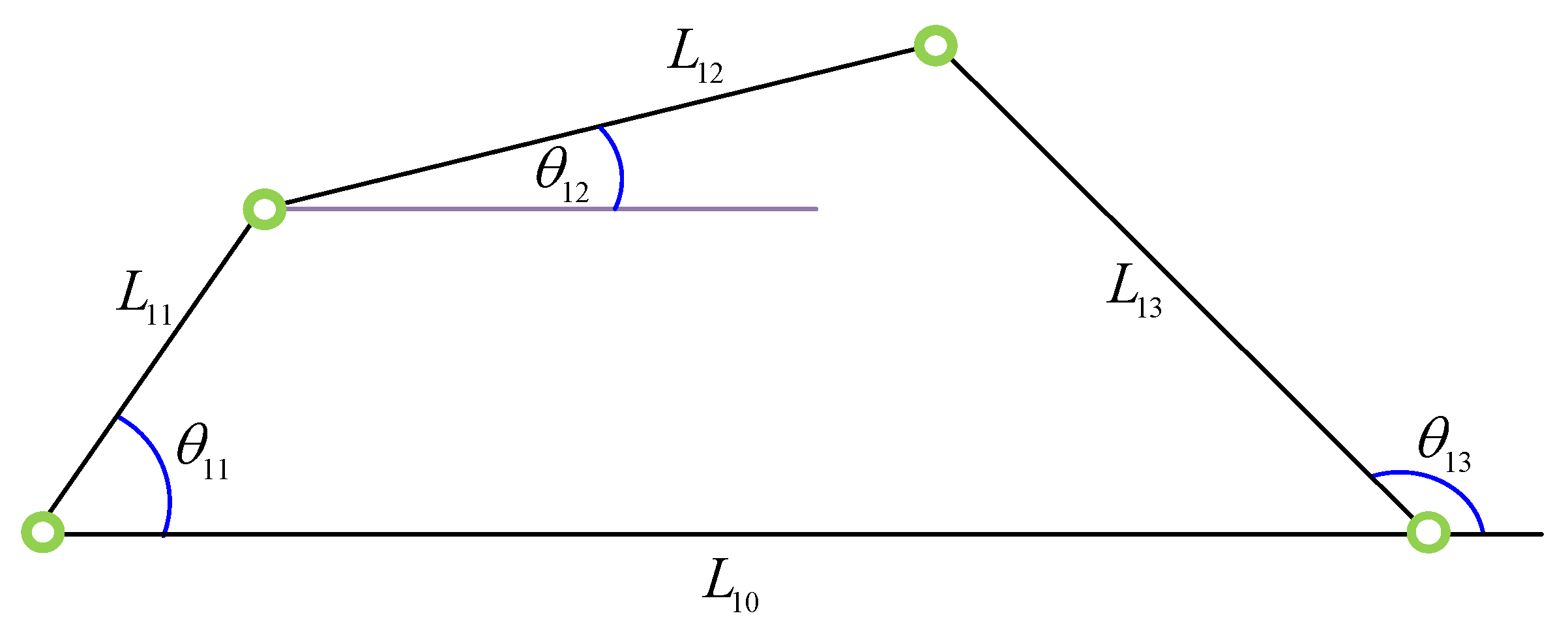
3.3. Kinematics of the Seat Height
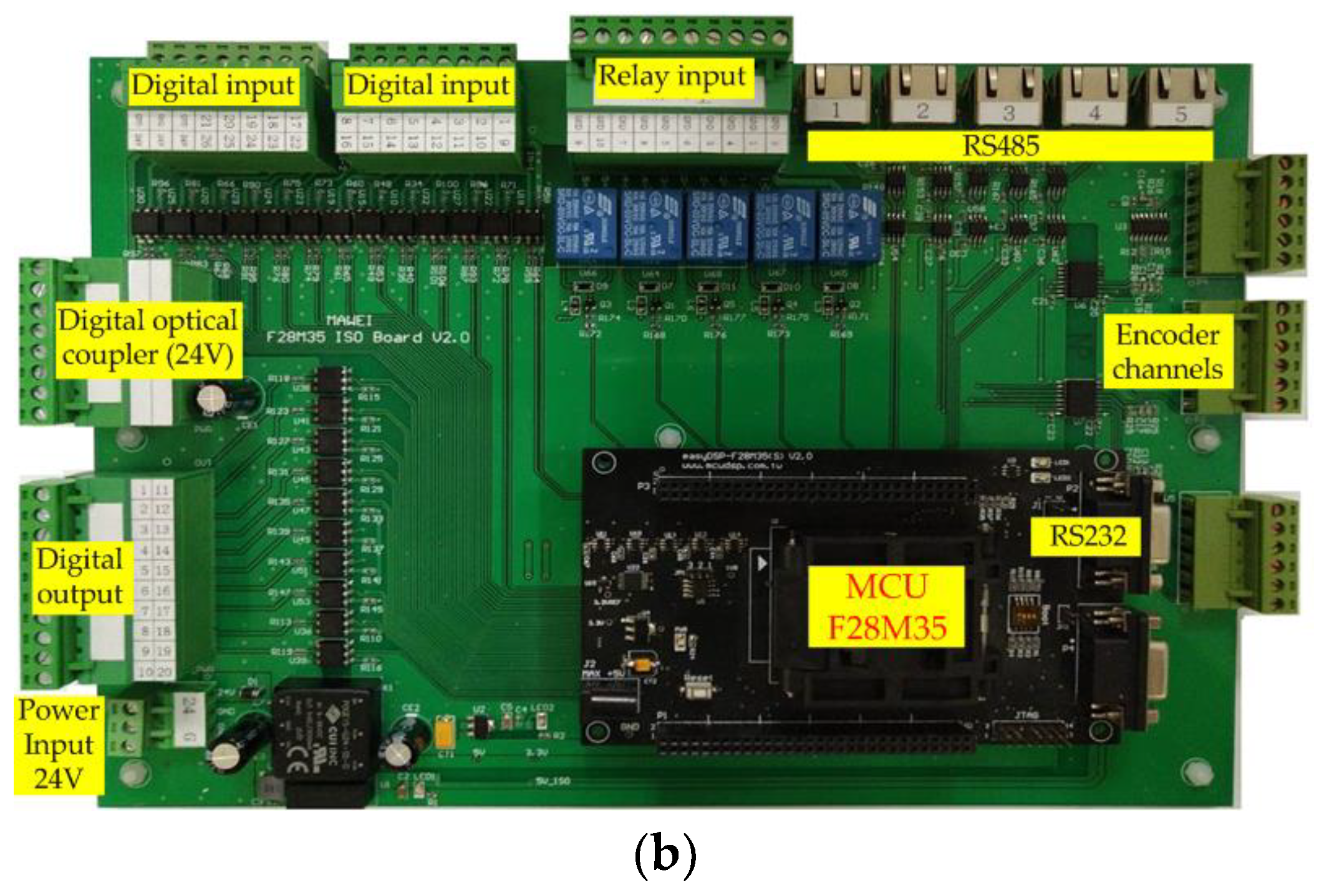
4. Implementation
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hammoumi, A.E.; Motahhir, S.; Ghzizal, A.E.; Chalh, A.; Derouich, A. A simple and low-cost active dual-axis solar tracker. Energy Sci. Eng. 2018, 6, 607–620. [Google Scholar] [CrossRef] [Green Version]
- Hammoumi, A.E.; Motahhir, S.; Ghzizal, A.E.; Chalh, A.; Derouich, A. Internet of Things-based solar tracker system. In Advanced Technologies for Solar Photovoltaics Energy Systems; Springer: Berlin/Heidelberg, Germany, 2021; pp. 75–95. [Google Scholar]
- Page, R.L. Brief history of flight simulation. SimTecT 2000 Proc. 2000, 1, 11–17. [Google Scholar]
- Available online: https://en.wikiversity.org/wiki/Flight_Simulator (accessed on 28 April 2022).
- Stewart, D. A platform with six degrees of freedom. Proc. Inst. Mech. Eng. 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Gerathewohl, S.J. Fidelity of Simulation and Transfer of Training: A Review of the Problem; Federal Aviation Administration, Office of Aviation Medicine: Washington, DC, USA, 1969.
- Wei, M.Y. Design and implementation of inverse kinematics and motion monitoring system for 6DoF platform. Appl. Sci. 2021, 11, 9330. [Google Scholar] [CrossRef]
- Wei, M.Y. Design of a DSP-based motion-cueing algorithm using the kinematic solution for the 6-DoF motion platform. Aerospace 2022, 9, 203. [Google Scholar] [CrossRef]
- Lin, H.; Mcinroy, J.E. Adaptive sinusoidal disturbance cancellation for precise pointing of Sewart platforms. IEEE Trans. Control Sys. Technol. 2003, 11, 267–272. [Google Scholar]
- Gum, D.R. Modeling of the Human Force and Motion Sensing Mechanisms; Technical Report AFHRL-TR-72-54; Air Force Human Resources Laboratory: Dayton, OH, USA, 1973. [Google Scholar]
- Cardullo, F.M. Advanced G Seat for Aircraft Simulation. U.S. Patent 3,983,640, 5 October 1976. [Google Scholar]
- Berger1, D.R.; Pelkum, J.S.; Bulthoff, H.H. Simulating believable forward accelerations on a Stewart motion platform. ACM Trans. Appl. Percept. 2010, 7, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Bruschetta, M.; Chen, Y.; Cunico, D.; Mion, E.; Beghi, A. A nonlinear MPC based motion cueing strategy for a high performance driving simulator with active seat. In Proceedings of the IEEE 15th International Workshop on Advanced Motion Control (AMC), Tokyo, Japan, 9–11 March 2018; pp. 23–28. [Google Scholar]
- Toda, Y.; Asano, K.; Yamamoto, K.; Yamamoto, F.; Hayakawa, S.; Tsutsumi, S.; Ikeura, R.; Yamakawa, T.; Yoshida, M.; Tsutsui, T.; et al. Verification of reducing effect of driver fatigue increase by using the driver’s seat with two support mechanisms. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 1569–1573. [Google Scholar]
- Ishii, Y.; Ikeda, T.; Kobayashi, T.; Kato, Y.O.; Utsumi, A.; Nagasawa, I.; Iwaki, S. Investigation of the driver’s seat that displays future vehicle motion. In Proceedings of the IEEE 28th International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 14–18 October 2019; pp. 1–6. [Google Scholar]
- Halicioglu, R.; Dülger, L.C.; Bozdana, A.T. An automation system for data processing and motion generation. In Proceedings of the International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 16–17 September 2017; pp. 1–9. [Google Scholar]
- Berthoz, A.; Bles, W.; Bülthoff, H.H.; Grácio, B.C.; Feenstra, P.; Filliard, N.; Hühne, R.; Kemeny, A.; Mayrhofer, M.; Mulder, M.; et al. Motion scaling for high-performance driving simulators. IEEE Trans. Hum. Mach. Syst. 2013, 43, 265–276. [Google Scholar] [CrossRef]
- Fu, K.S.; Gonzalez, R.C.; Lee, C.S.G. Robotics Control, Sensing, Vision, and Intelligence; Mcgraw-Hill Book Co.: New York, NY, USA, 1987. [Google Scholar]
- Wang, F.; Qian, Z.; Yan, Z.; Yuan, C.; Zhang, W. A novel resilient robot: Kinematics analysis and experimentation. IEEE Access 2019, 8, 2885–2892. [Google Scholar] [CrossRef]
- Zhang, J.; Wei, H.; Shan, Y.; Li, P.; Zhao, Y.; Qi, L.; Yu, H. Modeling and experimental study of a novel multi-DoF parallel soft robot. IEEE Access 2020, 8, 62932–62942. [Google Scholar] [CrossRef]
- Mabie, H.H.; Reinholtz, C.F. Mechanisms and Dynamics of Machinery; Wiley: New York, NY, USA, 1987. [Google Scholar]
- Halicioglu, R.; Dülger, L.C.; Bozdana, A.T. Modeling, design, and implementation of a servo press for metal-forming application. Int. J. Adv. Manuf. Technol. 2017, 91, 2689–2700. [Google Scholar] [CrossRef]
- Cvok, I.; Hrgetić, M.; Hoić, M.; Deur, J.; Ivanovic, V. Design of a linear motor-based shaker rig for testing driver’s perceived ride comfort. Mechatronics 2021, 75, 102521. [Google Scholar] [CrossRef]
- Wei, M.Y.; Yeh, Y.L.; Chen, S.W.; Wu, H.M.; Liu, J.W. Design, Analysis, and Implementation of a Four-DoF Chair Motion Mechanism. IEEE Access 2021, 9, 124986–124999. [Google Scholar] [CrossRef]
- Bose, B.K. Technology trends in microprocessor control of electrical machines. IEEE Trans. Ind. Electron. 1988, 35, 160–177. [Google Scholar] [CrossRef]
- Xsens. MTi-680G RTK GNSS/INS. Available online: https://www.xsens.com/mti-680g (accessed on 10 June 2022).





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 10 mm | |
| 180 mm | |
| 3 mm | |
| 10 mm | |
| 22.5 mm | |
| , | 15 mm, 3 mm |
| , | 75 mm, 70 mm |
| 388.5 mm | |
| 52.5 mm | |
| 192.2 mm | |
| 224 mm | |
| 16 mm | |
| 4.5 mm | |
| 22.5 mm | |
| 122.5 mm |
| DOF | Surge | Sway | Roll/Heave | Adjustable Height | |
|---|---|---|---|---|---|
| Item | |||||
| Power dissipation | 0.75 kW | 1.3 kW | 3.0 kW | 2.0 kW | |
| Rated voltage | 220 V | 220 V | 220 V | 220 V | |
| Rated current | 4.3 A | 11.4 A | 14 A | 9 A | |
| Rotor inertia | 1.03 kg-cm2 | 20.77 kg-cm2 | 18.62 kg-cm2 | 12.84 kg-cm2 | |
| Rated speed | 3000 r/min | 1500 r/min | 2000 r/min | 2000 r/min | |
| Maximum speed | 5000 r/min | 3000 r/min | 2500 r/min | 2500 r/min | |
| Rated torque | 2.39 N.m | 8.34 N.m | 14.327 N.m | 9.55 N.m | |
| Maximum torque | 7.16 N.m | 23.3 N.m | 42.96 N.m | 28.65 N.m | |
| Gyroscope | Acceleration | |
|---|---|---|
| Range | ±2000 degree/s | ±10 g |
| In-run bias stability | 4 degree/h | 15 μg |
| Bandwidth (−3 dB) | 500 Hz | 500 Hz |
| Operating Temperature | −40 to 85 °C | |
| Input voltage | 4.5 to 24 V | |
| Power consumption | <1 W | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, M.-Y.; Yeh, Y.-L.; Liu, J.-W.; Wu, H.-M. Design and Control of a Multi-Axis Servo Motion Chair System Based on a Microcontroller. Energies 2022, 15, 4401. https://doi.org/10.3390/en15124401
Wei M-Y, Yeh Y-L, Liu J-W, Wu H-M. Design and Control of a Multi-Axis Servo Motion Chair System Based on a Microcontroller. Energies. 2022; 15(12):4401. https://doi.org/10.3390/en15124401
Chicago/Turabian StyleWei, Ming-Yen, Yen-Liang Yeh, Ji-Wei Liu, and Hsiu-Ming Wu. 2022. "Design and Control of a Multi-Axis Servo Motion Chair System Based on a Microcontroller" Energies 15, no. 12: 4401. https://doi.org/10.3390/en15124401
APA StyleWei, M.-Y., Yeh, Y.-L., Liu, J.-W., & Wu, H.-M. (2022). Design and Control of a Multi-Axis Servo Motion Chair System Based on a Microcontroller. Energies, 15(12), 4401. https://doi.org/10.3390/en15124401