
Conceptual Study and Development of an Autonomously Operating, Sailing Renewable Energy Conversion System


Abstract
:
1. Introduction
- Fast realisation and deployment: The SailREC System could be licensed as a ship and operate in international waters provided that favourable legislation is developed in the future under the United Nations Convention on the Law of the Sea (UNCLOS) [1]. Thus, fewer permits and authorisations might be needed;
- Cost-effectiveness: The design of a SailREC System can be optimised for mass production, causing economies of scale to take effect;
- Small footprint: Subsea infrastructure, e.g., grid connection and mooring lines, is not required;
- Tool for energy security: A SailREC System could be used by countries with limited energy resources within their territorial boundaries.
1.1. State of the Art
1.1.1. Concept of the National Institute of Environmental Studies of Japan
1.1.2. Farwind Concept
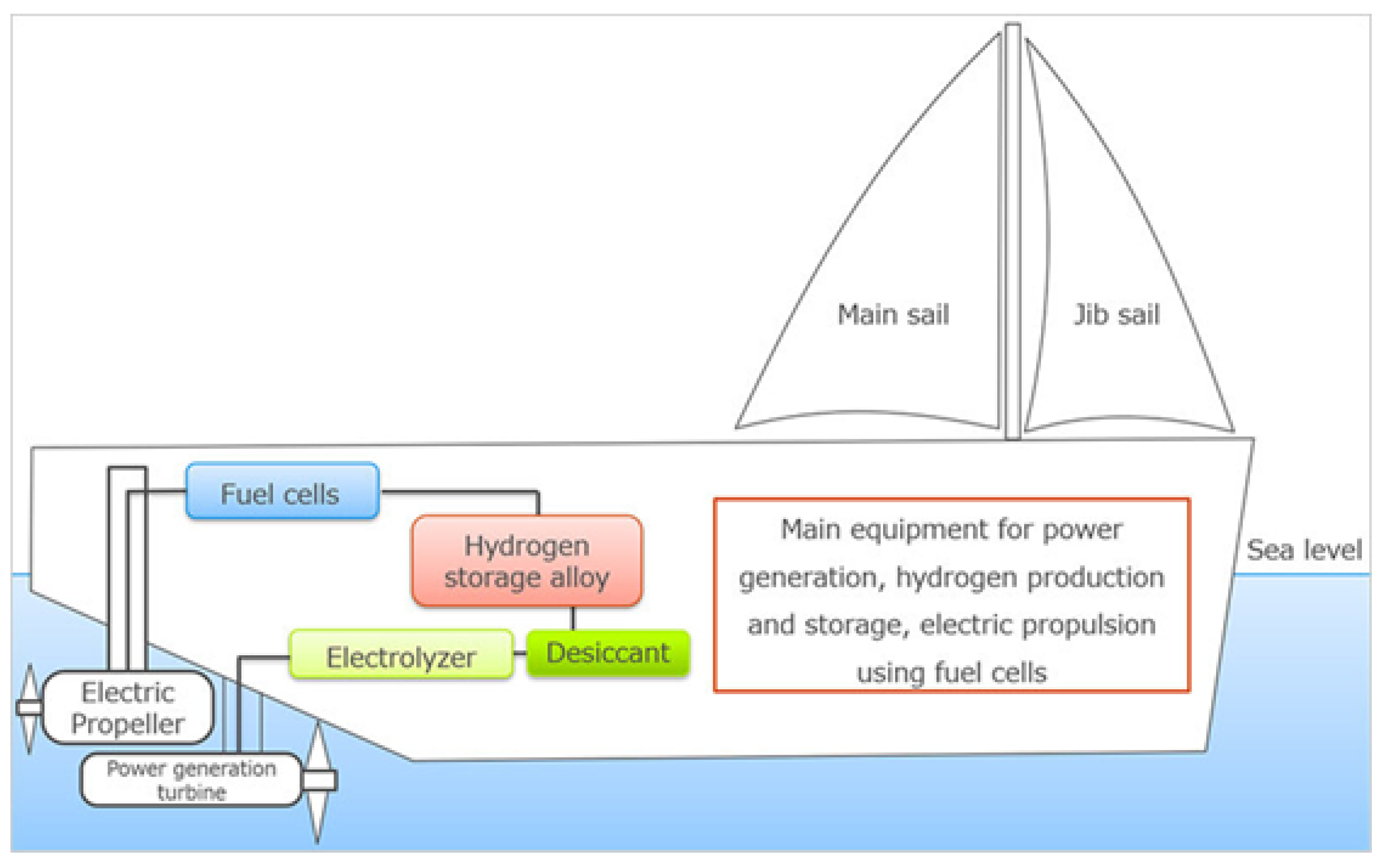
1.1.3. Wind Hunter Project
1.1.4. Other Concepts
1.2. Research Objectives and Approach
2. System Synthesis
2.1. Energy Group
2.2. Navi Group
2.3. Communication Subsystem
2.4. Position Detection Subsystem
2.5. Safety Group
2.6. Condition Monitoring Subsystem
2.7. Control Subsystems
2.8. Optional Subsystems
3. Evaluation of the Energy Conversion Subsystem and Energy Storage Subsystem
3.1. Conversion Process
3.1.1. Electrolysis
3.1.2. Hydrogen
3.1.3. Ammonia
3.1.4. Methanol
3.2. Trade Study
- For example, in the abstract representation of the model, the process for desalination as well as PSA and DAC—in the case of ammonia and methanol, respectively (cf. Appendix B.2)—are not taken into consideration;
- Furthermore, the model can be adapted for a more detailed investigation of seaborne transport and the use of pipelines and railways for transportation on land instead of trucks;
- The processes used (such as liquefier, Haber–Bosch process, etc.) are taken to be continuous processes and are assumed to be performed on the scale of the power rating of the SailREC System. From an engineering perspective, the processes could be considered batch processes. This is not modelled accordingly in the trade study. Considering buffer storage between processes and aptly power-rated processes would need further exploration.
4. Investigations on the Propulsion Subsystem
4.1. Propeller
4.2. Prime Mover and Fuel
5. Assessment of Different Sailing Strategies
5.1. Downwind&Upwind
5.2. Circle
5.3. Beam Reach
5.4. Evaluation of the Different Sailing Strategies Presented
- For Beam Reach, the highest capacity factor of all three strategies is expected: The capacity factors of systems that implement some kind of Beam Reach strategy (e.g., the FARWIND energy ship and the sailing wind farm by the NIES) are—with a mean value of 60%—20% higher than those of today’s fixed-location wind energy farms. Beam Reach likely has the highest capacity factor due to the large wind speed range at which rated power is delivered, and trajectory planning might be easier than for Circle. Beam Reach could be like Downwind&Upwind applied to a line that is perpendicular to the incoming wind. However, it is argued that Beam Reach is the strategy most difficult to realise as there are effects, such as heeling (happening because the force of a sail, i.e., thrust in Figure 9, and the force of the hull and keel systems together generate a torque, rolling a sailboat away from the wind [38]), which do not occur during downwind sailing but need to be handled when sailing beam reach;
- While Downwind&Upwind requires no special wind fields such as Circle but just wind, only a little trajectory planning is needed as the wind turbine will continuously sail down a line and ship up. Furthermore, effects such as heeling do not occur. This is why it is considered the easiest to implement out of the three sailing strategies considered. The maximum capacity factor for this strategy is limited to 50% because the wind turbine operates only half the time of one cycle. For these reasons, it is imagined that capacity factors of 20–30% are possible with Downwind&Upwind. If this guess is right, Downwind&Upwind has a lower capacity factor than a fixed-location wind turbine;
- While the hardware for Circle could be similar to that of Downwind&Upwind—it could be argued at this point that Circle does not necessarily need a propulsion system; however, this is considered too dangerous—it is more of a challenge to plan and maintain a circular trajectory. More complex software is likely required. Circle is considered one step harder to implement after Downwind&Upwind. Systems that implement a Circle strategy reach rated power at just a higher wind speed compared to fixed-location wind turbines, which is due to the drift velocity of the system. Furthermore, the capacity factor can be optimised through continuous relocation to sites with better environmental conditions and by setting the general area of operation to an area far offshore with high wind speeds. For these reasons, it is imagined that systems implementing Circle can compete with fixed-location offshore wind turbines regarding the capacity factor.
6. Description of the Developed Design
6.1. Wind Turbine
6.2. Sailing Strategy
6.3. Energy Conversion
6.4. Energy Storage
6.5. Navi Group
6.6. Payload Area
7. Discussion and Outlook
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| CAPEX | CAPital EXpenditure |
| CH3OH | Methanol |
| CO2 | Carbon dioxide |
| DAC | Direct Air Capture |
| DC | Direct Current |
| DP | Dynamic Positioning |
| H2 | Hydrogen |
| H2(g) | Gaseous Hydrogen |
| H2(l) | Liquid Hydrogen |
| IWES | Institute for Wind Energy Systems |
| LCOE | Levelised Cost Of Energy |
| NIES | National Institute for Environmental Studies of Japan |
| NH3 | Ammonia |
| N2 | Nitrogen |
| OPEX | OPerational EXpenditure |
| PEM | Polymer Electrolyte Membrane |
| PSA | Pressure Swing Absorption |
| P2X | Power to X |
| SailREC | Sailing Renewable Energy Conversion |
| TRL | Technology Readiness Level |
| UNCLOS | United Nations Convention on the Law Of the Sea |
| UoF | Use of Fuel |
| X2P | Chemical to Power conversion |
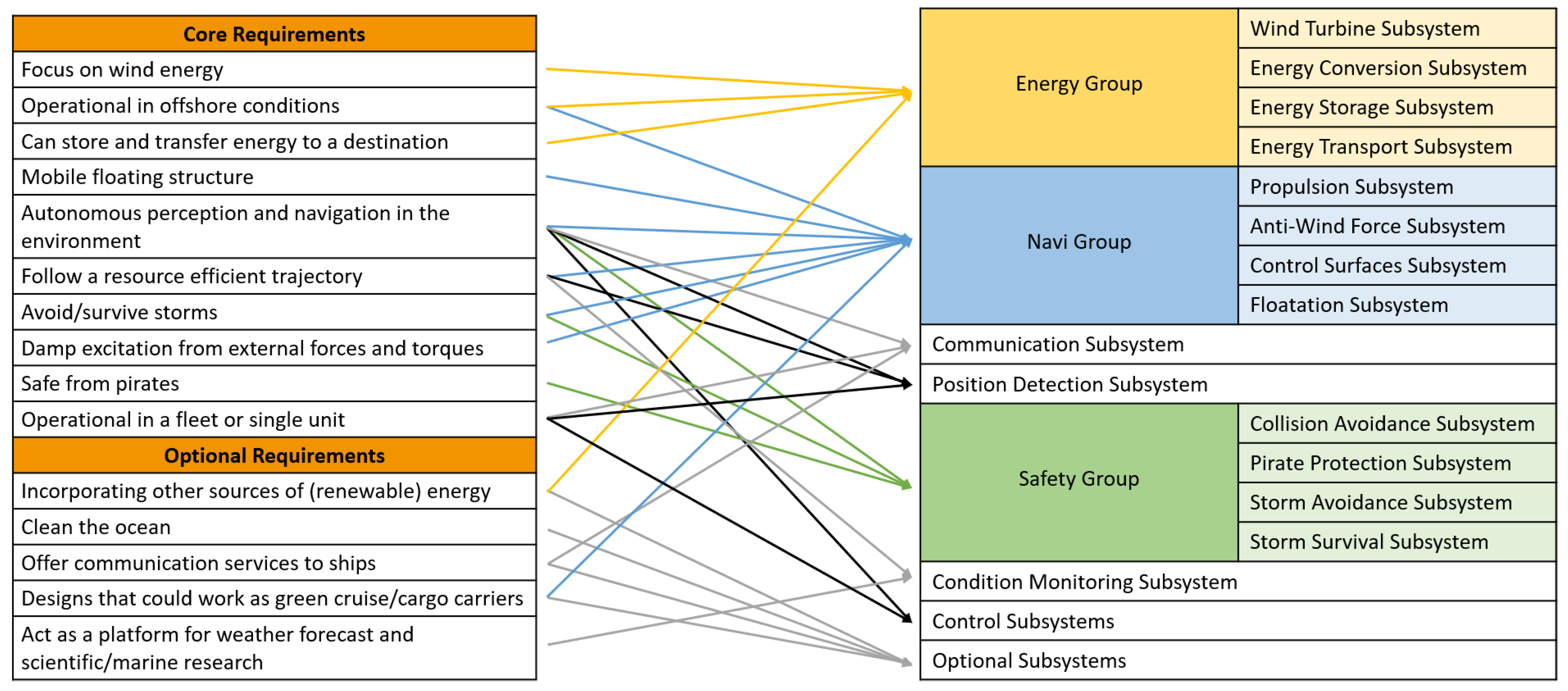
Appendix A. System Requirements

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Core Requirements |
|---|---|
| 1 | Focus on wind energy |
| 2 | Operational in offshore conditions |
| 3 | Can store and transfer energy to a destination |
| 4 | Mobile floating structure |
| 5 | Autonomous perception and navigation in the environment |
| 6 | Follow a resource efficient trajectory |
| 7 | Avoid/survive storms |
| 8 | Damp excitation from external forces and torques |
| 9 | Safe from pirates |
| 10 | Operational in a fleet or single unit |
| Optional Requirements | |
| 11 | Incorporate other sources of (renewable) energy |
| 12 | Clean the ocean |
| 13 | Offer communication services to ships |
| 14 | Designs that could work as green cruise/cargo carriers |
| 15 | Act as a platform for weather forecast and scientific/marine research |
| 16 | Possible to manufacture at a port |
| 17 | Act as a refuelling station for ships |
| 18 | Enrich biomass |
| Generic Requirements | |
| 19 | Low levelised costs of energy |
| Modular design | |
| Possibility of mass production | |
| Economically viable | |
| Low and easy maintenance | |
| Ease in stored energy delivery | |
| 20 | High reliability |
| 21 | Long lifecycle |
| 22 | Sustainable design |
| 23 | Pragmatic design solution |
| 24 | Safe for environment and marine life |
Appendix B. Detailed Results of the Trade Study on Energy Conversion and Energy Storage Subsystems
Appendix B.1. Calculation Approach for the Trade Study
- The shape of the tanks is assumed to be a cylinder.—Use of spherical tanks could be better as their volume to surface area ratio is higher, reducing the losses due to heating. They are also stronger than cylindrical tanks with the same wall thickness. However, the spherical tanks are costlier to manufacture [50].
- The tank material is stainless steel except for gaseous hydrogen, for which carbon fiber is used.—Another method could be the use of a stack of gas bottles, each having a smaller diameter, if only materials of lower allowable stress can be used.
- Only material costs are considered for tank CAPEX.
- The cooling loss of fuels that are not stored at ambient temperature is calculated as the heat energy flowing into the storage tank. In the case of liquid hydrogen and ammonia, they need to be stored in so-called Dewar tanks—double-layered tanks where there is a vacuum maintained between the layers.
- The required energy for transport till port through the sea and on land from port till plant with a truck is taken into account.—Other ways of transporting the fuel, such as pipelines, rail transport, etc., can be modelled in further studies. There is a major push in the direction of the development of hydrogen transport infrastructure such as the hydrogen grid [52].

Appendix B.2. Flow Charts for the Different Storage Options



Appendix B.3. Variable Values for Specific Use Case
| Variable | Value Requirements |
|---|---|
| Rated power of the turbine | 4 MW |
| Capacity factor of the turbine | 0.38 |
| Days of energy farming | 45 |
| Distance to port for offloading | 1000 km |
| Days of transport | 60 |
| Transport to shore solution | Tanker |
| Distance port to plant | 300 km |
| Temperature of air, water | 11 °C, 5 °C |
Appendix C. Boundary Conditions for the Calculation of the Effective Power Curves
| Variable | Value |
|---|---|
| 1.33 | |
| 0.0045 | |
| 17,671.458 m2 | |
| 0.1 | |
| 0.01 | |
| 1.225 kg/m3 | |
| 1000 kg/m3 | |
| 0.399 | |
| 0.22 | |
| 0.29 | |

References
- United Nations. United Nations Convention on the Law of the Sea of 10 December 1982. 2001. Available online: https://www.un.org/depts/los/convention_agreements/texts/unclos/UNCLOS-TOC.htm (accessed on 22 April 2022).
- Manabe, H.; Uehiro, T.; Utiyama, M.; Esaki, H.; Kinoshita, T.; Takagi, K.; Okamura, H.; Satou, M. Development of the floating structure for the Sailing-type Offshore Wind Farm. In Proceedings of the OCEANS 2008—MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Tsujimoto, M.; Uehiro, T.; Esaki, H.; Kinoshita, T.; Takagi, K.; Tanaka, S.; Yamaguchi, H.; Okamura, H.; Satou, M.; Minami, Y. Optimum routing of a sailing wind farm. J. Mar. Sci. Technol. 2009, 14, 89–103. [Google Scholar] [CrossRef]
- FARWIND. Technology. Available online: https://farwind-energy.com/ (accessed on 20 July 2021).
- Babarit, A.; Clodic, G.; Delvoye, S.; Gilloteaux, J.C. Exploitation of the far-offshore wind energy resource by fleets of energy ships—Part 1: Energy ship design and performance. Wind Energy Sci. 2020, 5, 839–853. [Google Scholar] [CrossRef]
- Mitsui, O.S.K. Lines. “Wind Hunter Project” Starts—Zero-Emission Project with Wind Propulsion and Hydrogen. 2020. Available online: https://www.mol.co.jp/en/pr/2020/20080.html (accessed on 2 August 2021).
- Mitsui, O.S.K. Lines. “Wind Hunter Project” Zero Emission Ship Sailing by Wind and Hydrogen Succeeded in the Demonstration Experiment by the Yacht “WINZ MARU”. 2021. Available online: https://www.mol.co.jp/en/pr/2021/21112.html (accessed on 22 April 2022).
- Raj, A. Process for Harvesting, Storing, and Using Renewable Energy to Propel and Power Boats and Ships, and Maximize Their Average Speed. U.S. Patent 2015/0027125 A1, 29 January 2015. [Google Scholar]
- Gizara, A.R. Turbine-Integrated Hydrofoil. U.S. Patent 2007/0046028 A1, 1 March 2007. [Google Scholar]
- Meller, M. Wind-Power Linear Motion Hydrogen Production Systems. U.S. Patent 7,146,918 B2, 12 December 2006. [Google Scholar]
- Vidal, J.P. System for Propulsion of Boats by Means of Winds and Streams and for Recovery of Energy: Expired. U.S. Patent 4,371,346, 1 February 1983. [Google Scholar]
- Salomon, R.E. Process of Converting Wind Energy to Elemental Hydrogen and Apparatus Therefor. U.S. Patent 4,335,093, 15 June 1982. [Google Scholar]
- HySTRA. CO2-Free Hydrogen Energy Supply-Chain. Available online: http://www.hystra.or.jp/en/gallery/ (accessed on 19 July 2021).
- Beale, D.; Bonometti, J. Chapter 2: Systems Engineering (SE)—The Systems Design Process. Available online: https://www.eng.auburn.edu/~dbeale/ESMDCourse/Chapter2.htm (accessed on 22 April 2022).
- Rødseth, Ø.; Tjora, Å. A system architecture for an unmanned ship. In COMPIT’14; Hamburg University of Technology: Hamburg, Germany, 2014; pp. 291–302. [Google Scholar]
- Rødseth, Ø.; Lee, K. Secure Communication for E-Navigation and Remote Control of Unmanned Ships. In COMPIT’15; Hamburg University of Technology: Hamburg, Germany, 2015; pp. 44–57. [Google Scholar]
- Räuchle, K.; Plass, L.; Wernicke, H.J.; Bertau, M. Methanol for Renewable Energy Storage and Utilization. Energy Technol. 2016, 4, 193–200. [Google Scholar] [CrossRef]
- Office of Energy Efficiency & Renewable Energy. Materials-Based Hydrogen Storage. Available online: https://www.energy.gov/eere/fuelcells/materials-based-hydrogen-storage (accessed on 9 August 2021).
- Dresp, S.; Dionigi, F.; Klingenhof, M.; Strasser, P. Direct Electrolytic Splitting of Seawater: Opportunities and Challenges. ACS Energy Lett. 2019, 4, 933–942. [Google Scholar] [CrossRef]
- Guo, Y.; Li, G.; Zhou, J.; Liu, Y. Comparison between hydrogen production by alkaline water electrolysis and hydrogen production by PEM electrolysis. IOP Conf. Ser. Earth Environ. Sci. 2019, 371, 042022. [Google Scholar] [CrossRef]
- Shell International. Shell Hydrogen Study: Energy of the Future?-Sustainable Mobility through Fuel Cells and H2. Available online: https://wupperinst.org/fa/redaktion/downloads/projects/Shell_SH2S_StakeholderPresentation_080617.pdf (accessed on 3 August 2021).
- Han, D.; Liu, Y.; Huang, Z. The Use of Ammonia as a Fuel for Combustion Engines. In Engines and Fuels for Future Transport. Energy, Environment, and Sustainability; Kalghatgi, G., Agarwal, A.K., Leach, F., Senecal, K., Eds.; Springer: Singapore, 2022; Volume 42, pp. 233–256. [Google Scholar] [CrossRef]
- Siemens Energy. Power-to-X: A Closer Look at e-AMMONIA. Available online: https://www.siemens-energy.com/global/en/offerings/technical-papers/download-ptx-a-closer-look-at-e-ammonia.html (accessed on 9 June 2021).
- Lan, R.; Irvine, J.T.; Tao, S. Ammonia and related chemicals as potential indirect hydrogen storage materials. Int. J. Hydrog. Energy 2012, 37, 1482–1494. [Google Scholar] [CrossRef]
- Palys, M.J.; Daoutidis, P. Using hydrogen and ammonia for renewable energy storage: A geographically comprehensive techno-economic study. Comput. Chem. Eng. 2020, 136, 106785. [Google Scholar] [CrossRef]
- Wu, T.; Fan, W.; Zhang, Y.; Zhang, F. Electrochemical synthesis of ammonia: Progress and challenges. Mater. Today Phys. 2021, 16, 100310. [Google Scholar] [CrossRef]
- Zhen, X.; Wang, Y. An overview of methanol as an internal combustion engine fuel. Renew. Sustain. Energy Rev. 2015, 52, 477–493. [Google Scholar] [CrossRef]
- DACMa GmbH. BLANCAIR Is the First Direct Air Capture Machine that Continuously Captures Carbon Dioxide from the Ambient Air. Available online: https://www.blancair.com/wind-turbine/ (accessed on 2 August 2021).
- Siemens Energy. e-Methanol: A Universal Green Fuel. Available online: https://www.siemens-energy.com/global/en/offerings/technical-papers/download-e-methanol-white-paper.html (accessed on 9 June 2021).
- Holvik, J. Basics of Dynamic Positioning. In Proceedings of the Dynamic Positioning Conference, Houston, TX, USA, 13–14 October 1998. [Google Scholar]
- Sørensen, A.J. A survey of dynamic positioning control systems. Annu. Rev. Control 2011, 35, 123–136. [Google Scholar] [CrossRef]
- Carlton, J. Marine Propellers and Propulsion; Elsevier: Oxford, UK, 2012. [Google Scholar] [CrossRef]
- MAN Energy Solutions. Basic Principles of Ship Propulsion. Available online: https://www.man-es.com/docs/default-source/marine/tools/basic-principles-of-ship-propulsion_web_links.pdf?sfvrsn=12d1b862_10 (accessed on 13 July 2021).
- Jeong, B.; Oguz, E.; Wang, H.; Zhou, P. Multi-criteria decision-making for marine propulsion: Hybrid, diesel electric and diesel mechanical systems from cost-environment-risk perspectives. Appl. Energy 2018, 230, 1065–1081. [Google Scholar] [CrossRef] [Green Version]
- Chai, M.; Bonthapalle, D.R.; Sobrayen, L.; Panda, S.K.; Wu, D.; Chen, X. Alternating current and direct current-based electrical systems for marine vessels with electric propulsion drives. Appl. Energy 2018, 231, 747–756. [Google Scholar] [CrossRef]
- Gasch, R.; Twele, J.; Bade, P.; Conrad, W.; Heilmann, C.; Kaiser, K.; Kortenkamp, R.; Kühn, M.; Langreder, W.; Liersch, J.; et al. Windkraftanlagen; Vieweg+Teubner: Wiesbaden, Germany, 2005. [Google Scholar] [CrossRef]
- U.S. Naval Academy. Chapter 7: Resistance and Powering of Ships. In EN400: Principles of Ship Performance: Course Notes. Version: Spring 2020; U.S. Naval Academy: Annapolis, MD, USA, 2020; p. i–7–44. [Google Scholar]
- Püschl, W. Physik des Segelns: Wie Segeln Wirklich Funktioniert, 1st ed.; WILEY-VCH Verlag GmbH & Co. KGaA: Weinheim, Germany, 2012. [Google Scholar] [CrossRef]
- Vestas. 4MW Platform. Available online: https://nozebra.ipapercms.dk/Vestas/Communication/4mw-platform-brochure/?page=1 (accessed on 22 April 2022).
- IRENA. Future of Wind: Deployment, Investment, Technology, Grid Integration and Socio-Economic Aspects (A Global Energy Transformation Paper); International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2019. [Google Scholar]
- Equinor. Hywind Scotland Remains the UK’s Best Performing Offshore Wind Farm. 2021. Available online: https://www.equinor.com/en/news/20210323-hywind-scotland-uk-best-performing-offshore-wind-farm.html (accessed on 18 July 2021).
- Smith, A.Z. Germany’s Offshore Wind Capacity Factors. 2015. Available online: https://energynumbers.info/germanys-offshore-wind-capacity-factors (accessed on 11 January 2022).
- Jamil, R.A.; Chaigneau, A.; Gilloteaux, J.C.; Lelong, P.; Babarit, A. Comparison of the capacity factor of stationary wind turbines and weather-routed energy ships in the far-offshore. J. Physics: Conf. Ser. 2019, 1356, 012001. [Google Scholar] [CrossRef] [Green Version]
- Fingersh, L.; Hand, M.; Laxson, A. Wind Turbine Design Cost and Scaling Model: Technical Report: NREL/TP-500-40566. Available online: https://www.nrel.gov/docs/fy07osti/40566.pdf (accessed on 3 August 2021).
- Hydrogenics. HySTAT® HyDROGEN GENERATORS. Available online: https://pdf.directindustry.com/pdf/hydrogenics/hystat-hydrogen-generators/33492-420313.html (accessed on 22 April 2022).
- Yildiz, T. Design and Analysis of a Lightweight Composite Shipping Container Made of Carbon Fiber Laminates. Logistics 2019, 3, 18. [Google Scholar] [CrossRef] [Green Version]
- HESC. Hydrogen Energy Supply Chain (HESC): A World-First Project. 2022. Available online: https://www.hydrogenenergysupplychain.com/ (accessed on 12 March 2022).
- ASME. An International Code: 2015 ASME Boiler & Pressure Vessel Code VIII: Rules for Construction of Pressure Vessels, Division 1, 2015th ed.; The American Society of Mechanical Engineers: New York, NY, USA, 2015. [Google Scholar]
- Seeli, H.; Dorapudi, S.H.; Satish, P.V.; Kumar, S.N. Designing and Analysis of Cryogenic Storage Vessels. Int. J. Sci. Eng. Res. 2016, 7, 65–76. [Google Scholar]
- Bulling, B. Why Are Spherical Storage Tanks Prevalent in Gas & Oil Facilities? 2015. Available online: https://www.linkedin.com/pulse/why-spherical-storage-tanks-prevalent-gas-oil-bryan-bulling (accessed on 2 August 2021).
- VDI, E.V. (Ed.) VDI-Wärmeatlas, 11th ed.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Martin, N. Germany and Hydrogen €9 Billion to Spend as Strategy Is Revealed. 2020. Available online: https://www.dw.com/en/germany-and-hydrogen-9-billion-to-spend-as-strategy-is-revealed/a-53719746 (accessed on 3 August 2021).










| Trade Parameters | Unit | Parameter Values | Weights | |||
|---|---|---|---|---|---|---|
| Liquid Hydrogen | Gaseous Hydrogen | Ammonia | Methanol | |||
| LCOE | [€cent/kWh] | 24.45 | 18.81 | 38.16 | 22.29 | 10 |
| Environmental friendliness | [-] | 4 | 3 | 2 | 1 | 7 |
| Partial load capability | [-] | 3 | 4 | 1.5 | 1.5 | 5 |
| Displaced water volume | [m3] | 62.50 | 164.58 | 144.24 | 158.02 | 4 |
| TRL | [-] | 4 | 3 | 1.5 | 1.5 | 4 |
| Transport infrastructure readiness level in 2032 | [-] | 1.5 | 1.5 | 4 | 3 | 4 |
| Safety of maintenance personnel | [-] | 3 | 2 | 1 | 4 | 2 |
| Scaled and weighted final value | [-] | 29.44 | 27.27 | 18.04 | 20.14 | |
| Rank | [-] | 1 | 2 | 4 | 3 | |
| Sailing Strategy | Capacity Factor | Prated Wind Speed Range | Ease of Technical Realisation |
|---|---|---|---|
| Beam Reach | 1 | low–high | 4 |
| Circle | 2 | high | 3 |
| Downwind&Upwind | 4 | high | 2 |
| Fixed-location offshore wind turbine | 2 | medium | 1 |
| Property | Value |
|---|---|
| Wind turbine rated power, mass | 4 MW, 435 t |
| Electrolyser power, mass | 1.93 MW, 80 t |
| Time of one energy harvesting cycle | 60 d |
| Energy harvested per harvesting cycle | 1100 MWhH2 |
| Fuel to be produced | Liquid hydrogen |
| Energy storage solution, mass (including H2) | Double-walled, vacuum-insulated stainless steel tank in a containerised solution, 217 t |
| Total capacity of 40-ft equivalent containers | 44 |
| Number of 40-ft containers carried for energy storage | 14 |
| Number of 20-ft containers carried for electrolysis | 5 |
| Mass of additional hardware (e.g., liquefaction plants) | 200 t |
| System length, width | 72.2 m, 74.3 m |
| Structural mass (e.g., struts, beams) | 642 t |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rickert, C.; Thevar Parambil, A.M.; Leimeister, M. Conceptual Study and Development of an Autonomously Operating, Sailing Renewable Energy Conversion System. Energies 2022, 15, 4434. https://doi.org/10.3390/en15124434
Rickert C, Thevar Parambil AM, Leimeister M. Conceptual Study and Development of an Autonomously Operating, Sailing Renewable Energy Conversion System. Energies. 2022; 15(12):4434. https://doi.org/10.3390/en15124434
Chicago/Turabian StyleRickert, Christopher, Anurag Mohanan Thevar Parambil, and Mareike Leimeister. 2022. "Conceptual Study and Development of an Autonomously Operating, Sailing Renewable Energy Conversion System" Energies 15, no. 12: 4434. https://doi.org/10.3390/en15124434
APA StyleRickert, C., Thevar Parambil, A. M., & Leimeister, M. (2022). Conceptual Study and Development of an Autonomously Operating, Sailing Renewable Energy Conversion System. Energies, 15(12), 4434. https://doi.org/10.3390/en15124434