1. Introduction
Climate change is imminent and mitigation policies to limit global warming within 1.5 to 2 °C have been framed all over the world. An estimated 2000 locations will experience 100-year sea-level extreme events by the end of this century even limited under 1.5 °C of global warming [
1]. Record shattering climatic events are projected to happen within 2021–2050 based on the rate of global warming rather than the warming level. This probability increases 3 to 21 times in 2051–2080 [
2]. Production of clean energy without a carbon footprint is an immediate requirement and the alternative source of energy production is the future to protect the earth we know today. Free-piston Stirling engines are crankless engines, so they provide significant advantages with lower noise and vibration, longevity, low maintenance, and self-operating capabilities [
3].
Stirling engines have gained popularity and started to advance in technology in the last 50 years. The ability to harness energy above 300 °C from waste heat recovery systems has been phenomenal [
4]. Through cyclic expansion and compression of the FPSE with or without an external driving mechanism creates an oscillatory motion. To convert mechanical energy to electrical energy, linear alternators in the form of electromechanical devices to convert short-stroke oscillatory motion are used [
5]. Linear alternators can be used for generation from FPSE and actuation of the FPSE. Linear alternators are generally categorized into flat and tubular types based on the topology [
6].
The PMLAs have gained popularity due to their merits, such as high velocity, precise movement, long life, and efficiency. Therefore, they are applied in many areas, for example, power production in free-piston linear generator (FPLG) systems, wave energy converters (WEC), hybrid electric vehicles (HEV), suspension systems of HEVs, thermoacoustic engines, and electric transformers [
7,
8,
9,
10,
11,
12]. Additionally, they can be used in energy recovery systems and power production for the lunar base [
13,
14,
15]. WEC applications for PMLA have become near-perfect that the elimination of cogging forces and producing 50 KW power over long strokes at small frequency is possible [
16].
The fundamental components of a PMLA consist of permanent magnets, which are influential parameters of the PMLA performance. Radial, axial, and Quasi-Halbach arrangements of magnets are popular among different topologies used for the arrangement of magnets [
17]. In recent developments of NdFeB magnets, they have sustained to withhold temperatures close to 180 °C and their types are categorized based on demagnetization temperature [
18]. Quasi-Halbach (QH) is a topological arrangement that produces strong and weak field zones which is an advantage for specific applications. Formed by utilizing axial and radial magnets, the QH arrangement has significant performance differences based on the manner of arrangement [
19]. Apart from the utilization of QH arrangement, slot-less stators are used to accommodate coils. Soft Magnetic Composites (SMC) are used for such stators. They attract more researchers due to their high efficiency and lack cogging forces [
20]. However, precise manufacturing techniques are required to accommodate coils in slot-less stators, hence leading to high manufacturing costs.
Cogging force affects the performance of PMLA [
21]. Adjusting the surface area of the magnet, varying the volume of magnets, changing the shape of magnets on the edge of contact with the stator, and using phase belt toroidal windings are some of the mitigation methods for cogging force reduction in PMLA [
22,
23,
24].
The simulation is a preliminary step for the integration of PMLA with FPSE. A parametric analysis is required before the integration to set the most optimized condition to yield maximum performance out of it [
25]. Post-simulation, a dynamic model should be set to understand the experimental performance of the PMLA in real-time operable conditions [
26,
27].
PMLAs are strong contestants in clean energy production and share equal responsibility in FPLG systems to convert thermal energy to electrical energy. However, extreme limitations of these machines are not carried out in terms of their operating conditions. The structure of the stator studied in this study is made with a slot spacing between every tooth. Conventional linear machine stators are stationary and do not endure movement in their lifetime. Their relative mass is heavier and design choices have a constraint on the power density of the machine. The presented model in this study is a modified version of a conventional tubular PMLA. The present design of the PMLA is stringent in material use and the stator is designed in a skinner manner to decrease the overall mass and achieve a higher power density. A slot space is introduced in the space of the tooth and by doing so, elongating the tooth width. Parametric studies are not commonly found in this stream and this study is a comprehensive method of doing so by varying important parameters of the PMLA working state [
28,
29]. Moreover, we choose four important parameters such as translator operating frequency, the stroke length of the translator, stator, and magnet materials without changing any dimensional properties of the machine. Since a slot space is introduced, the effects of slotting on the performance of the machine are also studied as a sensitivity analysis. The study is aimed at understanding the best operable conditions to obtain the most out of the machine. The numerical analysis of the developed model is carried out by using commercial software, JMag Designer V18 [
30].
2. Structure and Principle of Operation
The tubular topology is preferred for its advantages over flat-type PMLA [
6]. This is a slotted machine with five slot arrangements to house coils. Conventional PMLAs consist of a slotted stator. These stators are arranged in such a way that the stacking is made uniform, and the tooth is a continuous stack of metal. To increase the power density of the machine, without changing the designed parameters of the PMLA, a slot space is introduced between each tooth and can be observed in
Figure 1. The design is modified so that the B
t and S
s are uniformly maintained at 2.5 mm. An unused tooth slot-gap T
s is introduced to create a hollow spacing and thus reduction in the use of electrical steel. The ratio between S
o and S
l is 1:1.1 for compact sizing to fit in diverse applications within FPSEs. For effective utilization of the space for high power density, the QH arrangement of magnets is used. Axially and radially arranged magnets are utilized to form a strong and weak field to form a QH pair. A uniform air gap (g) of 1 mm is maintained across the translator and stator. The geometrical parameters of the PMLA are mentioned in
Table 1. The choice of material for stator and shaft, coil, and magnets are electrical steel 35CS300, copper, and N48H neodymium magnets correspondingly.
The choice of material and assumptions made for the baseline case is backed by our previous research [
28,
29]. The induced emf in the PMLA is given by Equation (1):
where
is the magnetic flux through the coil, z is the displacement of the translator and
N is the total number of coil turns. The magnetic flux
is given by Equation (2):
where
A is the surface area of the stator tooth, and
B is magnetic flux density. The magnetic flux density is given by Equation (3):
where
is vacuum permeability,
H is the magnetic field, and
M is magnetism.
3. Numerical Module
The numerical module of the PMLA is simulated using the Finite Element Method (FEM) package JMAG Designer [
30]. The study is aimed at understanding the influence of variable parameters without changing the dimensions of the PMLA. To do so, certain parameters are kept as fixed conditions to understand the baseline performance of the machine. The geometry mentioned in
Table 1 are fixed parameters. Without varying the fixed parameters, interchangeable parameters such as materials and operating conditions are chosen for variable parameters. Stator and magnet materials can be varied and studied for the material category. Operating frequency and stroke length can be varied and studied for the operating conditions category. Thus, four variable parameters are chosen for the parametric study without making any changes to the dimensions of the PMLA.
A fixed baseline case should be studied and the result from this study is set as a benchmark for the parametric analysis of the four chosen conditions. The baseline case for the parametric variation is mentioned in
Table 2. Fixing the baseline condition, the specific mass properties of each part are mentioned in
Table 3. There are five slots, and each slot consists of 940 coil turns. The thickness of the copper coil is 0.45 mm, and the total internal resistance R
in of the coil is 5 Ω. The baseline case is run in both open and closed-loop conditions to understand the performance of PMLA. A purely resistive external load R
ex of 100 Ω is held constant for all the simulation cases.
The numerical simulation is carried out in 100-step intervals for all the cases considered. The element size of all the materials is 2 mm and the air gap element size at 1 mm. The mesh distribution of the PMLA is shown in
Figure 2. Consisting of 234,489 elements and 54,393 nodes, the mesh is maintained uniformly across the model. The same mesh distribution is maintained across all the cases considered in this study.
Figure 3 and
Figure 4 show the magnetic flux density distribution on the PMLA in contour and vector forms for the baseline case, respectively.
The cogging force by the permanent magnets on the translator forces the translator to bring an alignment with the stator tooth. The cogging force or the detent force is an important factor, which significantly affects the performance of the PMLAs. It causes noise and vibration on the translator and acts as an opposing force for the translator’s motion source. The cogging force
can be estimated based on the air-gap flux
and the derivative of the air gap reluctance
concerning
as follows:
where
is determined based on the permanent magnet magnetization length
, the permanent magnet magnetization area
by Equation (5):
It should be noted that the air gap flux
is inversely proportional to the air gap, as mentioned in Refs. [
23,
24]. For the same cause, the air gap is kept to the minimum and doable 1 mm.
The forthcoming unloaded voltage V
ul, unloaded cogging force F
ul, loaded voltage V
l, loaded cogging force F
l, loaded power P
l and total loss L are root mean square (RMS) values. For a 5 mm stroke (
) at 60 Hz on an unloaded baseline case, the cogging force is aligned with the displacement and has a sinusoidal profile.
Figure 5a shows this profile of displacement. It is evident that the vibration experienced by the translator is kept at a minimum state and ensures the stability of the machine.
Figure 5b enumerates an induced emf V
ul of 302 V with 146.9 N cogging force on the translator in
Figure 5c. The induced terminal voltage for the loaded condition can be obtained from Equation (6)
where
is induced current and it is given by Equation (7):
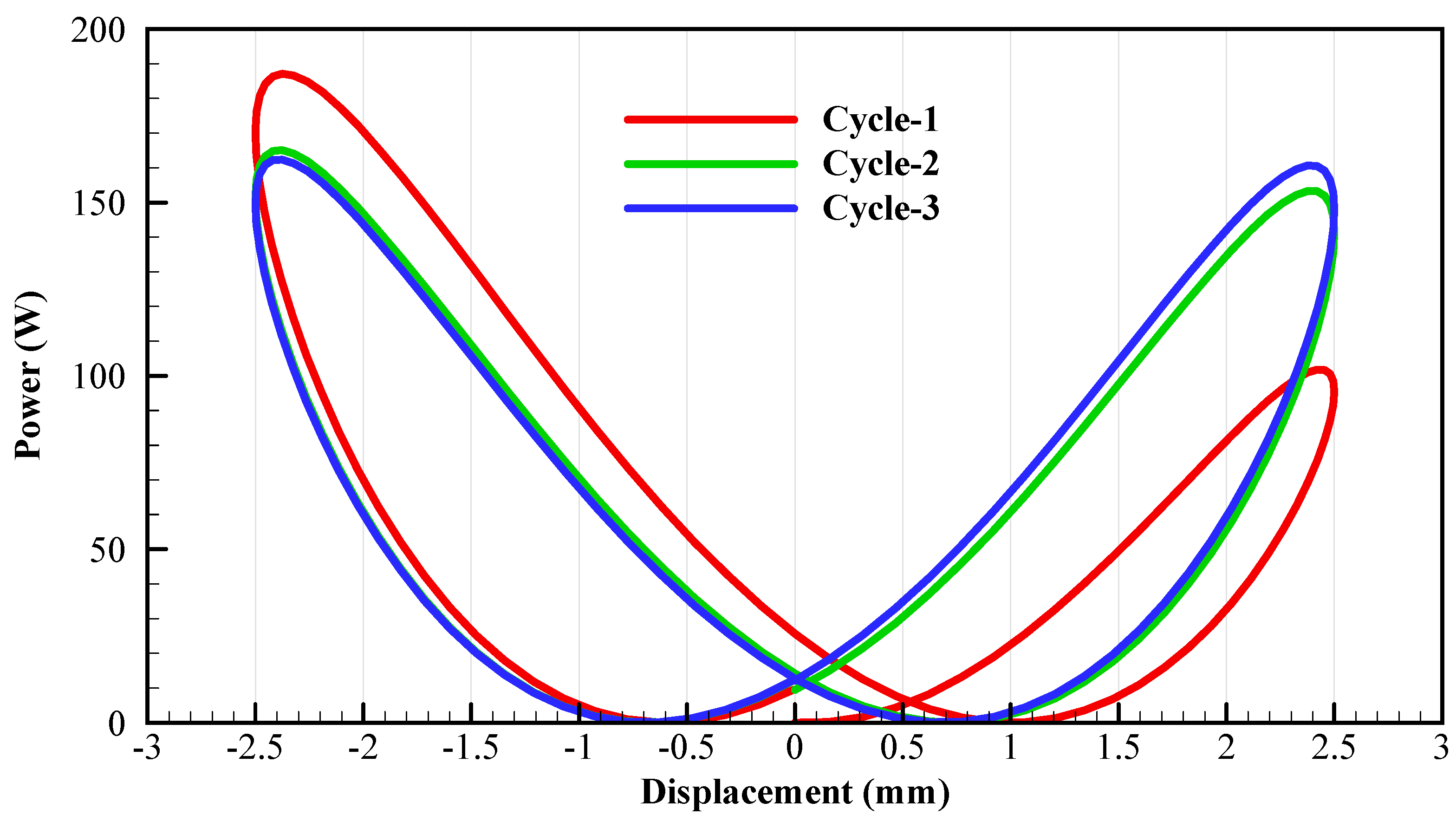
To reach the stable-operation state, the numerical model requires at least three cycles.
Figure 6 shows the transient evolution in the power-displacement phase space. The power associated with the last stable-operation cycle is 96.8 W for the baseline case.
Motion Condition
The three-dimensional magnetic transient analysis is carried out on JMAG for this study. The translator is moved based on the input assigned in the simulation. Displacement point sequencing is assigned to the translator for a smooth sequential movement. A sinusoidal displacement profile based on the frequency and stroke length is set on the z-axis on the translator. This profile is divided into one hundred equal steps and assigned to the translator. The induced voltage, power, and cogging forces are calculated with the motion variation over time.
4. Validation of Numerical Module
The numerical analysis is validated by comparing the simulated results for the same model proposed by Kim et al. [
11]. In Ref. [
11], the authors used a regenerative suspension system in vehicles that oscillate to 15 mm stroke at 10 Hz on average. Electronic suspension systems are employed to provide a change in the ergonomics of the vehicle and improve stability on different terrains. To harness the energy from oscillatory motion in the suspension, a linear alternator is replaced with the traditional damping system. The topology, structure, and magnet arrangement of Ref. [
11] are similar to the PMLA considered in this study. Therefore, the present numerical module is adopted to simulate the model of Ref. [
11], and hence the output power provided in Ref. [
11] can be taken as a comparative parameter to validate the present numerical module.
Table 4 shows the major specifications of the model. It is found that the two values of the maximum yield powers are in close agreement, and the relative difference is 0.4%. In addition,
Figure 7 conveys the dependence of the average power on the tooth thickness, and
Figure 8 shows the variations of power with time. The results of maximum yield powers from Ref. [
11] and the present analysis is plotted in
Figure 8 and are compared in
Table 4. In these two figures, comparisons between the present predictions and the data provided by Ref. [
11] are further made. Typically, a discrepancy of 0.5–0.7% rise in power is seen and a phase shift is observed from the present model. This is probably due to the change in the initial position of the translator and the difference in the software package. Nonetheless, the transient output power data are in close agreement.
5. Parametric Analysis
In this section, the parametric study is carried out with varying values of some influential parameters, such as the materials of the stator and the magnet, the operational frequency, and the stroke length around the baseline case. It is important to mention here that the present study is intended to modify the performance of the machine without changing its size. The change in the materials, frequency, or stroke length has no change in size. All simulation cases take at least ten cycles to get the stable-operation state. The SMC core generates negligible eddy-current losses, so this study does not consider this kind of loss. All following simulation cases are set up with an operating temperature of 60 °C.
5.1. Influence of Change in Stator Material
The electrical SMC core for the stator and shaft was made from China steel. The choice of material variation is a series of metals from 20, 35, and 50 based on the laminated steel thickness of 0.2 mm, 0.35 mm, and 0.5 mm. Each material varies with stacking factor ranging from 96 to 98%, it has a high influence on the induced emf and cogging forces on the translator.
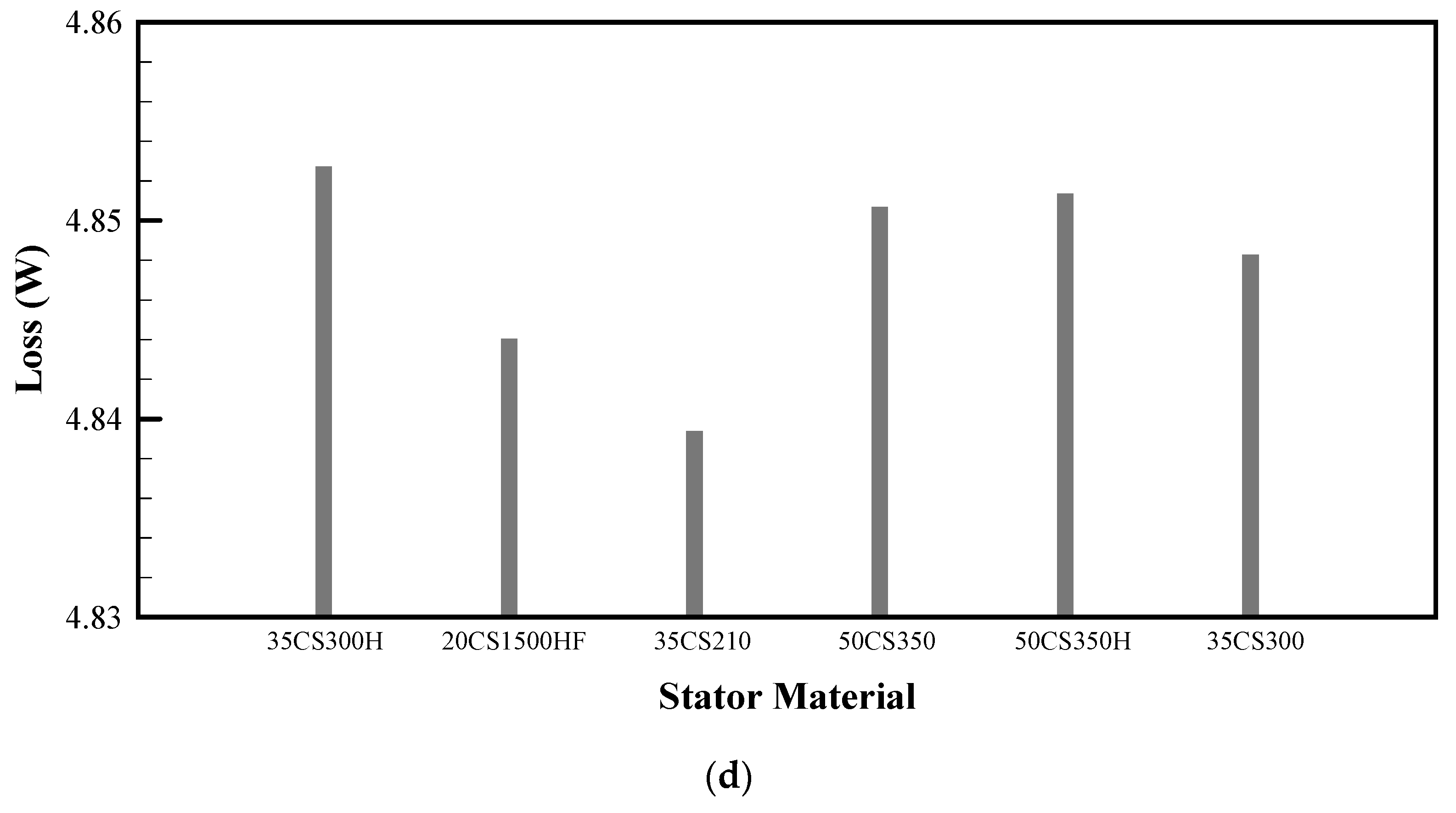
Figure 9a–d enumerate the influence of stator material on induced power, voltage, cogging force, and losses, respectively. The losses mentioned are joule and iron loss combined. The 50 series metal performs better in induced voltage and power compared to the baseline case material 35CS300. However, the cogging force and losses are equally higher and may not be preferable. 20CS1500HF performs better than the 35CS210 but not significant enough. The 35CS300H is a high magnetic flux density accommodating material and thus it is evident that it is better in comparison to the 35CS300 on all fronts and maintains a similar loss. P
l of 96 W and L of 4.85 W over 4.84 W from the baseline case for 35CS300H. The proportion of difference compared to the baseline case has been similar but incremental in all parameters.
5.2. Influence of Change in Magnet Material
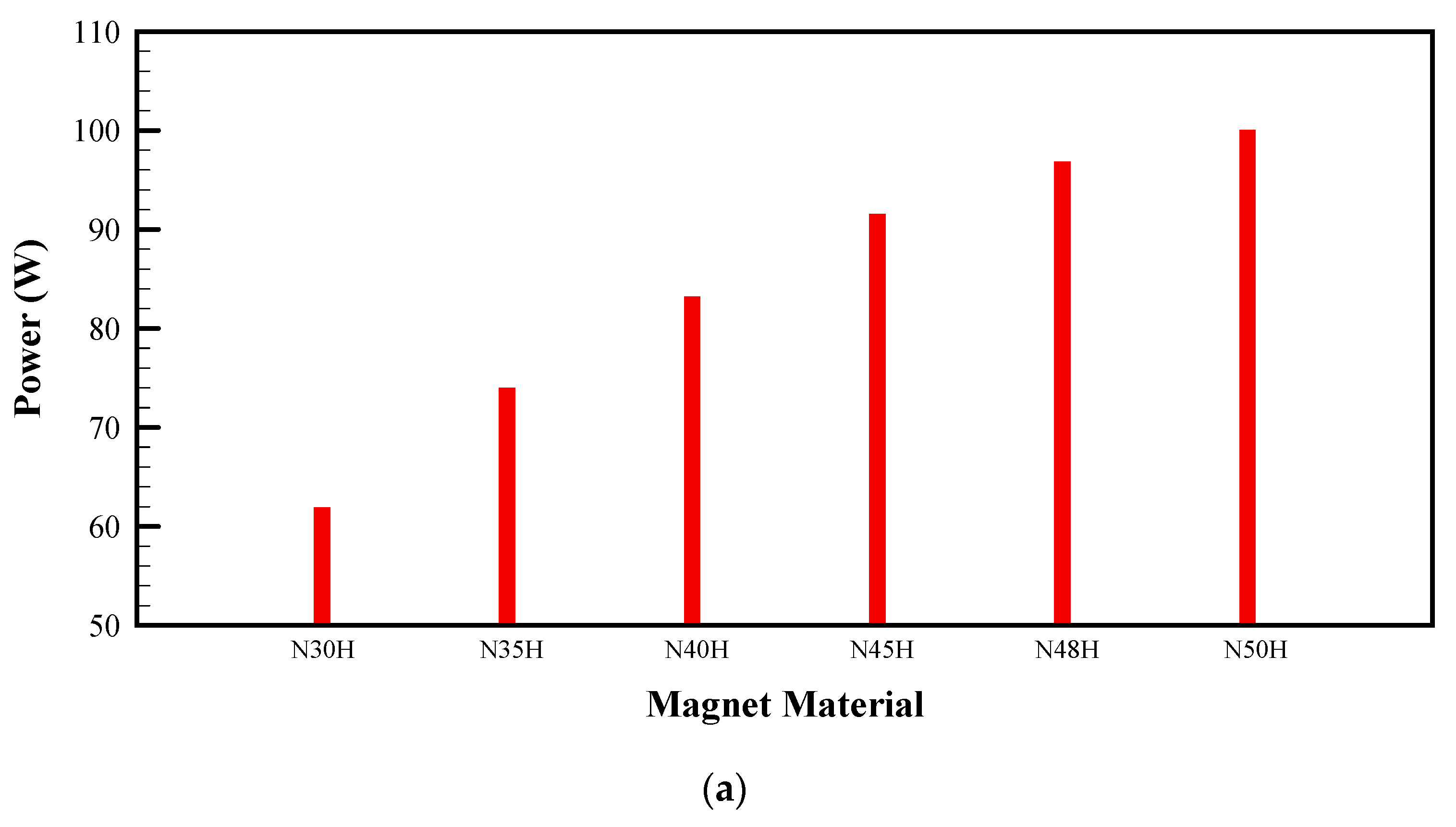
Neodymium-iron-boron magnets are the choice of permanent magnets for their high operable temperature and strong anti-demagnetization nature. The NXXH series of magnets N30H, N35H, N40H, N45H, N48H, and N50H are chosen for the magnetic material variation. The effect of change in magnet material has a significant and linear effect on the power. It is understood that maximum energy product increases the field and thus the induced emf in the coil.
Figure 10a–c illustrate the influence of change in magnet material on power, induced voltage, and cogging force, respectively. From N30H-N50H, the cogging force has increased marginally. The baseline case produced a reasonable 96.8 W of power and N50H produced the 100 W mark. However, this comparison clarifies the availability of choice for magnetic material depending on the requirement of the application. To find a balance between power and cogging force, the baseline case is reasonable for the developed application.
5.3. Influence of Change in Frequency
Though PMLAs can be operated at higher frequencies, the application developed ranges from 30 to 60 Hz, and this is variable based on the stiffness factor and cogging force experienced on the translator. Taiwan electrical appliances operate at 60 Hz and a reasonable value to have it as the baseline case. It is split from 10 to 100 Hz, split in multiples of 10.
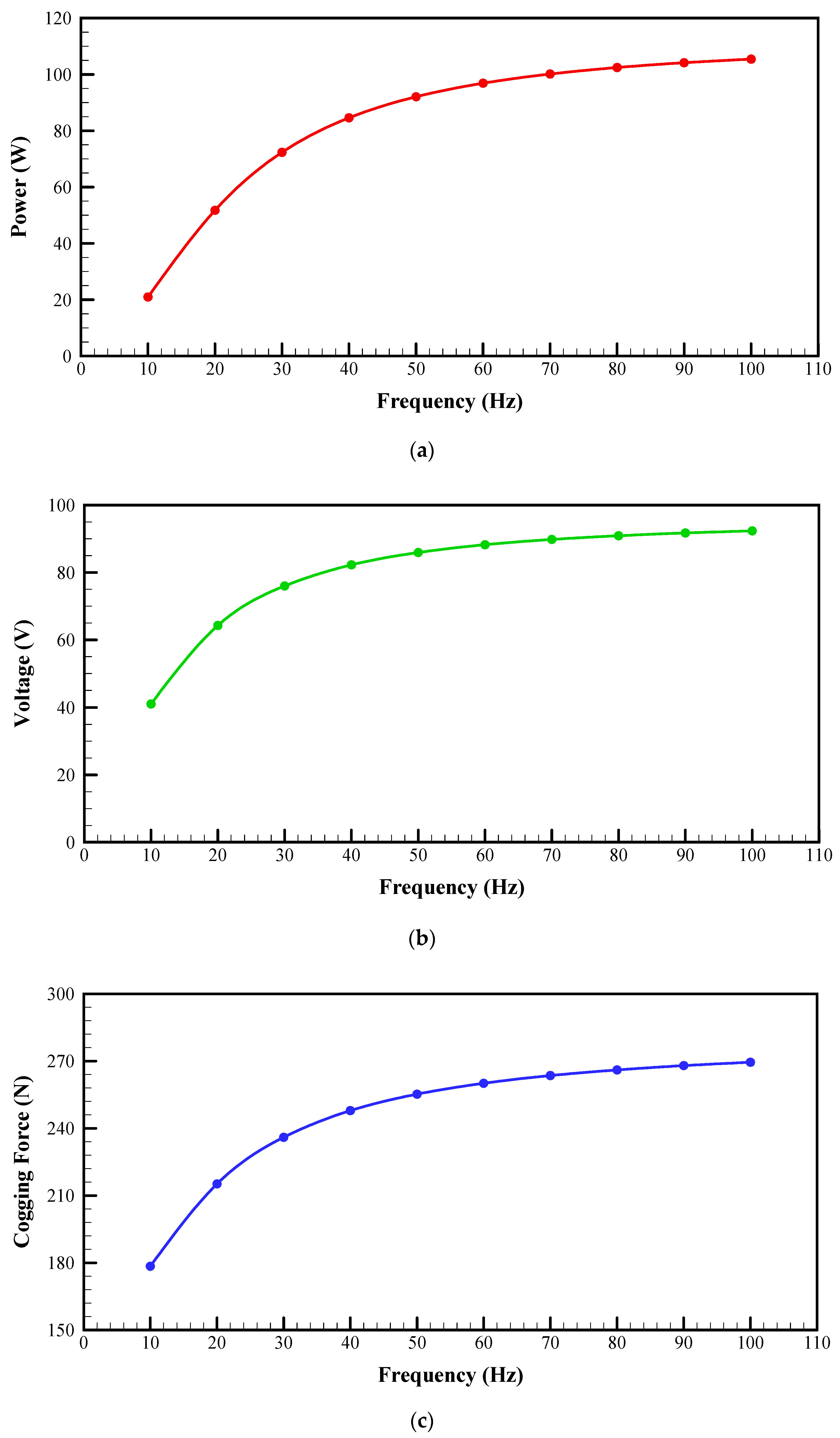
Figure 11a–c show the effects of frequency over the output parameters power, voltage, and cogging force, respectively. The voltage and cogging force have a similar profile and they are closely comparable to each other. It can be observed that the power curve can be split into three phases, the 10–30, 30–60, and 60–100 Hz. The first phase has a significant climb from 10 to 30 Hz with 20.9 W to 72.3 W, the second phase from 30 to 60 Hz there a saturation with 72.3 W to 96.8 W, and from 60 to 100 Hz the saturation is cleaner from 96.8 W to 105.4 W. Though the baseline case is close to the required power, the choice and operable conditions of the application is independent. The maximum cogging force of 269.5 N is observed at 100 Hz which is few more than 260.1 N for the baseline case.
5.4. Influence of Change on Stroke Length
The most influential variation in the performance of PMLA is the stroke length. The stroke length is proportional to the induced emf, as mentioned in Equation (1). The average stroke length of the application varies from 3 to 6 mm. Hence, the reasonable 5 mm stroke is taken for the baseline case, and for the variation analysis, the range is from 2.5 to 25 mm with a 2.5 mm step incremental size. The inference can be observed in
Figure 12a–c showing the power, voltage, and cogging force curves, respectively.
The cogging force can be split into two phases: the phase from 2.5 to 7.5 mm and 7.5 to 25 mm. The cogging force climbs linearly in the first phase and approaches saturation in the second. The maximum limitation of the machine variation is extended by 20 mm more than the baseline case. The analysis cannot exceed the 25 mm mark due to the design limitations of the machine. A maximum usable power of 921 W was obtained at peak stroke bringing the power density to 186.4 W/kg.
5.5. Effects of Slotting
The tubular topology PMLA with the stator housing the coil has been a conventional design choice. However, a slot-space is introduced to reduce the overall mass of the stator and in turn, increase the power density of the PMLA. The motivation of the study is to improve the performance of the machine and to understand the performance limitations of the machine without changing any dimension of the designed PMLA. However, this section of the study is to understand the correct dimension of slot-spacing of this PMLA to obtain peak performance. The baseline case and parametric analysis of the aforementioned variations had fixed Ts at 5 mm. The introduction of a slot-space in a tubular topology PMLA has its effects on the performance of the machine. To understand the effects of slot-space, an analysis is carried out by varying Ss and in turn changing Ts. Thus, the slot-spacing varies from 3 mm to 6 mm in multiples of 0.5 mm. The tooth wall is adjusted in such a way that the overall stack length Sl, slot width Sw, and tooth width Tw are maintained constant to achieve this slot-space variation. The case below 3 mm slot-spacing is too small and beyond 6 mm is impractical to maintain constant slot width. The analysis for effects of change in slot-spacing is done by maintaining all aspects of the baseline case from material choice, operating conditions, and meshing.
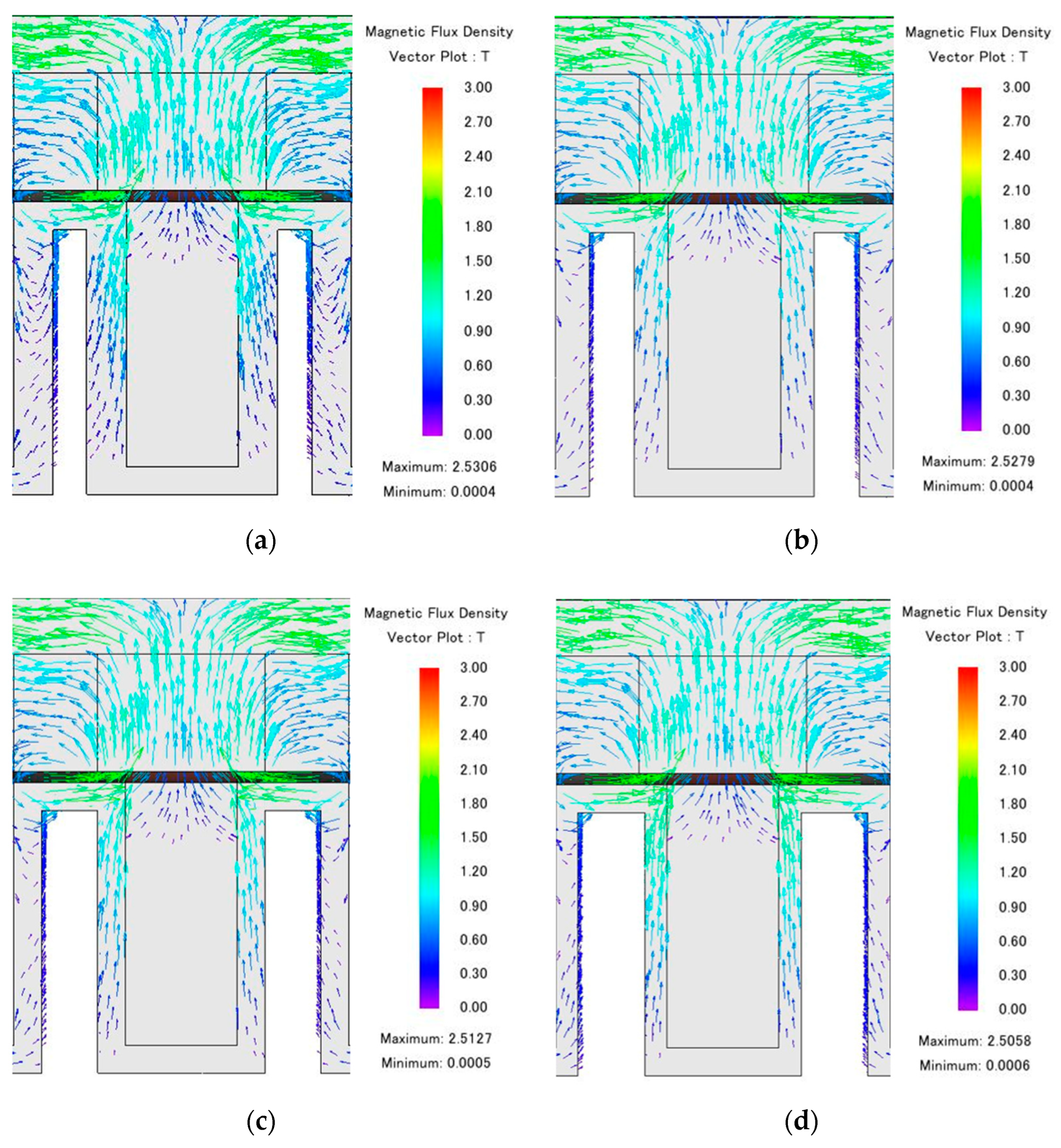
Figure 13 shows the magnetic flux distribution on the center tooth of the stator for cases 3 mm, 4 mm, 5 mm, and 6 mm. It can be observed that the flow of flux lines on the tooth wall in
Figure 13a is stronger than
Figure 13d. The free flow of flux lines has a direct impact on the induced power. With lower slot-spacing comes more stator mass. The influence of change in slot-space width over induced power and change in stator mass can be observed in
Figure 14. The correlation of the stator mass and induced power mean an influence on power density. The influence of slot-spacing on the power density of the PMLA for the baseline case can be observed in
Figure 15. The 20 W/kg mark is an acceptable power density for this PMLA. Hence, the slot-spacing between 5 mm and 6 mm can be chosen based on practicality in the manufacturing aspect. However, 5 mm slot-spacing is maintained for this study.
5.6. Modified Design
The numerical analysis of this model is made without changing any geometrical parameters or altering the topology of the machine. The variation in frequency, stroke, magnet, and stator material yielded a finite conclusion.
Table 3 illustrated the baseline case considered for the variation with 60 Hz, 5 mm, 35CS300, and N48H. These baseline cases were from a thorough knowledge of previous iterations of the PMLA development. After the numerical analysis, the study illustrated significant changes in the preliminary consideration. Regarding the stator material, 35CS300H proved to be better by maintaining the same cogging force and increased output power. The N50H magnet providing more power produced more cogging force and the baseline case N48H provided required power with lower cogging force. Hence, the N48H magnet is preferred over the N50H. Regarding the stroke length, 7.5 mm had a significant rise in output power with similar cogging force levels. The frequency and magnet material remain unchanged for the condition from the baseline case.
Table 5 shows the modified parametric design for the slot-spaced PMLA. The magnetic flux density distribution on the modified PMLA is shown in
Figure 16. With modified design conditions, the PMLA developed 208 W power and 129.5 V load voltage with 329.8 N cogging force.
6. Discussion
The parametric choices yielded a predictable performance for the PMLA. The Special application materials such as 35CS300H and 50CS350H were performing better than 35CS300 and 50CS350 because of the high magnetic flux induction property of the choice of materials. As the name denotes, the iron loss property of the other materials was significantly higher than the 35 series metals. Due to the stacking factor variation between 20 and 50 series metals, the 35 series metal stood out to be a standalone choice balancing the output power, cogging force, and iron loss. The performance variation from the change in magnetic material is a straightforward understanding that the magnetic flux density is varied linearly based on the magnetic remanence of the magnets and thus the reflection in output power and cogging force. Change in frequency produces a constant performance variation over all-important output parameters. The segmentation of the performance is due to the transient response of the magnetic flux induction in the coil. This variation drops beyond the 60 Hz range. There reaches a saturation point and a near impossibility of the operatable condition for these machines. The stroke length performance of the PMLA is a straightforward reflection from Equation (1). The induced emf is proportional to the change in position of the translator. Hence, the induced power, and the cogging force are proportional to the stroke length of the translator. The limitation of the stroke length is due to the design of the PMLA.
The effects of slotting shown in
Figure 14 and
Figure 15 show significant importance of the tooth space. With larger slotting space, the wall of the stator becomes thinner, and the flow of magnetic flux is getting shortened and congested. Due to the congestion of flux, the emf induced in the coil becomes significantly lower and thus induced power. An unslotted model would produce higher power with more overall mass. This study intends to make a PMLA with a higher power density in its class. The fundamental requirement of developing this PMLA is to obtain a few hundred watts of power from the source it’s designed. The validation of our model is made in comparison with the Ref. [
11] model due to the similarity in topology, output power, stroke length, and magnet arrangement. Although the application of both models may differ, the aforementioned properties of both models are in close agreement with each other. Hence, the performance and design parameters of both machines are compared in
Table 6. The Ref. [
11] is 59% longer in stack length, and 312% heavier than the modified model. Though being bigger and longer, the modified model has a significant advantage over the performance of the Ref. [
11] model. It has 32% more peak power and 78% more power density in the highest operable condition over Ref. [
11] model. Similarly, the model from Ref. [
7] is similar to the modified model. However, the thrust force induced on the translator is ten times more in comparison with the modified model. Additionally, the model from Ref. [
31] consisting of a similar size to the modified model operating at 67 Hz with a stroke length of 22 mm can produce a maximum power of 300 W. The merits of the Halbach array are not used to obtain more performance out of this machine. Thus, the modified model is better in all aspects of performance in comparison with three similar linear alternators mentioned above working under similar operating conditions.
7. Conclusions
A slot space is introduced between the stator-tooth to reduce the overall mass of the PMLA and improve the power density of the machine. The developed model is parametrically analyzed for four important variable parameters without a change in model geometry. A baseline case is fixed to run in open and closed-loop conditions to obtain the output power of the machine.
In the case of the parametric variation, the closed-loop condition is adopted to obtain the induced power and losses. The stator material 35CS300H is better than the baseline case 35CS300 concerning power, cogging force, and induced voltage keeping the losses at the same level. The N48H magnet is a preferable candidate for the magnet material and has a similar profile to other magnet materials. The baseline case is an acceptable region for the frequency of operation. A saturation is observed after 60 Hz and the domestic application is limited to this frequency in most countries, and the requirement of a driver circuit is obsolete. The stroke length is a proportional parameter where the performance continues to rise with the rise in stroke length. The design limitations and operable conditions are the limiting factors for the performance analysis in stroke length. However, a stroke length above 7.5 mm is not advisable because of a change in output voltage profile. The best performance of the machine can be obtained at 60 Hz and 7.5 mm to keep a balance between power and cogging force with material choices 35CS300H and N48H for the stator and magnet materials, respectively. The slot-spacing study reassures that 5 mm Ts is best suited and unchanged. This PMLA can produce 921 W in extreme operating conditions with 186.4 W/kg of power density. The flexibility of the operating parameters would yield any power within the range aforementioned. Since the presented model is validated in comparison to a proven model, there is a significant performance difference from conventional models.
The machine is designed in such a manner that the operating conditions can be varied based on the power requirement. However, modularity in the change of material is applicable only for the magnet material after production. Additionally, the cogging force profile is most likely expected to maintain the same profile as the displacement to avoid abnormal vibrations on the translator. Keeping these key points, the future development of this study will concentrate on cogging force reduction, maintaining a sinusoidal cogging force profile, and modularity of the PMLA.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}