
Multi-Objective Optimization Design of a Stator Coreless Multidisc Axial Flux Permanent Magnet Motor



Abstract
:1. Introduction
2. Structure and Multi-Objective Optimization Approach
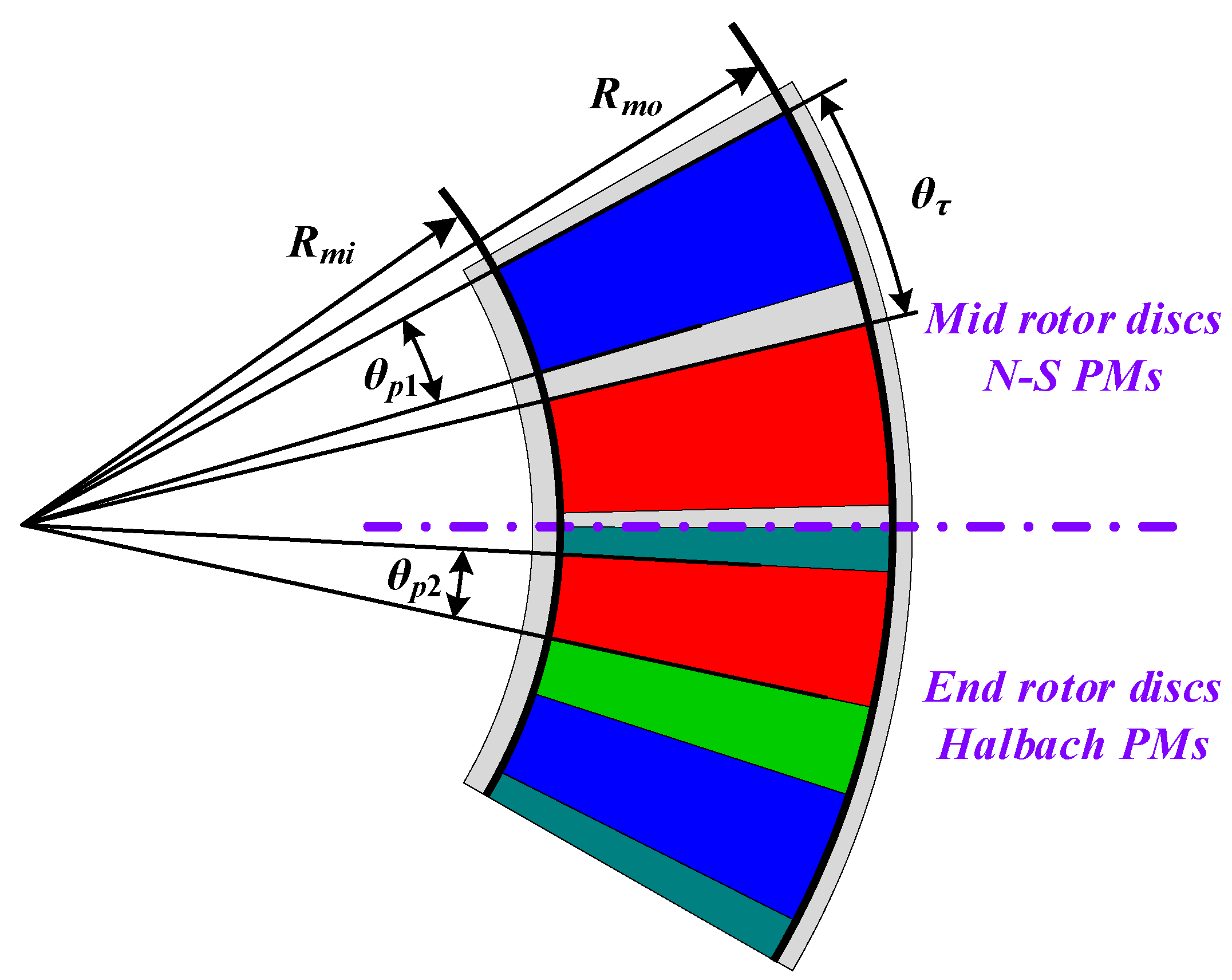
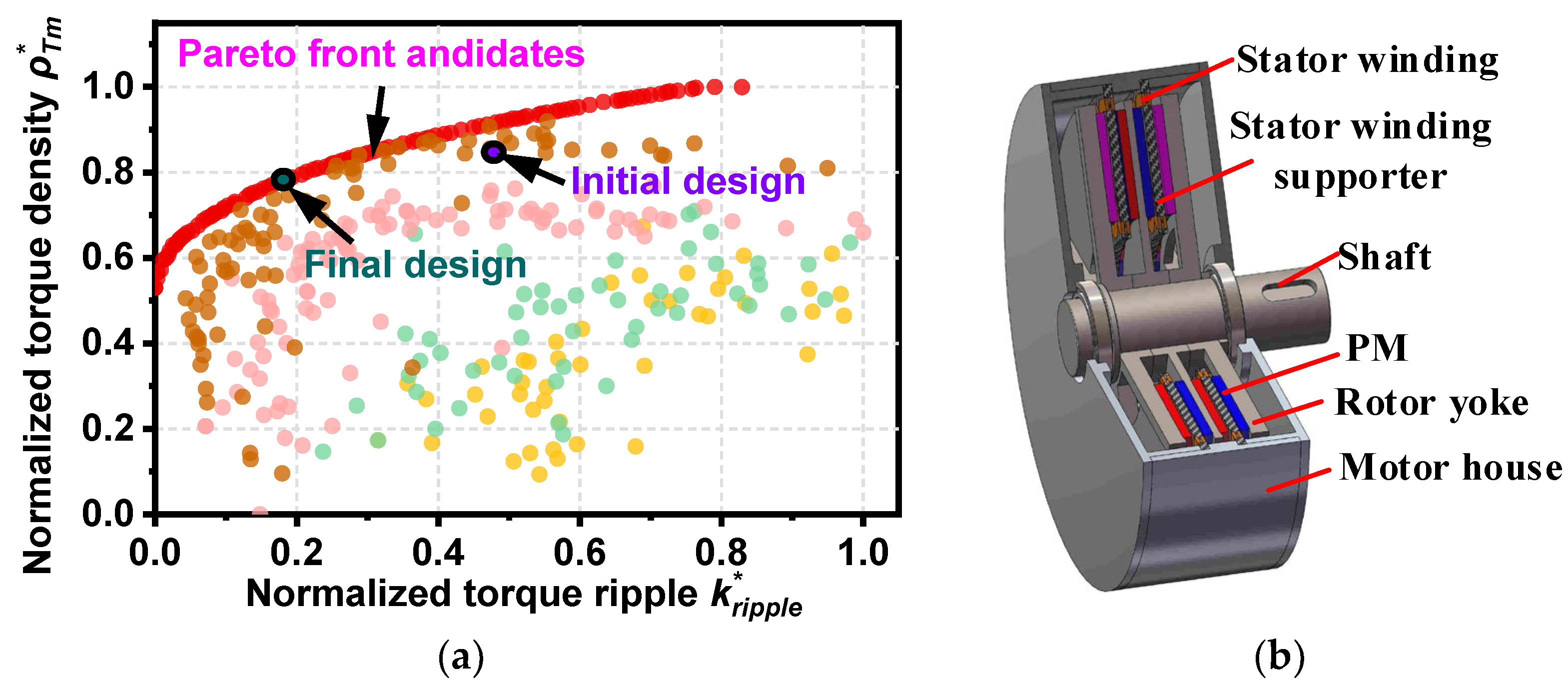
2.1. Structure of the SCM-AFPM Motor
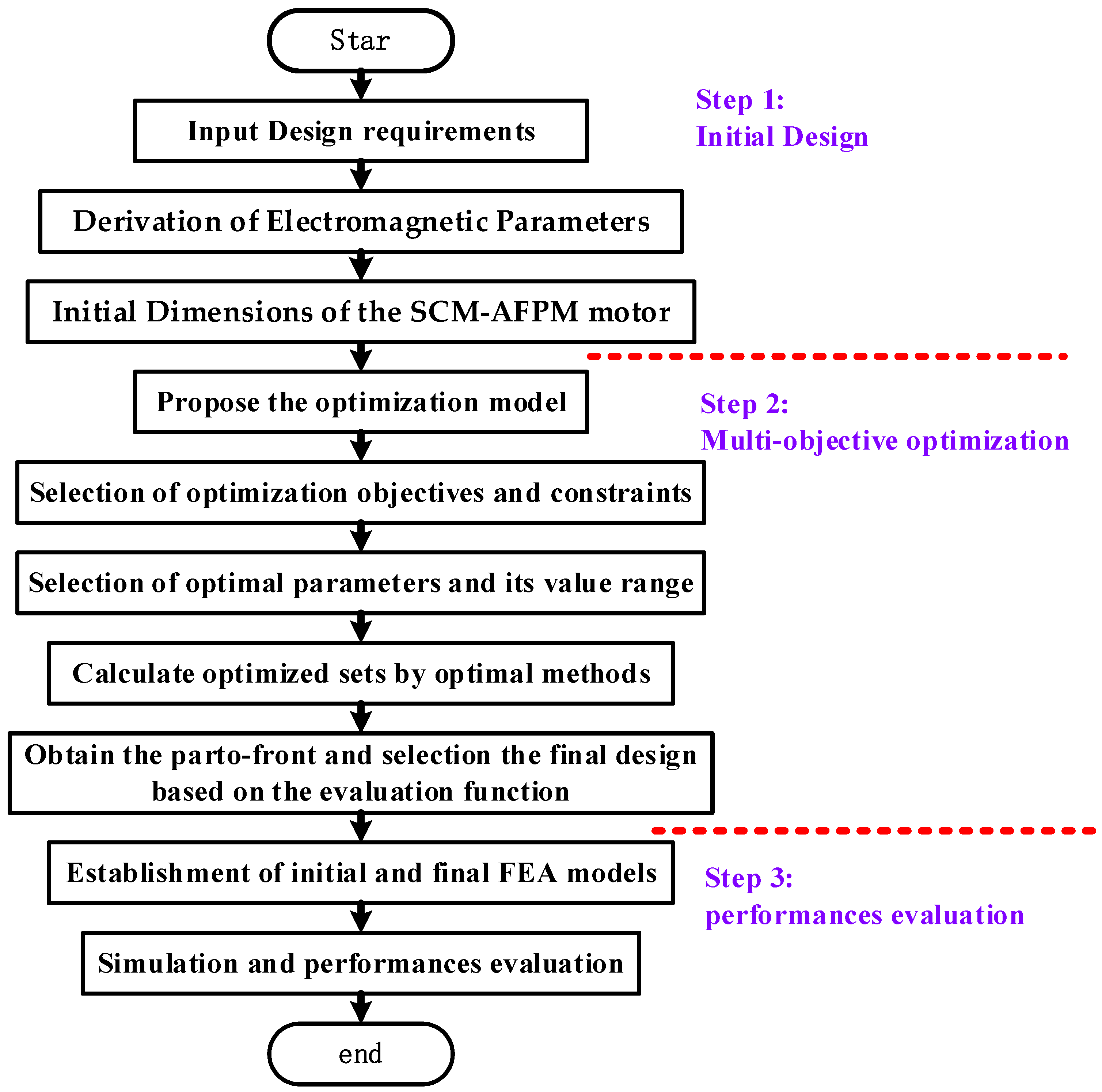
2.2. Multi-Objective Optimization Approach of the SCM-AFPM Motor
- Step1:
- Initial design of the SCM-AFPM motor.
- Step2:
- Multi-objective optimization of the SCM-AFPM motor.
- Step3:
- Performances evaluation.
3. Initial Design of the SCM-AFPM Motor
3.1. Electromagnetic Torque of the SCM-AFPM Motor
3.2. Initial Dimensions of the SCM-AFPM Motor
4. Multi-Objective Optimization Design of the SCM-AFPM Motor
4.1. Multi-Objective Optimization Model
4.1.1. Optimal Parameters
4.1.2. Optimization Objectives and Constraints
4.2. The Multi-Objective Optimization and Final Design
5. Performance Analysis
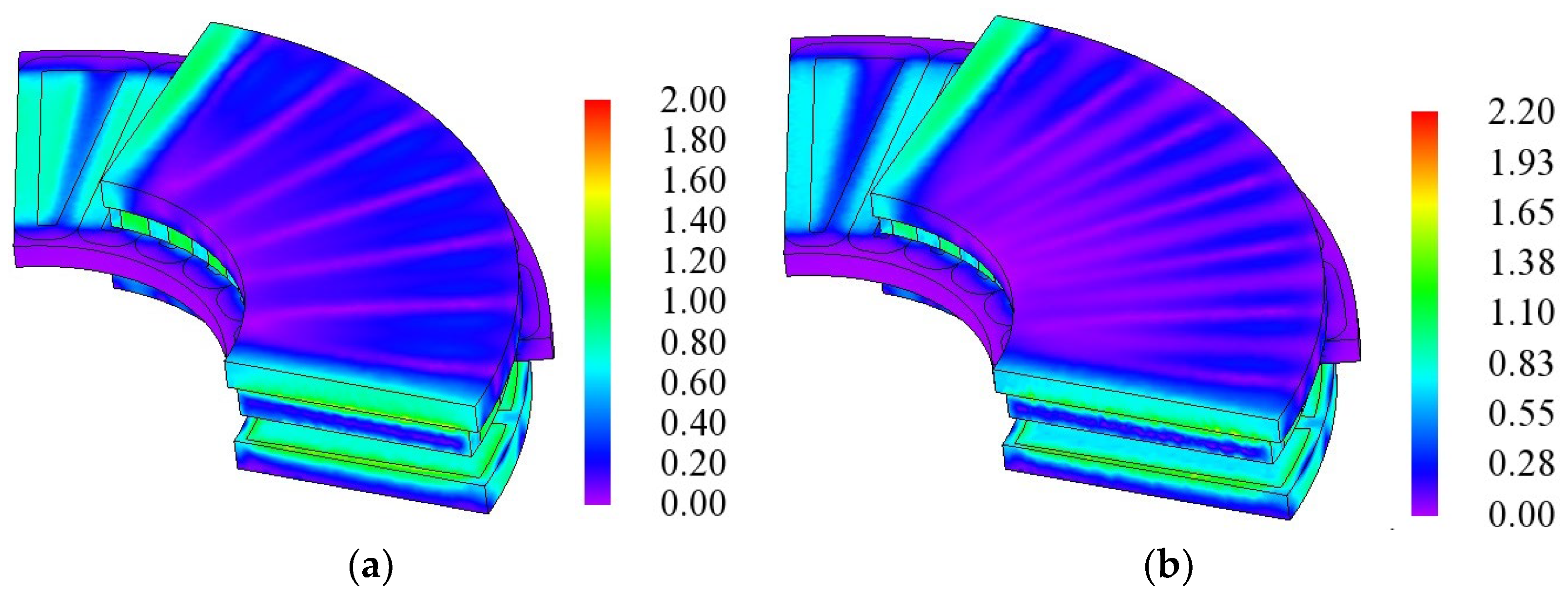
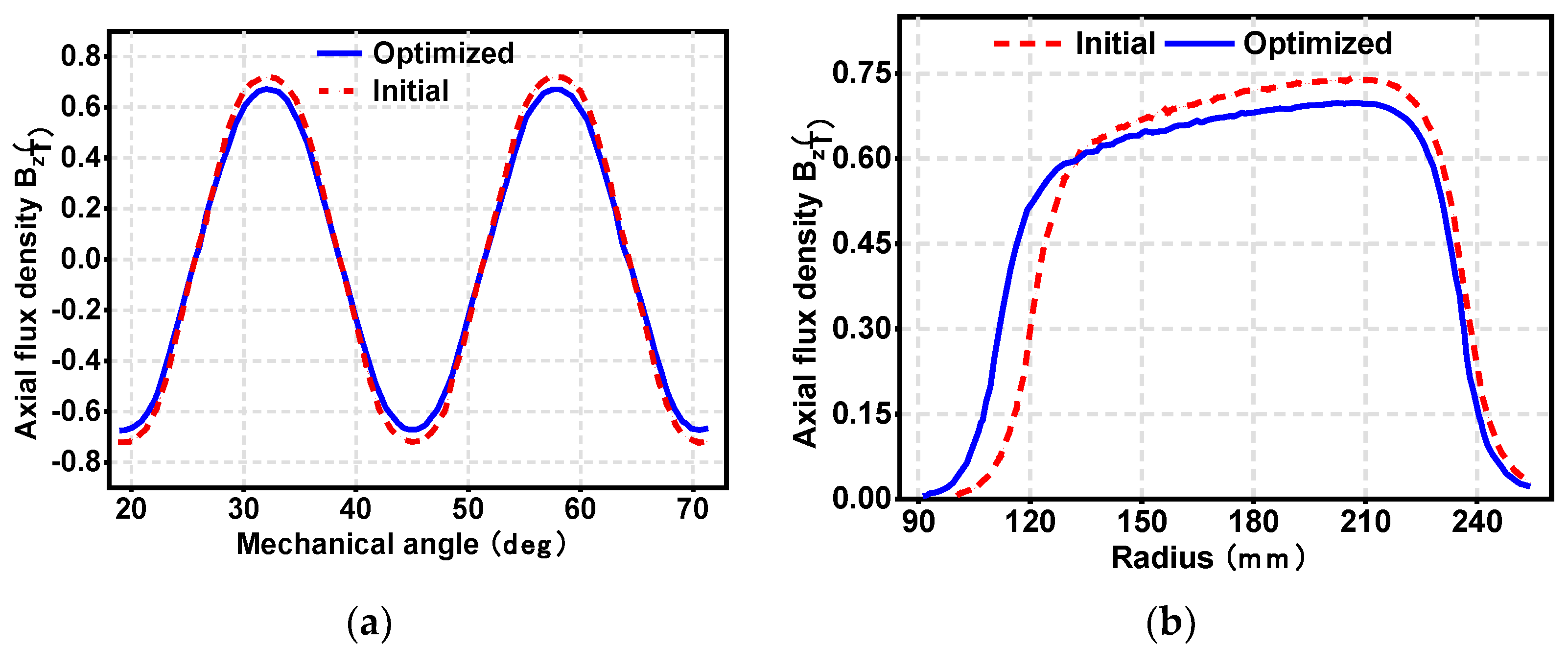
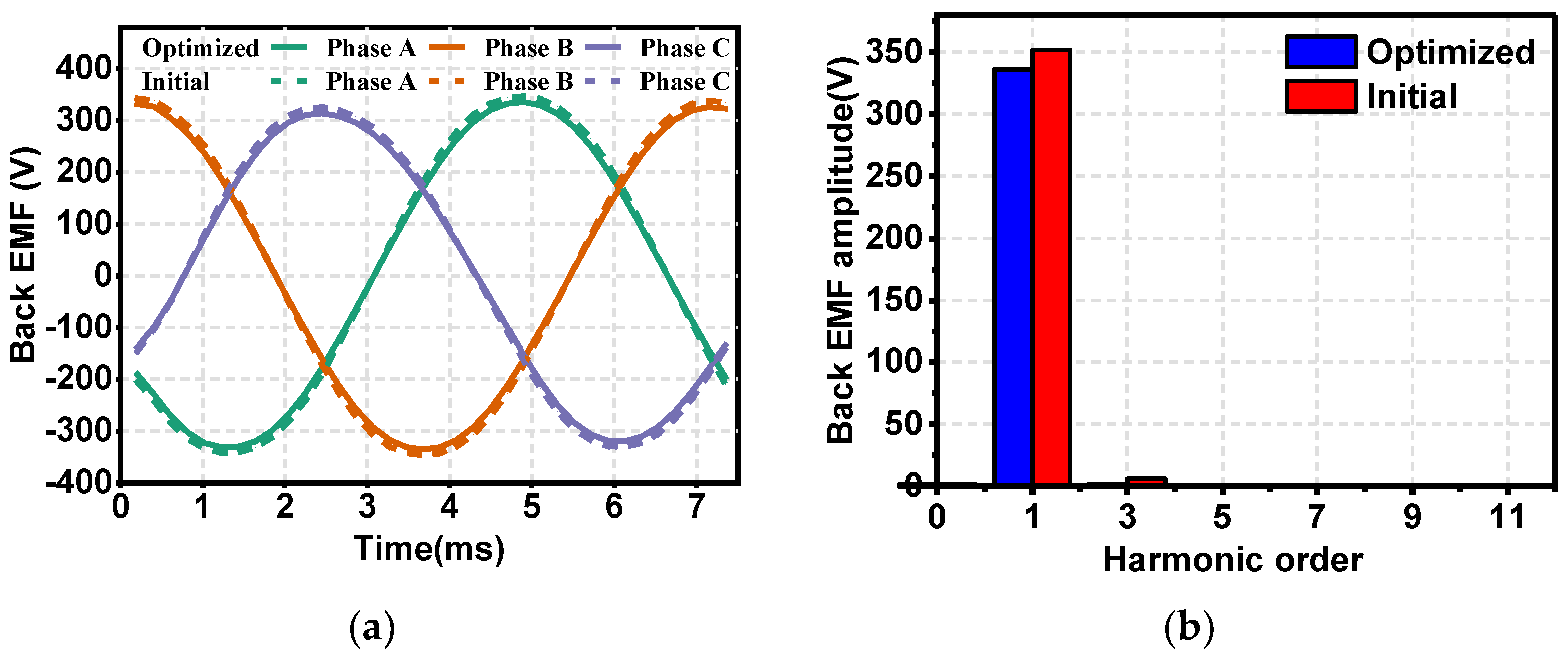
5.1. Flux Density and No-Load Back-EMF
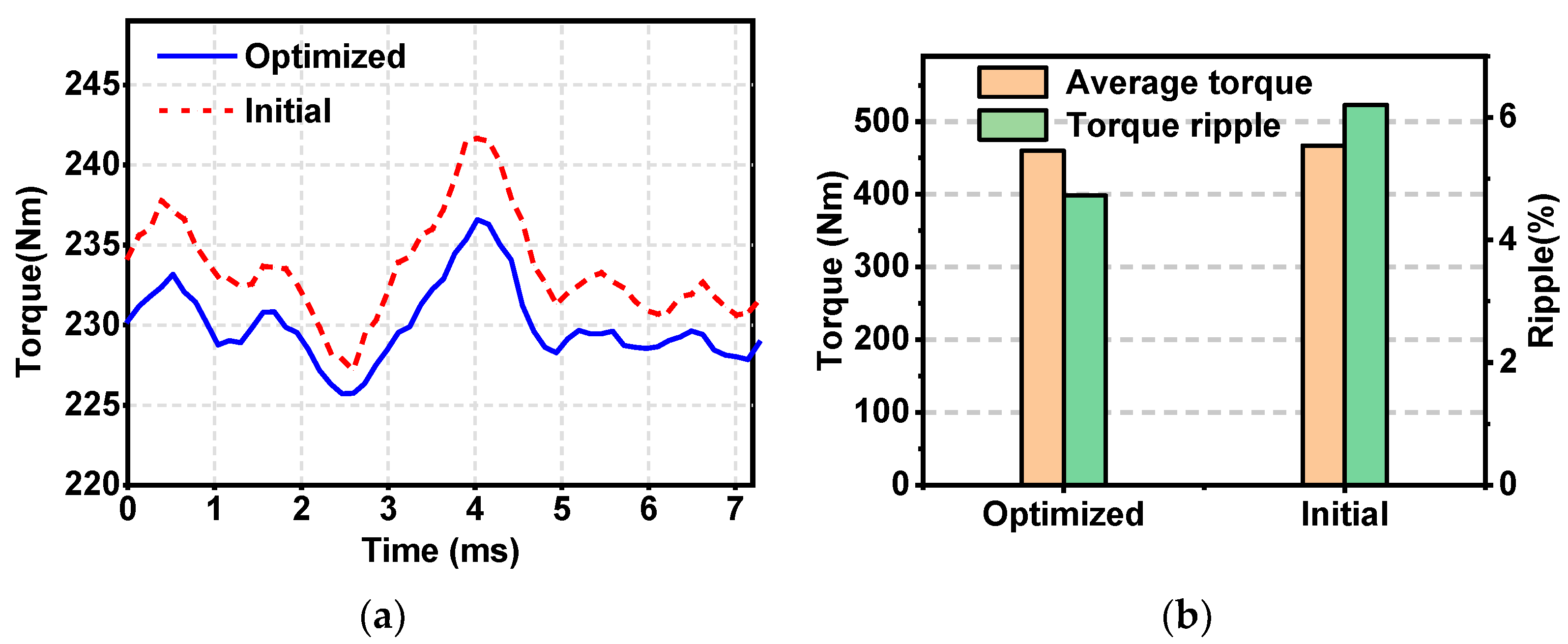
5.2. Electromagnetic Torque
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, S.; Zhou, J.; Zhang, X.; Yu, J. Design and Research on High Power Density Motor of Integrated Motor Drive System for Electric Vehicles. Energies 2022, 15, 3542. [Google Scholar] [CrossRef]
- Xie, Y.; Xia, Y.; Li, Z.; Li, F. Analysis of Modal and Vibration Reduction of an Interior Permanent Magnet Synchronous Motor. Energies 2019, 12, 3427. [Google Scholar] [CrossRef] [Green Version]
- Dayo, Z.A.; Cao, Q.; Wang, Y.; Pirbhulal, S.; Sodhro, A.H. A Compact High-Gain Coplanar Waveguide-Fed Antenna for Military RADAR Applications. Int. J. Antennas Propag. 2020, 2020, 8024101. [Google Scholar] [CrossRef]
- Zhao, X.; Kou, B.; Zhang, L.; Zhang, H. Design and Analysis of Permanent Magnets in a Negative-Salient Permanent Magnet Synchronous Motor. IEEE Access 2020, 8, 182249–182259. [Google Scholar] [CrossRef]
- Aydin, M.; Gulec, M.; Demir, Y.; Akyuz, B.; Yolacan, E. Design and validation of a 24-pole coreless axial flux permanent magnet motor for a solar powered vehicle. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2016; pp. 1493–1498. [Google Scholar]
- Taran, N.; Rallabandi, V.; Heins, G.; Ionel, D.M. A comparative study of conventional and coreless axial flux permanent magnet synchronous motors for solar cars. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2017; pp. 1–7. [Google Scholar]
- Qi, H.; Ling, L.; Liwei, Z. Design and Research of Axial Flux Permanent Magnet Motor for Electric Vehicle. In Proceedings of the 2019 IEEE 3rd International Electrical and Energy Conference (CIEEC), Beijing, China, 7–9 September 2019; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2019; pp. 1918–1923. [Google Scholar]
- Wang, S.; Zhao, J.; Liu, T.; Hua, M. Adaptive Robust Control System for Axial Flux Permanent Magnet Synchronous Motor of Electric Medium Bus Based on Torque Optimal Distribution Method. Energies 2019, 12, 4681. [Google Scholar] [CrossRef] [Green Version]
- Geng, W.; Zhang, Z.; Li, Q. High Torque Density Fractional-Slot Concentrated-Winding Axial-Flux Permanent-Magnet Machine with Modular SMC Stator. IEEE Trans. Ind. Appl. 2020, 56, 3691–3699. [Google Scholar]
- Hajnrych, S.J.; Jakubowski, R.; Szczypior, J. Yokeless Axial Flux Surface-Mounted Permanent Magnets Machine Rotor Parameters Influence on Torque and Back-Emf. Energies 2020, 13, 3418. [Google Scholar] [CrossRef]
- Dini, P.; Saponara, S. Cogging Torque Reduction in Brushless Motors by a Nonlinear Control Technique. Energies 2019, 12, 2224. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Li, G.; Cao, W.; Qian, Z.; Wang, Q. Winding MMF and PM MMF Analysis of Axial-Flux Machine with Multi-Phase and Multi-Layer Winding. Energies 2021, 14, 5147. [Google Scholar] [CrossRef]
- Credo, A.; Tursini, M.; Villani, M.; Di Lodovico, C.; Orlando, M.; Frattari, F. Axial Flux PM In-Wheel Motor for Electric Vehicles: 3D Multiphysics Analysis. Energies 2021, 14, 2107. [Google Scholar] [CrossRef]
- Lawhorn, D.; Han, P.; Lewis, D.; Chulaee, Y.; Ionel, D.M. On the Design of Coreless Permanent Magnet Machines for Electric Aircraft Propulsion. In Proceedings of the 2021 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 15–17 June 2021; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2021; pp. 278–283. [Google Scholar]
- Liu, Y.; Zhang, Z.; Wang, C.; Geng, W.; Yang, T. Design and Analysis of Oil-Immersed Cooling Stator with Nonoverlapping Concentrated Winding for High-Power Ironless Stator Axial-Flux Permanent Magnet Machines. IEEE Trans. Ind. Electron. 2021, 68, 2876–2886. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, C.; Geng, W. Design and Optimization of Halbach-Array PM Rotor for High-Speed Axial-Flux Permanent Magnet Machine with Ironless Stator. IEEE Trans. Ind. Electron. 2020, 67, 7269–7279. [Google Scholar] [CrossRef]
- Grenier, J.-M.; Pérez, R.; Picard, M.; Cros, J. Magnetic FEA Direct Optimization of High-Power Density, Halbach Array Permanent Magnet Electric Motors. Energies 2021, 14, 5939. [Google Scholar] [CrossRef]
- Li, H.; Cui, L.; Ma, Z.; Li, B. Multi-Objective Optimization of the Halbach Array Permanent Magnet Spherical Motor Based on Support Vector Machine. Energies 2020, 13, 5704. [Google Scholar] [CrossRef]
- Wang, S.-C.; Nien, Y.-C.; Huang, S.-M. Multi-Objective Optimization Design and Analysis of V-Shape Permanent Magnet Synchronous Motor. Energies 2022, 15, 3496. [Google Scholar] [CrossRef]
- Zhao, X.; Kou, B.; Huang, C.; Zhang, L. Optimization Design and Performance Analysis of a Reverse-Salient Permanent Magnet Synchronous Motor. Machines 2022, 10, 204. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Rated speed nN (rpm) | 600 |
| Number of turns per coil N | 12 |
| Number of parallel circuits a | 2 |
| Number of winding layers | 2 |
| Number of stator modules ms | 2 |
| Number of motor pole pairs p | 14 |
| Number of coils per stator module Q | 24 |
| The inner radius of the PMs Rmi (mm) | 119 |
| Armature radius ratio λ | 2 |
| Length of PMs magnetization direction hm (mm) | 15 |
| Polar arc coefficient of N-S PMs α1 | 0.8 |
| Polar arc coefficient of Halbach PMs α2 | 0.57 |
| Air gap on one side g (mm) | 2 |
| The axial length of stator module hs (mm) | 12 |
| Axial thickness of a coil hcoil (mm) | 4 |
| Phase number m | 3 |
| Parameters | Value |
|---|---|
| The inner radius of the PMs Rmi (mm) | 110 |
| Armature radius ratio λ | 2.15 |
| Length of PMs magnetization direction hm (mm) | 12.5 |
| Polar arc coefficient of N-S PMs α1 | 0.825 |
| Polar arc coefficient of Halbach PMs α2 | 0.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.; Kou, B.; Zhao, X.; Niu, X.; Zhang, L. Multi-Objective Optimization Design of a Stator Coreless Multidisc Axial Flux Permanent Magnet Motor. Energies 2022, 15, 4810. https://doi.org/10.3390/en15134810
Huang C, Kou B, Zhao X, Niu X, Zhang L. Multi-Objective Optimization Design of a Stator Coreless Multidisc Axial Flux Permanent Magnet Motor. Energies. 2022; 15(13):4810. https://doi.org/10.3390/en15134810
Chicago/Turabian StyleHuang, Changchuang, Baoquan Kou, Xiaokun Zhao, Xu Niu, and Lu Zhang. 2022. "Multi-Objective Optimization Design of a Stator Coreless Multidisc Axial Flux Permanent Magnet Motor" Energies 15, no. 13: 4810. https://doi.org/10.3390/en15134810