1. Introduction
In the last decades, due to the massive consumption of nonrenewable energy resources and the noticeable increase in the transportation sector, the environment has been suffering from a rapid increase in greenhouse gas (GHG) emissions [
1]. At the time of publishing, transportation makes up 27% of GHGs in Canada [
2] and 27% in the USA [
3]. Electric vehicles (EVs) have become increasingly popular in recent years due to their higher efficiencies and lower GHG emissions [
4]. However, a massive integration of EVs into the power system will increase the total demand for electricity and create many concerns and challenges for the distribution system operation [
5].
Designing an EV charging model will help in the development and improvement of the power system operation and in preparing for EV penetration [
6]. Grid operators need to prepare for high-level EV penetration to the power system. The EV charging model gives the operator an overview of the effect of integrating EVs on a distribution network, to identify and prevent overloading problems due to uncontrolled charging. Uncontrolled EV charging can be responsible for various problems, such as voltage deviation, transformers overloading, electricity losses, and power system instability [
7]. In this regard, appropriate modeling of a residential EV charging profile is the main goal of this paper, which is considered essential work for distribution system development.
Modeling residential EV charging can be used in many studies, such as load flow analysis, optimal power flow, demand response, energy management, power system stability, power system protection, frequency regulation, and household electric consumption management [
8,
9,
10,
11,
12,
13].
To model the residential EV charging profile, there are many parameters to be considered, such as daily energy consumption, driving period, start charging times, charging power levels, EV battery capacity, initial state of charge (
), and final state of charge (SOC). The patterns of these parameters can be modeled by analyzing the historical actual data and selecting the most appropriate statistical methods that have the ability to model these parameters with the same distribution shapes. Probabilistic density functions (PDFs) are important methods used to identify the distribution of data, such as gamma distribution, beta distribution, uniform distribution, Gaussian distribution, Burr distribution, Gaussian mixture distribution, and others [
14,
15,
16,
17]. However, sometimes PDF methods cannot fit the distributions of the actual parameters. The inverse transformation method can be used to generate random numbers from any probability distribution variable [
18,
19]. The distribution of each parameter can be used to develop individual and aggregated EV charging models.
Bottom-up models have been used in [
20,
21,
22] to model the EV charging profiles where individual EV charging is modeled first and then the aggregated profile. The input parameters for the individual EV charging model can be simulated based on the EV driver’s behavior information. This information can be modeled from national resources’ travel surveys or from real statistical data (e.g., [
23], or [
24]).
In [
25], the authors designed an EV charging model, considering the EV driver’s behavior. The model was designed based on a real EV charging dataset, which was obtained from the North American campus network. A Monte Carlo simulation was used in [
26] to model the daily EV charging profile in the non-residential sectors. In this model, they considered various random parameters that affected the charging profile, such as charging power level, initial SOC, start charging time, and charging period. In [
27], the EV charging model was designed based on real EV charging data collected from a residential housing company in Norway. The authors used the plug-in duration and the energy charged information as input parameters to the proposed model to determine the EV owner’s charging behavior.
In [
28], EV consumption information was recorded from smart meters in every minute to determine the daily energy consumption. The authors divided the data into four clustering methods to identify the daily charging habits. In this study, the charging habits were identified and analyzed to generate the individual EV charging model. Then, a bottom-up approach was designed to forecast the aggregated EV charging model. Gaussian mixture distribution was used in [
29] to determine the EV charging demand pattern based-on actual data, which was collected from various charging stations in South Korea. The researcher used the Monte Carlo simulation to generate the aggregated EV charging demand.
However, since the historical EV charging data were not readily accessible, many studies suffered from generating an accurate EV charging model. To tackle this problem, some previous studies had to make some assumptions about the missing data and use surveys that reflected the EV owners’ behaviors to model the parameters [
30,
31]. In [
32], the author assumed that the average daily driving distance was constant and from this amount, the initial SOC was calculated. Moreover, the author assumed that all EV owners plugged in and charged their EVs immediately after arriving home. In addition, once they arrived home, they did not leave home until morning. The work in [
33,
34] used a mathematical analysis to determine the EV charging demand based on the temporal travel behavior or charging behavior. Some studies ignored important parameters that had high impacts on the EV charging profile. For example, [
28] did not include the initial SOC or EV daily consumption during driving. Therefore, designing an accurate and reliable residential EV charging model is a challenging task.
In this paper, we developed individual and aggregated EV charging models based on actual EV charging profiles. The model parameters included battery capacity, charging power level, start charging time, daily EV charging energy, and the initial state of charge. These parameters were captured by a different type of statistical method by analyzing the actual data.
Furthermore, since this paper focused on EV charging impacts on the residential sector, only the residential charging data were considered. We mapped the latitudes and longitudes of all the charging locations for all the charging instances to identify whether the charging locations were residential or non-residential.
This study proposed data-driven and parameterized individual and aggregated EV charging models to predict the EV charging load in the urban residential sector. The proposed model parameters can be tuned based on data from different locations/cities/countries; therefore, it can be used widely. The proposed EV charging model can be used to evaluate the impact of EV penetration on residential power distribution systems. It aims to develop individual and aggregated EV charging models that describe factors affecting the residential charging behaviors and predict the aggregated EV charging profile of various types of EVs at each load bus of the distribution network.
The contributions of this work are summarized as follows:
- 1.
The proposed data-driven and parameterized EV charging models are accurate and robust.
- 2.
The EV charging models can predict the EV charging loads in various future scenarios, such as different EV numbers, initial SOC, charging levels, and EV types (e.g., electric trucks).
- 3.
The model parameters can be tuned based on other actual data so that the proposed models can be widely applied in different cities or countries.
- 4.
The location-based algorithm designed to identify the residential charging can be used to classify the EV charging data in different sectors.
- 5.
The EV charging models can be embedded into load flow studies to evaluate the impacts of EV penetration on the power distribution systems, such as sustained under voltage, line loss, and transformer overloading.
The remainder of the paper is organized as follows.
Section 2 illustrates the methodology, which includes actual EV charging data preparation and the model parameter identification.
Section 3 presents the simulation results. The discussion is presented in
Section 4. The conclusion of the paper is presented in
Section 5.
2. Methodology
This section illustrates the methodology of the proposed individual and aggregated EV charging models. Since the proposed models are data-driven, the actual EV charging data are presented first. The model parameters are then discussed in turn.
2.1. Data Preparation and Analysis
To tune the model parameters, we used the actual EV charging data in September 2021 in Saskatchewan, Canada. The actual data were collected by FleetCarma company in an EV pilot program in Saskatchewan, Canada, in 2021 [
24]. The data were measured by the Geotab C2 device and plugged into the vehicle’s diagnostics port. A number of EV owners participated in this program. For example, 74 EV owners participated in this program in September 2021.
The data source contains the actual EV charging data in Saskatchewan from April to October 2021. We used the September charging data as an example to model and tune the parameters. The data contain the charging power, charging locations, driving periods, charging period, EV models, start charging time, the initial state of charge (
), and the final state of charge (SOC). In the data, the charging of 74 EVs was recorded every 15 min. The charging locations include the residential sector, commercial charging stations, workplaces, hotels, malls, farms, camping areas, etc.
Table 1 shows the vehicle types and their battery capacities.
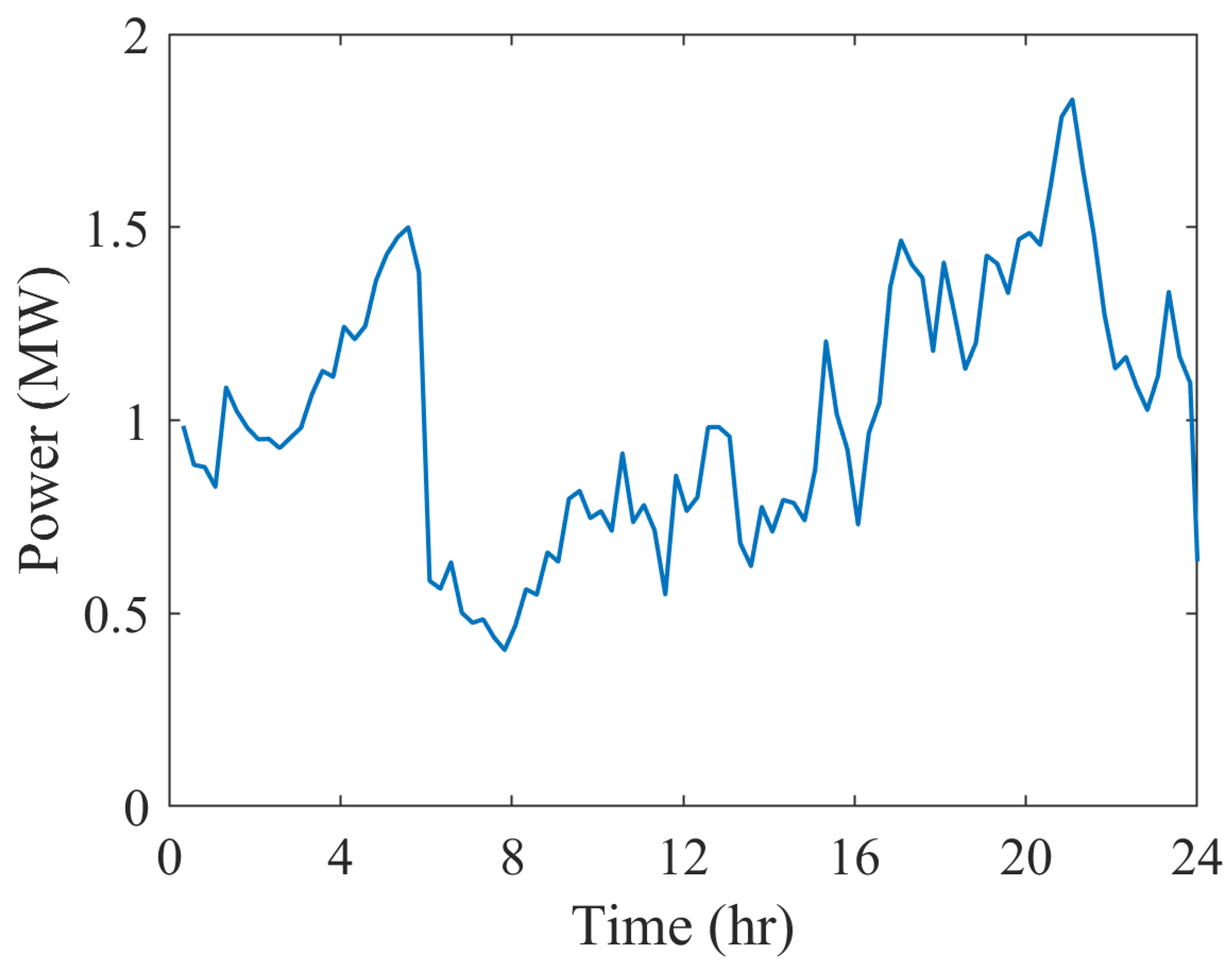
Figure 1 shows the actual aggregated charging profiles.
First, the bad data (e.g., wrongly recorded data) were removed and the missing data were filled using the interpolation method.
Second, since this study developed EV charging models for the residential sector, only the residential charging data were needed to develop the model parameters. Therefore, we needed to identify the residential charging profiles by removing the non-residential charging from the raw data, such as the charging at commercial charging stations, hotels, malls, farms, camping areas, etc.
The EVs were not charged every day in the residential sector. For example, EV no. 1 was charged for 13 days (throughout the 30 days) in September. In total, the 74 EVs were charged for 893 days in September. Therefore, there were 893 individual daily EV charging profiles in September.
Two methods were considered to remove the non-residential data, which are explained in the next two subsections.
2.1.1. Method 1: Identifying the Residential Charging Data Based on Charging Power
In this method, we identified the residential EV charging data based on the charging power level.
There were three EV charging levels: Level 1, level 2, and level 3. The charging power rates for level-1 chargers were between 1.4 and 1.9 kW. The charging current was 12–15 A and the charging voltage was 120 V [
35]. The charging power rates for level-2 chargers were between 1.9 and 19 kW. The charging current was 12–80 A and the charging voltage was 208–240 V [
36]. Level-2 chargers were the preferred chargers for EV owners. The level-3 charging power was typically above 50 kW [
37].
Since the level-1 or level-2 chargers were typically installed in the residential sector, the charging data above 19 kW could be removed to identify the residential charging profiles.
Figure 2 shows the aggregated daily charging profiles before and after removing the non-residential charging using this method.
This method could be valid if the charging location information is not available in the data or the charging location information is difficult to interpret. The drawback of this method is that it could be inaccurate. For example, some non-residential charging locations, such as level-1 and 2 charging stations, farms, camping areas, hotels, malls, and workplaces are rated below 19 kW, which cannot be removed by this method.
2.1.2. Method 2: Identifying the Residential Charging Data Based on Charging Locations
In this method, we used the location data for each charging interval to identify the residential EV charging profile. In our data, the charging locations are recorded as the latitudes and longitudes. We needed to first identify residential or non-residential locations based on the latitude and longitude. Then, we could remove the charging data at non-residential locations.
Figure 3 shows the flowchart of the algorithm to identify the residential charging profiles by removing the non-residential charging.
From all the charging data points, we identified all of the unique charging locations. Then, we identified whether these locations were residential. For example, there were 22,926 charging data points in our data. From these charging points, we identified 149 unique charging locations. We mapped these 149 locations to Google Maps and manually identified if these locations were residential or non-residential. We essentially created a lookup table to label all the charging data points as residential or non-residential. Finally, we removed all the charging data points labeled as non-residential.
Figure 4 represents the aggregated daily charging profiles at all locations and in the residential sector. The blue curve shows the charging profile of all charging locations. The orange curve shows the charging profile of the residential sector after removing the non-residential charging data.
Identifying the residential charging data based on the charging location method is more accurate and will be used to design the simulation model.
2.2. Individual EV Charging Model
Figure 5 shows the architecture of the proposed individual EV charging model. The model parameters include battery capacity, charging power level, start charging time, daily EV charging energy, and initial SOC. From this model, the individual EV charging profile can be generated. Each parameter is modeled by a random number, and statistical methods are used to identify the distribution of the random numbers.
2.2.1. EV Battery Capacity
EV battery capacities are modeled based on typical EV types that are illustrated in
Table 1. The histogram of the EV battery capacities is shown in
Figure 6. It can be seen that among 74 EVs, the majority (27 EVs) have a battery capacity of 50 kWh, while the others scatter from 9 to 100 kWh.
By analyzing the data, we clustered those battery capacities to 30, 40, 50, 60, and 75 kWh, as shown in
Figure 7. We then obtained the percentages of EVs with those battery capacities, e.g., 60% of EVs have batteries with capacities of 50 kWh. In the simulation, these percentages are multiplied by the simulated number of EVs to get the EV battery capacity for all EVs. For example, if we simulate the charging profiles for 100 EVs, 60 EVs would have battery capacities of 50 kWh.
2.2.2. Rated Charging Power
To model the charging power for each EV at home, we analyzed the actual EV charging power data. The dataset contains 74 EVs. The daily charging power for each EV is not fixed at one charging value. Therefore, we identified the most frequent charging value for each EV, as shown in
Figure 8.
To increase the accuracy, we used two random numbers to model the rated charging power based on the charging levels. Specifically, one random number for level-1 charging and another random number for level-2 charging. Among the 74 EVs, 28% of EVs charge at level 1.
Figure 9 shows the histogram of the EV charging power at level 1. As can be seen, the variation of the rated charging power at level 1 is small (1.4–1.9 kW). Therefore, a uniform distribution is a good choice to model this random number for charging power at level 1.
A total of 72% of EVs charge at level 2.
Figure 10 shows the histogram of the EV charging power at level 2. The EV charging power at level 2 varies between 2.4 and 16 kW. To model the distribution of the level-2 EV charging power, we used the inverse transform sampling method [
38].
The inverse transform sampling method is a method for generating random numbers from any probability distribution given its cumulative distribution function (CDF). This method suggests a match of the CDF with a random number by finding the inverse image of the random number
r on the
x-coordinate. To model the EV charging power at level 2, we calculated the CDF of the actual charging power. Then, we mapped a random number between 0 and 1 on the
y-axis. After that, we found their inverse images on the
x-axis as shown in
Figure 11.
2.2.3. Start Charging Time
The majority of EVs can be pre-programmed to have a pre-determined start charging time. Therefore, assuming that the EV owners plug-in their vehicles immediately after arriving home is not accurate. In this study, we modeled the start charging time based on actual charging data.
As mentioned, the EVs were not charged every day in the residential sector. For example, EV no. 1 was charged for 13 days (throughout the 30 days) in September. In total, the 74 EVs were charged for 893 days in September. Therefore, there were 893 individual daily EV charging profiles in September.
To model the start charging time, we analyzed the actual charging data and extracted the start charging time for each EV. The total start charging times were 937, which is greater than 893 charging days. Therefore, some EVs were charged multiple times in a day. We assumed that the EVs that have multiple charging periods charged their EVs twice per day. We then used Equation (
1) to determine the number of EVs that had multiple charging periods per day. The inverse transform sampling method was used to model the distribution of the start charging times from the actual data.
where
,
, and
represent the number of EVs with multiple charging periods, the number of charging days, and the number of start charging times, respectively.
Figure 12 shows the histogram of the actual start charging time for all EVs.
Figure 13 shows the histogram of the simulated distribution of the start charging time.
2.2.4. Daily Energy Consumption
Intuitively, the daily EV energy consumption can be calculated based on the daily driving distance and the consumed energy per km. However, this work did not use this method for three reasons. Firstly, we found that some EVs drive for a very long distance on some days. Those EVs must have been charged in non-residential locations since the energy required for such long driving distances exceeded the EV battery capacity. Since our study developed the residential EV charging model, we did not consider non-residential charging. Hence, we could not rely on the driving distance in the data to calculate the daily EV energy consumption. Secondly, energy consumption per km varied significantly based on the EV model, size, and traffic conditions (e.g., city road or highway). Thirdly, the weather conditions had a large impact on adding auxiliary loads, such as air conditioners and heaters, which increased the EV energy consumption.
Instead of using the driving distance, we directly calculated the EV charging at home from the prepared residential charging profiles. The blue bars in
Figure 14 show the histogram of the actual daily EV charging energy at home. We used the Burr distribution [
39] to model the distribution of the daily EV charging energy at home.
The Burr distribution was used to model continuous variables that were always positive. Thus, various values of its boundaries covered (a wide set of) skewness and kurtosis. The probability density function of the Burr distribution is given by Equation (
2)
where
x represents the actual daily EV charging energy,
is the scale parameter, and
c and
k represent the shape parameters.
We determined
,
c, and
k values using the maximum likelihood estimation [
40] and, hence, we could fit the actual EV charging energy data and model the daily energy consumption parameter. Based on the actual data, we calculated the parameters of the Burr distribution as
= 13.54,
c = 1.72,
k = 1.64.
Figure 14 shows the actual daily EV charging energy and the Burr distribution density function. It can be seen that the Burr distribution function can be used to model the distribution of the daily EV charging energy.
Figure 15 shows the histogram of the simulated daily EV charging energy.
2.2.5. Initial State of Charge
The initial state of charge (
) of the EV represents the level of charge of the battery according to its full capacity.
is a random number that depends on the distribution of the EV battery capacity (
) and the daily EV charging energy (
). The
calculation is described by Equation (
3).
where
i represents the EV number.
2.3. Aggregated EV Charging Model
The main goal of this study was to design individual and aggregated EV charging models that could be used in various applications. The individual EV charging model was generated based on actual charging data, as discussed in
Section 2.2. In this section, the Monte Carlo method [
41] is used to develop the aggregated EV charging model.
The Monte Carlo simulation is a mathematical method that is used to determine the possible solutions to uncertain variables. Hence, it recalculates the outcome, multiple times, in iterative ways, where at each iteration it uses a random value for each parameter.
Figure 16 describes the flowchart of the simulation procedure to determine the aggregated EV charging profile.
We first define the number of EVs to aggregate in the simulation. Then, for each individual EV, we generate the random value for each parameter. From these parameters, the individual EV charging profile can be generated. Finally, we aggregate the charging profiles for all EVs.
Figure 17 describes the process of identifying the rated charging power for each EV. Based on the method described in
Section 2.2.2, 28% of EVs are charged at level 1 and 72% of EVs are charged at level 2. Uniform distribution was used to simulate the level-1 charging power while the inverse transform sampling method was used to model the distribution of the level-2 charging power.
4. Discussion
In this study, we analyzed the actual EV charging profiles in Saskatchewan [
24]. The data were cleaned, prepared, and analyzed, e.g., removing bad data, interpolating missing data, and removing non-residential charging data. The data were analyzed to understand the characteristics of the EV charging load in the urban residential sector. The analyzed results were used to develop individual and aggregated EV charging models.
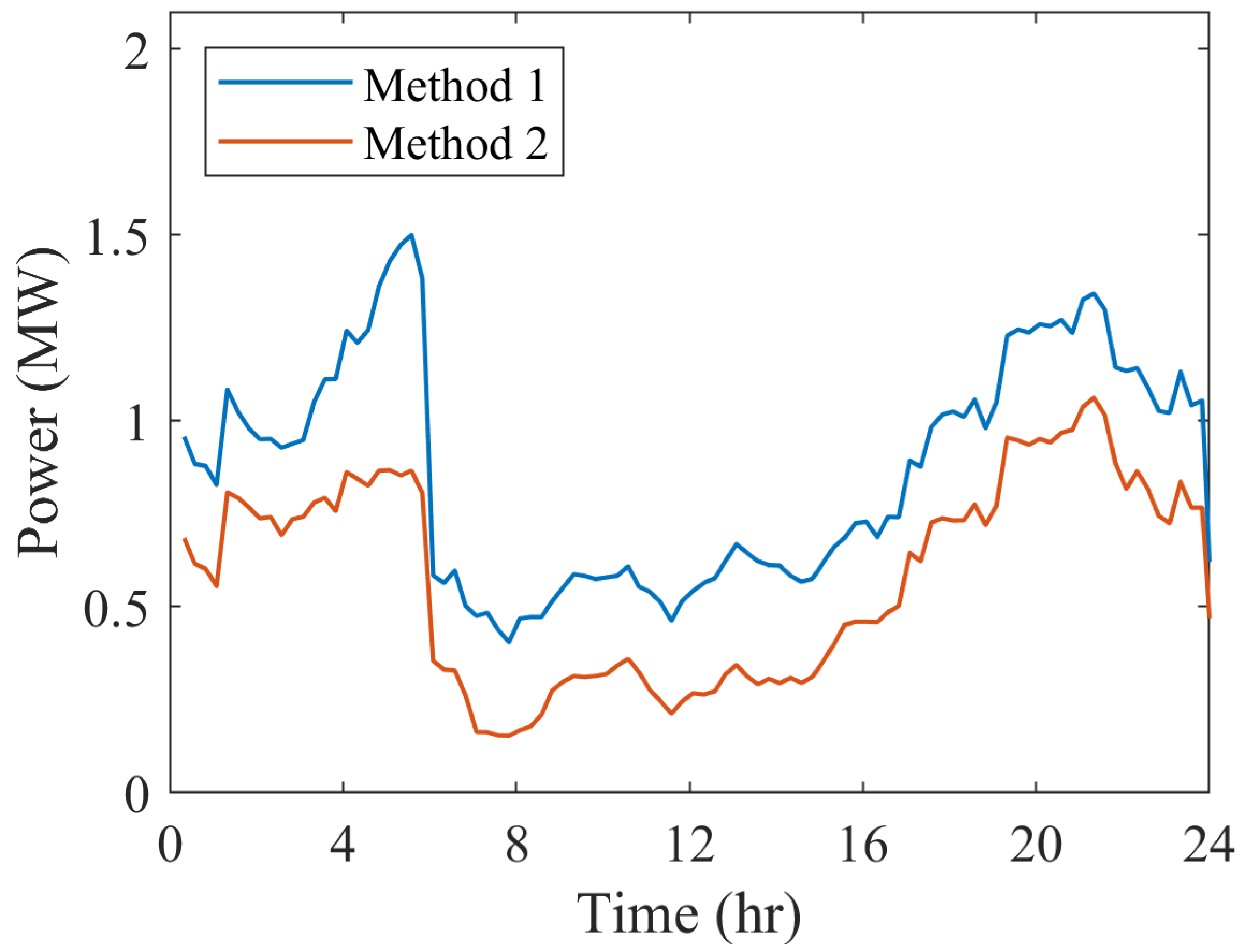
Two methods were used to identify and remove the non-residential charging data. In method 1, the residential charging data were identified based on the charging power level. In method 2, the residential charging data were identified based on the charging locations. We used the latitude and longitude data to identify the charging locations for each charging interval.
Figure 23 shows a comparison between the two methods. The blue curve represents the aggregated residential EV charging profile based on the charging power level, while the orange curve represents the aggregated residential EV charging based on charging locations. The total charging energy of the residential EV charging was 21.20 MWh based on method 1, while the total charging energy of the residential EV charging was 13.63 MWh based on method 2. Method 1 can be valid if the charging location information is not available in the data or the charging location information is difficult to interpret. In our study, since the data have the charging locations and we designed an algorithm to identify the residential locations, we used method 2 to identify the residential charging profiles. In addition, we believe that method 2 is more accurate in our study.
The extracted residential EV charging profiles are analyzed to develop the individual EV charging model. The model parameters include battery capacity, charging power level, start charging time, daily EV charging energy, and initial SOC. From this model, the individual EV charging profile can be generated. Each parameter is modeled by a random number, and statistical methods are used to identify the distribution of the random numbers, such as the inverse transformation method and the Burr distribution function. The Monte Carlo method is used for EV charging aggregation.
Four scenarios were designed to evaluate and validate the proposed models. The simulation results of some individual EV charging profiles are illustrated in Scenario no. 1.
Figure 18 provides four examples of the charging profiles of different types of EVs. It can be seen that each EV charging profile has different characteristics, such as the start charging time, charging duration, and charging power level. The different charging profiles will have different impacts on the power distribution systems. Therefore, the EV aggregation and statistical characteristics need to be studied.
The aggregation of EV charging profiles is presented in scenarios 2 and no. 3.
Figure 21 compares the simulation results of the aggregated EV charging profile of 893 EVs and the actual profile for 74 EVs over 893 days of charging data. It can be seen that the two curves are similar. The correlation coefficient of the actual data and simulation results was 0.91. The similarity between the actual data and the simulation results validates our proposed method. By changing parameters, the proposed models can predict EV charging in different scenarios.
Furthermore,
Figure 24 shows the aggregated charging profiles of 893 EVs in 20 different simulations. Each colored line shows the results in one simulation. The similarity of each run shows that the model is robust, and the simulation results are reproducible.
Finally, we statistically analyzed the aggregated EV charging profiles with various numbers of EVs, and the results are shown in
Figure 22. We can see a big drop in the average peak demand from 1 to 2 EVs and an exponential decay by increasing the number of EVs. The diversified peak demand hovers around 3 kW when the EV numbers are greater than 10. This analysis can help utilities evaluate or revise the design standards of the power distribution system (e.g., the transformer capacity) in the urban residential sector.


 ,
, 























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}