
Faulty Section Location Method Based on Dynamic Time Warping Distance in a Resonant Grounding System

Abstract
:1. Introduction
- We are able to determine the faulty section or line end fault under diverse fault conditions;
- The method is applicable for single-phase grounding faults in a distribution network with distributed generation connected;
- The faulty section location method proposed in this paper is suitable for high-resistance grounding faults, reflecting the transition resistance capability of up to 5000 Ω;
- Under extreme fault conditions, the faulty section location accuracy of the method proposed in this paper is higher than that of the existing traditional methods.
2. Materials and Methods
2.1. Characteristics of Single-Phase Grounding Fault Current in Resonant Grounding System
2.2. The Principle of Fault Location
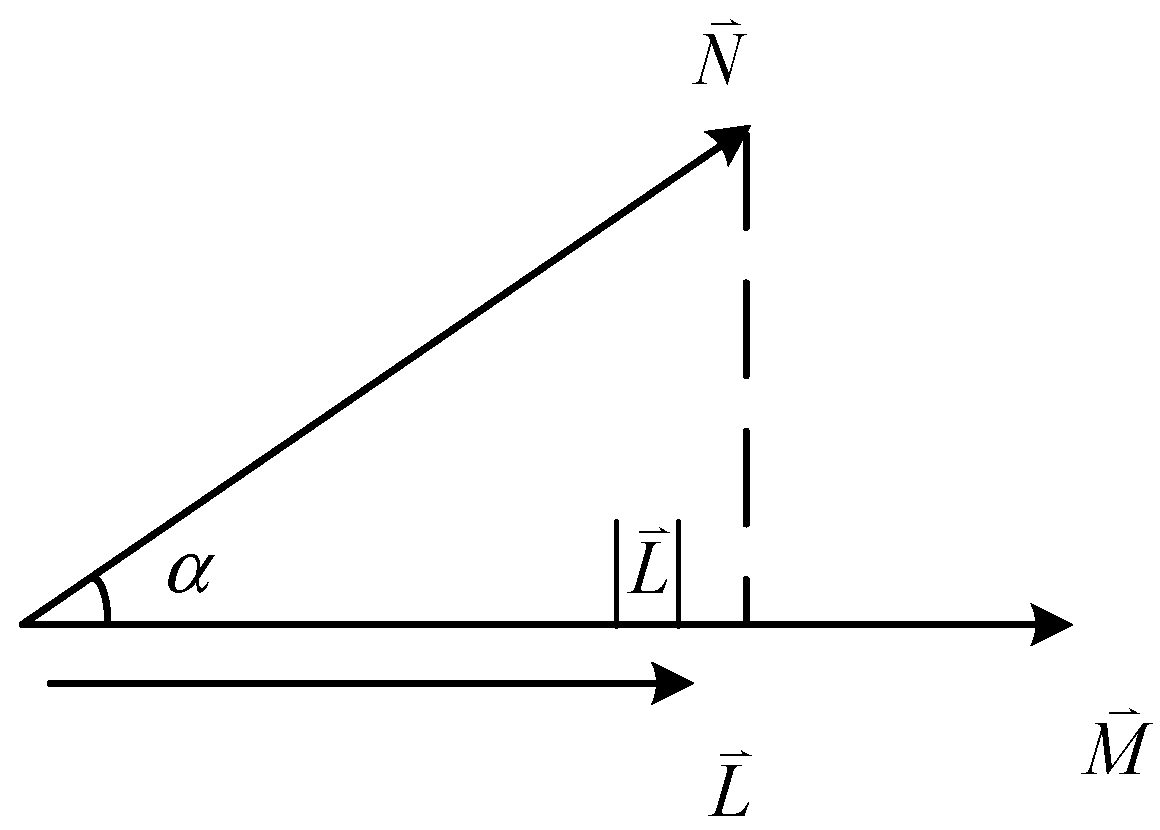
2.2.1. Transient Signal Preprocessing
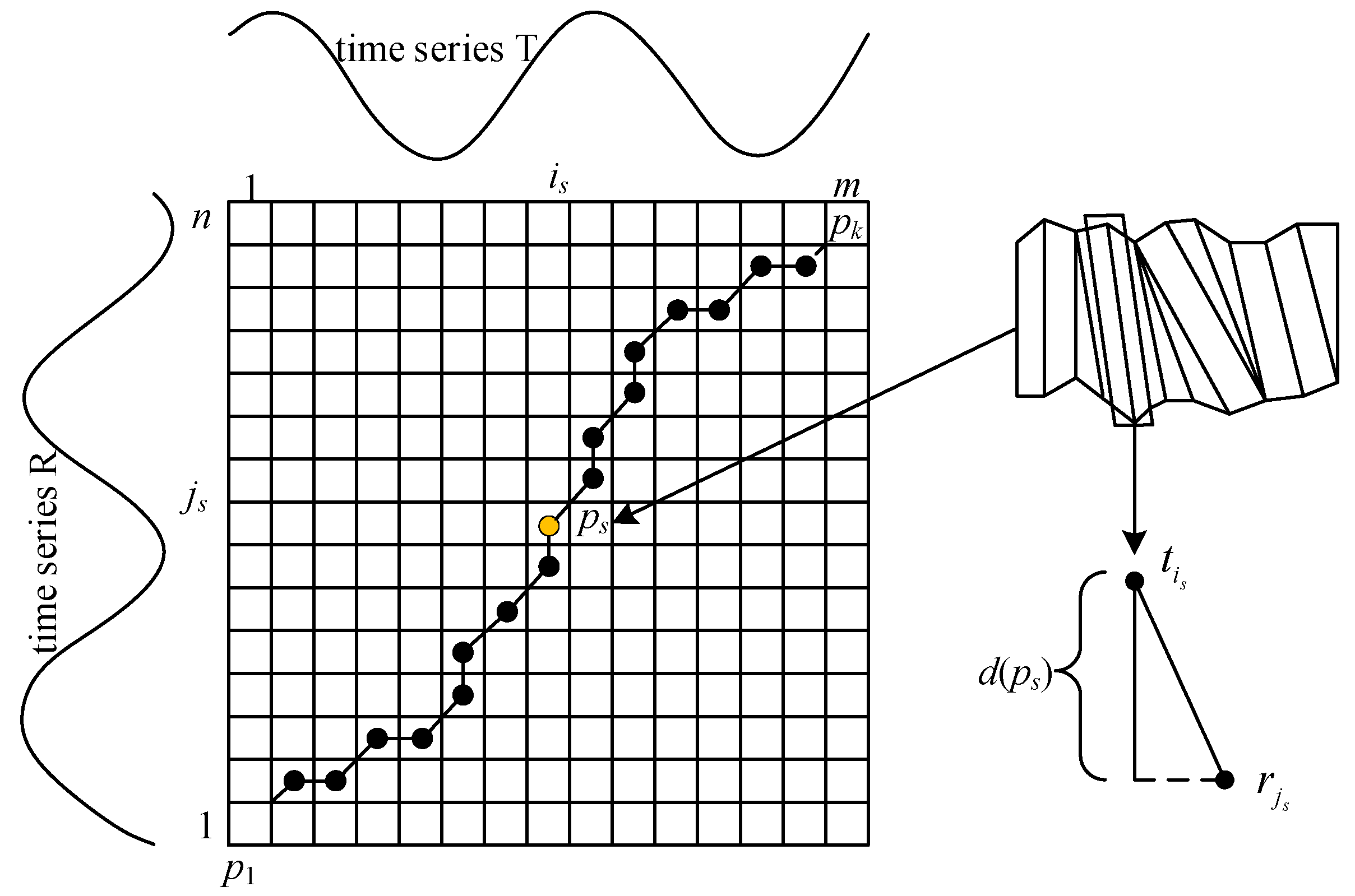
2.2.2. Dynamic Time Warping Distance
Principle of DTW Algorithm
- (1)
- Boundary conditions: the starting point is (1, 1) and the end point is (m, n).
- (2)
- Boundedness: the sequence of time series cannot be changed. , where K is the total number of steps of the curved path P.
- (3)
- Monotonicity: If the curved path moves from point ps to the next point ps+1, it must satisfy is+1 ≥ is, js+1 ≥ js, i.e., phenomenon ① in Figure 4 is not allowed.
- (4)
- Continuity: The path can only proceed along adjacent points, i.e., in Figure 3, if the ps in the curved path reaches the next step ps+1, it needs to satisfy is+1 − is ≤ 1, js+1 − js ≤ 1. As shown in Figure 4, in order to ensure continuity, in ②, the path to point D(i, j) must pass through one of D(i − 1, j − 1), D(i − 1, j), D(i, j − 1), and the discontinuity in ③ is not allowed.
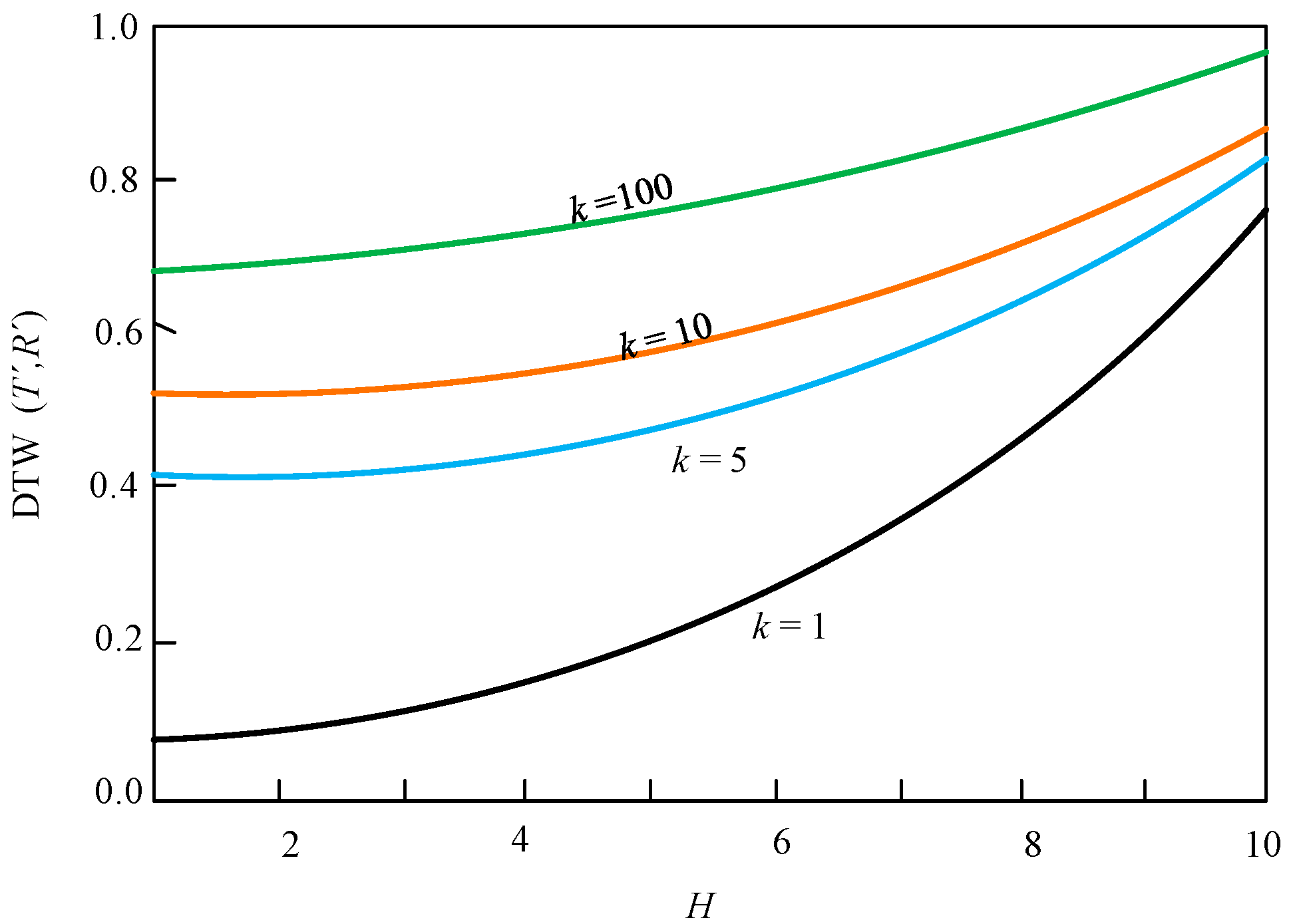
Relationship between DTW Distance and Zero-Sequence Current Difference
2.2.3. FCM Clustering
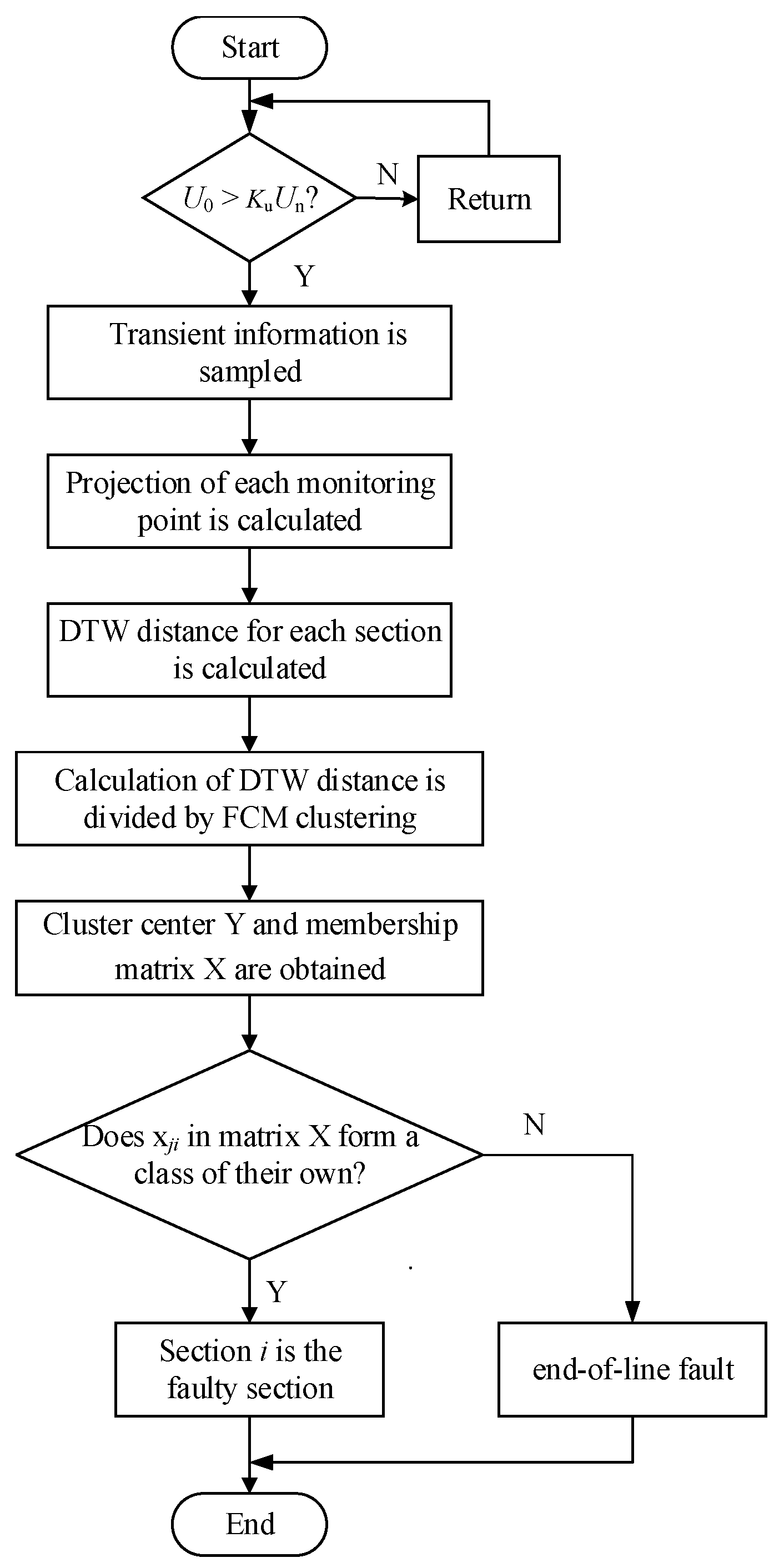
2.2.4. Faulty Section Location Process
- (1)
- When it is detected that the instantaneous value of the busbar zero-sequence voltage is greater than the threshold value KuUn (Un is the rated voltage of the busbar, and the coefficient Ku is usually 0.35), the faulty section location procedure is started.
- (2)
- The transient zero-sequence voltage of the busbar and the transient zero-sequence current of each monitoring point of the faulty line are extracted.
- (3)
- The transient zero-sequence current of each monitoring point of the faulty line is projected onto the transient zero-sequence voltage of the busbar, and then we calculate the DTW distance of the projected value at both ends of each section; finally, the DTW distance of each section is clustered and divided by the FCM clustering algorithm to realize fault location.
3. Results and Discussion
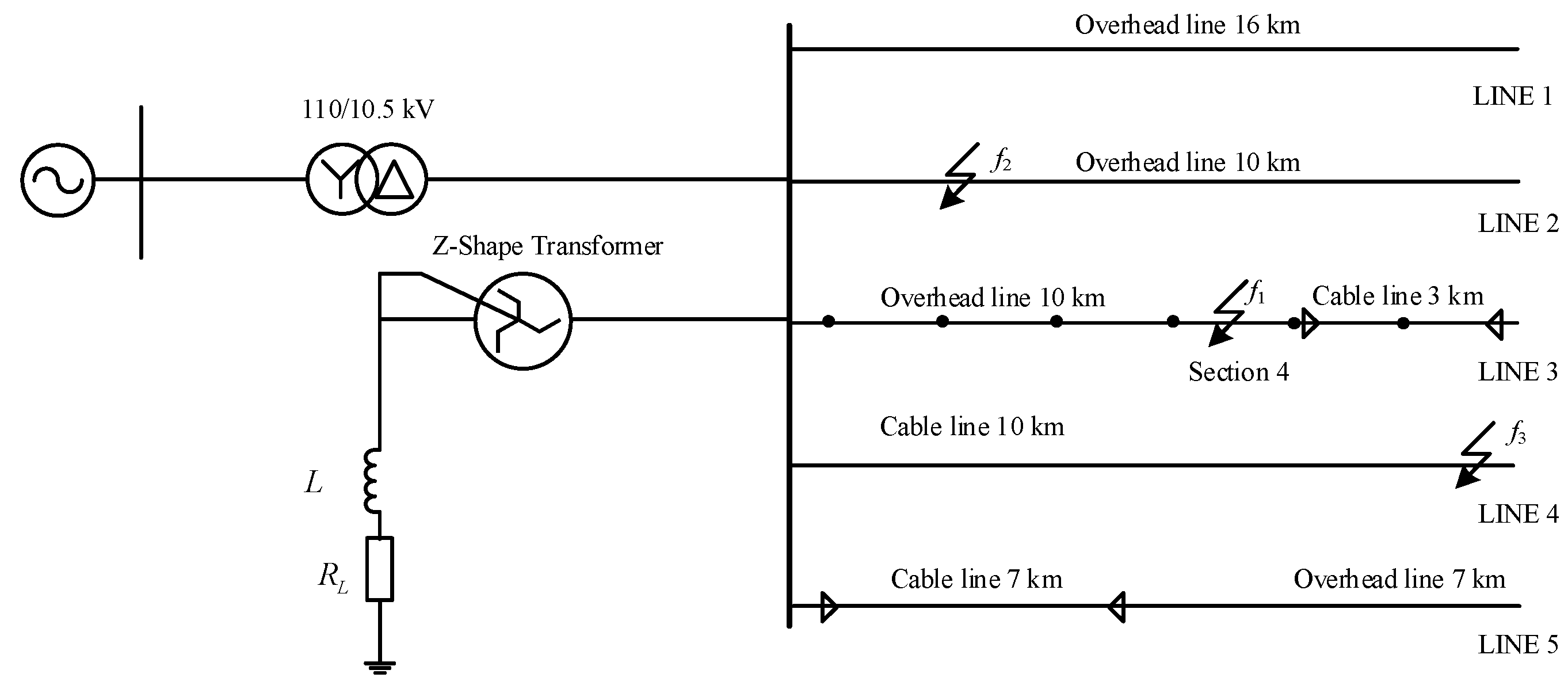
3.1. Simulation Model and Parameters
3.2. Simulation Results and Analysis under Different Fault Conditions
- (1)
- Different transition resistances

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transition Resistance/Ω | Cluster Center | Membership Degree Matrix | Location Result |
|---|---|---|---|
| 0 | Section 4 | ||
| 10 | Section 4 | ||
| 100 | Section 4 | ||
| 1000 | Section 4 | ||
| 3000 | Section 4 | ||
| 5000 | Section 4 |
- (2)
- Initial phase angle of different faults
| Fault Initial Phase Angle/° | Cluster Center | Membership Degree Matrix | Location Result |
|---|---|---|---|
| 0 | Section 4 | ||
| 30 | Section 4 | ||
| 45 | Section 4 | ||
| 60 | Section 4 | ||
| 90 | Section 4 |
- (3)
- Fault occurring at the end of the line
| Transition Resistance/Ω | Fault Initial Phase Angle/° | Cluster Center | Membership Degree Matrix | Location Result |
|---|---|---|---|---|
| 10 | 0 | line end fault | ||
| 500 | 90 | line end fault |
- (4)
- Influence of white Gaussian noise
| Signal-to-Noise Ratio/db | Cluster Center | Membership Degree Matrix | Location Result |
|---|---|---|---|
| 30 | Section 4 | ||
| 60 | Section 4 | ||
| 90 | Section 4 |
- (5)
- Influence of distributed generation access
| Transition Resistance/Ω | Fault Initial Phase Angle/° | Cluster Center | Membership Degree Matrix | Location Result |
|---|---|---|---|---|
| 0 | 0 | Section 4 | ||
| 10 | 30 | Section 4 | ||
| 50 | 45 | Section 4 | ||
| 100 | 60 | Section 4 | ||
| 500 | 90 | Section 4 |
3.3. Comparative Analysis with other Positioning Methods
3.4. Field Data Test and Analysis
4. Conclusions
- (1)
- The transient zero-sequence current of each section of the faulty line is projected onto the transient zero-sequence voltage of the busbar by the transient projection method, so that the difference between the faulty section and the nonfaulty section is more obvious, which can improve the location accuracy of single-phase grounding faults in resonant grounding systems.
- (2)
- The location method proposed in this paper can accurately locate a fault under the conditions of different transition resistances, different initial phase angles of faults and different fault points, and it has the ability to resist the interference of Gaussian white noise.
- (3)
- The positioning method proposed in this paper is also applicable to the case of distributed power access.
- (4)
- A large number of simulation data show that the positioning method proposed in this paper has strong adaptability to the high-resistance grounding fault in the resonant grounding system, reflecting that the transition resistance capability can reach 5000 Ω.
- (5)
- The method proposed in this paper is verified by the field data test.
- (1)
- No need to set threshold of fault location criterion.
- (2)
- Suitable for high resistance grounding fault.
- (3)
- Suitable for grid with distributed power access. Compared with steady-state positioning method, the transient positioning method proposed in this paper is relatively complex and requires higher data acquisition and processing capabilities of the positioning device.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bingyin, X.; Yongduan, X.; Tianyou, L. Review of line selection of grounding fault in non-effectively grounding network techniques. Electr. Equip. 2005, 6, 1–7. [Google Scholar]
- Xue, Y.; Li, J.; Chen, X.; Xu, B.; Li, T. Faulty feeder selection and transition resistance identification of high impedance fault in a resonant grounding system using transient signals. In Proceedings of the CSEE, Savannah, GA, USA, 7–9 November 2017; Volume 37, pp. 5037–5048. [Google Scholar]
- Fang, Y.; Xue, Y.; Song, H.; Guan, T.; Yang, F.; Xu, B. Transient Energy Analysis and Faulty Feeder Identification Method of High Impedance Fault in the Resonant Grounding System. Proc. CSEE 2018, 38, 5636–5646. [Google Scholar]
- Ji, T.; Sun, T.J.; Xue, Y.D.; Xu, B.Y.; Chen, P. Current status and development of fault location technique for distribution network. Relay 2005, 33, 32–37. [Google Scholar]
- Zhensheng, W.U.; Xuechang, Y.A. Test on a transfer function algorithm for locating ground faults in power distribution networks. Autom. Electr. Power Syst. 2003, 27, 34–37. [Google Scholar]
- Huifen, Z.; Fan, Z.; Zhencun, P. Automatic fault locating algorithm based on signal injection method for distribution system. Electr. Power Autom. Equip. 2008, 28, 39–43. [Google Scholar]
- Zhang, L.; Wang, J.; Wang, L.; Jin, N.; Chen, M.; Jiang, W. A fault section location method for active distribution network based on discrete orthogonal S-transform and energy similarity. Electr. Meas. Instrum. 2019, 56, 50–55. [Google Scholar] [CrossRef]
- Yongduan, X.; Yining, S.; Riliang, L.; Bingyin, X.; Xiaoyong, Y. The processing technology of single-phase earth fault based on the transient power direction in non-solidly earthed network. Distrib. Util. 2018, 35, 3–8. [Google Scholar]
- Linli, Z.; Zhenzhen, G.; Shidong, Z. Location approach for single phase-to-earth fault in distribution network by comparing transient frequencies. Proc. CSU-EPSA 2017, 29, 135–138. [Google Scholar]
- Zheng, Q.; Tianqi, H.; Jianxiong, L. Analysis on grounding fault mechanism of DC filter in HVDC Transmission system. Autom. Electr. Power Syst. 2018, 42, 144–152. [Google Scholar]
- Weiguo, L.; Wenwen, X.; Zhenyu, Q. Fault location method of distribution network based on concave convex characteristics of transient zero sequence current. Power Syst. Prot. Control 2020, 48, 164–173. [Google Scholar] [CrossRef]
- Zhan, Q. Distribution Network High Impedance Fault Resolving Technique Study Based on Transition State Projection Method. Master’s Thesis, Fuzhou University, Fuzhou, China, 2018. [Google Scholar]
- Huang, C.; Liu, P.; Jiang, Y.; Leng, H.; Zhu, J. Line Differential Protection Based on Dynamic Time Warping Distance in Active Distribution Network. Trans. China Electrotech. Soc. 2017, 32, 240–247. (In Chinese) [Google Scholar]
- Penghui, L.I.; Chun, H. A fault section location method for small-current grounding fault in distribution network based on dynamic time warping distance. Power Syst. Technol. 2016, 40, 952–957. [Google Scholar]
- Shao, X.; Guo, M.; You, L. Faulty line selection method using mutual correlation cluster of grounding fault waveforms based on improved DTW method. Electr. Power Autom. Equip. 2018, 38, 63–71. [Google Scholar]
- Darioush, R.; Lu, T. A Literature Review of the Control Challenges of Distributed Energy Resources Based on Microgrids (MGs): Past, Present and Future. Energies 2022, 15, 4676. [Google Scholar] [CrossRef]



| Line Type | R0/Ω | C0/μF | L0/mH | R1/Ω | C1/μF | L1/mH |
|---|---|---|---|---|---|---|
| Overhead line | 0.2750 | 0.0054 | 4.6000 | 0.1250 | 0.0096 | 1.3000 |
| Cable line | 2.7000 | 0.2800 | 1.0190 | 0.2700 | 0.3990 | 0.2550 |
| Fault Location Method | Fault Criterion | Section Number | Location Result | ||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |||
| Improved DTW distance | Membership degree matrix | Section 2 | |||||
| Correlation Coefficient Method | Compare the degree of correlation coefficient with the threshold. | 1 | 0.714 | 1 | 1 | 1 | Section 2 |
| Grey Relational Degree | Compare the degree of grey correlation with the threshold. | 0.664 | 0.518 | 0.748 | 0.535 | 0.697 | Section 2 |
| Empirical Mode Decomposition | Che positive and negative of the difference between adjacent energy weight coefficient. | negative | positive | negative | positive | negative | No result |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.; Zhang, X.; Wang, R.; Cheng, M.; Gao, Z.; Zhang, Z.; Yu, W. Faulty Section Location Method Based on Dynamic Time Warping Distance in a Resonant Grounding System. Energies 2022, 15, 4923. https://doi.org/10.3390/en15134923
He Y, Zhang X, Wang R, Cheng M, Gao Z, Zhang Z, Yu W. Faulty Section Location Method Based on Dynamic Time Warping Distance in a Resonant Grounding System. Energies. 2022; 15(13):4923. https://doi.org/10.3390/en15134923
Chicago/Turabian StyleHe, Yu, Xinhui Zhang, Rui Wang, Mengzhu Cheng, Zhen Gao, Zheng Zhang, and Wenxin Yu. 2022. "Faulty Section Location Method Based on Dynamic Time Warping Distance in a Resonant Grounding System" Energies 15, no. 13: 4923. https://doi.org/10.3390/en15134923
APA StyleHe, Y., Zhang, X., Wang, R., Cheng, M., Gao, Z., Zhang, Z., & Yu, W. (2022). Faulty Section Location Method Based on Dynamic Time Warping Distance in a Resonant Grounding System. Energies, 15(13), 4923. https://doi.org/10.3390/en15134923