1. Introduction
Military transport systems aim to ensure that transport capacity corresponds to the existing needs. The determinants of the level of transport needs include combat operations, training plans and the current activity of military units. The fleet of reliable vehicles is one of the main factors determining the high quality and timely implementation of processes in modern transport systems. The condition for the effective operation of the system is to maintain the means of transport in a state of technical efficiency and be ready to perform tasks [
1,
2]. The fulfilment of this condition is possible thanks to the organization of operating systems with appropriate technical resources to carry out processes of diagnosis, servicing and repair of vehicles. Along with the increase in the intensity of the use of means of transport, the demand for fuel and other consumables increases significantly, especially in the case of military vehicles traveling outside the area of public roads [
3,
4,
5].
Military exploitation systems are largely based on a plan-preventive maintenance strategy, aiming to maximize the technical availability of facilities [
6,
7,
8,
9]. This strategy assumes the implementation of maintenance with a specific labor intensity, in accordance with the required scope. The guidelines for maintenance activities, time intervals and the size of the service life between maintenance are defined based on the manufacturer’s technical specifications and the knowledge and experience of specialists dealing with planning and standardization of operation at individual management levels. The main disadvantages of this strategy are its cost-intensive nature and low flexibility.
The operation process covers activities related to a technical object from the moment of its production to its liquidation. During this period, there are essentially two overlapping sub-processes usage and maintenance. The rational use of machines and devices allows for extending the intervals between subsequent maintenance services, recreating the technical service life of the facility, and also reducing the current operating costs. The model of the operation process should, on the one hand, reflect the basic technical characteristics of the object consistent with the modeling objective, and on the other hand, it should be used for the rational forecasting of use and maintenance [
10,
11,
12,
13].
Markov’s theory has found applications in many fields of science and technology. There are many scientific studies in the literature on the use of Markov processes for reliability modeling [
14,
15], the operation of objects [
16,
17,
18,
19] and technical systems [
20,
21]. Depending on the case study and the purpose of modeling, the authors constructed models based on a diverse number of operational states in the phase space. The least complicated Markov chain model was presented in [
22] and applied to simulate and optimize energy savings for machines operating in production systems. Models with three states were constructed to analyze and assess the technical availability of buses [
23], special vehicles [
24], operational readiness of wind turbine elements [
17], working time of production machines [
25], the time interval of preventive maintenance [
26] and the reliability of technical facilities [
27]. In [
28], the authors developed a five-state semi-Markov model with the Weibull distribution of the residence times of four types of buses in the states of the renewal process. This model allowed for profit optimization per unit of time and availability depending on the duration of preventive maintenance.
The comparison of the values obtained by the six-state Markov and semi-Markov models, which the authors of the publication [
29] developed for production machines, indicated that the unverified assumption of the exponential distribution of the time the object stays in states may lead to significant errors in the calculation of the readiness indices. In the presented case study, the difference between the results of the semi-Markov model and the erroneous Markov model was as much as 0.40, which is less than half of the actual value of the readiness index.
Markov models with 9- and 16-state phase spaces are presented in [
8,
30] with much more elaborate models. The increased number of states allows a detailed analysis of the process and factors affecting the technical readiness of the facility. The multi-state models presented in [
31] accurately reflected the stochastic nature of the electric vehicle driving cycle during their use in urban areas, outside the city, on the motorway and during road congestion.
Table 1 summarizes the literature review containing the latest publications in the field of modeling the exploitation process with the use of Markov theory.
In this publication, the authors addressed the issue related to the operation of light utility vehicles operating in military transport systems. The research sample consisted of 19 Honker vehicles for which detailed data were collected during the three-year research period. The operating system is focused on maintaining the high reliability of vehicles through an appropriately planned and implemented maintenance strategy. The plan-preventive system each time assumes the scope of maintenance works after a specified amount of work (mileage) or time elapsed. Unfortunately, the records of operation are still kept in the form of traditional documentation registered on an ongoing basis by direct users (drivers) and in relation to inspections and repairs by service and repair workshops. Source documents that create departure orders, technical service cards and operation plans were used to prepare detailed databases individually for each facility.
The current review of the literature allows the authors to state there are no studies on the analysis and evaluation of the operation of heavy goods vehicles with the use of the Markov theory. It was a premise for conducting scientific research and developing an exploitation model for the aforementioned group of military vehicles. In addition, Honker vehicles have a significant share in the structure of the military transport fleet of the Polish Armed Forces. Carrying out the modeling of the operation process based on the application of the Markov theory requires a thorough understanding of the examined process and enables the analysis and assessment of the basic operational indicators of the studied object.
This article presents the original methodology for creating a stochastic model of Honker vehicles based on the Markov theory. An algorithm for creating a mathematical model was developed, the practical usefulness of which was verified on the actual operation process of the said sample of vehicles. An event model covering the nine-state phase space of the process was developed. The determined values of ergodic probabilities for individual operational states constituted the basis for calculating the values of functional availability, efficiency and technical suitability indicators. From the point of view of the transport capacity of the entire system as well as economic and technical conditions, the personnel managing the vehicle operation process aim to maximize the presented readiness and/or reliability measures. The proposed methodology makes it possible to indicate possible components influencing the improvement of exploitation indicators. The performed sensitivity analysis of the model allows for the examination of the impact of improving the organization of the repair subsystem, consisting of the shortening/elimination of waiting time for spare parts, on the readiness indicators of the tested sample of vehicles.
The nine-state model adds to the current state of the literature both in terms of the subject of the study and the application of sensitivity analysis to identify opportunities for improving process efficiency. No previous scientific studies have addressed the issue of modeling the operation of light utility vehicles (trucks) using Markov and semi-Markov process theory. In addition, a completely novel way of analyzing the sensitivity of the semi-Markov model in terms of the dependence of the values of ergodic probabilities on the values of expected dwell times was proposed.
The article has been divided into the following main chapters. The introduction reviews the current state of knowledge on the application of Markov theory to the exploitation process.
Section 2 describes the methodology of creating event-based models of the operation process using the Markov theory.
Section 3 provides a statistical analysis of the source data constituting the basis for the development of the model. In
Section 4, the semi-Markov model is described, and the process research results are presented together with the model sensitivity analysis. The values of ergodic probabilities of the semi-Markov model were confronted with the standard Markov model. Finally, the
Section 5 includes the conclusions from the conducted research.
2. Methods
The actual operation processes are a composition of deterministic and random sub-processes. Random components are usually interpreted as stochastic processes
X(t) reflecting changes in the operational states of the tested object in discrete or continuous time. In the processes of exploitation at a random moment
t, the object is only in one of the states identified in the phase space
S = X(
t). This assumption requires precise determination of all possible operational states in which vehicles may be in the course of the operation process. The stochastic processes fulfilling the Markov property are essential in terms of applicability. According to Markov’s theory, the conditional probabilities of reaching the future states
X(
tz+1) result only from the current state
X(
tz) [
32]. Mathematically, this property is consistent with Equation (1) [
33,
34,
35]:
The literature is dominated by the division of Markov processes with regard to time and state space, which distinguishes four types of processes, i.e., processes:
Discrete in time and discrete in states;
Continuous in time and discrete in states;
Discrete in time and continuous in states;
Continuous in time and continuous in states.
In operation, the most frequently used models are based on discrete processes in states, developed for both discrete and continuous time [
8,
16,
24,
28,
29].
2.1. Markov Chains
The Markov chain assumes the discretization of time into specific Δ
t intervals, the width of which depends on the characteristics of the process, measurement technique, and, above all, the adopted modeling objective [
36]. With the increase in the dynamics of the process course, the possibility, and, at the same time, the necessity to perform frequent measurements and the focus on creating a very accurate model, the values of time Δ
t decrease. The dynamics of changes in the operational states identified in the phase space for the operation of light utility vehicles determine the assumption of the duration of moments Δ
t for the time interval equal to 1 min. Increasing this value could cause the undesirable omission of registering the occurrence of conditions, which are usually short-lived. At the same time, reducing the time intervals is practically impossible due to recording the course of operation processes of vehicles operating in military transport systems.
Constructing the Markov Chain Model based on an empirical process flow requires acquiring data on interstate transitions. For this purpose, it is reasonable to create a matrix of the number of interstate transitions according to the Formula (2):
The values of the N matrix correspond to the total number of observed interstate transitions in the analyzed period of the process implementation, where nij is the transition from the i state to the j state.
For a homogenous Markov chain, the conditional probability
pij of transition from state
i to state
j in one step is the same for every moment
t. The homogeneity of the process indicates the invariability of the rules affecting the state changes at any time of its implementation. If the analyzed realizations of the process are included in the same phase of operation, then the course of the process should be homogenous. The probability values of the conditional interstate transitions are presented by means of the stochastic matrix
P, according to the Formula (3) [
33,
37,
38]:
provided that the following formula [
37] is fulfilled:
The probabilities of the interstate transitions of the
P stochastic matrix can be obtained using the values of the
N interstate number matrix by estimation [
31,
35,
39] according to the relationship:
where the standard error of the conditional probability estimation [
40,
41] is calculated according to the formula:
The values of ergodic probabilities
πj are calculated by solving the following matrix Equation (7) [
37]:
assuming that the normalization condition is met, according to the formula:
2.2. Markov and Semi-Markov Processes
Discrete Markov models in states and continuous in time allow for the analysis of the operation process under constant supervision and monitoring of the course of changes in operational states. This approach excludes the influence of the size of the time moments Δ
t on the values of the instantaneous and ergodic characteristics of the process. In principle, the change of state from
Si to
Sj can take place at any time during the process. It is also assumed that only one state change can occur at any time
t. The Markov process assumes the presence of exponential distributions of the characteristics of individual states describing the analyzed process [
42,
43,
44].
The transition intensity matrix
Λ is the quantitative characteristic of the Markov process:
whose elements meet the following dependencies:
All elements of the matrix on the main diagonal have non-positive values, while all other elements are non-negative and the sum of all elements for each row of the transition intensity matrix is equal to 0.
In the operation processes of objects, the estimators of the values of the elements
λij of the interstate intensity matrix are the reciprocal of the average residence times in the
Si state before the transition to the
Sj state. On the other hand, the value of
λii is taken as the reciprocal of the sum of the remaining elements in the
i row. The presented description of the estimation of the intensity matrix elements can be written using the relationship:
where
Tij is the average transition time from state
Si to state
Sj.
The condition of exponential distributions of the stochastic process characteristics narrows the spectrum of applications of the Markov model in continuous time. Some characteristics of the operation process may not meet it. From the point of view of the reliability of the mapping, this excludes the possibility of applying the Markov model [
29,
45]. The generalization of the Markov process is the semi-Markov process, which does not require the fulfilment of the condition of exponential distributions of interstate transition times. In the semi-Markov process, the durations of states are independent random variables with any distribution function [
27,
43,
46].
The basic characteristic of the semi-Markov process is the matrix of the renewal kernel
Q(
t), the elements of which are the products of the probability
pij and the transition between the states
Si and
Sj and the distribution function of the conditional duration distribution of the state
Si before the transition to
Sj, according to the equation [
30,
47]:
wherein:
where
pij is the probability of transition from the
Si state to
Sj, and
Fij(
t) is the distribution function of the residence time in state
Si before the transition to state
Sj.
An embedded Markov chain is formulated for a semi-Markov process in continuous time, which represents changes in the process state without taking into account the residence times in individual states.
The embedded Markov chain assumes the possibility of transition from the
Si state to
Sj, assuming that
i ≠
j. The interstate transition probability matrix for such a chain can have non-zero elements only outside the main diagonal, which can be written by the formula:
If the embedded Markov chain is ergodic and there are expected
E(
Ti) values of the times in individual states, then the ergodic values of the probabilities
πj for the semi-Markov process can be determined using the following dependencies:
where
pi is the ergodic probability of the embedded Markov chain for state
Si, and
Tij is the average transition time from state
Si to state
Sj.
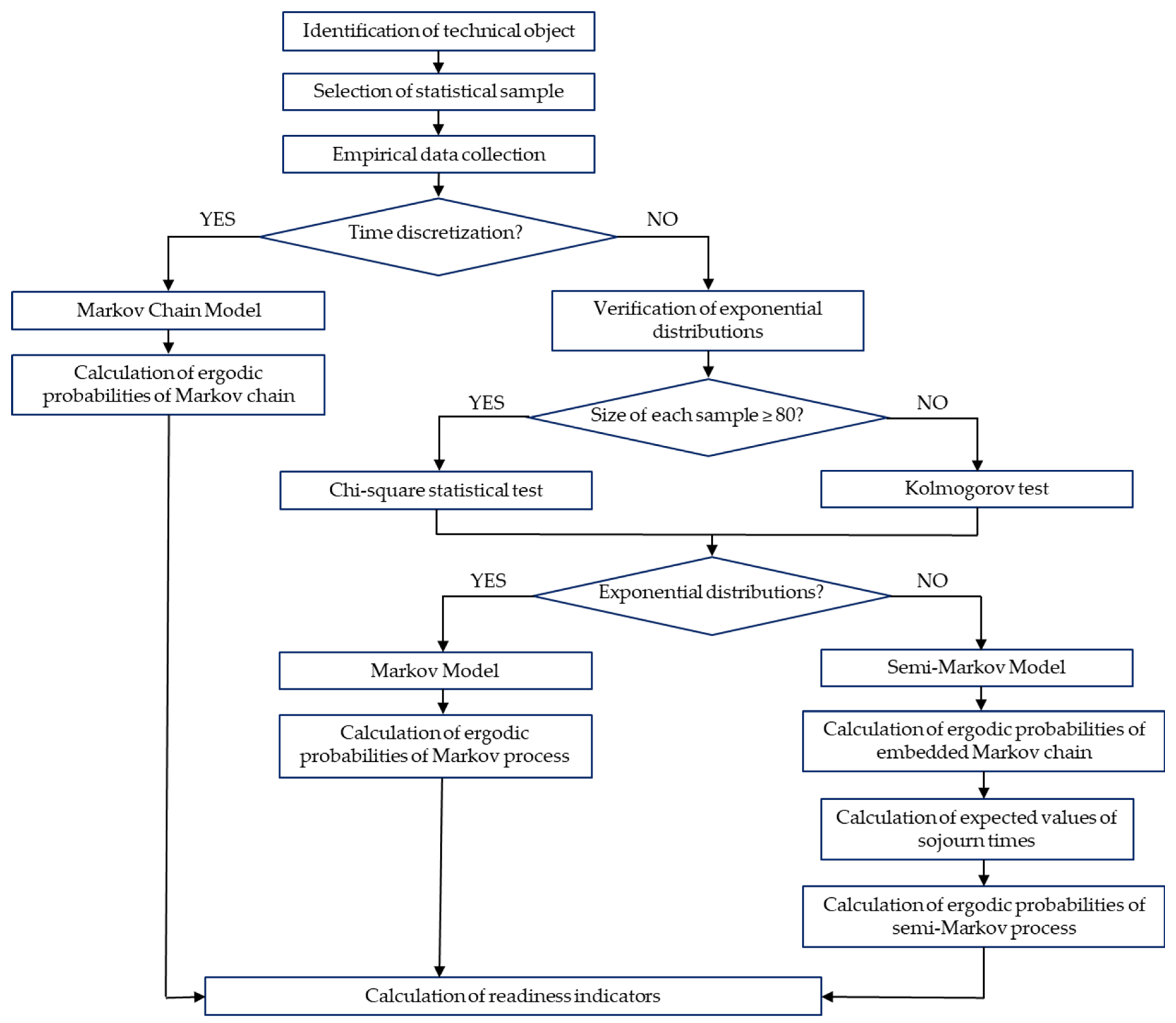
Figure 1 shows a block diagram of creating a model of the exploitation process based on the theory of Markov and semi-Markov. The first stages of stochastic modeling are the identification of the technical object, the selection of a statistical sample, and the collection of empirical data in the form of databases. Then a choice is made between discrete-time and continuous-time models. In the case of discrete-time, a model is constructed based on a Markov chain. When analyzing a process in continuous time, verification of the exponential distribution of time characteristics, a condition for the possibility of using a Markov model, is carried out. Two non-parametric consistency tests are proposed as statistical verification tools: χ
2 and Kolmogorov, depending on the size of the research samples. For empirical data containing statistical samples less than 80, the Kolmogorov test is recommended, while otherwise, there is no contraindication to using the χ
2 test [
48,
49]. For processes satisfying the condition of the exponential distribution, Markov models are used, while otherwise, a semi-Markov model is an appropriate solution. The calculation of the values of operating indicators is carried out on the basis of the ergodic probabilities of the corresponding model.
2.3. Functional Readiness, Technical Efficiency and Technical Suitability
Functional readiness is usually understood as the ability of a technical system or object to undertake and perform tasks consistent with its intended use in the required time [
50,
51]. The availability index Kr reflects the quantitative characteristic of functional availability, which for the Markov model is expressed as the sum of the probabilities of ergodic operational states
k ∈
Sr, in which the object can start the task or is in the process of its implementation. The mathematical notation of this relationship is presented by the formula:
where
πk is the ergodic probability of the desired (from the standpoint of readiness) set of operational states
k ∈
Sr.
In functional readiness, the vehicle is technically fully operational, i.e., it has an adequate supply of fuel and consumables and is not being serviced. The functional availability indicator shows the share of time that can be allocated to the implementation of tasks by the technical object during its operation period.
The concept of technical efficiency refers to a wider set of operational states than in the case of functional availability. The technically efficient facility has a technical resource to perform the tasks. However, it may require refueling or short-term maintenance before or after use. For the Markov model, the technical efficiency coefficient
Ke is the sum of the ergodic probabilities of operational states
l ∈
Se in which the technical object has a technical service life and does not require periodic maintenance, which is shown in the relationship:
where
πl is the ergodic probability of the desired set of operational states
l ∈
Se.
Technical suitability expresses the condition of a technical object, in which it is not damaged, or there is no need to repair it. The technical suitability condition is an extension of the technical efficiency by the time needed to perform periodic maintenance in order to restore its technical life. The technical suitability index
Ks for the Markov model is therefore, the sum of the probabilities of ergodic operational states
m ∈
Ss, in which the object is not damaged. This is expressed in the equation:
where
πm is the ergodic probability of the set of operational states
m ∈
Ss.
There is the following relationship between the sets defining the states of functional readiness, technical efficiency and technical suitability:
4. Results and Discussions
4.1. Semi-Markov Model (SMM)
The embedded Markov chain in the semi-Markov process, in accordance with the adopted assumptions, does not allow for the possibility of returns (transition from the
Si state to the
Si state). This assumption adopts that every change of the process state is recorded, while its absence means that the object is in the
Si state before transitioning to the next
Sj state for a period of time equal to
Tij [
26,
28,
29,
30]. The matrix (27) shows the empirical numbers of transitions between particular exploitation states as a result of observation of the process. On the other hand, matrix (28) represents the probabilities of transitions between states estimated on the basis of the matrix of the number of transitions.
Table 5 summarizes the values of the standard error for the conditional probabilities (28) estimated on the basis of the matrix of the number of interstate transitions (27). According to Formula (6), with the increase in the number of transitions from the
Si state, the standard error
SE(
pij) decreases. For this reason, the values of the standard error are higher for operational states in which the technical object is relatively rare. Nevertheless, for all conditional probabilities, the
SE(
pij) did not exceed the value of 0.05 [
55,
56]. The result at this level is considered acceptable.
Figure 3 presents a graph illustrating possible transitions between states during the implementation of the operation process. According to the assumptions made for the embedded Markov chain, the fact that the object remains in the same state is not treated as a
Si →
Si transition. For this reason, the SMM model graph does not have connections coming from the
Si state and going directly to the
Si state. This means a lack of return to the same state, which is commonly used in modeling the operation processes.
Assuming that at t = 0, the vehicle is technically efficient and awaits the appearance of the task, it is possible to determine the instantaneous probabilities of the embedded Markov chain. This assumption reflects the initiation of the operation process for a vehicle included in the transport system. The instantaneous probabilities are the matrix product of the initial distribution matrix p0 and the n-th power of the conditional probability matrix P, where n corresponds to the number of transitions between states. The development of the dependence of the instantaneous probabilities on the number of interstate transitions allows us to determine the period after which their values stabilize at a certain level and the stochastic process reaches the equilibrium state.
Figure 4 and
Figure 5 show changes in the value of the instantaneous probabilities of the embedded Markov chain in the semi-Markov process. In the range from
t = 0 to
t = 30, there are fluctuations with a large amplitude of changes in the values, which decrease with time and after overcoming about 50 transitions, the probability values remain constant.
4.2. Ergodic Probabilities of SMM
The ergodic probabilities of the semi-Markov process are determined on the basis of the probabilities of the embedded Markov chain and the values of the expected time in individual states of the process. For the embedded Markov chain, the ergodic probabilities are computed using the matrix equation:
which can be written as a system of Equation (30) together with the condition (31) of system normalization:
After solving the system of equations, the values of ergodic probabilities
pj of the inserted Markov chain were obtained. The expected
E(
Tj) times of staying in individual operating states were determined as average values based on empirical data. The values of
pj and
E(
Tj) were used to calculate the values of ergodic probabilities in the semi-Markov model. The results of the conducted analyses are summarized in
Table 6.
The garage state S3 had the highest value of the ergodic probability of over 77%. On the basis of the calculated values of probabilities, it can be concluded that the trucks and passenger cars stay together in other states for approximately 13% of the time during the entire three-year research period. The S9 state also obtained a significant level of ergodic probability, which indicates that the vehicles remain in a state of waiting for repair for almost 9% of their operational time. The remaining operational states obtained probability values below 1% and do not have a significant impact on the availability rates.
4.3. Calculations of Indicators in SMM
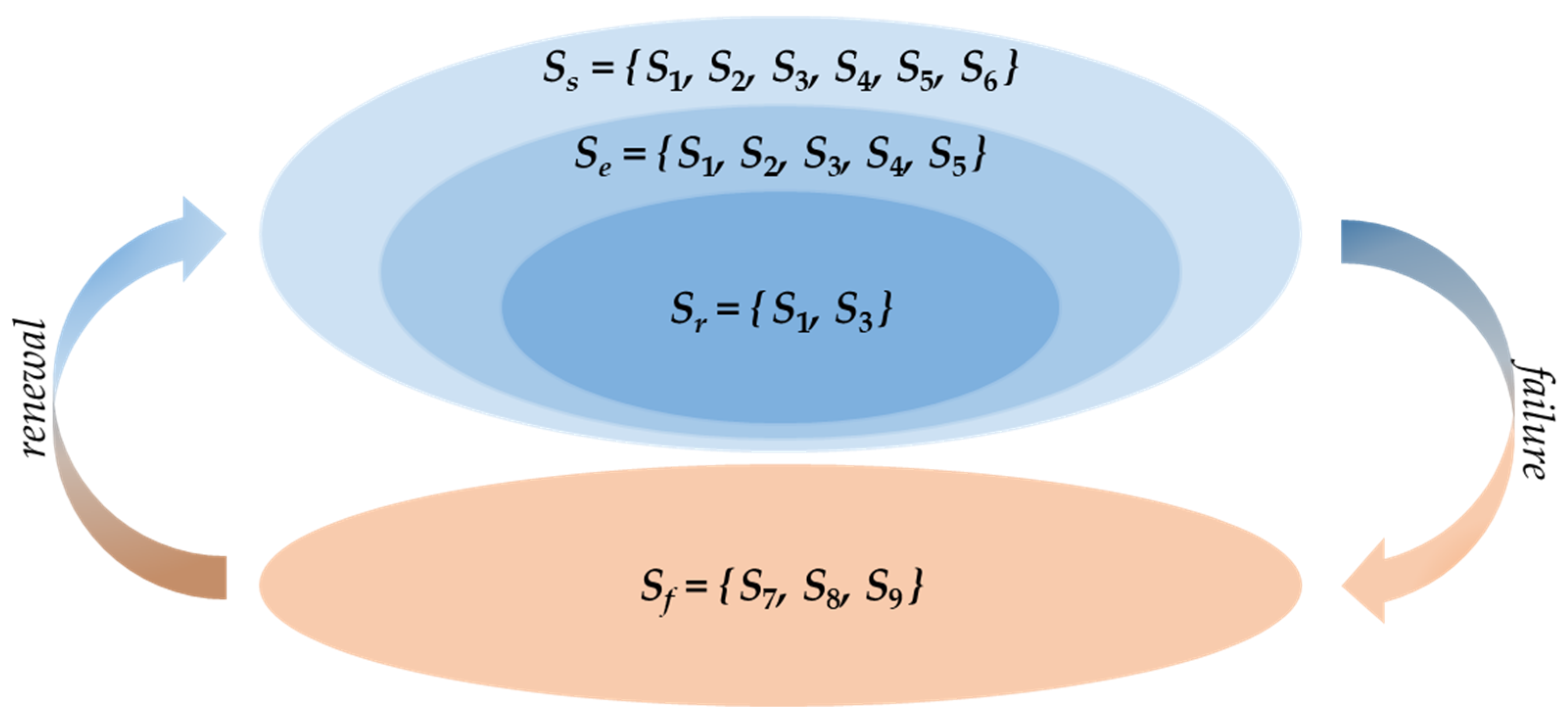
In the nine-state exploitation model, state subsets were distinguished corresponding to the functional readiness
Sr, technical efficiency
Se and technical suitability
Ss. The mathematical notation is presented by the Formulas (32)–(34):
Functional readiness corresponds to the vehicle being in the task (
S1) or garage (
S3) state. Technical efficiency extends the set of these states with fuel refilling (
S2) and the implementation of maintenance before starting the task (
S4) and after its completion (
S5). On the other hand, technical suitability also takes into account the implementation of periodic maintenance (
S6), the purpose of which is to restore the technical service life. The graphical diagram of the division of the operating conditions set into individual subsets is shown in
Figure 6.
For such defined subsets, the values of functional availability, technical efficiency and technical suitability indicators were calculated. The results are presented in
Table 7. The values of all three indicators are similar, which means a small share of the time of current and periodic maintenance and refueling in the entire test period.
The high probability value of the S9 ergodic state has the greatest impact on the reduction of the indicators of functional availability, technical efficiency and technical suitability of vehicles. This state corresponds to the situation when the vehicle has suffered a breakdown, is out of order and requires repair. Due to the lack of technical possibilities, it is not in the repair state (S7) and is not in the diagnosis phase (S8). The main reasons for such a situation are logistic delays related to the limited availability of spare parts and the lack of qualified technical personnel within the specified time.
4.4. Sensitivity Analysis of SMM
The calculated ergodic probability
π9 of the
S9 state has the strongest impact on the values of the
Kr,
Ke and
Ks indicators. Due to this fact, the sensitivity analysis of the SMM model was carried out in order to investigate the impact of the presence of objects in the
S9 state on the ergodic probabilities and technical readiness rates. The parameter against which the variability analysis was performed is the expected value of the duration of the
S9 state. For the change of this parameter, expressed as a percentage and amounting to Δ
E(
T9), the values of the ergodic probabilities of the semi-Markov process can be determined using the relationship:
The undoubted advantage of the SMM model is the ability to perform a sensitivity analysis for a wide range of changes in the
E(
T9) parameter without the need to solve many matrix equations.
Table 8 shows the results of the analysis for selected Δ
E(
T9) values.
Figure 7 presents a graph of changes in ergodic probabilities for continuous changes in the value of Δ
E(
T9).
On the basis of the determined ergodic probabilities, the possibilities of improving the values of the readiness ratios were carried out at the assumed levels of reduction of the time spent in the state of incapacity and waiting for repair. The results are presented in
Table 9 and
Figure 8.
Reducing the waiting time for repairs by 50% would result in an increase in the values of the Kr, Ke and Ks indicators to the level of about 0.95, which at the same time means their improvement by over 0.04. The sensitivity analysis of the SMM model was carried out with regard to the impact of changes in the expected value of the time of staying in the S9 state.
4.5. Markov Model (MM)
Markov models, assuming exponential distributions of time characteristics, often use stochastic models to describe the operation processes of machines, devices and technical systems. For small deviations of empirical distributions of interstate times from the theoretical assumptions of the Markov theory, the results obtained for Markov and semi-Markov models may be similar or even negligibly small.
For the analyzed sample of means of transport, the non-parametric Kolmogorov test showed grounds for rejecting the null hypothesis about exponential distributions. However, the authors of the publication conducted an analysis of the applicability of the Markov model as a simplification of the generalized SMM presented in
Section 4.1,
Section 4.2,
Section 4.3 and
Section 4.4. The basic characteristic of the Markov model is the matrix of interstate transition intensity
Λ. In the case study under consideration, the value of the
Λ matrix presented in the matrix, which were estimated on the basis of the mean values of the transition times between the states according to the Equations (11) and (12).
Ergodic probabilities of the Markov process for the entire set of operational states are calculated by solving the matrix Equation (38) together with the system normalization condition (39).
Mathematica and MS Excel software were used for the presented calculations. The results for MM are summarized in
Table 10 and
Figure 9, comparing them with the values of ergodic probabilities obtained for SMM. Percentage differences between the models reached significant values, with the most similar probabilities occurring for the
S2 state and differing by over 41.0%. The greatest discrepancies in the results occurred for the
S6 state, for which the ergodic probability obtained in MM was as much as 1153.69% higher than in SMM. In addition, the
S6,
S7,
S8 and
S9 states, which are a subset of the technical inoperability and failure states, achieved positive differences. The use of MM to evaluate the operation process would result in a significant reduction of the values of the
Kr,
Ke, and
Ks indices, inconsistent with the actual state.
Compared to SMM, the Markov model achieved a mean absolute percentage error (MAPE) of 351.92%. Therefore, the hypothesis about the possibility of using the Markov process to describe state changes by the analyzed technical objects in the considered nine-element set of operational states should be unambiguously rejected.
5. Conclusions
The theory of Markov processes was used to model the operation of light utility vehicles. The paper presents a semi-Markov model that allows for the assessment the technical readiness of means of transport operating in a real system. On the basis of the systems of Chapman–Kolmogorov equations and the values of the expected times of stay in operating states, the values of the ergodic probabilities of the process were determined. The main reason for the reduction of functional availability, technical efficiency and technical suitability indicators was the high probability value of the S9 state (Awaiting repair). This indicates the occurrence of significant delays in the implementation of repairs of damaged vehicles. Therefore, in eliminating the reasons for the presence of technical objects in the S9 state, the operating system does not have sufficient technical resources to carry out repairs without unnecessary time delay. Repair delays are mainly caused by the unavailability of spare parts and a shortage of qualified technical personnel. In order to maximize the technical readiness of vehicles, it is necessary to focus on improving the organization of the spare parts delivery system, which will significantly reduce the time spent by technical facilities in the S9 state.
For the current state of the operation system, the functional availability ratio Kr has reached the value of 0.907334, which should be interpreted as follows: for more than 90% of the duration of the operation process, vehicles in good technical condition await the appearance of a task or are in the process of its implementation. A slight difference between the technical efficiency index Ke and the functional readiness index Kr indicates that the process of refueling and servicing is carried out efficiently. The aforementioned processes constitute a set of activities preparing a technically efficient vehicle to perform the task, as well as control and check after its completion. On the other hand, the technical suitability index Ks amounting to 0.911343 means that for over 91% of the duration of the operation process, the vehicles are fit for use. Its high value indicates a well-thought-out and proper implementation of the exploitation strategy. The small value of the ergodic probability for the S6 state resulted in a slight difference between the technical efficiency index Ke and the technical suitability index Ks. The above-mentioned results show that the capabilities of the technical subsystem, which carries out the periodic maintenance process, are adjusted to the requirements of the plan-preventive strategy used.
The ergodic probability π2 of 0.000292 and the expected residence time in the S2 state of 4.60 (min) indicate an efficiently implemented refueling process. For the current level of intensity of use of vehicles, in which over 13.0% of the operation time is during the implementation of transport tasks, the technical system provides sufficient resources of diesel oil and appropriate distribution equipment.
Despite the assumed high level of readiness, efficiency and suitability indicators of the tested military vehicles, an attempt was made to optimize the process by determining the impact of a potential reduction in the duration of the S9 state, equipped with logistic delays occurring in the operation system. An analysis of the optimization possibilities was carried out on the basis of changes in the expected time of stay in the S9 state based on analytical relationships, which enabled the analysis based on a continuous reduction of changes in E(T9) in the percentage range of 0.0–90.0%. As a result, the reduction of the expected time of the vehicle’s stay in the S9 state by 50.0% resulted in the increase of all indicators by over 0.041, and the reduction by 90% increased the values of the indicators by over 0.077.
The attempt to use the Markov process, despite not meeting the condition of exponential time characteristics, showed significant discrepancies between MM and SMM. The high degree of mismatch between the Markov model and the actual process is evidenced by the value of the MAPE error amounting to 351.92%. Therefore, it is inappropriate to use MM to describe the nine-state process of operation of heavy goods vehicles operating in the military transport system. The performed non-parametric Kolmogorov test resulted in the rejection of the hypothesis concerning the compatibility of empirical distributions of the duration of individual states with the theoretical exponential distribution.
The proposed method allows a detailed analysis of vehicle operation as a stochastic process with a multi-state phase space. The unquestionable advantage of the nine-state semi-Markov model is the possibility of evaluating the operation process using indicators of functional readiness, efficiency, and technical efficiency, calculated based on the basis of ergodic probabilities of the process. Additionally, the model sensitivity analysis makes it possible to determine the impact of reducing the values of expected vehicle dwell times in each state on the efficiency of the operation process. However, a disadvantage of the proposed method is the inability to predict the values of indicators for the increased or decreased intensity of vehicle use expressed by means of average daily mileage. This is due to the condition of determining the characteristics of all states in the same time domain.
The proposed methodology for creating stochastic exploitation models can be applied to a wide range of facilities and technical devices. The developed model can be used to analyze and evaluate the operation process of other vehicles operating in technical systems with an analogous or similar operation strategy.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}