Author Contributions
Conceptualization, G.D. and Y.Z.; data curation, W.G. and G.D.; formal analysis, W.G.; funding acquisition, G.D.; investigation, W.G. and G.D.; methodology, W.G. and G.D.; project administration, G.D.; resources, G.D.; software, W.G.; supervision, Y.Z.; validation, G.D., Y.Z., T.P. and N.L.; visualization, W.G.; writing–original draft, W.G.; writing–review and editing, W.G., G.D., T.P. and N.L. All authors have read and agreed to the published version of the manuscript.
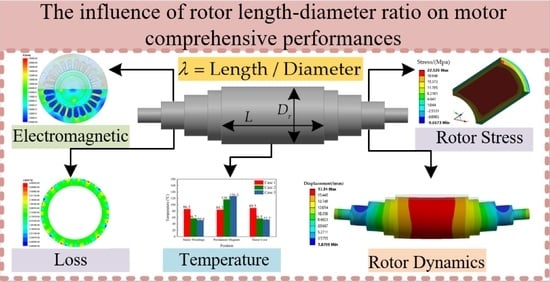
Figure 1.
Comprehensive characteristics comparative analysis and design process.
Figure 1.
Comprehensive characteristics comparative analysis and design process.
Figure 2.
Radial air−gap flux density under no load and rated load: (a) no-load; (b) rated-load.
Figure 2.
Radial air−gap flux density under no load and rated load: (a) no-load; (b) rated-load.
Figure 3.
Rotor eddy-current losses on the magnets under no load and rated load: (a) no-load; (b) rated load.
Figure 3.
Rotor eddy-current losses on the magnets under no load and rated load: (a) no-load; (b) rated load.
Figure 4.
Effect of air-gap length on rotor eddy-current losses under no load and rated load.
Figure 4.
Effect of air-gap length on rotor eddy-current losses under no load and rated load.
Figure 5.
Magnetic flux density and lines distributions of two-pole motor with the stator outer diameter 157 mm.
Figure 5.
Magnetic flux density and lines distributions of two-pole motor with the stator outer diameter 157 mm.
Figure 6.
Magnetic flux density and lines distributions of two-pole and four−pole motors at no-load: (a) two-pole motor; (b) four-pole motor.
Figure 6.
Magnetic flux density and lines distributions of two-pole and four−pole motors at no-load: (a) two-pole motor; (b) four-pole motor.
Figure 7.
The rotor magnet eddy-current density distribution of two-pole and four-pole motors under rated load: (a) two-pole motor; (b) four-pole motor.
Figure 7.
The rotor magnet eddy-current density distribution of two-pole and four-pole motors under rated load: (a) two-pole motor; (b) four-pole motor.
Figure 8.
Radial air-gap flux density of two-pole and four−pole motors under no load: (a) radial air-gap flux density with mechanical angle; (b) Fourier transforms.
Figure 8.
Radial air-gap flux density of two-pole and four−pole motors under no load: (a) radial air-gap flux density with mechanical angle; (b) Fourier transforms.
Figure 9.
Radial air-gap flux density of two-pole and four-pole motor under rated load: (a) radial air-gap flux density with mechanical angle; (b) Fourier transforms.
Figure 9.
Radial air-gap flux density of two-pole and four-pole motor under rated load: (a) radial air-gap flux density with mechanical angle; (b) Fourier transforms.
Figure 10.
Line to line back−EMF of two-pole and fours-pole motor at no load: (a) line to line back-EMF waveform; (b) Fourier transform.
Figure 10.
Line to line back−EMF of two-pole and fours-pole motor at no load: (a) line to line back-EMF waveform; (b) Fourier transform.
Figure 11.
Magnetic flux density and lines distributions under different cases at rated load: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 11.
Magnetic flux density and lines distributions under different cases at rated load: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 12.
The line to line back-EMF and its Fourier transforms under the three cases at no load: (a) line to line back-EMF waveform; (b) Fourier transform results.
Figure 12.
The line to line back-EMF and its Fourier transforms under the three cases at no load: (a) line to line back-EMF waveform; (b) Fourier transform results.
Figure 13.
Radial air-gap flux density and Fourier transforms under three cases at no load and rated load: (a) radial air-gap flux density at no load; (b) Fourier transforms results at no load; (c) radial air-gap flux density at rated load; (d) Fourier transforms results at rated load.
Figure 13.
Radial air-gap flux density and Fourier transforms under three cases at no load and rated load: (a) radial air-gap flux density at no load; (b) Fourier transforms results at no load; (c) radial air-gap flux density at rated load; (d) Fourier transforms results at rated load.
Figure 14.
Rotor eddy-current density in three cases at rated load: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 14.
Rotor eddy-current density in three cases at rated load: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 15.
Eddy-current losses in the three cases at rated load.
Figure 15.
Eddy-current losses in the three cases at rated load.
Figure 16.
Stator iron-core losses in the three cases at rated load.
Figure 16.
Stator iron-core losses in the three cases at rated load.
Figure 17.
Air-friction losses in the three cases at rated speed.
Figure 17.
Air-friction losses in the three cases at rated speed.
Figure 18.
Sleeve Von-Mises stress distribution under the three cases at rated speed at a cold state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 18.
Sleeve Von-Mises stress distribution under the three cases at rated speed at a cold state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 19.
Permanent magnets tangential stress distribution under the three cases at rated speed at a cold state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 19.
Permanent magnets tangential stress distribution under the three cases at rated speed at a cold state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 20.
Permanent magnets radial stress distribution under the three cases at rated speed at a cold state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 20.
Permanent magnets radial stress distribution under the three cases at rated speed at a cold state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 21.
Sleeve Von−Mises stress distribution under the three cases at rated speed in a hot state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 21.
Sleeve Von−Mises stress distribution under the three cases at rated speed in a hot state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 22.
Permanent magnets’ tangential stress distribution under the three cases at rated speed at a hot state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 22.
Permanent magnets’ tangential stress distribution under the three cases at rated speed at a hot state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 23.
Permanent magnets’ radial stress distribution under the three cases at rated speed at a hot state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 23.
Permanent magnets’ radial stress distribution under the three cases at rated speed at a hot state: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 24.
Rotor dynamic characteristics under the three cases: (a) first-order mode for Case 1; (b) second-order mode for Case 1; (c) first-order mode for Case 2; (d) second-order mode for Case 2; (e) first-order mode for Case 3; (f) second-order mode for Case 3.
Figure 24.
Rotor dynamic characteristics under the three cases: (a) first-order mode for Case 1; (b) second-order mode for Case 1; (c) first-order mode for Case 2; (d) second-order mode for Case 2; (e) first-order mode for Case 3; (f) second-order mode for Case 3.
Figure 25.
Spiral water ducts for designed motor stator housing cooling system.
Figure 25.
Spiral water ducts for designed motor stator housing cooling system.
Figure 26.
The temperature distribution under the three cases at rated speed: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 26.
The temperature distribution under the three cases at rated speed: (a) Case 1; (b) Case 2; (c) Case 3.
Figure 27.
The temperatures on the different positions under the three cases at rated speed.
Figure 27.
The temperatures on the different positions under the three cases at rated speed.
Table 1.
Main parameters of the designed motor for HSPMM.
Table 1.
Main parameters of the designed motor for HSPMM.
| Parameters | Values |
|---|
| Output power (kW) | 60 |
| Rated rotating speed (rpm) | 30,000 |
| Rated load voltage (V) | 380 |
| Rated power factor | 0.98 |
| Stator slots | 24 |
| Carbon fiber sleeve thickness (mm) | 5 |
Table 2.
Electromagnetic characteristics under different air-gap lengths.
Table 2.
Electromagnetic characteristics under different air-gap lengths.
| Case | 1 | 2 | 3 | 4 |
|---|
| Air-gap length (mm) | 0.5 | 1.5 | 2.0 | 3.0 |
| Magnet thickness (mm) | 6.5 | 8 | 8.8 | 13 |
| No-load line back-EMF (V) | 500.93 | 497.70 | 490.46 | 488.13 |
| RMS current (A) | 94.35 | 95.25 | 95.13 | 94.21 |
| Cogging torque (%) | 2.70 | 2.20 | 1.93 | 1.67 |
| Efficiency (%) | 97.09 | 97.05 | 97.01 | 96.94 |
Table 3.
Electromagnetic performance comparative analysis under different slots/poles combination.
Table 3.
Electromagnetic performance comparative analysis under different slots/poles combination.
| Slots/Poles | Slot per Pole per Phase | Pole Pitch/Pitch | Winding Factor | Cogging Torque Period | Load Frequency |
|---|
| 24/2 | 4 | 12/11 | 0.949 | 24 | 500 Hz |
| 24/4 | 2 | 6/5 | 0.933 | 24 | 1000 Hz |
| 24/6 | 4/3 | 4/3 | 0.885 | 24 | 1500 Hz |
| 24/8 | 1 | 3/1 | 0.5 | 24 | 2000 Hz |
Table 4.
Structural parameters of two-pole and four-pole motors for HSPMM.
Table 4.
Structural parameters of two-pole and four-pole motors for HSPMM.
| Parameters | Two-Pole | Four-Pole |
|---|
| Power (kW) | 60 | 60 |
| Speed (rpm) | 30,000 | 30,000 |
| Frequency (Hz) | 500 | 1000 |
| Slot number | 24 | 24 |
| Stator outer diameter (mm) | 181 | 157 |
| Stator inner diameter (mm) | 89 | 89 |
| Rotor outer diameter (mm) | 86 | 86 |
| Effective core length | 110 | 110 |
Table 5.
Electromagnetic characteristics comparison of two-pole motor and four-pole motor for HSPMM under rated load.
Table 5.
Electromagnetic characteristics comparison of two-pole motor and four-pole motor for HSPMM under rated load.
| Parameters | Two-Pole | Four-Pole |
|---|
| RMS current (A) | 95.38 | 95.25 |
| Line back-EMF (V) | 497.83 | 497.70 |
| Torque (Nm) | 19.10 | 19.11 |
| Stator-teeth flux density (T) | 1.04 | 1.04 |
| Stator-yoke flux density (T) | 1.31 | 1.31 |
| Thermal load (A2/mm3) | 168.8 | 162.07 |
| Power density (kW/kg) | 2.66 | 4.10 |
| Materials of stator | DW310-35 | DW310-35 |
| Iron loss density (W/kg) | 20.28 | 41.85 |
| Stator-core loss (W) | 457.581 | 611.792 |
Table 6.
Structure parameter value comparison of stator winding coils for HSPMM.
Table 6.
Structure parameter value comparison of stator winding coils for HSPMM.
| Parameters | Two-Pole Motor | Four-Pole Motor |
|---|
| Coils half-turn length (mm) | 299.492 | 197.258 |
| Total winding weight (kg) | 22.5634 | 14.6193 |
| Armature core steel consumption (kg) | 24.1621 | 17.4648 |
Table 7.
Performance of permanent magnet materials for HSPMM.
Table 7.
Performance of permanent magnet materials for HSPMM.
| Parameters | NdFeB | SmCo |
|---|
| Residual flux density | | |
| Coercive force | | |
| (BH)max | | |
| Density (kg/m3) | 7400 | 8300 |
| ) | 8.9 | 11 |
| Poisson ratio | 0.27 | 0.24 |
| Working temperature | | |
| Coefficient of the remanent | | |
| Tensile strength (MPa) | 80 | 35 |
Table 8.
Structural parameters of the rotor shape for HSPMM under three cases.
Table 8.
Structural parameters of the rotor shape for HSPMM under three cases.
| Parameters | Case 1 | Case 2 | Case 3 |
|---|
| Effective core length (mm) | 55 | 110 | 200 |
| Air-gap length (mm) | 2 | 2 | 2 |
| Stator outer diameter (mm) | 203.6 | 165.4 | 131.1 |
| Stator inner diameter (mm) | 114 | 92.6 | 73.4 |
| Rotor outer diameter (mm) | 110 | 88.6 | 69.4 |
| Length–diameter ratio | 0.5 | 1.24 | 2.88 |
| Sleeve thickness (mm) | 5 | 5 | 5 |
| Slots/poles combination | 24/4 | 24/4 | 24/4 |
Table 9.
Structure parameters of the rotor shape for HSPMM under the three cases.
Table 9.
Structure parameters of the rotor shape for HSPMM under the three cases.
| Parameters | Measurement | Calculation |
|---|
| Power (kW) | 60 | 60 |
| Back-EMF (V) | 520 | 523 |
| ) | 60.9 | 56.7 |

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}