
A Novel Hybrid MPPT Technique Based on Harris Hawk Optimization (HHO) and Perturb and Observer (P&O) under Partial and Complex Partial Shading Conditions


 , ,
, ,  and
and 
Abstract
:1. Introduction
- It uses a single constraint to control the exploration exploitation phase.
- It tracks the global maxima with 100.03. It needs fewer iterations to find the global maxima, and it’s settling time is lowest.
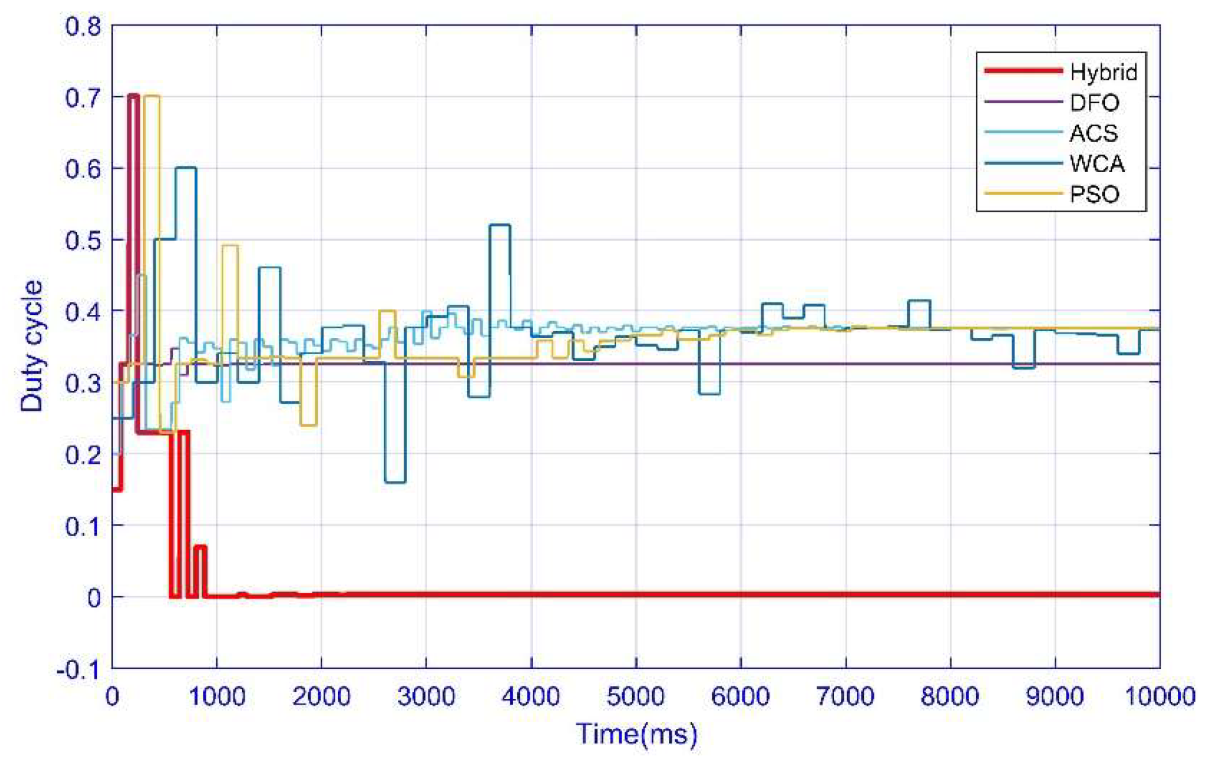
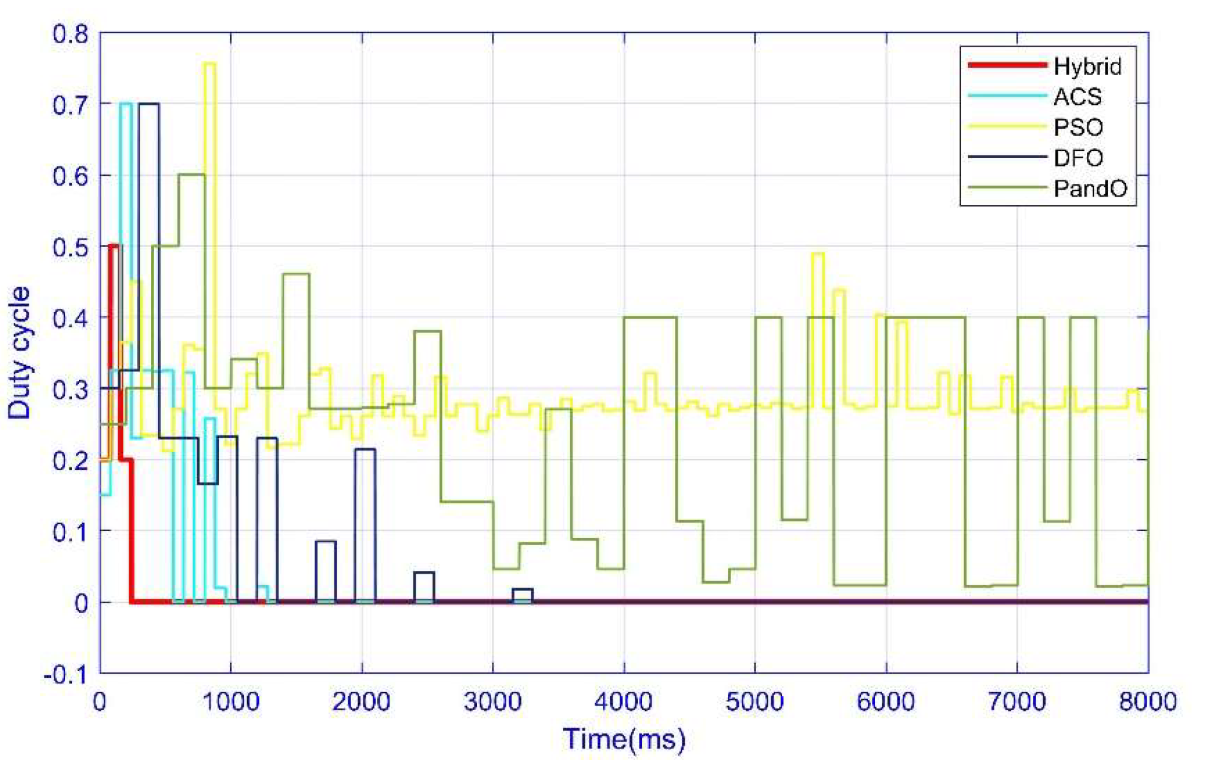
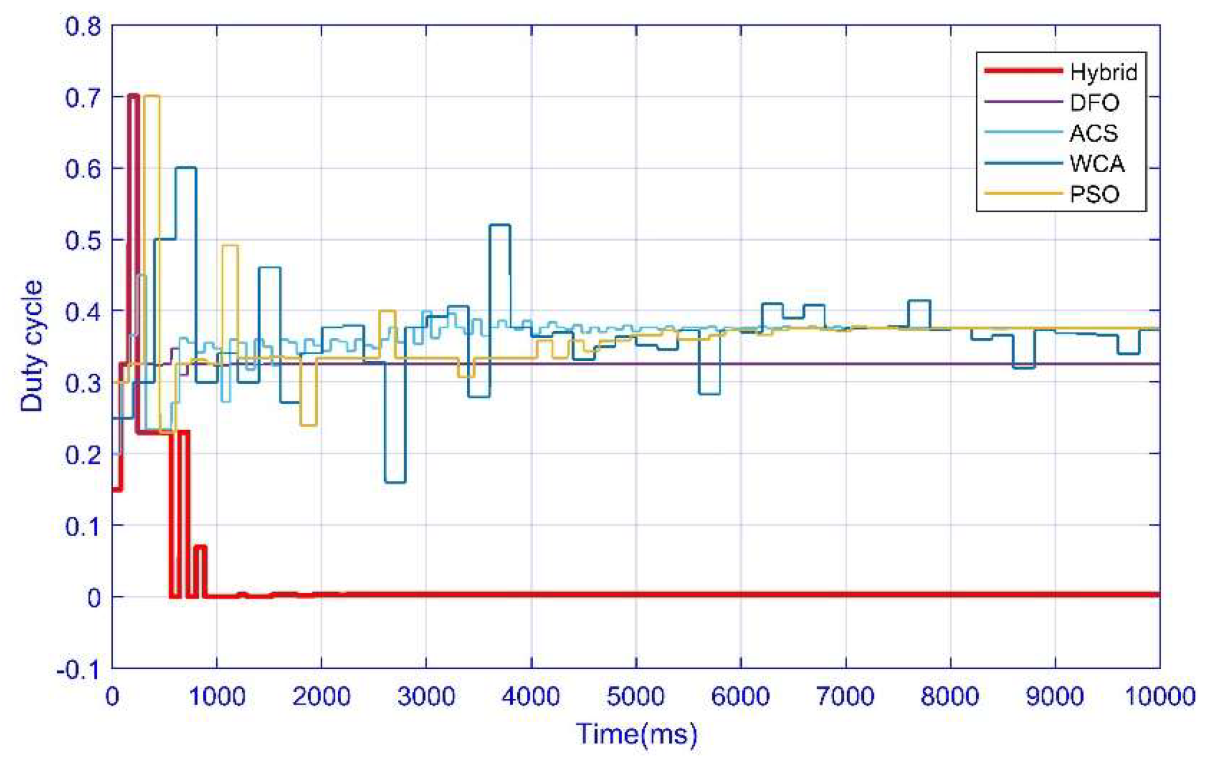
- The ease zone borderline allows the hybrid particles to stay in stationary oscillation, the result of which is that the iteration cycles are nil. This property is not present in PSO, ACS, etc., which causes a loss in power and unwanted fluctuations.
- Because of the efficiently planned structural comprehensive model of hawks, it can efficiently deal with complex PS. The power-convergence efficacy is up to 98.9%, and the steady-state fluctuation is compacted to zero at the global MPP.
- The well-ordered model allows for the fast apprising of the velocity position of hawks, which is essential for high efficiency in maximum PPT problems.
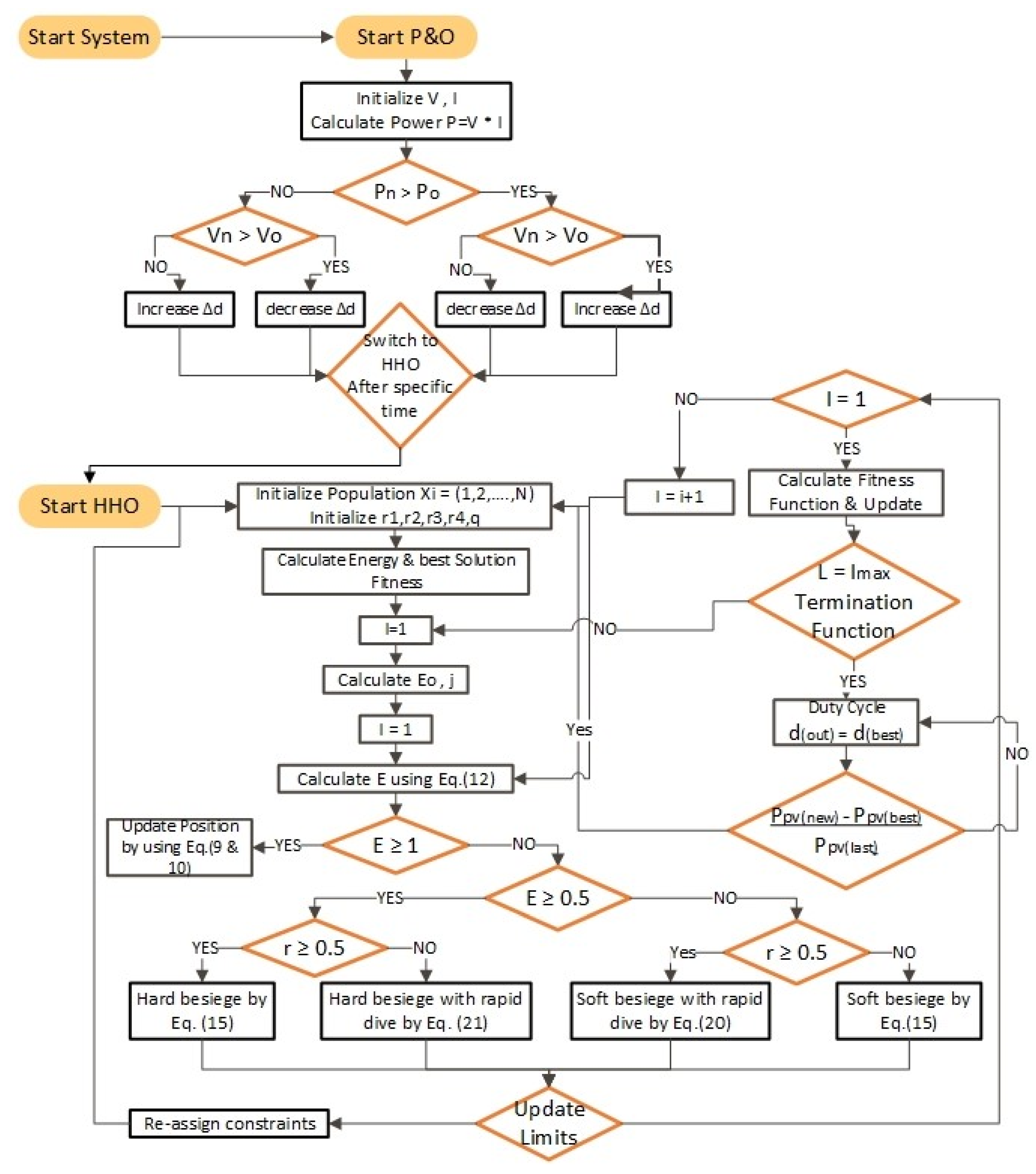
- A hybrid technique is implemented by using conventional P&O and HHO in order to minimize tracking time and also to improve efficiency.
- A mathematical model is implemented to detect the uniform, PS, and CPS conditions in a PV system.
- Four different cases are developed to identify the accuracy and response time of the proposed technique.
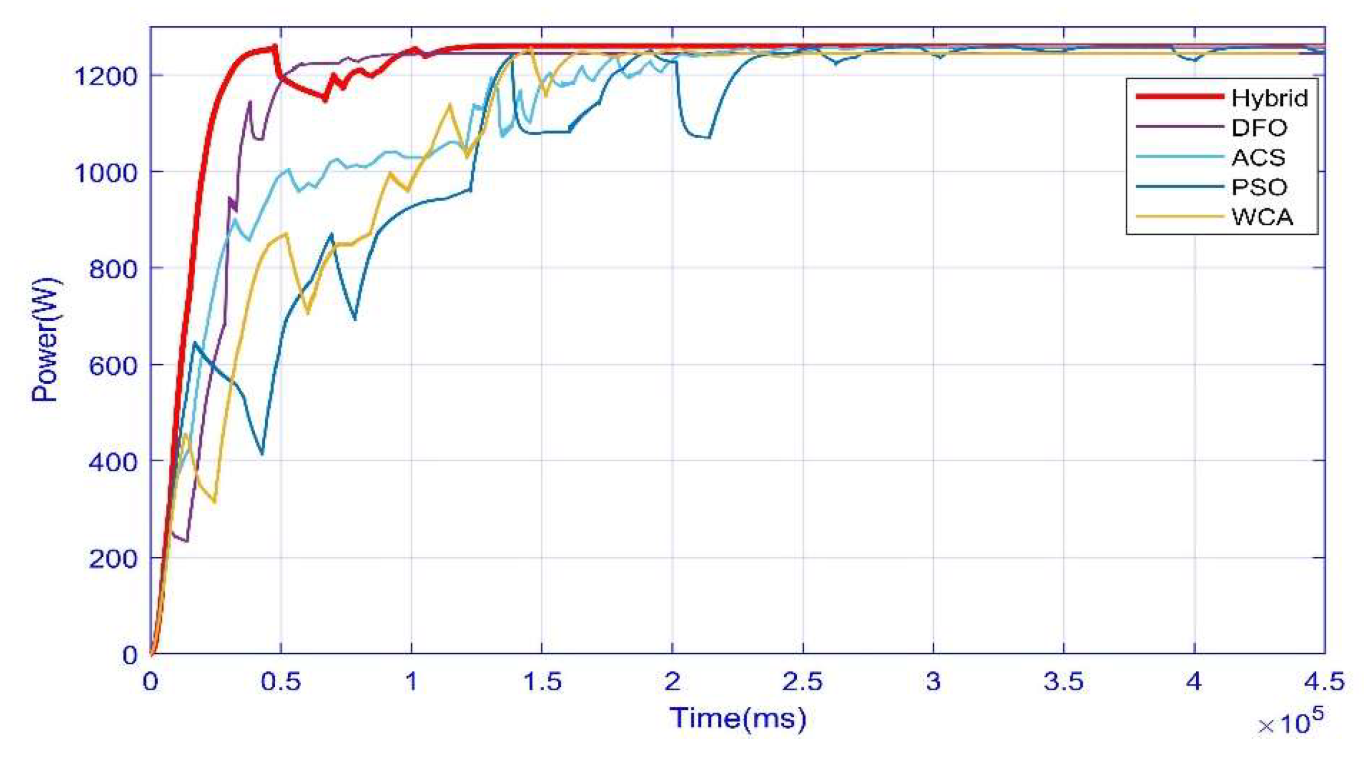
- To check the robustness of the proposed hybrid technique, it is compared with five previously implemented techniques, i.e., DFO, PSO, WCA, ACS, and P&O.
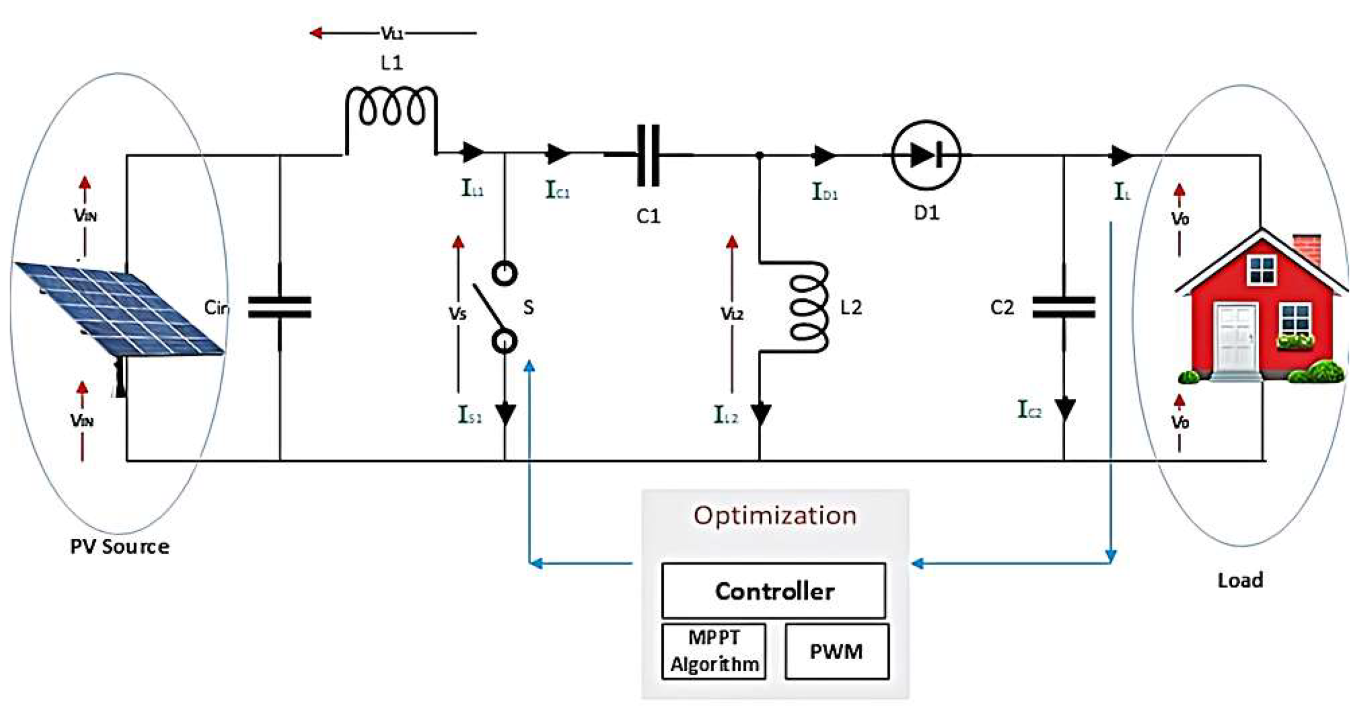
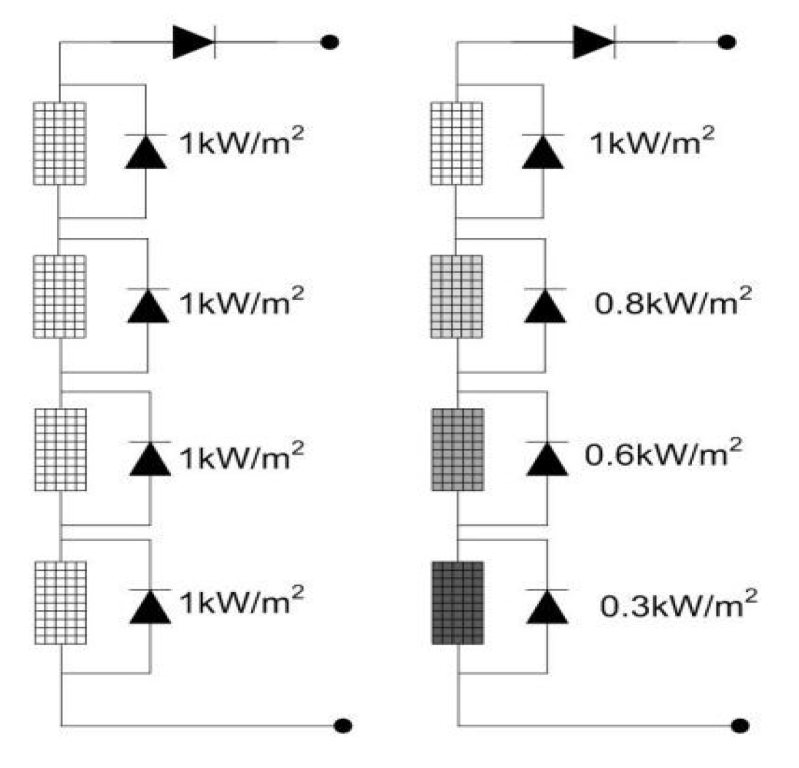
2. Materials and Methods
3. Results and Discussion
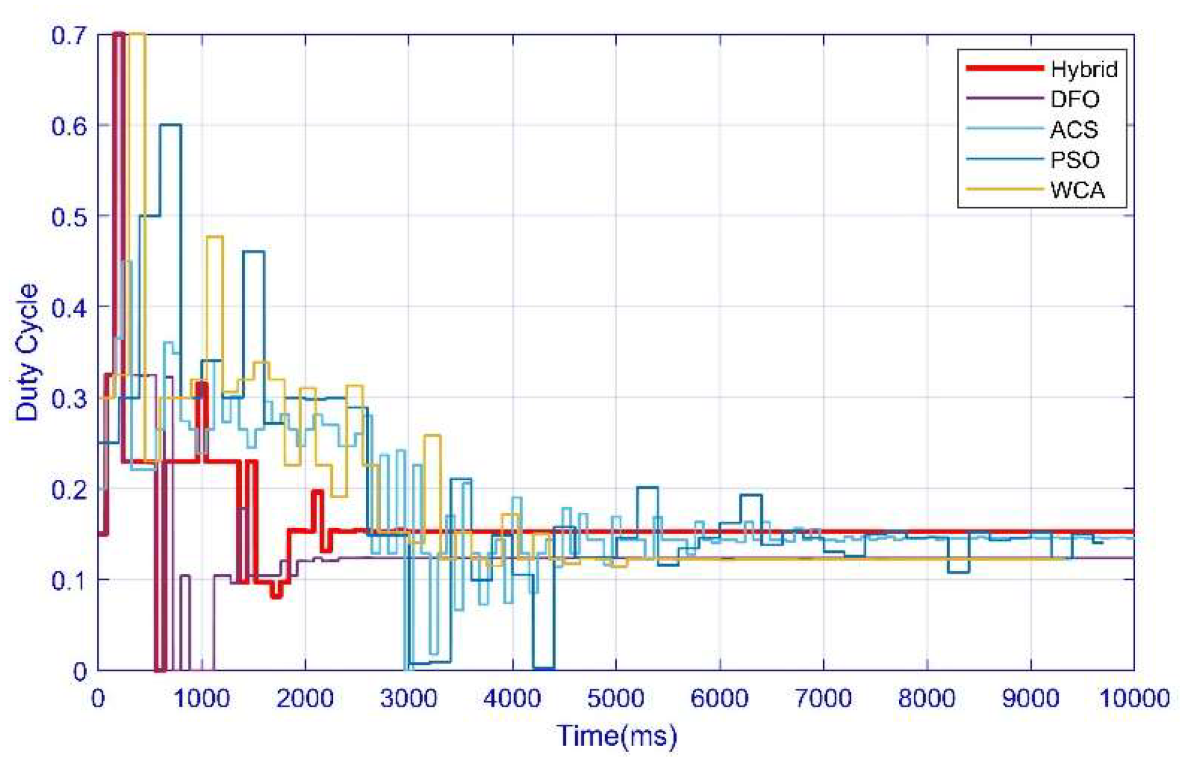
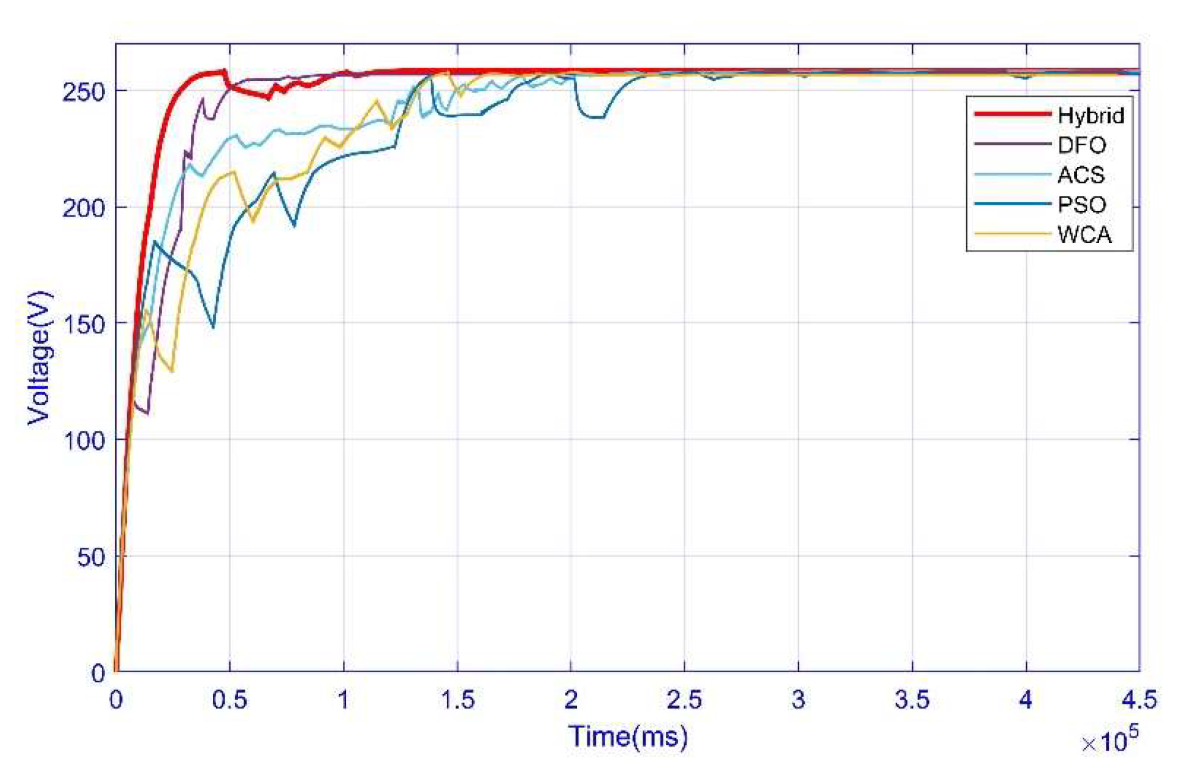
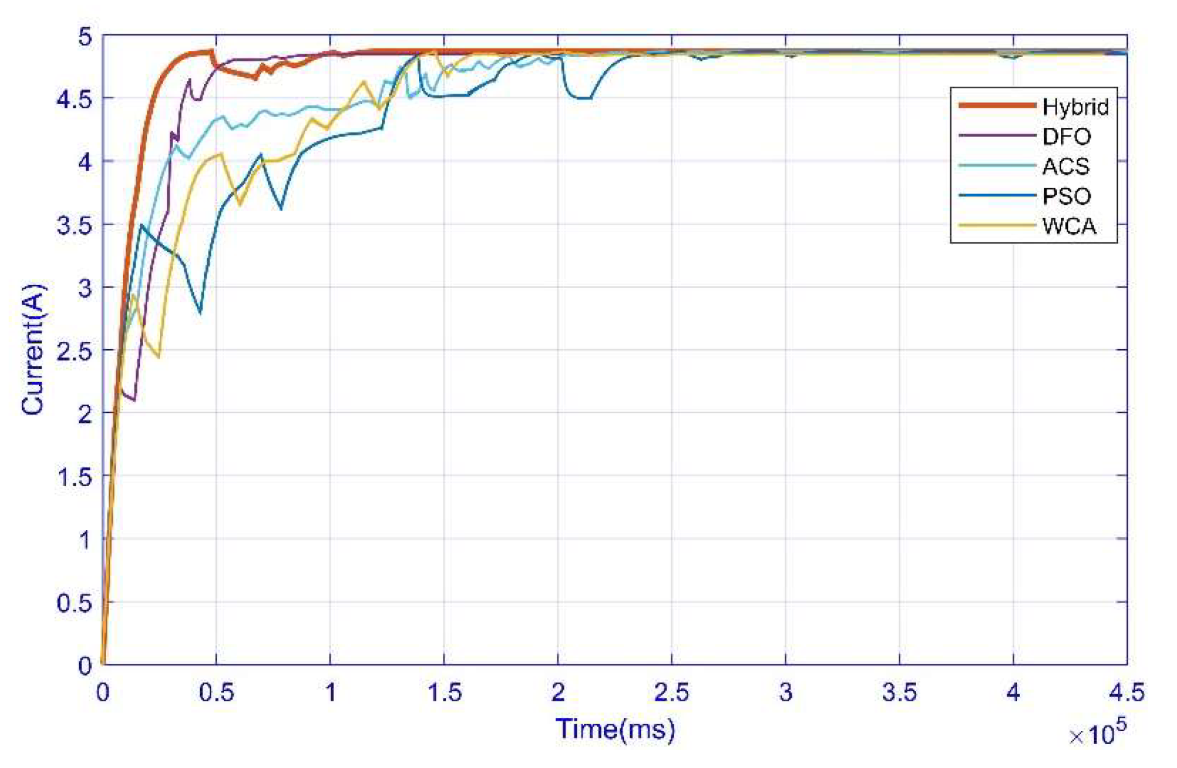
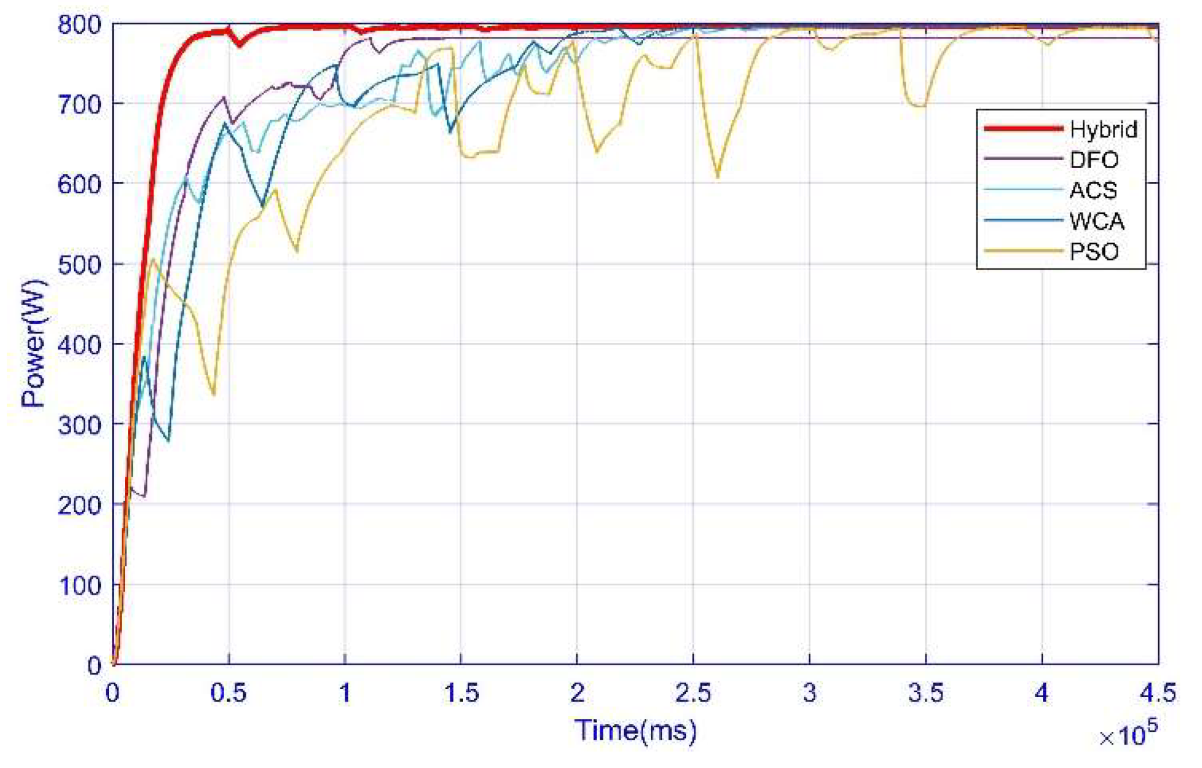
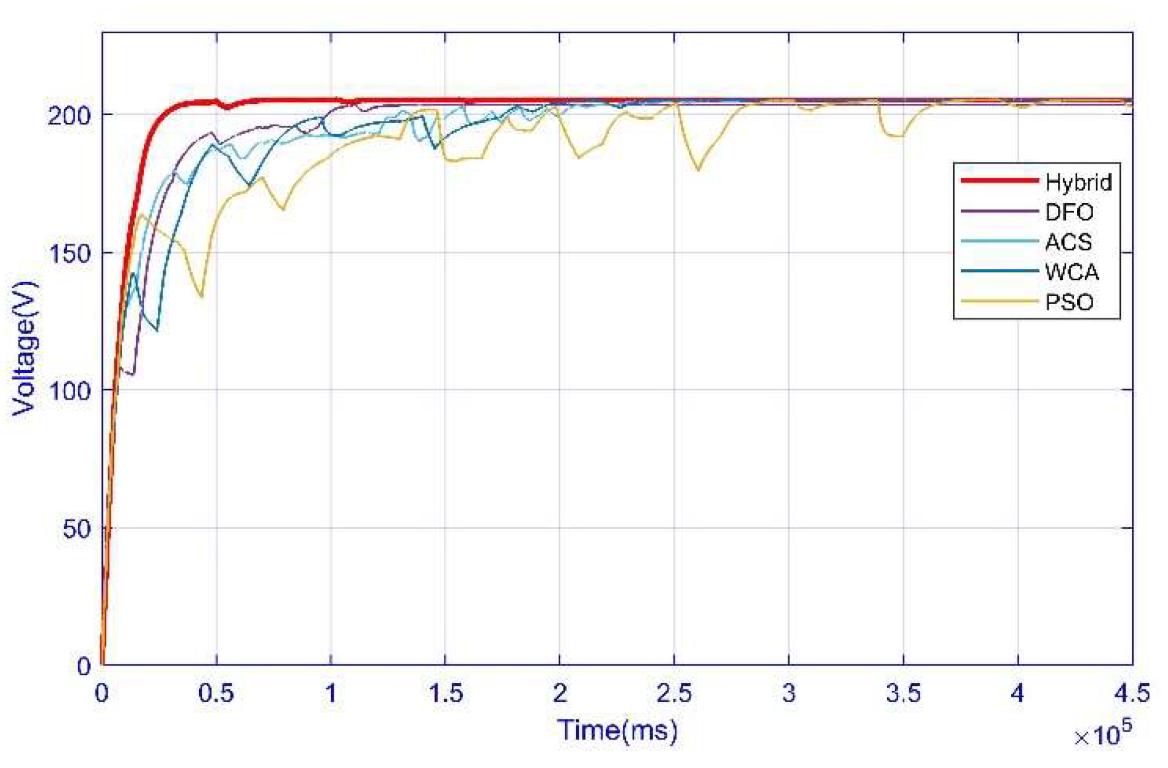
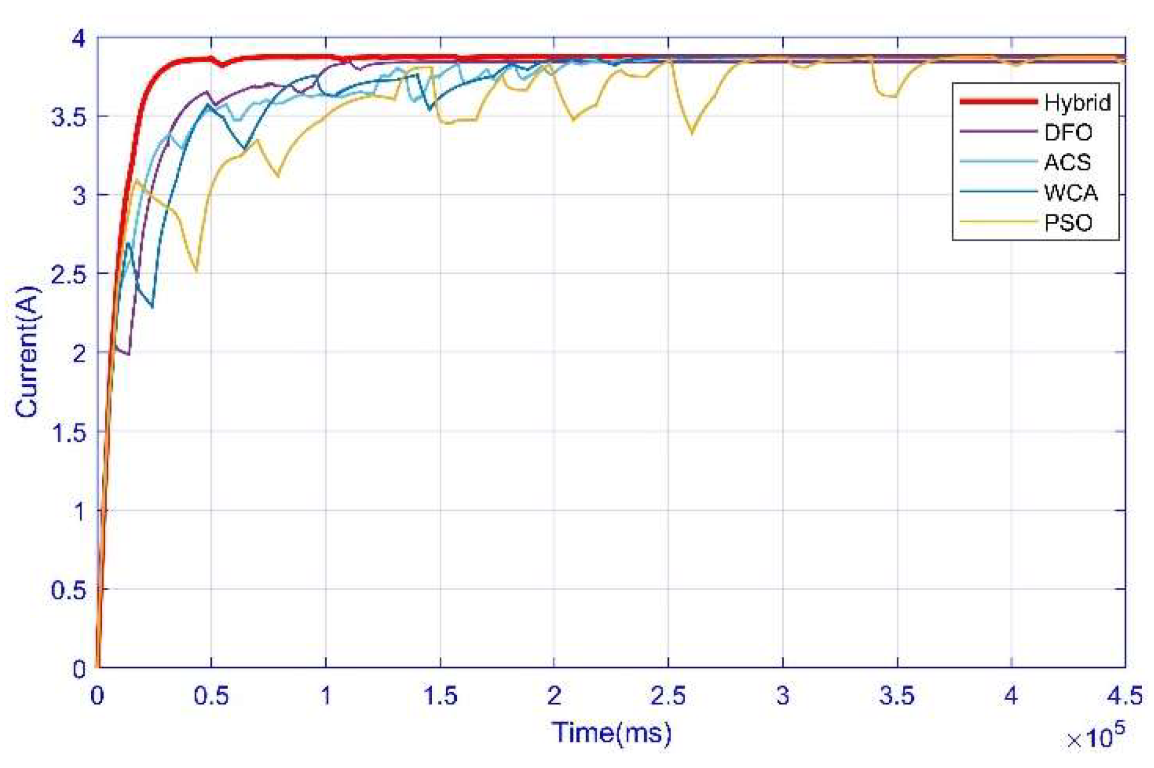
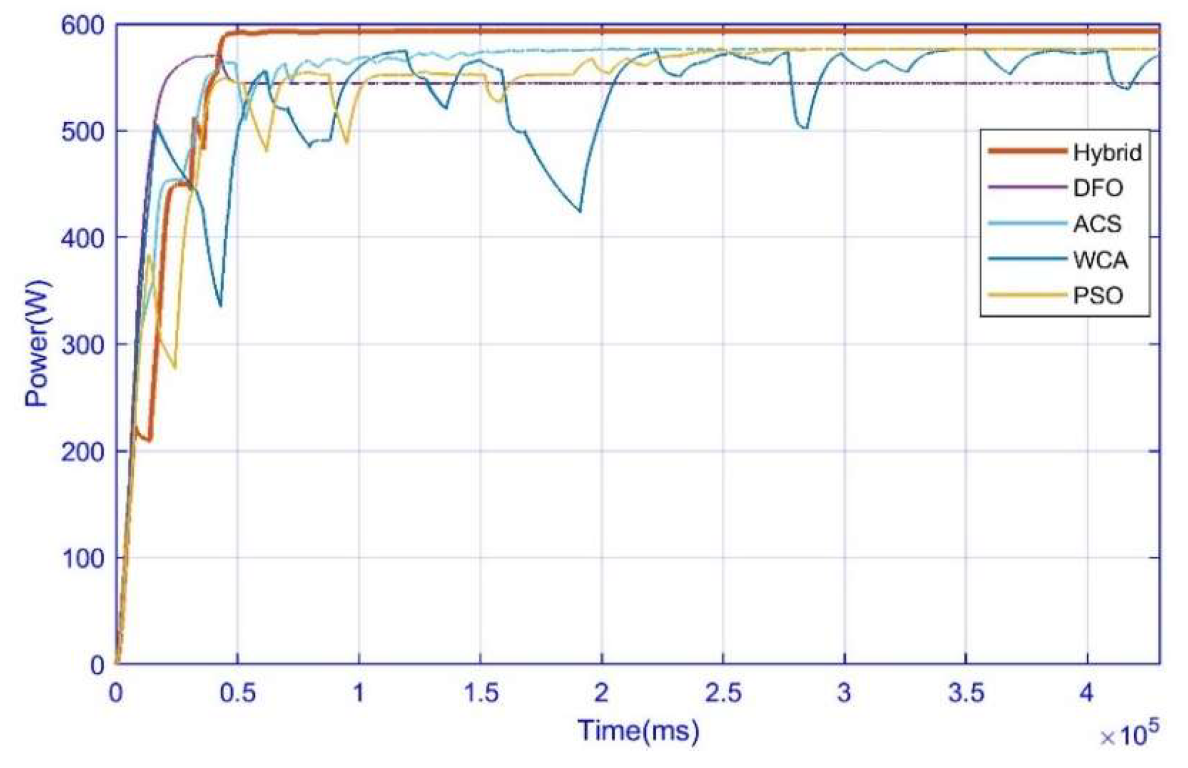
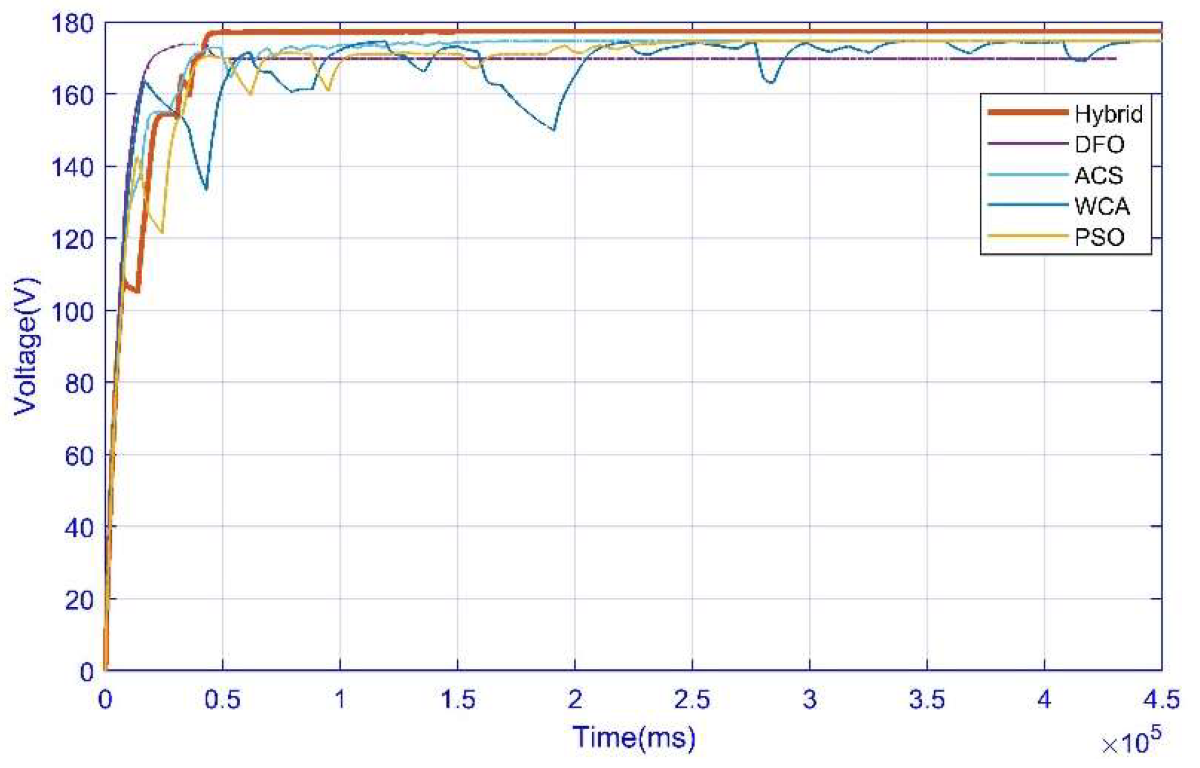
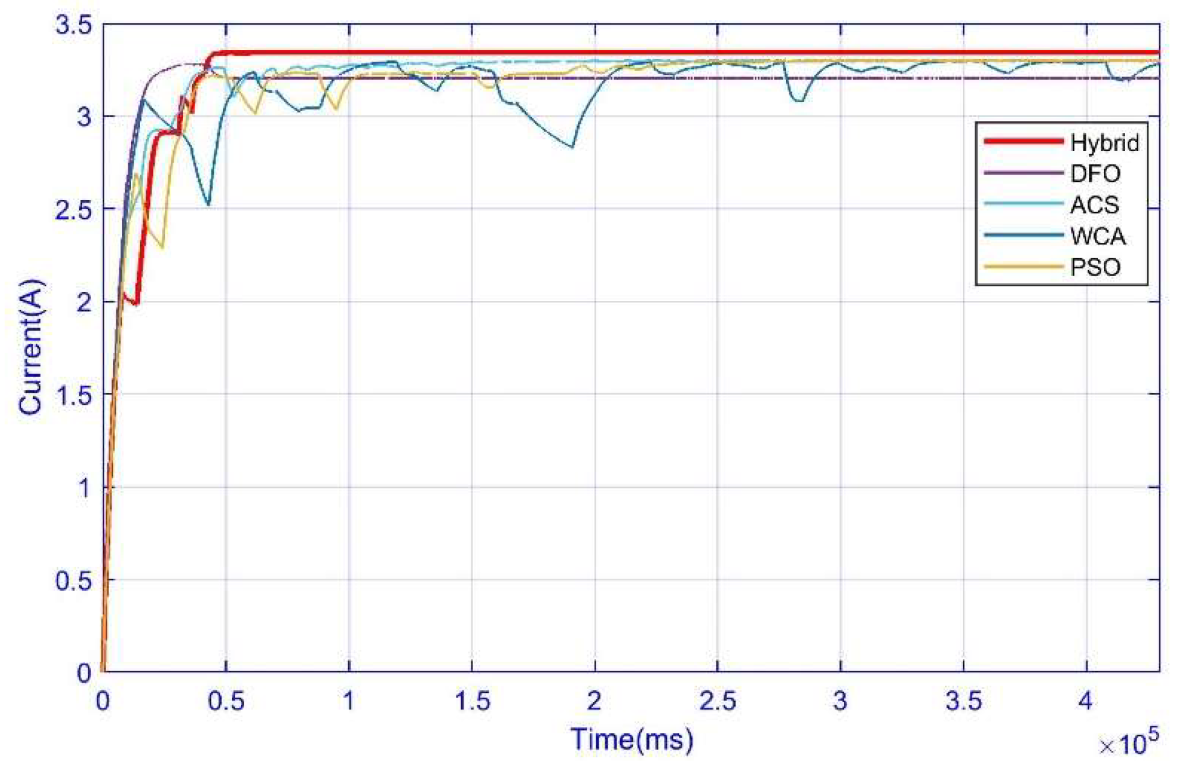
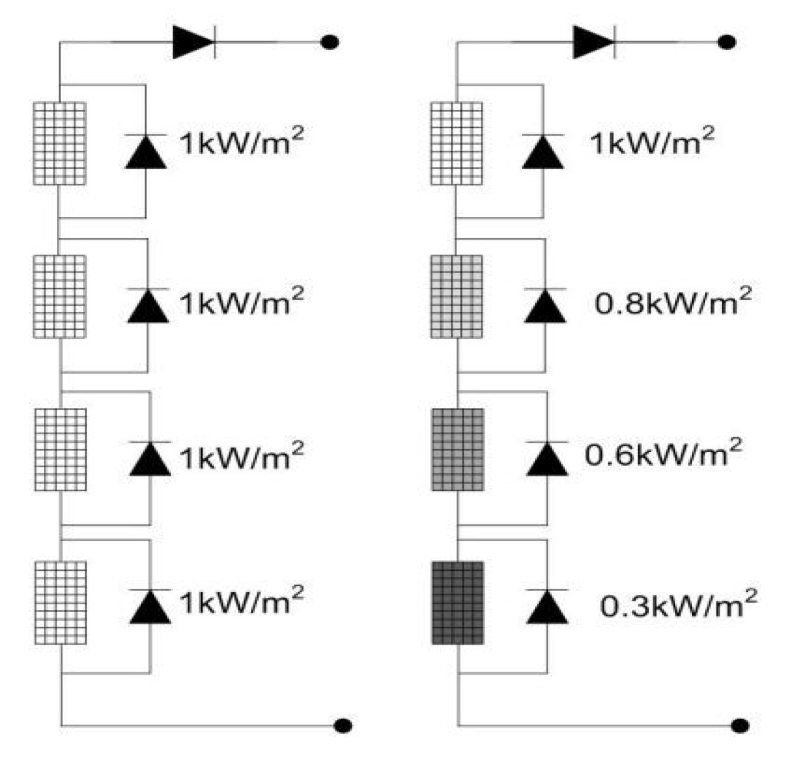
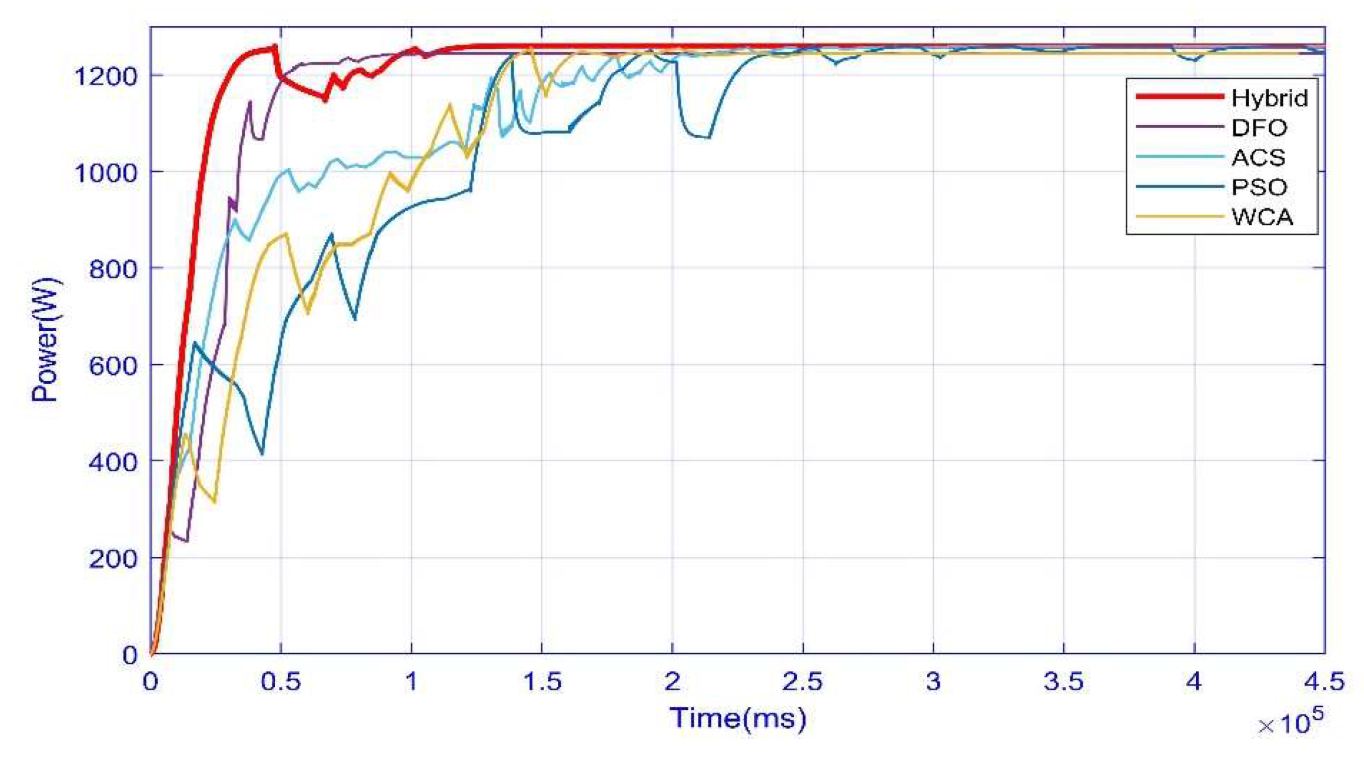
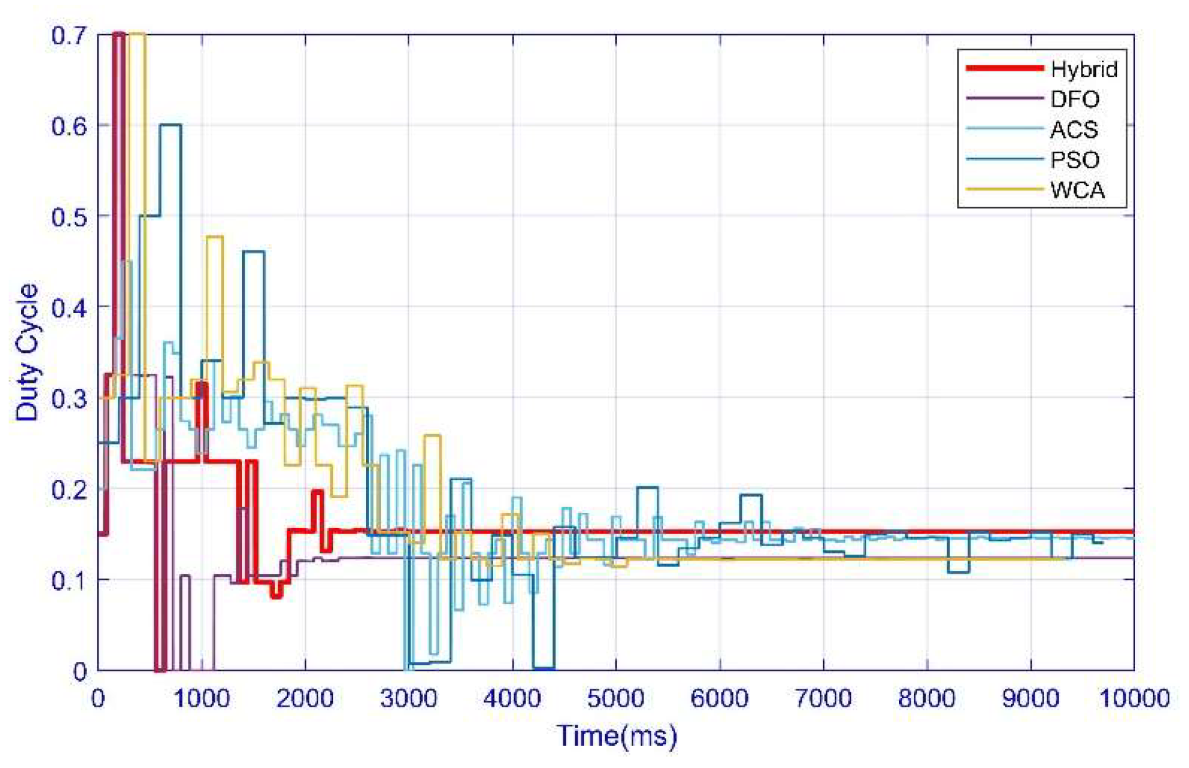
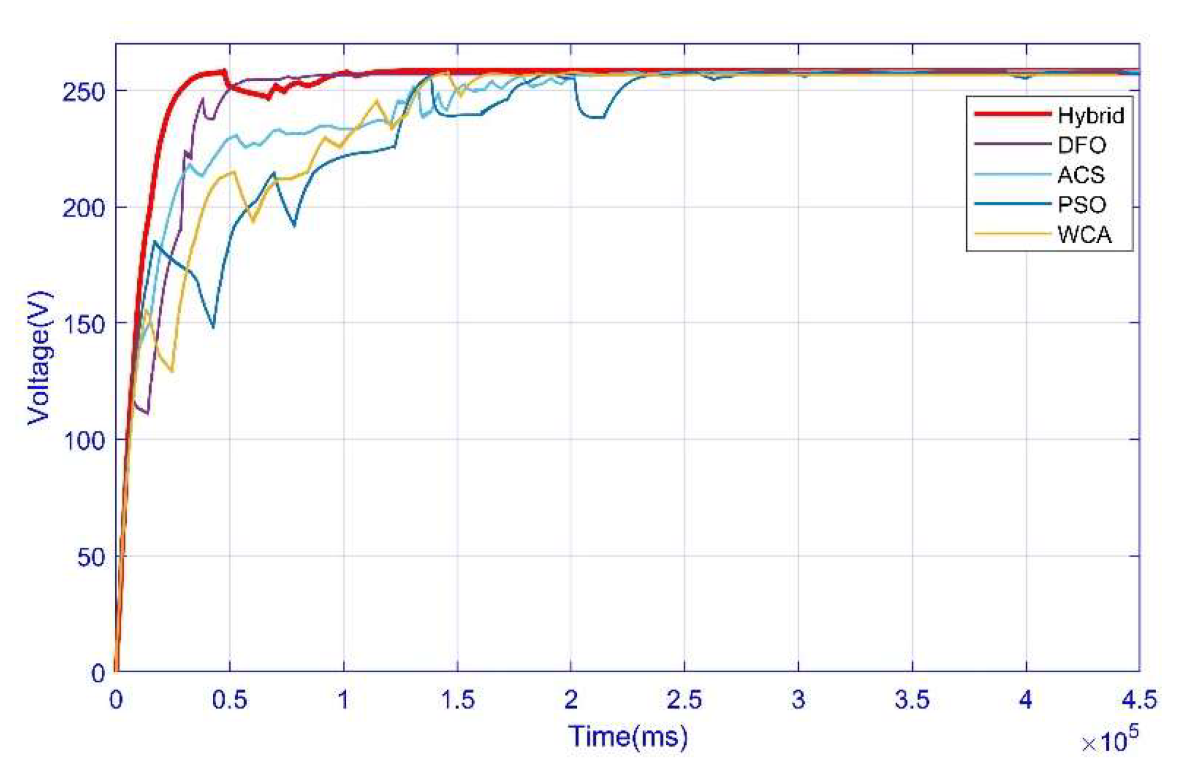
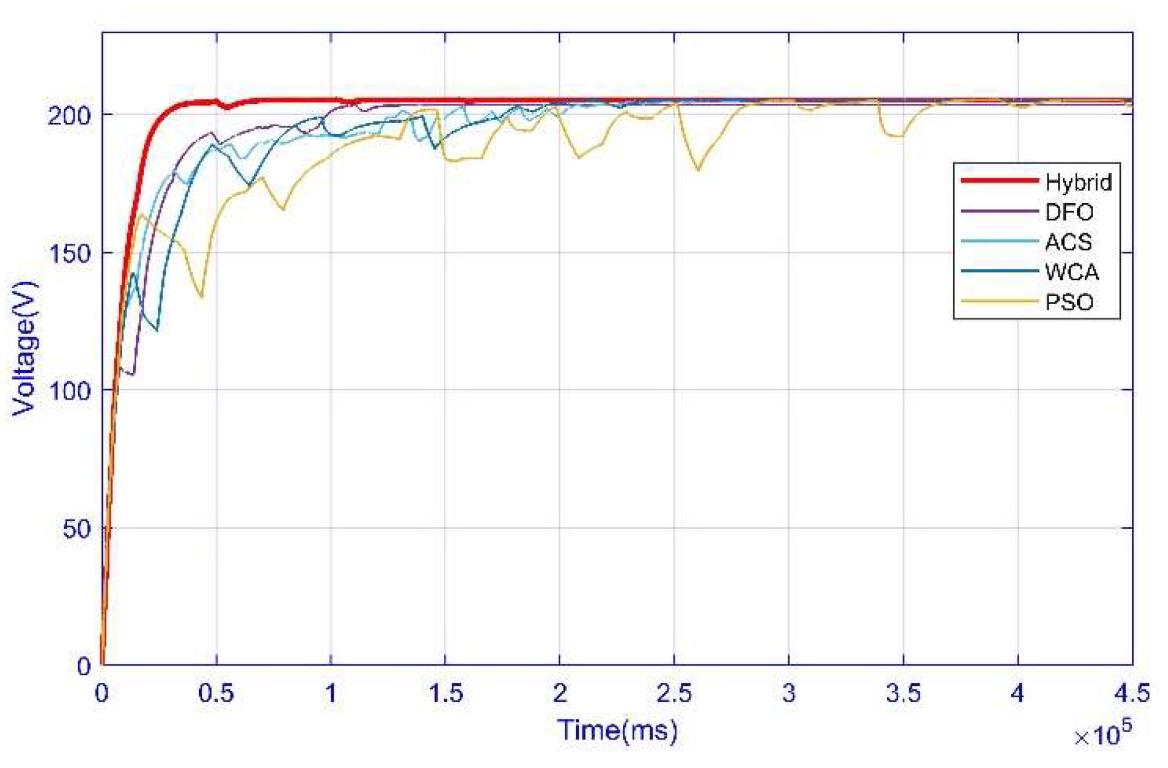
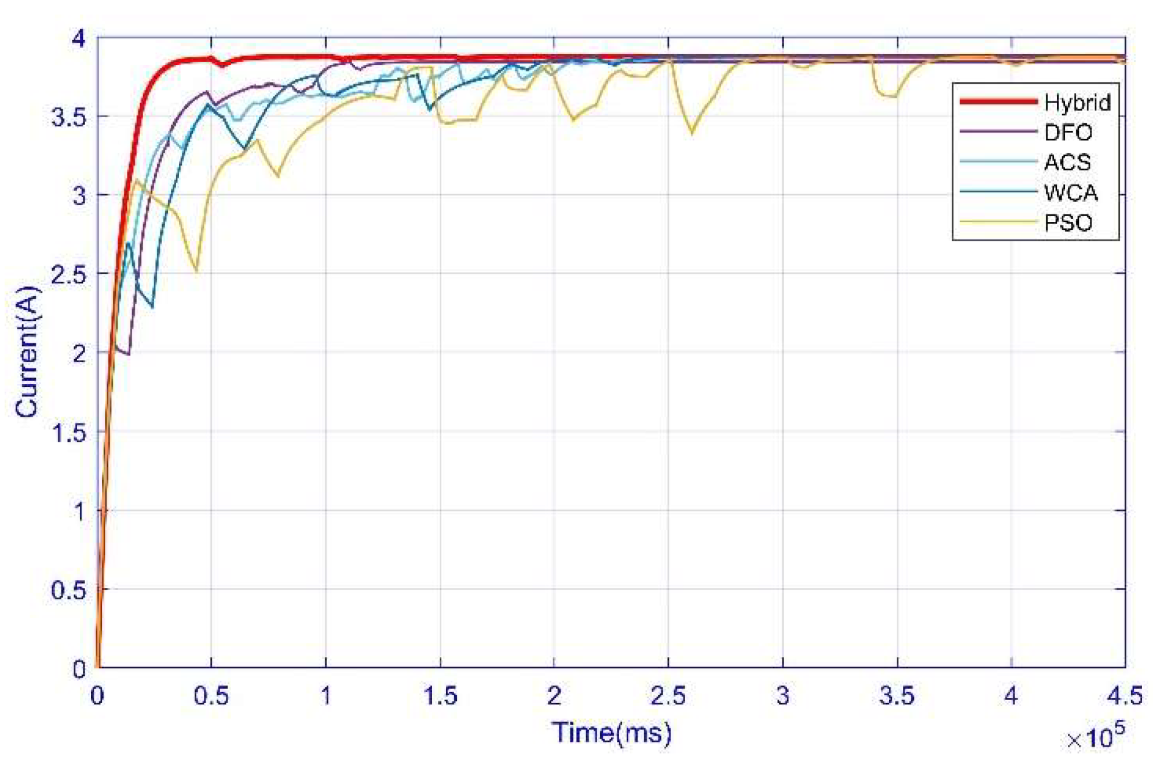
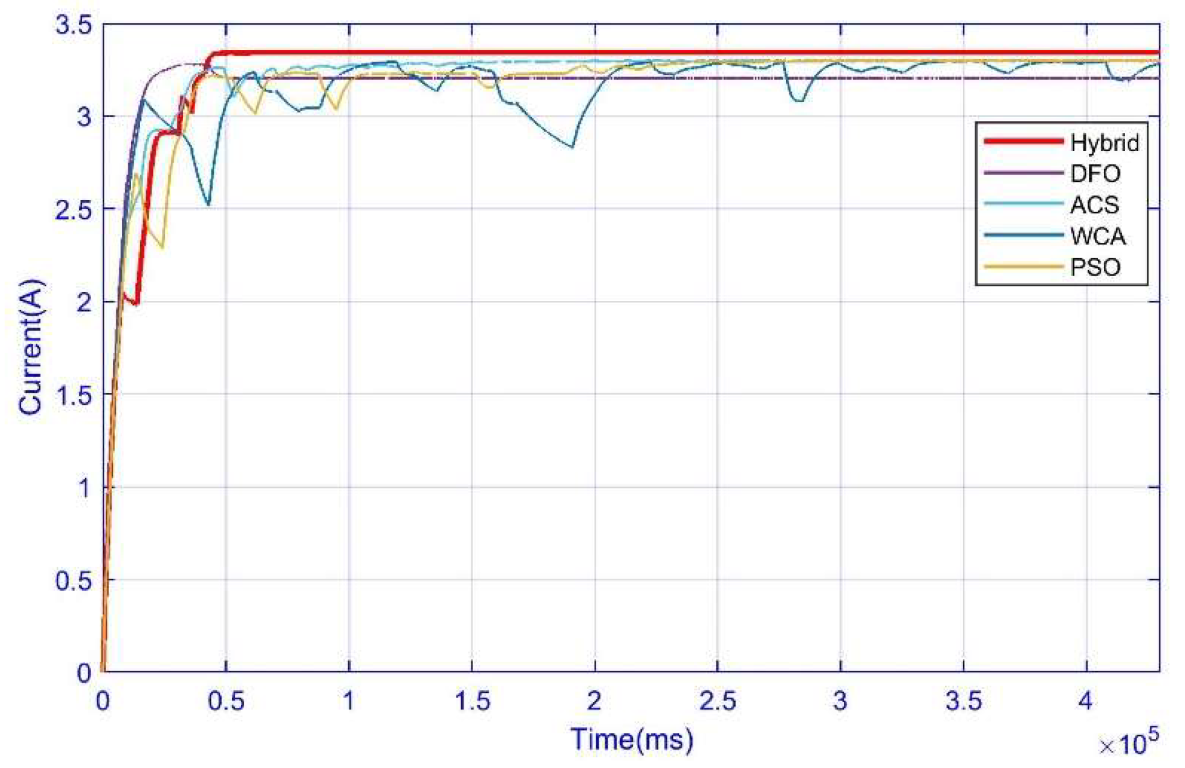
3.1. Case 1: Uniform Irradiance Condition

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Pmax | ||||
|---|---|---|---|---|---|
| Case 1–4 | PV1 | PV2 | PV3 | PV4 | (W) |
| Case 1 | 1000 | 1000 | 1000 | 1000 | 1260 |
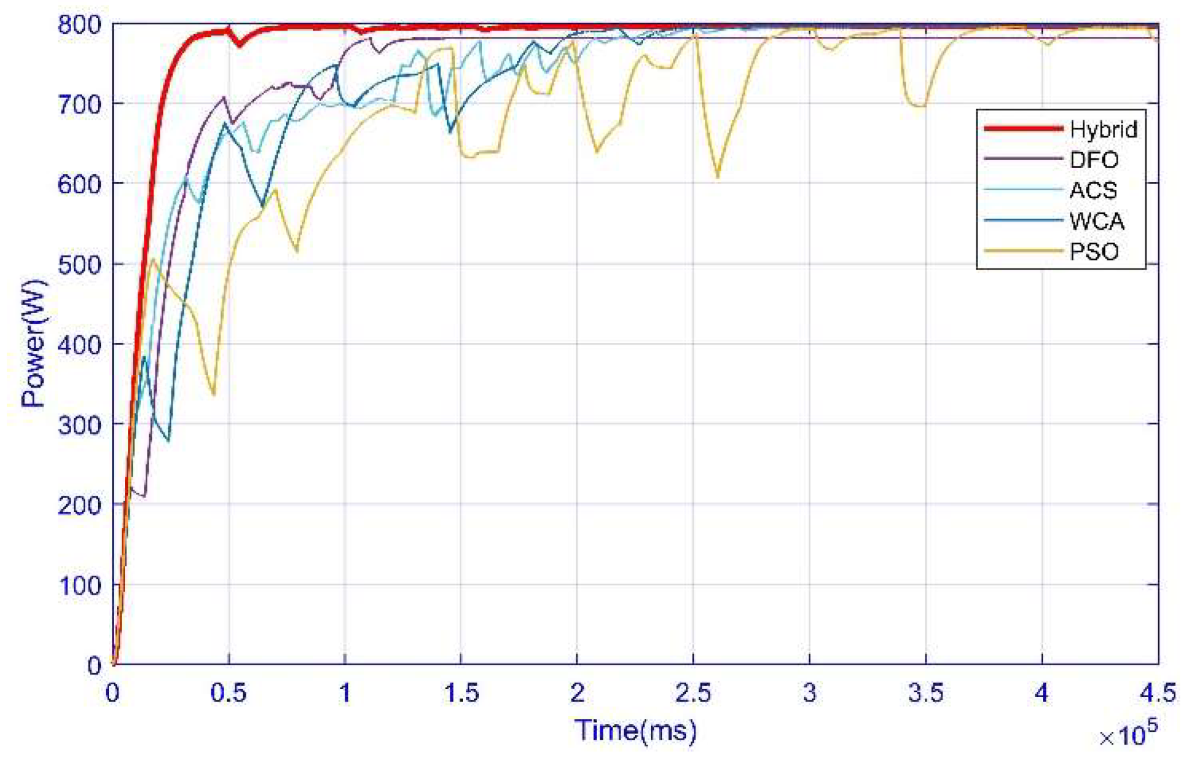
| Case 2 | 900 | 1000 | 800 | 400 | 796 |
| Case 3 | 1000 | 600 | 900 | 300 | 594 |
| Case 4 | 400 | 200 | 600 | 300 | 1078 |
| 500 | 400 | 200 | 300 | ||
| 1000 | 800 | 700 | 1000 | ||
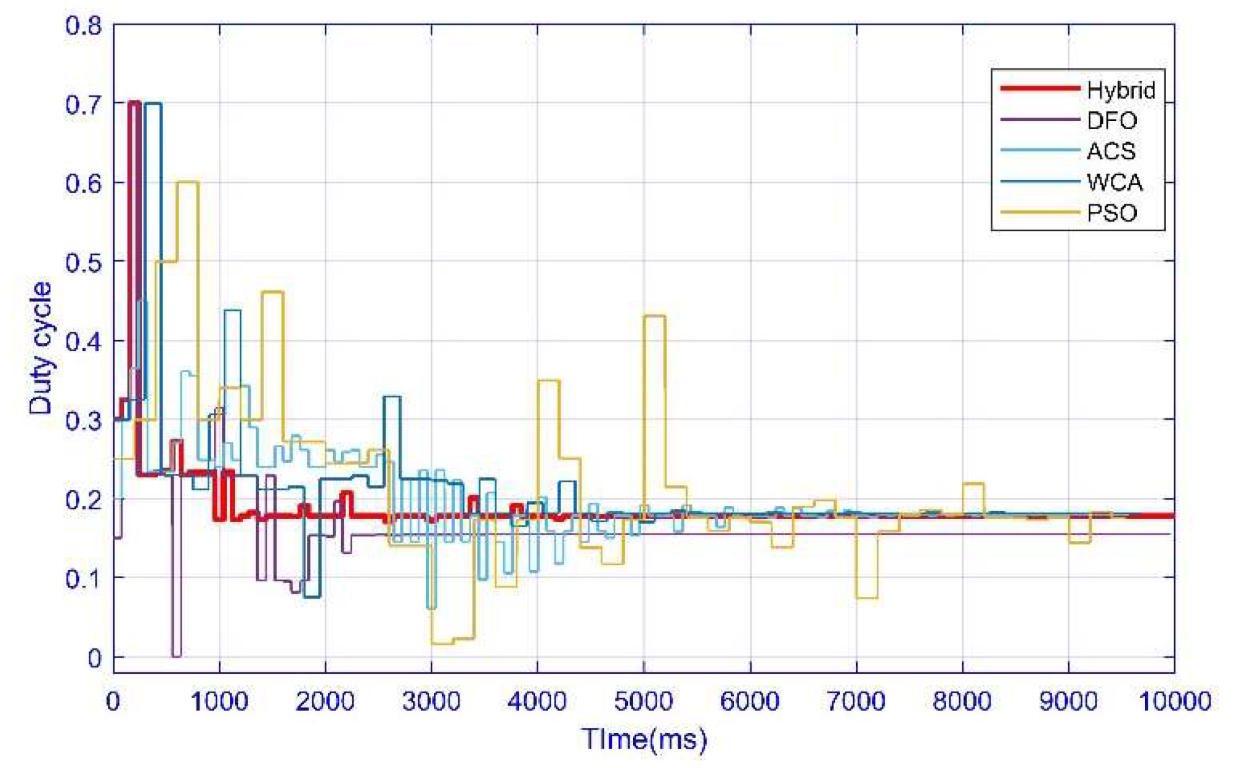
3.2. Case 2: Partial Shading Condition Scenario I
3.3. Case 3: Partial Shading Condition Scenario II
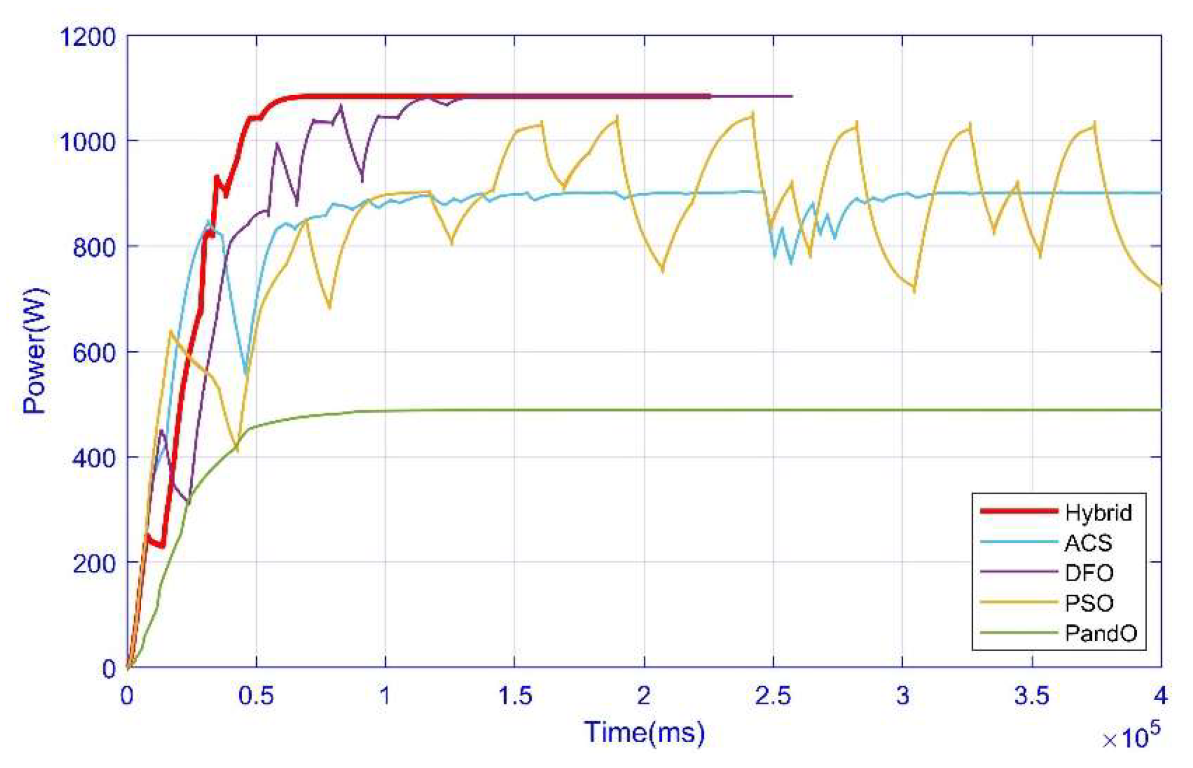
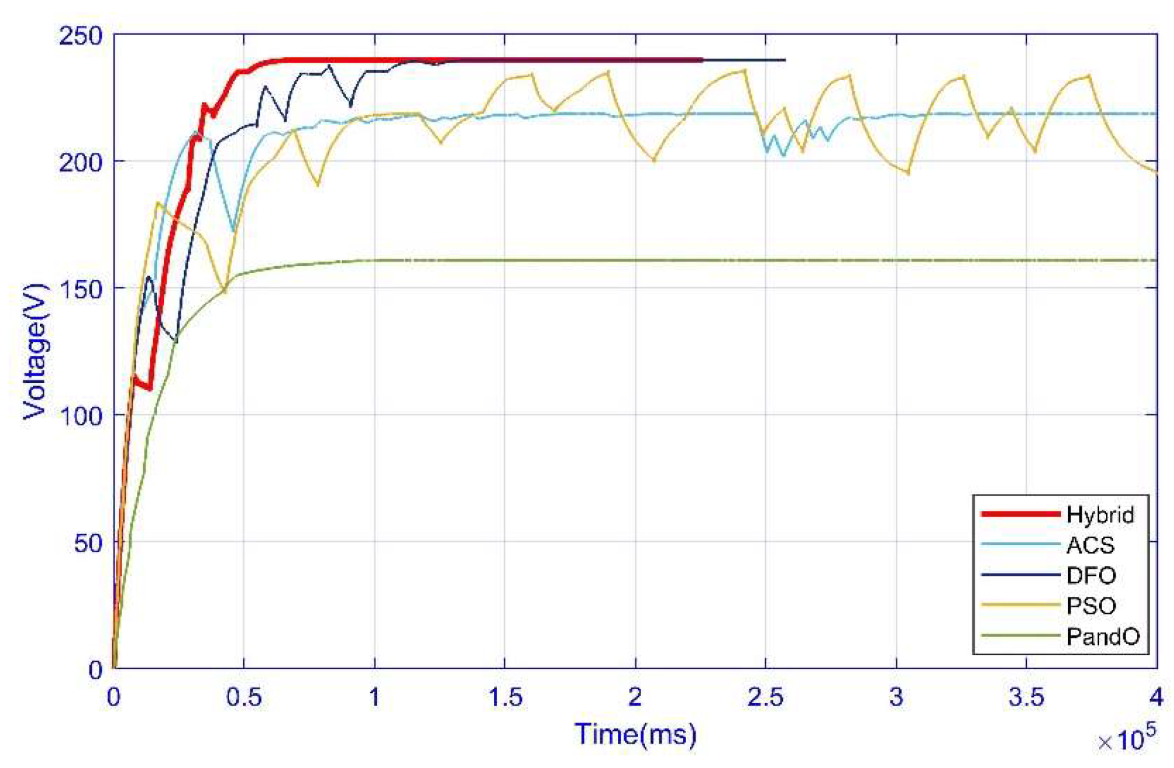
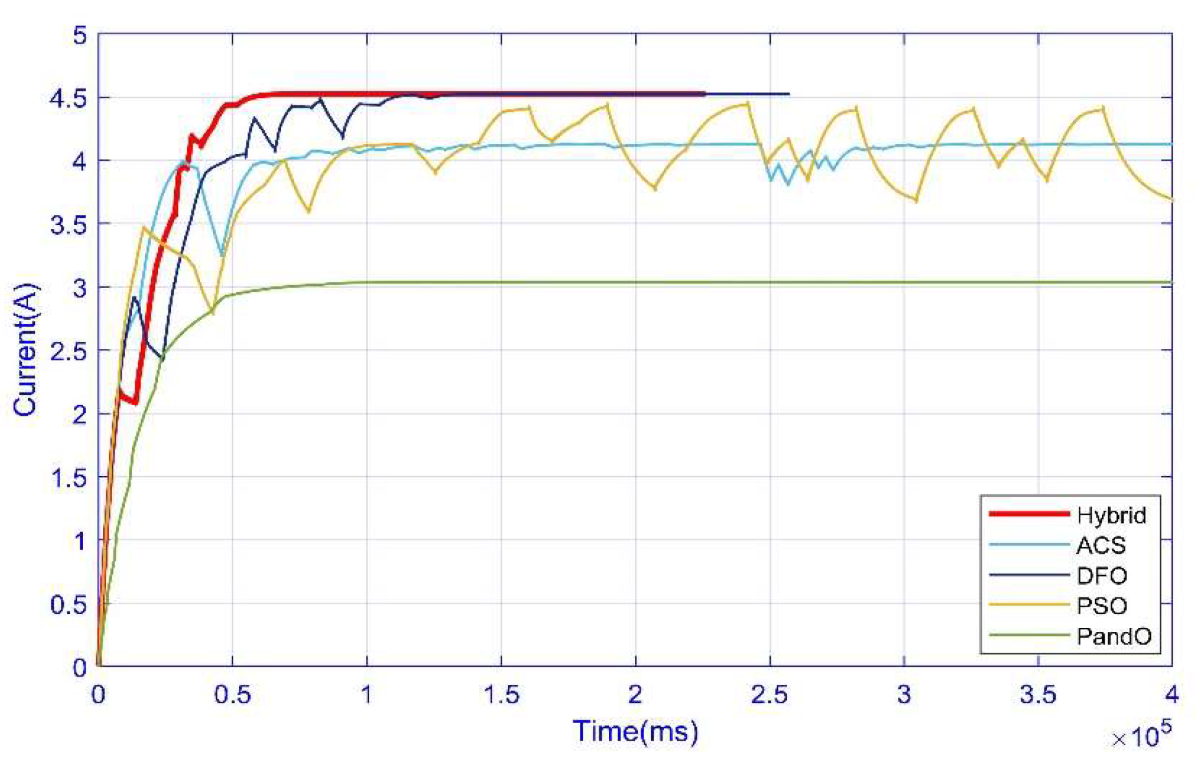
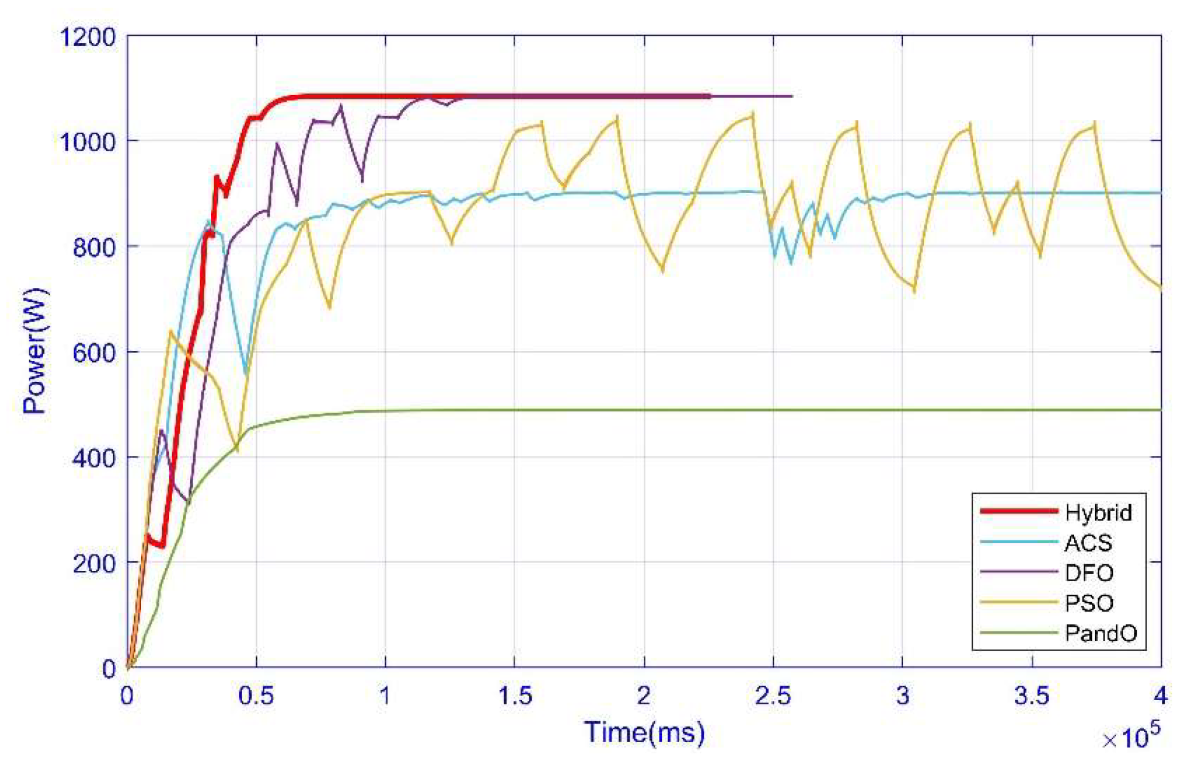
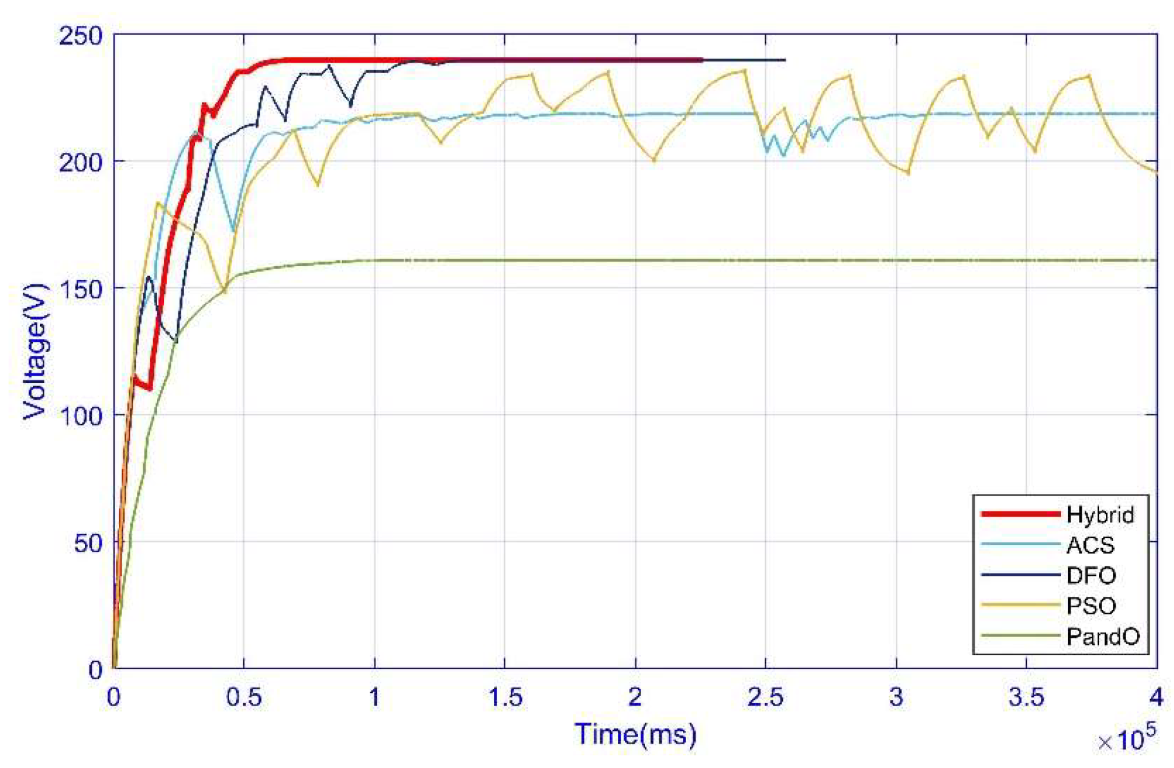
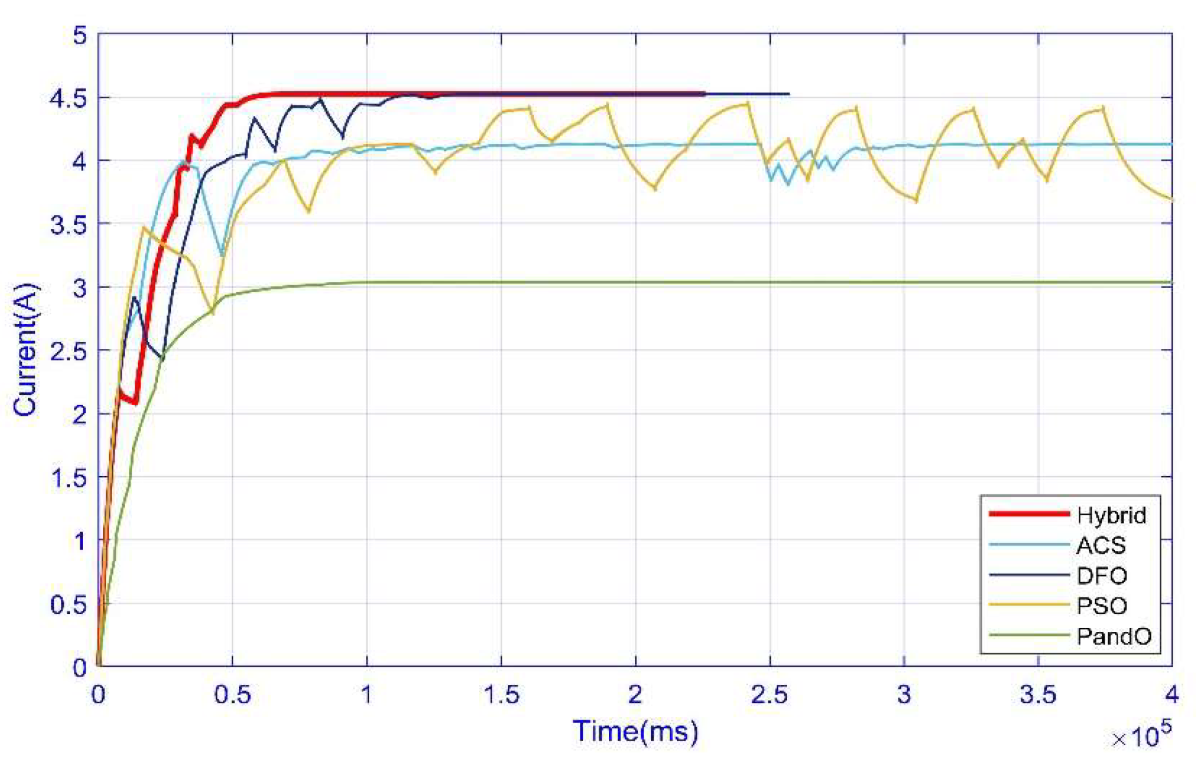
3.4. Case 4: Complex Partial Shading Condition
| Performance Parameters | Hybrid (1–4) | DFO (1–4) | ACS (1–4) | WCA (1–3) | PSO (1–4) | P&O (4) |
|---|---|---|---|---|---|---|
| Convergence Time (s) | 0.16 | 0.23 | 0.46 | 1.4 | 0.47 | - |
| 0.25 | 1.2 | 1.6 | 2.2 | 3.0 | - | |
| 0.4 | 0.4 | 1.4 | 1.3 | 2.4 | - | |
| 0.17 | 0.19 | 0.40 | - | 0.42 | LM | |
| Settling Time GM (s) | 0.20 | 0.27 | 0.69 | 1.7 | 0.70 | - |
| 0.3 | 1.4 | 2.3 | 2.7 | 3.4 | - | |
| 0.6 | 0.6 | 1.6 | 2.4 | 2.5 | - | |
| 0.25 | 0.22 | 0.51 | - | 0.50 | LM | |
| GM Located | YES | YES | YES | YES | YES | - |
| YES | YES | YES | YES | YES | - | |
| YES | NO | NO | NO | NO | - | |
| YES | YES | YES | - | YES | NO | |
| Power at GM | 1260 | 1260 | 1260 | 1260 | 1260 | - |
| 796 | 796 | 796 | 796 | 796 | - | |
| 594 | 594 | 594 | 594 | 594 | - | |
| 1078 | 1078 | 1078 | - | 1078 | 1078 | |
| Power Tracked (W) | 1259.9 | 1245 | 1236 | 1255 | 1244 | - |
| 794.8 | 792.3 | 793 | 793.4 | 792 | - | |
| 593.2 | 552.7 | 570.6 | 568.2 | 570.4 | - | |
| 1077.0 | 1075 | 1067 | - | 1068 | 262 | |
| Energy | 1.66 × 103 | 1.65 × 103 | 1.65 × 103 | 1.4 × 103 | 1.64 × 103 | - |
| 1.273 × 103 | 1.23 × 103 | 1.48 × 103 | 1.128 × 103 | 1.263 × 103 | - | |
| 0.87 × 103 | 0.46 × 103 | 1.49 × 103 | 2.21 × 103 | 2.3 × 103 | - | |
| 2.12 × 103 | 2.12 × 103 | 2.12 × 103 | - | 2.12 × 103 | 0.5 × 103 | |
| Efficiency | 99.9% | 98.41% | 98.1% | 99.6% | 98.7% | - |
| 99.84% | 99.53% | 99.2% | 99.67% | 99.49% | - | |
| 99.86% | 93.04% | 96.06% | 95.65% | 96.04% | - | |
| 99.6% | 99.5% | 99.2% | - | 99.2% | 24.7% |
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Capuano, L.U.S. Energy Information Administration’s International Energy Outlook 2020; US Department of Energy: Washington, DC, USA, 2020; p. 7. Available online: https://www.Eia.Gov/Outlooks/Ieo/ (accessed on 20 September 2021).
- Eldin, A.H.; Refaey, M.; Farghly, A. A Review on Photovoltaic Solar Energy Technology and Its Efficiency. In Proceedings of the 17th International Middle-East Power System Conference (MEPCON’15), Mansoura, Egypt, 15–17 December 2015; pp. 1–9. [Google Scholar]
- Sarwar, S.; Javed, M.Y.; Jaffery, M.H.; Arshad, J.; Rehman, A.U.; Shafiq, M.; Choi, J.-G. A Novel Hybrid MPPT Technique to Maximize Power Harvesting from PV System under Partial and Complex Partial Shading. Appl. Sci. 2022, 12, 587. [Google Scholar] [CrossRef]
- Javed, M.Y.; Mirza, A.F.; Hasan, A.; Rizvi, S.T.H.; Ling, Q.; Gulzar, M.M.; Safder, M.U.; Mansoor, M. A Comprehensive Review on a PV Based System to Harvest Maximum Power. Electronics 2019, 8, 1480. [Google Scholar] [CrossRef] [Green Version]
- Sher, H.A.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Chiaberge, M. An intelligent control strategy of fractional short circuit current maximum power point tracking technique for photovoltaic applications. J. Renew. Sustain. Energy 2015, 7, 013114. [Google Scholar] [CrossRef]
- Baimel, D.; Tapuchi, S.; Levron, Y.; Belikov, J. Improved Fractional Open Circuit Voltage MPPT Methods for PV Systems. Electronics 2019, 8, 321. [Google Scholar] [CrossRef] [Green Version]
- Devi, V.K.; Premkumar, K.; Beevi, A.B.; Ramaiyer, S. A modified Perturb & Observe MPPT technique to tackle steady state and rapidly varying atmospheric conditions. Sol. Energy 2017, 157, 419–426. [Google Scholar]
- Radjai, T.; Rahmani, L.; Mekhilef, S.; Gaubert, J.P. Implementation of a modified incremental conductance MPPT algorithm with direct control based on a fuzzy duty cycle change estimator using dSPACE. Sol. Energy 2014, 110, 325–337. [Google Scholar] [CrossRef]
- Almonacid, F.; Rus, C.; Hontoria, L.; Fuentes, M.; Nofuentes, G. Characterisation of Si-Crystalline PV Modules by Artificial Neural Networks; Elsevier: Amsterdam, The Netherlands, 2009; Volume 34, pp. 941–949. [Google Scholar] [CrossRef]
- Titri, S.; Larbes, C.; Toumi, K.Y.; Benatchba, K. A New MPPT Controller Based on the Ant Colony Optimization Algorithm for Photovoltaic Systems under Partial Shading Conditions; Elsevier: Amsterdam, The Netherlands, 2017; Volume 58, pp. 465–479. [Google Scholar] [CrossRef]
- Mohamed, A.; Berzoy, A.; Mohammed, O.A. Design and Hardware Implementation of FL-MPPT Control of PV Systems Based on GA and Small-Signal Analysis. IEEE Trans. Sustain. Energy 2017, 8, 279–290. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An improved particle swarm optimization (PSO)–based MPPT for PV with reduced steady-state oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]
- Mansoor, M.; Mirza, A.F.; Ling, Q. Harris Howk optomization-Based MPPT Control for PV Systems under Partial Shading Conditions. J. Clean. Prod. 2020, 274, 122857. [Google Scholar] [CrossRef]
- Pei, T.; Hao, X.; Gu, Q. A novel global maximum power point tracking strategy based on modified flower pollination algorithm for photovoltaic systems under non-uniform irradiation and temperature conditions. Energies 2018, 11, 2708. [Google Scholar] [CrossRef] [Green Version]
- Hussaian Basha, C.; Bansal, V.; Rani, C.; Brisilla, R.; Odofin, S. Development of cuckoo search MPPT algorithm for partially shaded solar PV SEPIC converter. In Soft Computing for Problem Solving; Springer: Berlin/Heidelberg, Germany, 2020; pp. 727–736. [Google Scholar]
- Suhardi, D.; Syafaah, L.; Irfan, M.; Yusuf, M.; Effendy, M.; Pakaya, I. Improvement of Maximum Power Point Tracking (MPPT) Efficiency Using Grey Wolf Optimization (GWO) Algorithm in Photovoltaic (PV) System. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Kazimierz Dolny, Poland, 23–25 July 2019; IOP Publishing: Bristol, UK, 2019; Volume 674, p. 012038. [Google Scholar]
- Fan, L.; Ma, X. Maximum power point tracking of PEMFC based on hybrid artificial bee colony algorithm with fuzzy control. Sci. Rep. 2022, 12, 4316. [Google Scholar] [CrossRef] [PubMed]
- Tajuddin, M.; Azmi, A.; Ayob, S.; Sutikno, T. Differential evolution based solar photovoltaic array reconfiguration algorithm for optimal energy extraction during partial shading condition. Int. J. Power Electron. Drive Syst. 2018, 9, 1397. [Google Scholar]
- Lin, Z.; Wang, J.; Fang, Z.; Hu, M.; Cai, C.; Zhang, J. Accurate maximum power tracking of wireless power transfer system based on simulated annealing algorithm. IEEE Access 2018, 6, 60881–60890. [Google Scholar] [CrossRef]
- Hosseinpour, M.; Mansoori, S.; Shayeghi, H. Selective Harmonics Elimination Technique in Cascaded H-Bridge Multi-Level Inverters Using the Salp Swarm Optimization Algorithm. J. Oper. Autom. Power Eng. 2020, 8, 32–42. [Google Scholar]
- Shahdadi, A.; Khajeh, A.; Barakati, S.M. A New Slip Surface Sliding Mode Controller to Implement MPPT Method in Photovoltaic System. In Proceedings of the 2018 9th Annual Power Electronics, Drives Systems and Technologies Conference (PEDSTC), Tehran, Iran, 13–15 February 2018; pp. 212–217. [Google Scholar]
- Yang, X.; Li, W.; Su, L.; Wang, Y.; Yang, A. An improved evolution fruit fly optimization algorithm and its application. Neural Comput. Appl. 2020, 32, 9897–9914. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization (HHO): Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Gali, V.; Babu, B.C.; Mutluri, R.B.; Gupta, M.; Gupta, S.K. Experimental investigation of Harris Hawk optimization-based maximum power point tracking algorithm for photovoltaic systems under partial shading conditions. Optim. Control Appl. Methods 2021. [Google Scholar] [CrossRef]
- Arnold, F.; Komla, S.; Folly, A. A comparative study between deterministic and two meta-heuristic algorithms for solar PV MPPT control under partial shading conditions. Syst. Soft Comput. 2022, 4, 200040. [Google Scholar] [CrossRef]
- Zafar, M.H.; Khan, N.M.; Mirza, A.F.; Mansoor, M.; Akhtar, N.; Qadir, M.U.; Khan, N.A.; Moosavi, S.K.R. A novel me- ta-heuristic optimization algorithm based MPPT control technique for PV systems under complex partial shading condition. Sustain. Energy Technol. Assess. 2021, 47, 101367. [Google Scholar] [CrossRef]







| Sr. No. | Ref No. | Year | MPPT Method | Tracking Accuracy | Efficient for Partial Shading | Converter Type | Variable Sensed | Type of PV Sys. Used | Can Be in Low Cost Controller | Tracking Speed | Level of Complexity | Total Score = 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 01 | [5] | 2015 | FSSC | Med./2 | No/1 | Boost | V/3 | SAPVS | Yes | Med./2 | Low/3 | 11 |
| 02 | [6] | 2019 | FOCV | Med./2 | No/1 | Boost | I/3 | SAPVS | Yes | Med./2 | Low/3 | 11 |
| 03 | [7] | 2017 | P&O | Med./2 | No/1 | Boost | I,V/1 | GCPVS | Yes | Fast/3 | Low/3 | 10 |
| 04 | [8] | 2014 | InC | High/3 | Yes/3 | Boost | I,V/1 | SAPVS | Yes | Fast/3 | Med./2 | 12 |
| 05 | [9] | 2009 | ANN | High/3 | Yes/3 | Buck | I,V/1 | SAPVS | Yes | Med./2 | Low/3 | 12 |
| 06 | [10] | 2017 | ACO | High/3 | Yes/3 | Boost | I,V/1 | SAPVS | No | Fast/3 | Low/3 | 13 |
| 07 | [11] | 2017 | GA | Med./2 | Yes/3 | Buck-Boost | I,V/1 | GCPVS | Yes | Med./2 | Low/3 | 11 |
| 08 | [12] | 2012 | PSO | Med./2 | Yes/3 | Buck-Boost | I,V/1 | GCPVS | No | Med./2 | Low/3 | 11 |
| 09 | [13] | 2020 | HHO | High/3 | Yes/3 | Boost | I,V/1 | SAPVS | No | Fast/3 | Low/3 | 13 |
| 10 | [14] | 2018 | FP | High/3 | Yes/3 | Buck | I,V/1 | SAPVS | No | Fast/3 | Low/3 | 13 |
| 11 | [15] | 2020 | CS | High/3 | Yes/3 | SEPIC | I,V/1 | SAPVS | No | Fast/3 | High/1 | 11 |
| 12 | [16] | 2019 | GWO | High/3 | Yes/3 | Buck | I,V/1 | SAPVS | No | Fast/3 | Med./2 | 12 |
| 13 | [17] | 2022 | ABC | High/3 | Yes/3 | Boost | I,V/1 | GCPVS | No | Med./2 | Low/3 | 12 |
| 14 | [18] | 2018 | DE | High/3 | Yes/3 | Boost | I,V/1 | GCPVS | Yes | Med./2 | Low/3 | 12 |
| 15 | [19] | 2018 | SA | High/3 | Yes/3 | Boost | I,V/1 | GCPVS | No | Low/1 | Med./2 | 10 |
| 16 | [20] | 2020 | SSO | High/3 | Yes/3 | Boost | I,V/1 | SAPVS | No | Fast/3 | Low/3 | 13 |
| 17 | [21] | 2022 | SMC | High/3 | Yes/3 | Boost | I,V/1 | SAPVS | No | Fast/3 | Med./2 | 12 |
| 18 | [22] | 2020 | FFO | High/3 | Yes/3 | Boost | I,V/1 | GCPVS | No | Med./2 | Low/3 | 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hafeez, M.A.; Naeem, A.; Akram, M.; Javed, M.Y.; Asghar, A.B.; Wang, Y. A Novel Hybrid MPPT Technique Based on Harris Hawk Optimization (HHO) and Perturb and Observer (P&O) under Partial and Complex Partial Shading Conditions. Energies 2022, 15, 5550. https://doi.org/10.3390/en15155550
Hafeez MA, Naeem A, Akram M, Javed MY, Asghar AB, Wang Y. A Novel Hybrid MPPT Technique Based on Harris Hawk Optimization (HHO) and Perturb and Observer (P&O) under Partial and Complex Partial Shading Conditions. Energies. 2022; 15(15):5550. https://doi.org/10.3390/en15155550
Chicago/Turabian StyleHafeez, Muhammad Annas, Ahmer Naeem, Muhammad Akram, Muhammad Yaqoob Javed, Aamer Bilal Asghar, and Yong Wang. 2022. "A Novel Hybrid MPPT Technique Based on Harris Hawk Optimization (HHO) and Perturb and Observer (P&O) under Partial and Complex Partial Shading Conditions" Energies 15, no. 15: 5550. https://doi.org/10.3390/en15155550
APA StyleHafeez, M. A., Naeem, A., Akram, M., Javed, M. Y., Asghar, A. B., & Wang, Y. (2022). A Novel Hybrid MPPT Technique Based on Harris Hawk Optimization (HHO) and Perturb and Observer (P&O) under Partial and Complex Partial Shading Conditions. Energies, 15(15), 5550. https://doi.org/10.3390/en15155550