
A Rapid Solver for the Prediction of Flow-Field of High-Speed Vehicle Moving in a Tube


Abstract
:
1. Introduction
2. Theoretical Approach
2.1. Steady State near Flow-Field Scheme
2.2. The Formulation for Reimann Problem for the Far-Field Flow Solution
2.3. MOC Initial Conditions
| Algorithm 1 Method of Characteristics Solution Algorithm |
| Step 1: Input: define the area distribution for the vehicle, tube dimensions, and flow properties. |
| Step 2: Initialize: the solution |
| step-3: Apply the near-field/ far-field boundary conditions. |
| step-4: Compute near-field flow properties using Equation (6). |
| step-5: Solve the 1-D Reimann problem utilizing the wave equation of Equations (7)–(10). |
| step-6: Apply movement of the vehicle in new time step. |
| step-7: Transfer the solution to the new mesh solution |
| end loop |
| step-9: return Final report of flow-field properties |
3. Numerical Simulations Using the 2-D URANS Model
4. Results
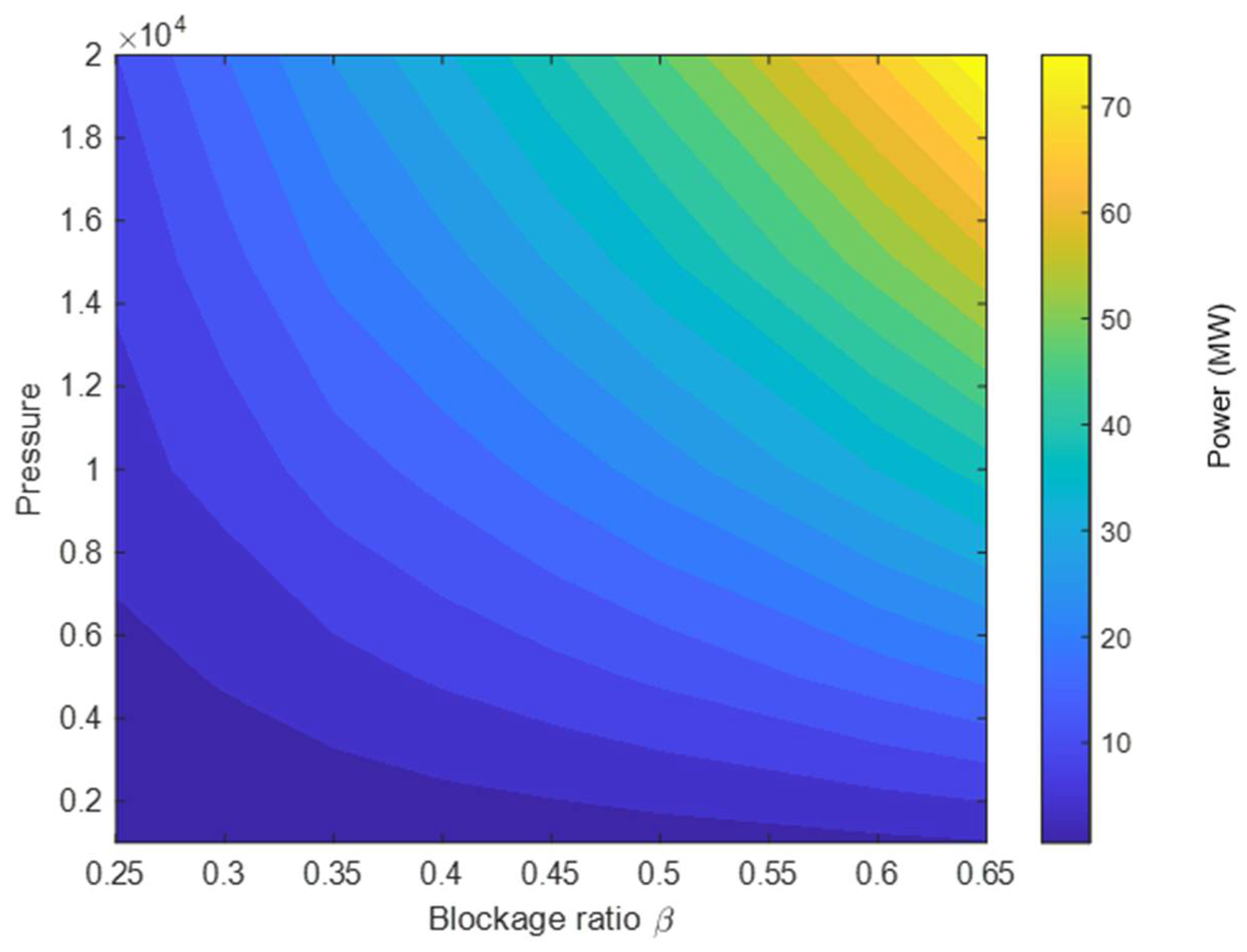
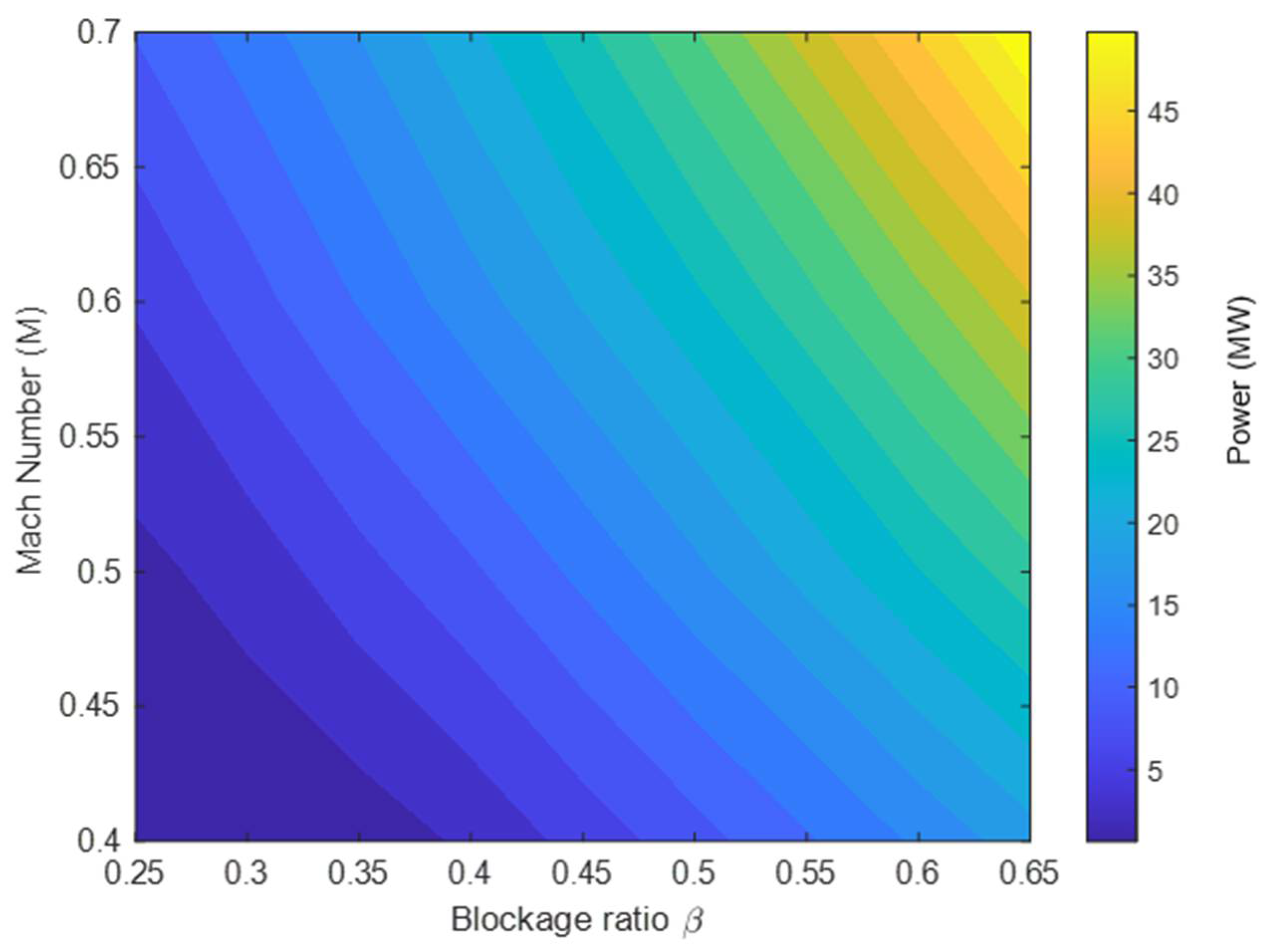
4.1. Power Estimations
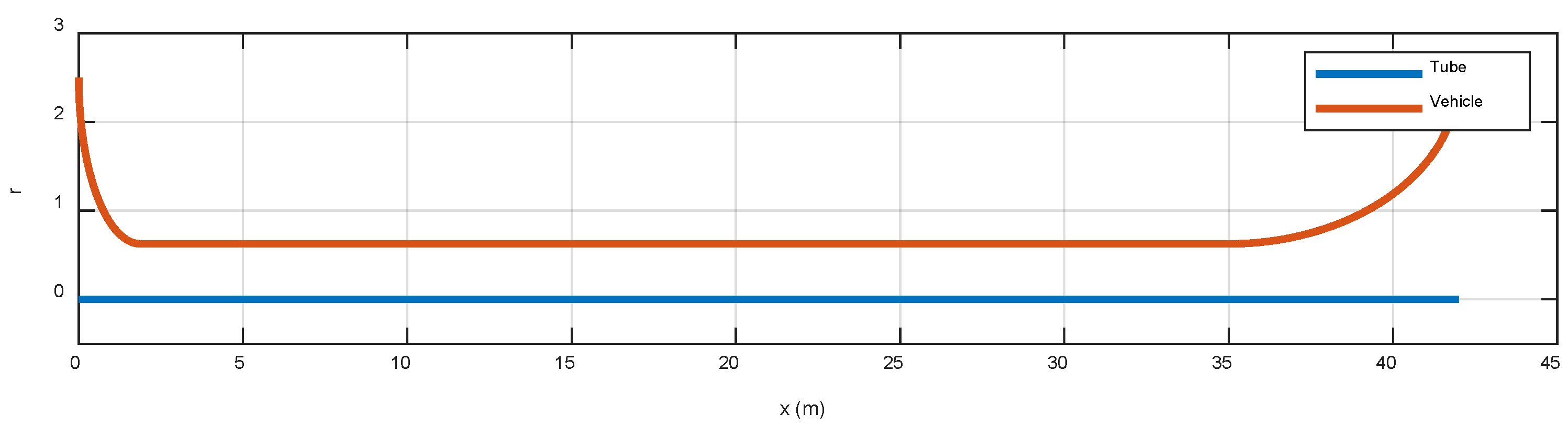
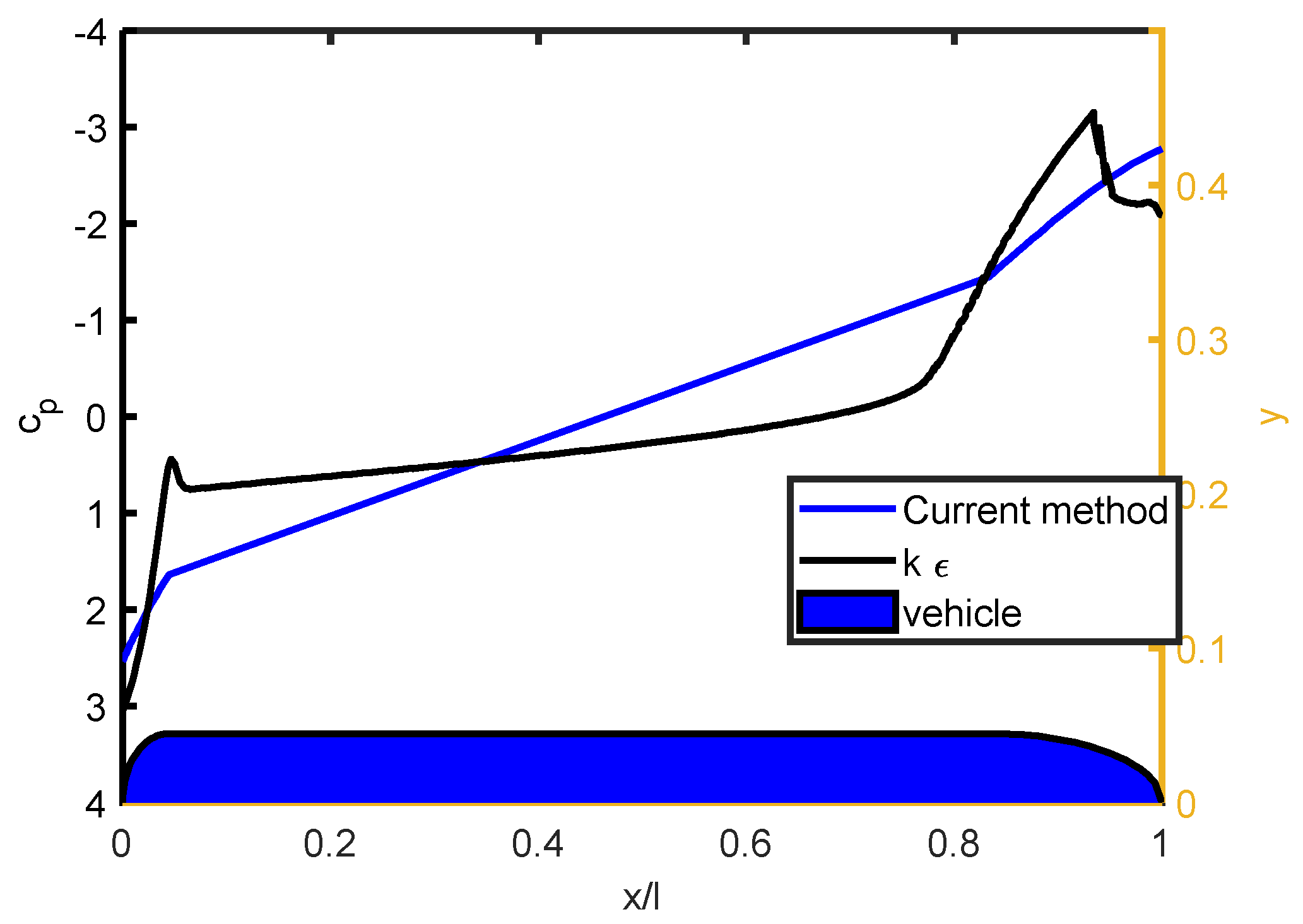
4.2. Near-Field Flow Results
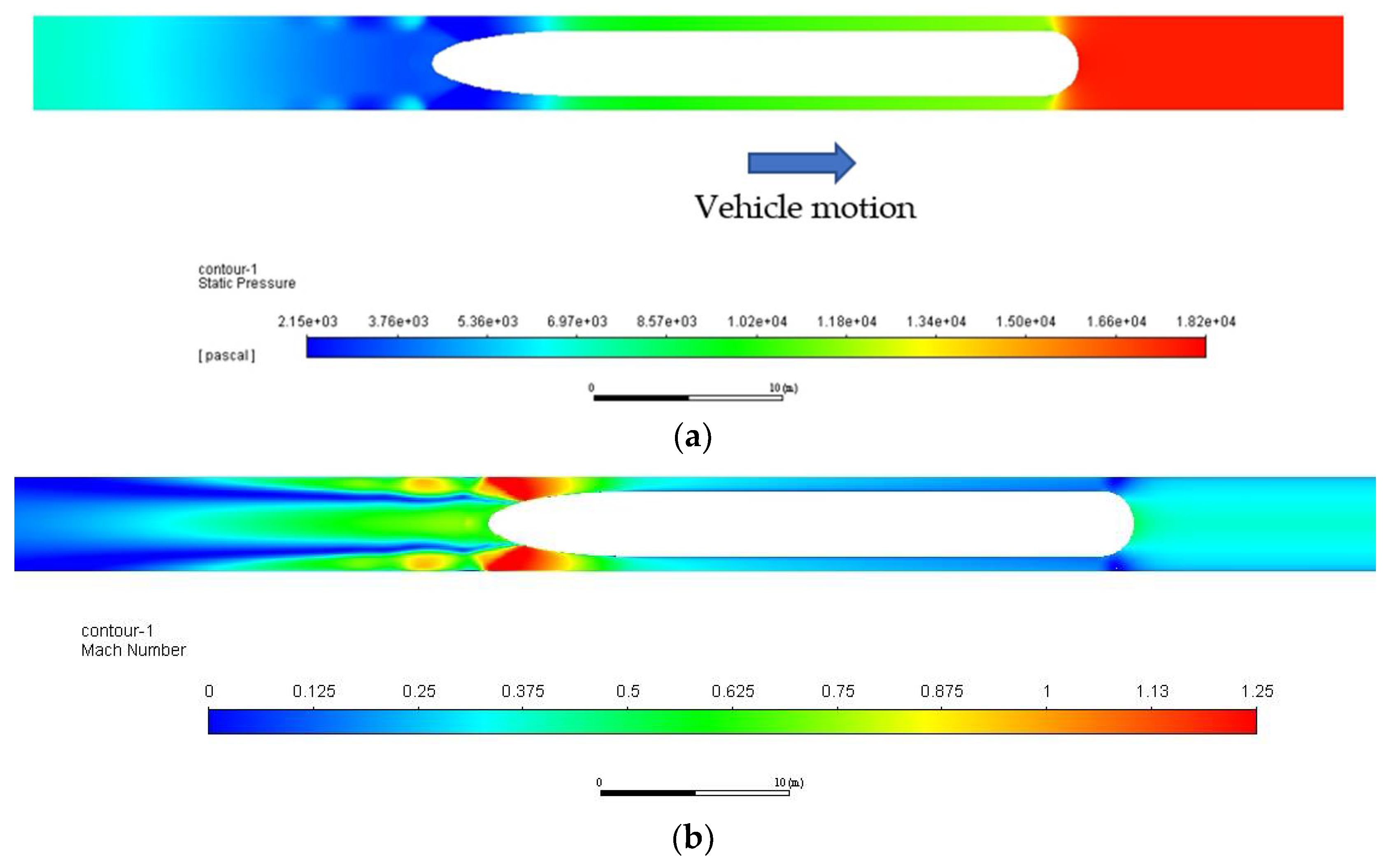
4.3. 2-D URANS Model Results
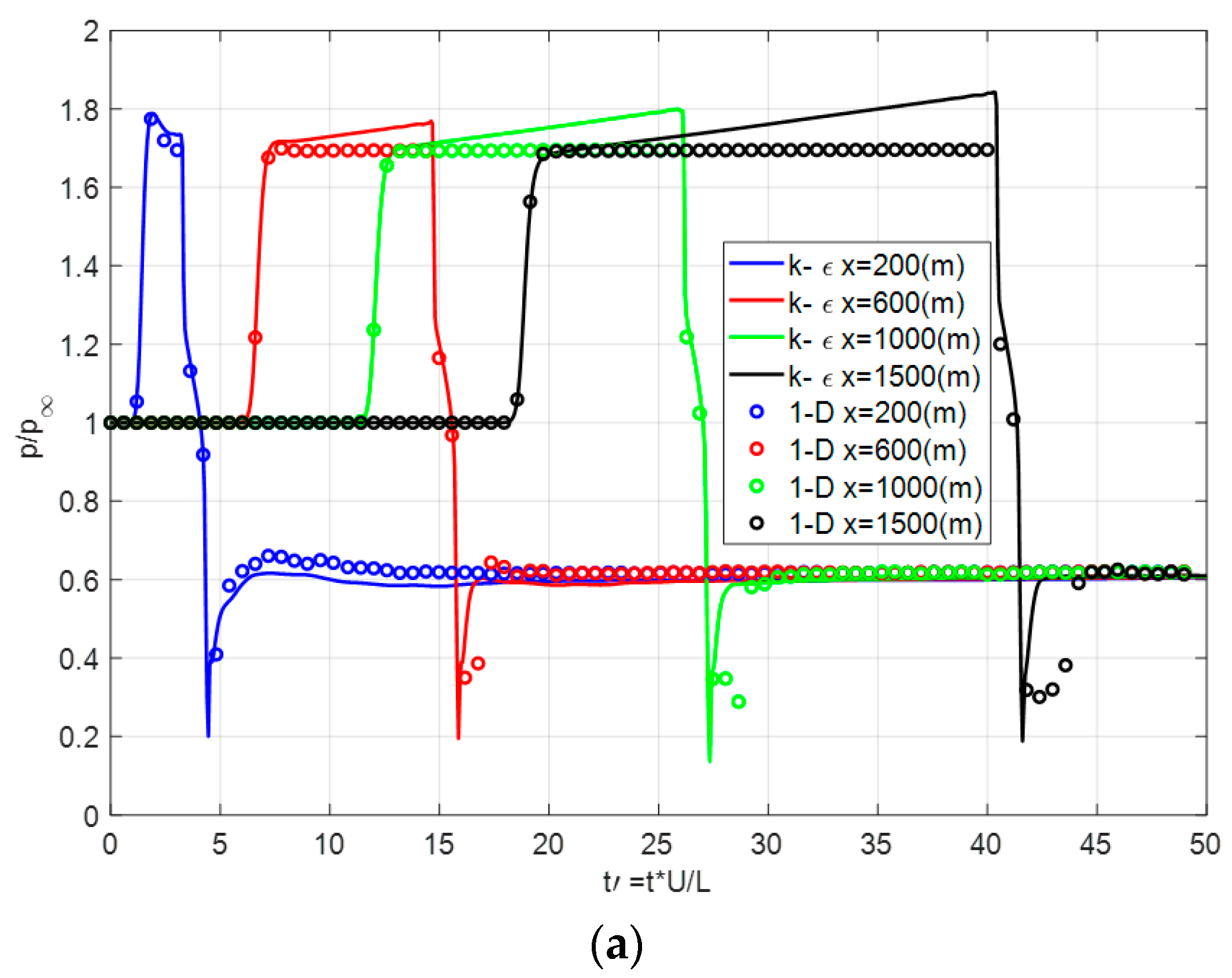
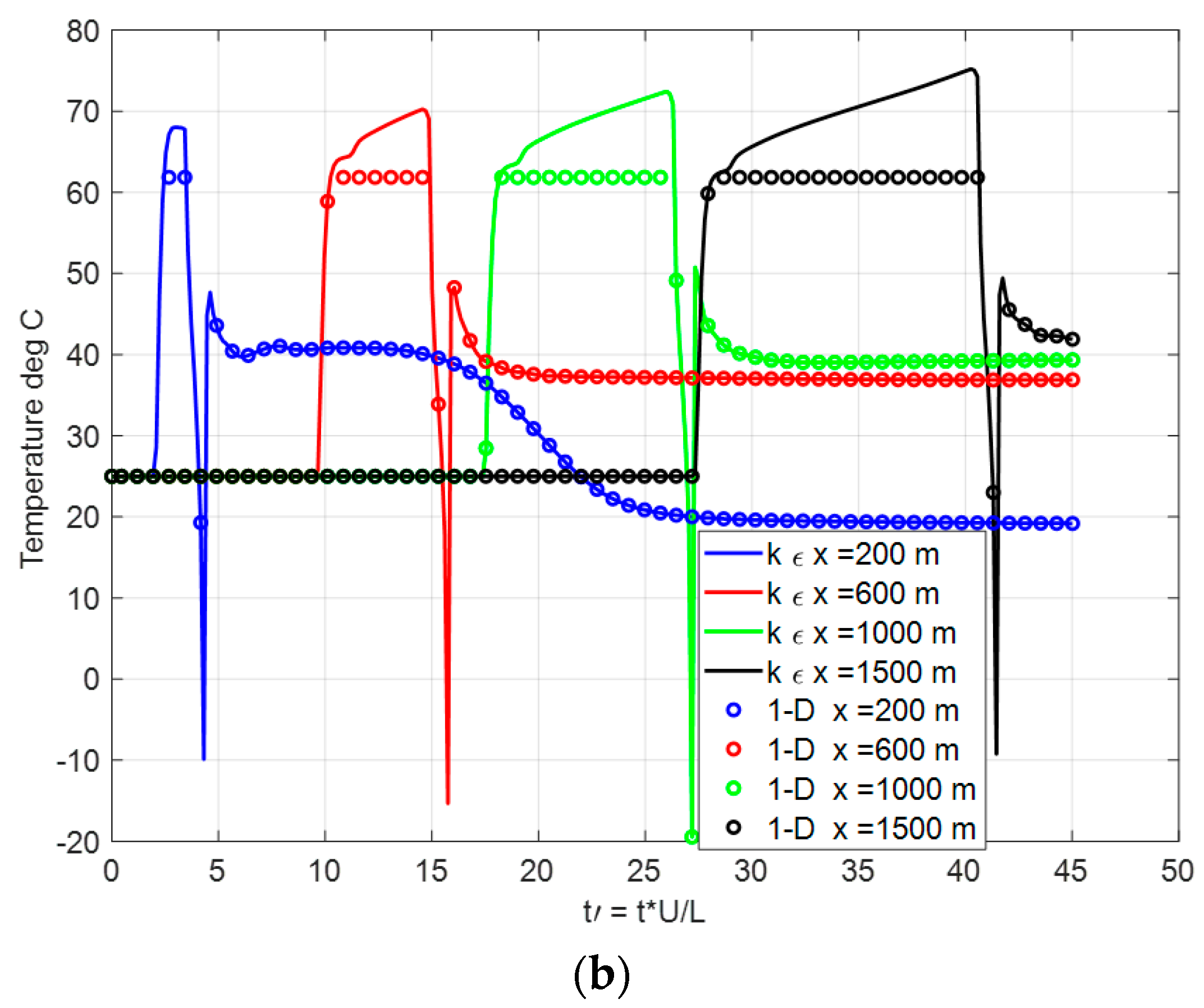
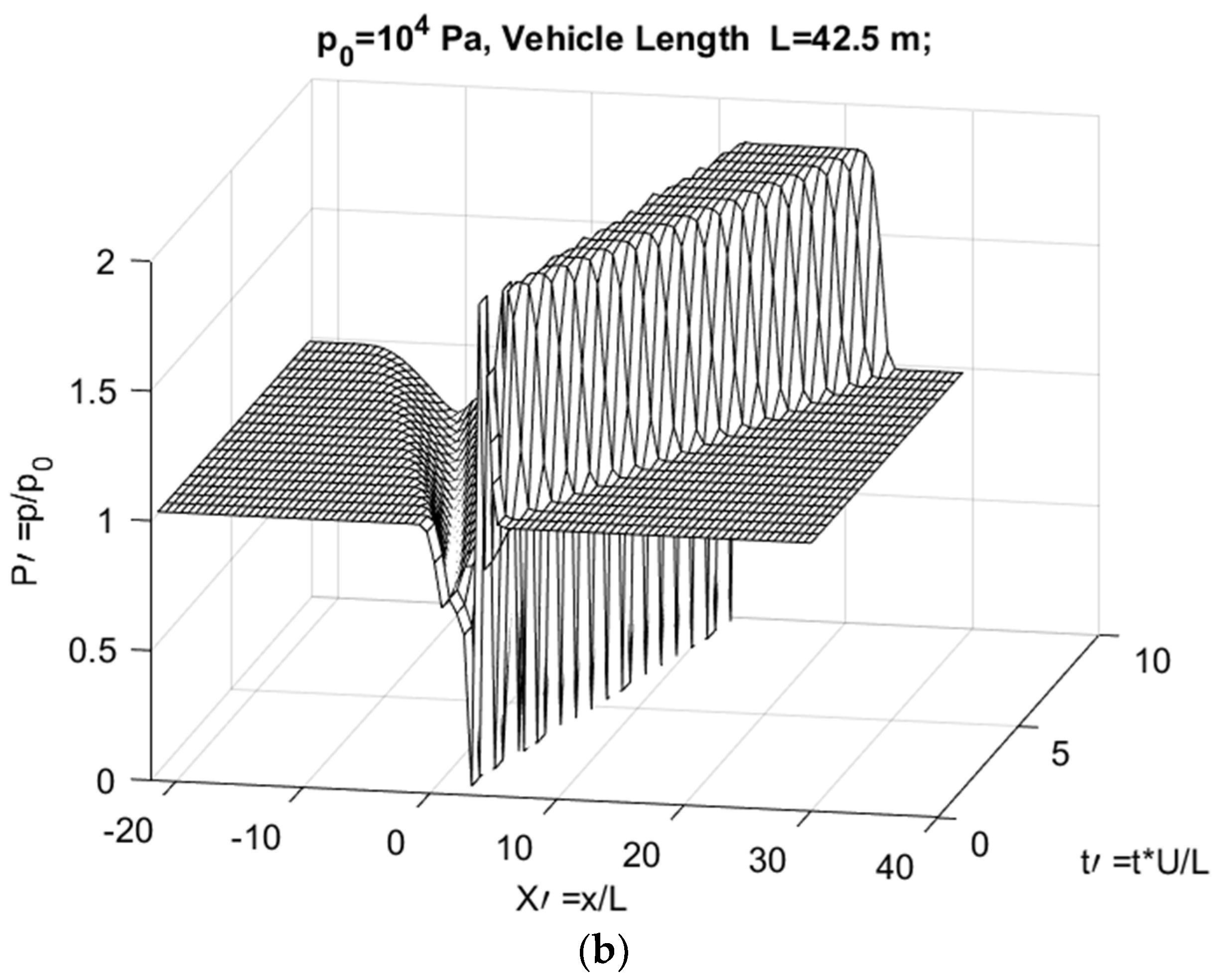
4.4. Comparing the Developed Algorithm with the 2-D CFD Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| Vehicle area varied along vehicle’s x-axis, i.e., Av = f(x) | |
| area between pod and tube | |
| a | speed of sound |
| Cp | pressure coefficient or specific heat at constant pressure |
| Cf | skin friction coefficient |
| convection heat transfer coefficient | |
| D | drag component |
| pod diameter | |
| dt | time step |
| vehicle’s length | |
| M | Mach number |
| mass flow rate | |
| operating pressure | |
| heat transfer rate | |
| vehicle’s heat transfer rate | |
| R | gas constant |
| Tw | wall temperature |
| adiabatic wall temperature | |
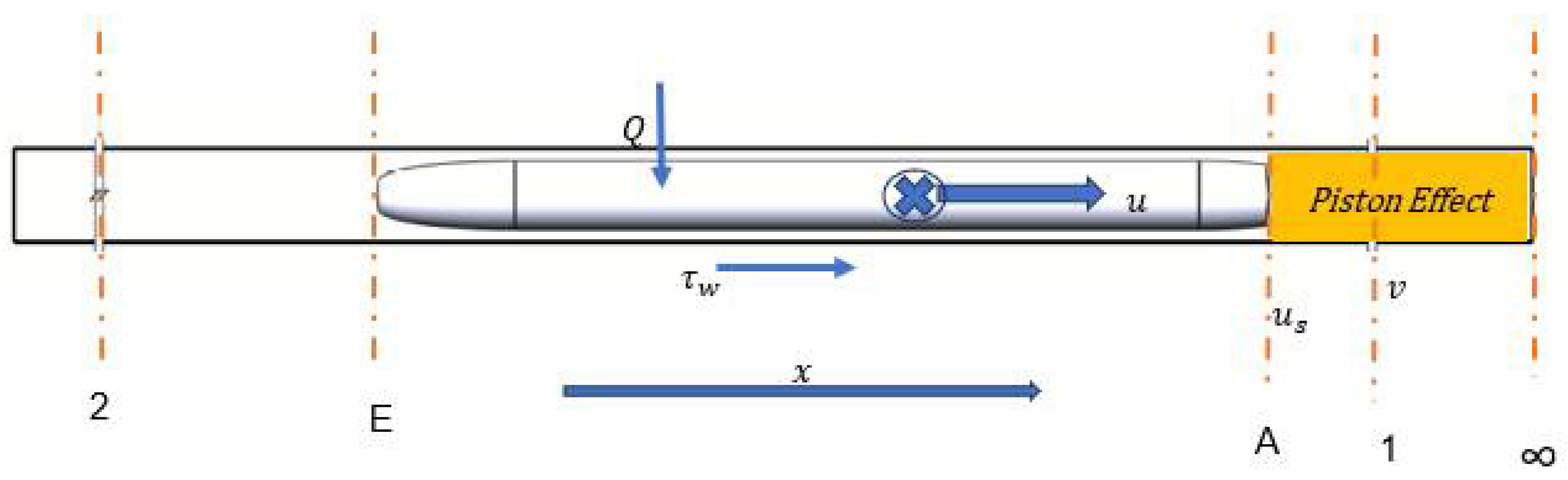
| velocity at point A as per Figure 2 | |
| v | velocity at point 1 as per Figure 2 |
| u | velocity at arbitrary point in the vehicle |
| for ideal air | |
| friction parameter | |
| ρ | density |
| wall shear stress |
References
- Foa, J.V. Transfortation Means and Method; Springer: Berlin/Heidelberg, Germany, 1965. [Google Scholar]
- Woods, W.A.; Pope, C.W. A Generalised Flow Prediction Method for the Unsteady Flow Generated by a Train in a Single-Track Tunnel. J. Wind Eng. Ind. Aerodyn. 1981, 7, 331–360. [Google Scholar] [CrossRef]
- Hammitt, A.G. Aerodynamics of Vehicles in Finite Length Tubes; No. FRA-ORD&D-74-10; Federal Railroads Administration: Washington, DC, USA, 1974.
- Hammitt, A.G. Aerodynamic Analysis of Tube Vehicle Systems. AIAA J. 1972, 10, 282–290. [Google Scholar] [CrossRef]
- Ross, P.E. Hyperloop: No Pressure: The Vacuum Train Project Will Get Its First Test Track This Year. IEEE Spectr. 2016, 53, 51–54. [Google Scholar] [CrossRef]
- Noh, H.M. Wind Tunnel Test Analysis to Determine Pantograph Noise Contribution on a High-Speed Train. Adv. Mech. Eng. 2019, 11, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Yang, M.; Du, J.; Li, Z.; Huang, S.; Zhou, D. Moving Model Test of High-Speed Train Aerodynamic Drag Based on Stagnation Pressure Measurements. PLoS ONE 2017, 12, e0169471. [Google Scholar] [CrossRef]
- Lluesma-Rodríguez, F.; González, T.; Hoyas, S. CFD Simulation of a Hyperloop Capsule inside a Closed Environment. Results Eng. 2021, 9, 2020–2022. [Google Scholar] [CrossRef]
- Khayrullina, A.; Blocken, B.; Janssen, W.; Straathof, J. CFD Simulation of Train Aerodynamics: Train-Induced Wind Conditions at an Underground Railroad Passenger Platform. J. Wind Eng. Ind. Aerodyn. 2015, 139, 100–110. [Google Scholar] [CrossRef]
- Zhou, P.; Zhang, J.; Li, T.; Zhang, W. Numerical Study on Wave Phenomena Produced by the Super High-Speed Evacuated Tube Maglev Train. J. Wind Eng. Ind. Aerodyn. 2019, 190, 61–70. [Google Scholar] [CrossRef]
- Riva, N.; Benedetti, L.; Sajó, Z. Modeling the Hyperloop with COMSOL Multiphysics®: On the Aerodynamics Design of the EPFLoop Capsule. In Proceedings of the 2018 COMSOL Conference, Lausanne, Switzerland, 22–24 October 2018; pp. 1–7. [Google Scholar]
- Opgenoord, M.M.J.; Caplan, P.C. On the Aerodynamic Design of the Hyperloop Concept. In Proceedings of the 35th AIAA Applied Aerodynamics Conference 2017, Denver, CO, USA, 5–9 June 2017; pp. 1–16. [Google Scholar] [CrossRef] [Green Version]
- Sui, Y.; Niu, J.; Ricco, P.; Yuan, Y.; Yu, Q.; Cao, X.; Yang, X. Impact of Vacuum Degree on the Aerodynamics of a High-Speed Train Capsule Running in a Tube. Int. J. Heat Fluid Flow 2021, 88, 108752. [Google Scholar] [CrossRef]
- Opgenoord, M.M.; Caplan, P. MIT Hyperloop Final Report. MIT Hyperloop Team 2017, 134. [Google Scholar]
- Oh, J.S.; Kang, T.; Ham, S.; Lee, K.S.; Jang, Y.J.; Ryou, H.S.; Ryu, J. Numerical Analysis of Aerodynamic Characteristics of Hyperloop System. Energies 2019, 12, 518. [Google Scholar] [CrossRef] [Green Version]
- Decker, K.; Chin, J.; Peng, A.; Summers, C.; Nguyen, G.; Oberlander, A.; Sakib, G.; Sharifrazi, N.; Heath, C.; Gray, J.; et al. Conceptual Feasibility Study of the Hyperloop Vehicle for Next-Generation Transport. In Proceedings of the AIAA SciTech Forum—55th AIAA Aerospace Sciences Meeting, AIAA 2017-0221, Grapevine, TX, USA, 9–13 January 2017; pp. 1–22. [Google Scholar] [CrossRef]
- Raghunathan, R.S.; Kim, H.D.; Setoguchi, T. Aerodynamics of High-Speed Railway Train. Prog. Aerosp. Sci. 2002, 38, 469–514. [Google Scholar] [CrossRef]
- Kim, T.K.; Kim, K.H.; Kwon, H. Bin Aerodynamic Characteristics of a Tube Train. J. Wind Eng. Ind. Aerodyn. 2011, 99, 1187–1196. [Google Scholar] [CrossRef]
- Jang, K.S.; Le, T.T.G.; Kim, J.; Lee, K.S.; Ryu, J. Effects of Compressible Flow Phenomena on Aerodynamic Characteristics in Hyperloop System. Aerosp. Sci. Technol. 2021, 117, 106970. [Google Scholar] [CrossRef]
- Kang, H.; Jin, Y.; Kwon, H.; Kim, K. A Study on the Aerodynamic Drag of Transonic Vehicle in Evacuated Tube Using Computational Fluid Dynamics. Int. J. Aeronaut. Sp. Sci. 2017, 18, 614–622. [Google Scholar] [CrossRef]
- Kollmann, W. Computational Fluid Dynamics, Vki-Book; Hemisphere Publishing Corp.: Washington, DC, USA, 1980; Volume 2, ISBN 3804204422. [Google Scholar]
- Lluesma-Rodríguez, F.; González, T.; Hoyas, S. Cfd Simulation of a Hyperloop Capsule inside a Low-Pressure Environment Using an Aerodynamic Compressor as Propulsion and Drag Reduction Method. Appl. Sci. 2021, 11, 3934. [Google Scholar] [CrossRef]
- Rivero, J.M.; González-Martínez, E.; Rodríguez-Fernández, M. Description of the Flow Equations around a High Speed Train inside a Tunnel. J. Wind Eng. Ind. Aerodyn. 2018, 172, 212–229. [Google Scholar] [CrossRef]
- Rodríguez-, M.; Rivero, J.M.; Gonz, E.; González-Martínez, E.; Rodríguez-Fernández, M. A Methodology for the Prediction of the Sonic Boom in Tunnels of High-Speed Trains. J. Sound Vib. 2019, 446, 37–56. [Google Scholar] [CrossRef]
- Gilbert, T.; Baker, C.; Quinn, A. Aerodynamic Pressures around High-Speed Trains: The Transition from Unconfined to Enclosed Spaces. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2013, 227, 609–622. [Google Scholar] [CrossRef]
- William-Louis, M.; Tournier, C. A Wave Signature Based Method for the Prediction of Pressure Transients in Railway Tunnels. J. Wind Eng. Ind. Aerodyn. 2005, 93, 521–531. [Google Scholar] [CrossRef]
- Hammitt, A.G. Unsteady Aerodynamics of Vehicles in Tubes. AIAA J. 1975, 13, 497–501. [Google Scholar] [CrossRef]
- Sajben, M. Fluid Mechanics of Train-Tunnel Systems in Unsteady Motion. AIAA J. 1971, 9, 1538–1545. [Google Scholar] [CrossRef]
- Sugimoto, N. Acoustic Analysis of the Pressure Field Generated by Acceleration of a Train in a Long Tunnel. J. Comput. Acoust. 1999, 7, 207–224. [Google Scholar] [CrossRef]
- Fukuda, T.; Ozawa, S.; Iida, M.; Takasaki, T.; Wakabayashi, Y. Distortion of Compression Wave Propagating through Very Long Tunnel with Slab Tracks. JSME Int. J. Ser. B Fluids Therm. Eng. 2007, 49, 1156–1164. [Google Scholar] [CrossRef] [Green Version]
- Miyachi, T.; Ozawa, S.; Fukuda, T.; Iida, M. A New Simple Equation Governing Distortion of Compression Wave Propagating Through Shinkansen Tunnel with Slab Tracks. J. Fluid Sci. Technol. 2013, 8, 60–73. [Google Scholar] [CrossRef] [Green Version]
- Miyachi, T.; Saito, S.; Fukuda, T.; Sakuma, Y.; Ozawa, S.; Arai, T.; Sakaue, S.; Nakamura, S. Propagation Characteristics of Tunnel Compression Waves with Multiple Peaks in the Waveform of the Pressure Gradient: Part 1: Field Measurements and Mathematical Model. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2015, 230, 1297–1308. [Google Scholar] [CrossRef]
- Aoki, T.; Yamamoto, J.; Nagatani, K. Characteristics of a Compression Wave Propagating over Porous Plate Wall in a High-Speed Railway Tunnel. J. Therm. Sci. 2008, 17, 218–223. [Google Scholar] [CrossRef]
- Akbari, P.; Bermudes, L. Shock Waves in Narrow Channels and Their Applications for High-Efficiency Unsteady Wave Engines. SAE Tech. Pap. 2017. [Google Scholar] [CrossRef]
- Chen, C.-H.; Lee, L.H. Computing Budget Allocation. In Stochastic Simulation Optimization; World Scientific Publishing Co Pte Ltd.: Singapore, 2010; pp. 15–28. [Google Scholar] [CrossRef]
- Baron, A.; Mossi, M.; Sibilla, S. The Alleviation of the Aerodynamic Drag and Wave Effects of High-Speed Trains in Very Long Tunnels. J. Wind Eng. Ind. Aerodyn. 2001, 89, 365–401. [Google Scholar] [CrossRef]
- Kim, J.; Jang, K.S.; Le, T.T.G.; Lee, K.S.; Ryu, J. Theoretical and Numerical Analysis of Pressure Waves and Aerodynamic Characteristics in Hyperloop System under Cracked-Tube Conditions. Aerosp. Sci. Technol. 2022, 123, 107458. [Google Scholar] [CrossRef]
- Transportation, M.; Wu, C.; Gao, X.; Gao, P. Characteristic Analysis of Air Pressure Wave Generated by High-Speed Trains Traveling through a Tunnel. J. Mod. Transp. 2012, 20, 31–35. [Google Scholar] [CrossRef] [Green Version]
- Miyachi, T. Acoustic Model of Micro-Pressure Wave Emission from a High-Speed Train Tunnel. J. Sound Vib. 2017, 391, 127–152. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, J.; Li, T.; Zhang, W. Aerodynamic Performances and Vehicle Dynamic Response of High-Speed Trains Passing Each Other. J. Mod. Transp. 2012, 20, 36–43. [Google Scholar] [CrossRef] [Green Version]
- Alsawy, T.; Abdel Gawad, A.F. Effect of Twist of a Wide-Chord Fan-Blade on the Aerodynamic Performance of the Fan of a High-Bypass Turbofan Engine. In Proceedings of the Thirteenth International Conference of Fluid Dynamics, Cairo, Egypt, 21–22 December 2018; ICFD13-EG-6S01. [Google Scholar]
- Chan, W.M.; Gomez, R.J., III; Rogers, S.E.; Buning, P.G. Best Practices in Overset Grid Generation. In Proceedings of the 32nd AIAA Fluid Dynamics Conference, St. Louis, MI, USA, 24–26 June 2002. AIAA paper 2002-3191. [Google Scholar]
- Chan, W.M. Advances in Software Tools for Pre-Processing and Post-Processing of Overset Grid Computations. In Proceedings of the 9th International Conference on Numerical Grid Generation in Computational Field Simulations, San Jose, CA, USA, 11–18 June 2005; pp. 1–8. [Google Scholar]
- Le, T.T.G.; Jang, K.S.; Lee, K.S.; Ryu, J. Numerical Investigation of Aerodynamic Drag and Pressurewaves in Hyperloop Systems. Mathematics 2020, 8, 1973. [Google Scholar] [CrossRef]
- Scheidegger, T. Overset Meshing in ANSYS Fluent; ANSYS Inc.: Canonsburg, PA, USA, 2016. [Google Scholar]
- Nerinckx, K.; Vierendeels, J.; Dick, E. A Mach-Uniform Pressure-Correction Algorithm with AUSM+ Flux Definitions. Int. J. Numer. Methods Heat Fluid Flow 2006, 16, 718–739. [Google Scholar] [CrossRef]
- Bardina, J.E.; Huang, P.G.; Coakley, T.J. Turbulence Modeling Validation. In Proceedings of the 28th Fluid Dynamics Conference, Snowmass Village, CO, USA, 29 June–2 July 1997. [Google Scholar] [CrossRef]
- Toro, E.F. Riemann Solvers and Numerical Methods for Fluid Dynamics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009; ISBN 9783540252023. [Google Scholar]
- Hussaini, M.Y.; van Leer, B.; Van Rosendale, J. Upwind and High-Resolution Schemes; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; ISBN 9783642644528. [Google Scholar]
- Bose, A.; Viswanathan, V.K. Mitigating the Piston Effect in High-Speed Hyperloop Transportation: A Study on the Use of Aerofoils. Energies 2021, 14, 464. [Google Scholar] [CrossRef]
- Wong, F.T. Aerodynamic Design and Optimization of a Hyperloop Vehicle; TU Delft: Delft, The Netherlands, 2018. [Google Scholar]
- Herrmann Schlichting, K.G. Boundary-Layer Theory; Springer: Berlin Heidelberg, Germany, 2000; ISBN 9783642858314. [Google Scholar]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000; Volume 13. [Google Scholar]
- Bertin, J.J.; Smith, M.L. Aerodynamics for Engineers, 6th ed.; Pearson Education Limited: Edinburgh, UK, 2014; Volume 3, ISBN 10: 0-273-79327-6. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Operating Pressure | ||
| Operating Temperature (k) | 300 k | |
| Vehicle’s Diameter | 3.75 m | |
| Tube Diameter | 5.0 m | |
| Vehicle’s Length | 41 m | |
| Vehicle’s Mach No. | 0.60 | |
| Baseline Design Blockage Ratio | 0.56 |
| Overset Zone | Background Zone | Number of Elements | |
|---|---|---|---|
| Coarse | 50 × 150 | 50 × 7500 | 382,500 |
| Medium | 75 × 200 | 75 × 7500 | 577,500 |
| Fine | 100 × 500 | 100 × 10,000 | 1,050,000 |
| Calculation Time for 1 s Motion | Difference in Drag Force Estimations (Compared with Fine Grid) | ||
|---|---|---|---|
| CFD | Coarse grid | 24 h | 96% |
| Medium grid | 28 h | 97% | |
| Fine grid | 32 h | - | |
| 1-D Method of Characteristics (current) | 15 min | 95% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdulla, M.; Juhany, K.A. A Rapid Solver for the Prediction of Flow-Field of High-Speed Vehicle Moving in a Tube. Energies 2022, 15, 6074. https://doi.org/10.3390/en15166074
Abdulla M, Juhany KA. A Rapid Solver for the Prediction of Flow-Field of High-Speed Vehicle Moving in a Tube. Energies. 2022; 15(16):6074. https://doi.org/10.3390/en15166074
Chicago/Turabian StyleAbdulla, Mohammed, and Khalid A. Juhany. 2022. "A Rapid Solver for the Prediction of Flow-Field of High-Speed Vehicle Moving in a Tube" Energies 15, no. 16: 6074. https://doi.org/10.3390/en15166074