
Effectiveness of Energy Transfer versus Mixing Entropy in Coupled Mechanical–Electrical Oscillators


Abstract
:1. Introduction
2. System and Governing Equations
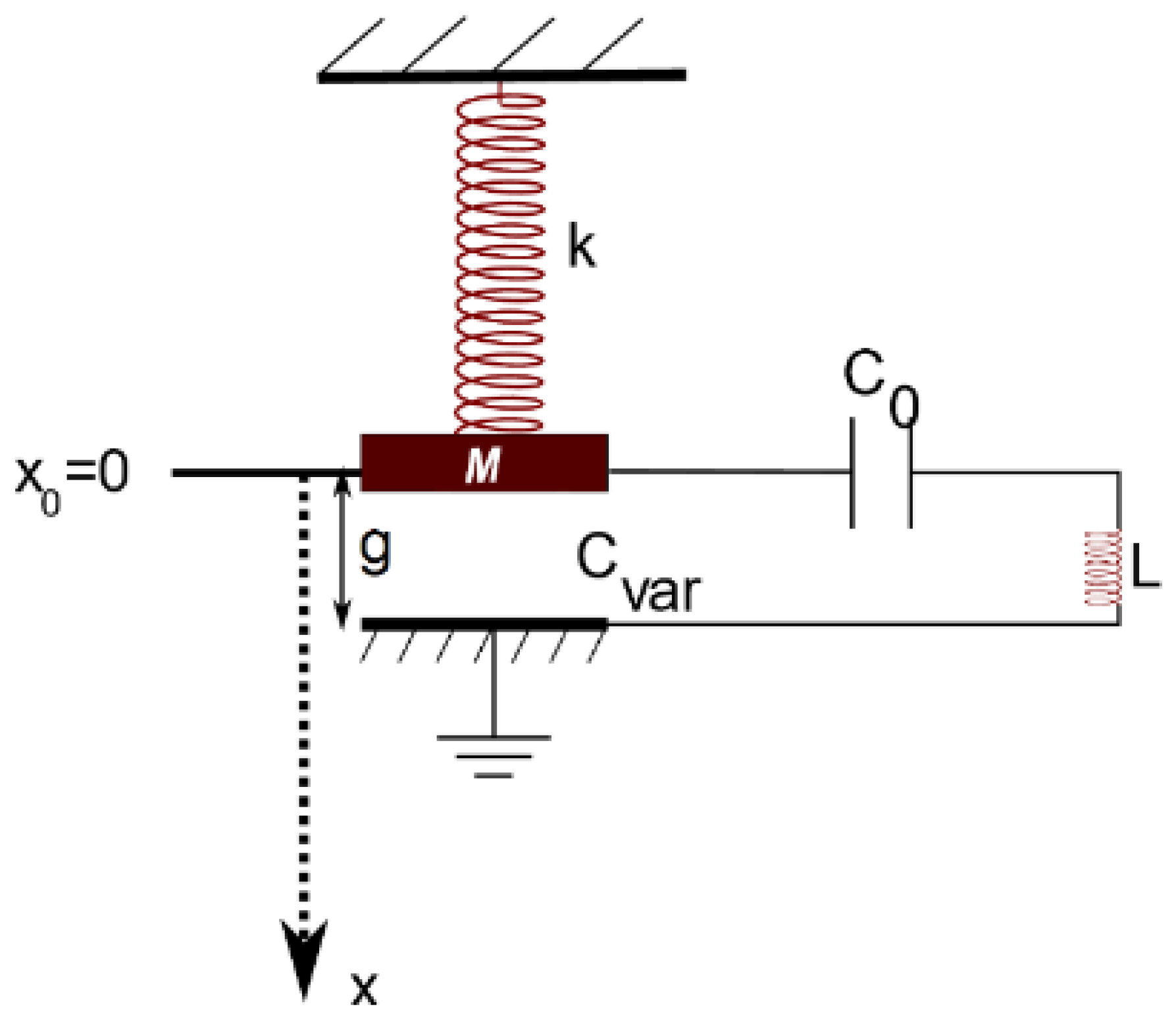
2.1. System Description
2.2. Governing Equations
2.3. Normalized Governing Equations
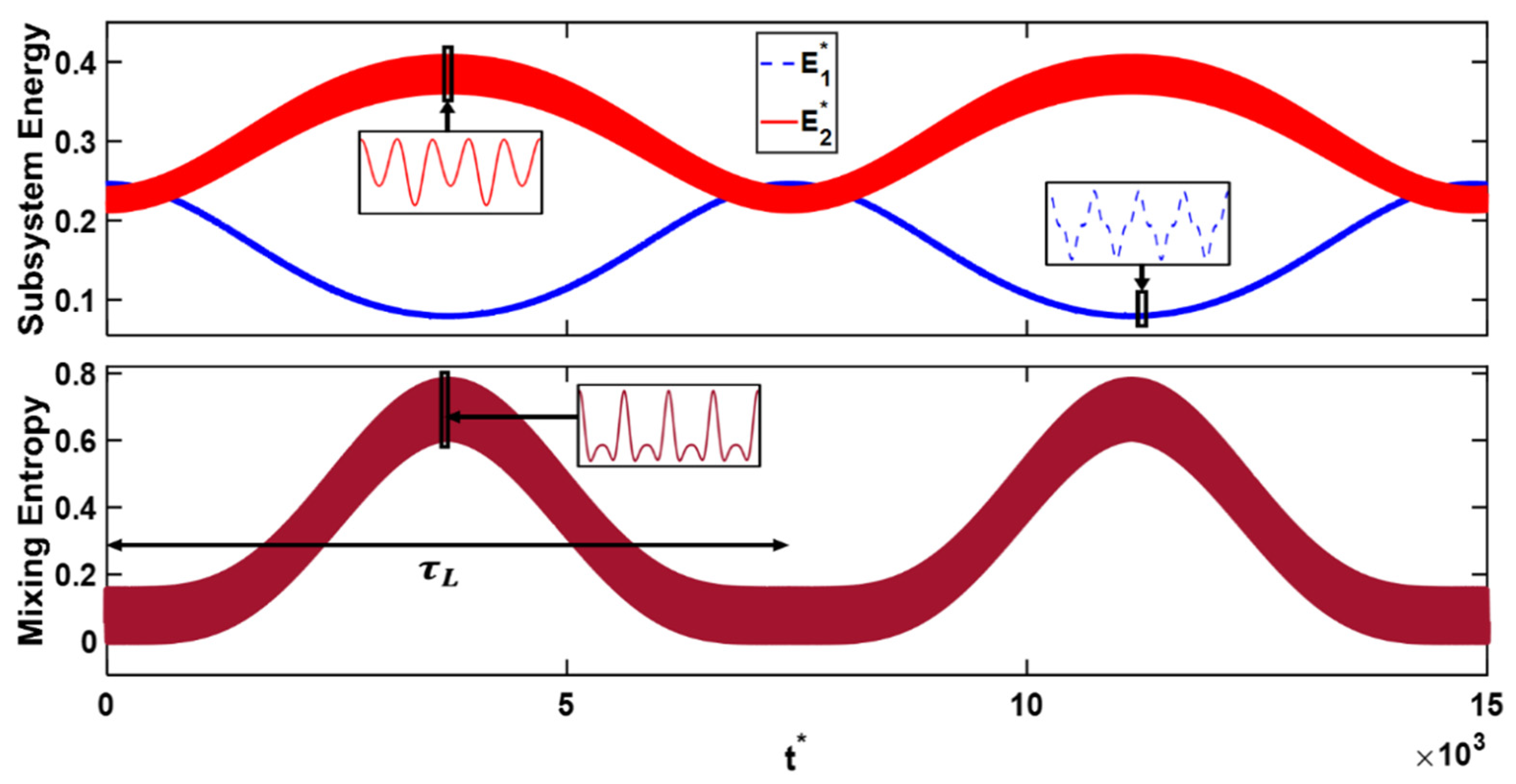
2.4. Effectiveness and Mixing Entropy
3. Results and Discussion
3.1. Increasing the Initial Energy of One Domain Only (Mechanical or Electrical)
3.2. Changing the Ratio of the Mechanical to Electrical Energy at Constant System’s Total Energy
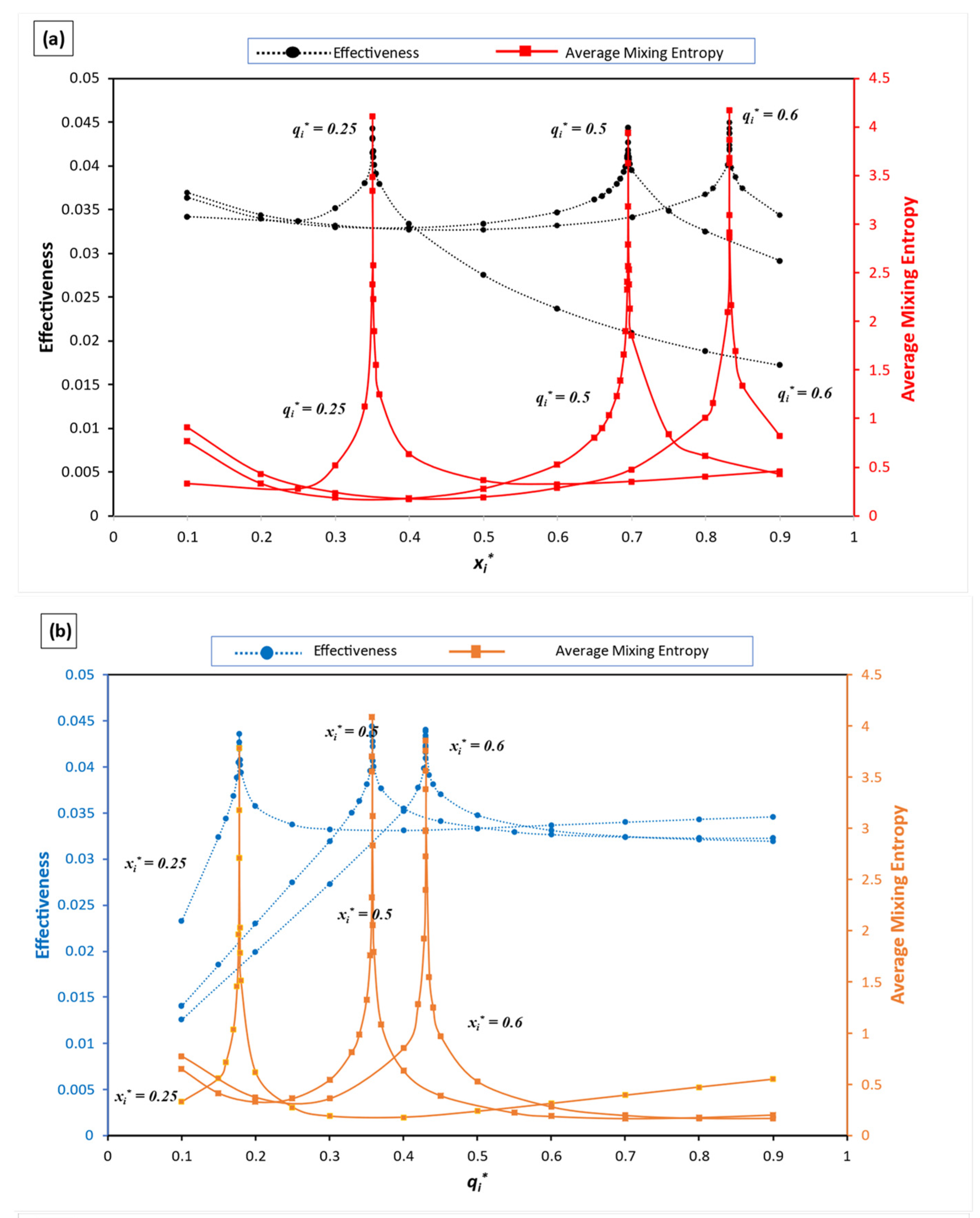
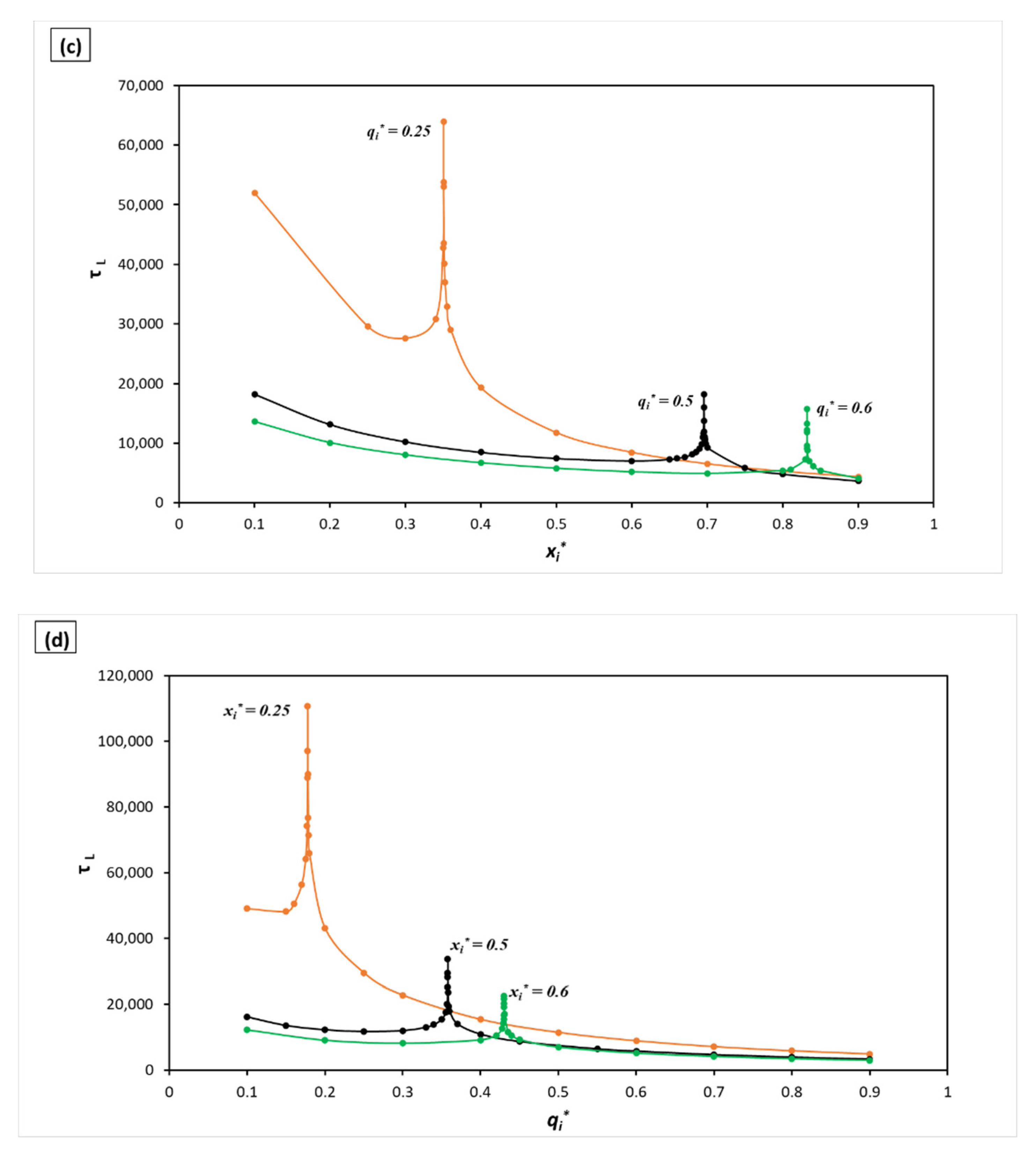
3.3. Varying and
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xidasiot.com. 2022. Available online: https://xidasiot.com/power/veg (accessed on 23 July 2022).
- Enoceoan. Available online: https://www.enocean.com/ (accessed on 23 July 2022).
- Mide. Available online: http://www.mide.com/ (accessed on 23 July 2022).
- Piezo. Available online: https://www.piezo.com/ (accessed on 23 July 2022).
- Mitcheson, P.D.; Yeatman, E.M.; Rao, G.K.; Holmes, A.S.; Green, T.C. Energy harvesting from human and machine motion for wireless electronic devices. Proc. IEEE 2008, 96, 1457–1486. [Google Scholar] [CrossRef]
- Oxaal, J.; Hella, M.; Borca-Tasciuc, D.A. Electrostatic MEMS vibration energy harvester for HVAC applications with impact-based frequency up-conversion. J. Micromech. Microeng. 2016, 26, 124012. [Google Scholar] [CrossRef]
- Lu, Y.; Juillard, J.; Cottone, F.; Galayko, D.; Basset, P. An impact-coupled MEMS electrostatic kinetic energy harvester and its predictive model taking nonlinear air damping effect into account. J. Microelectromech. Syst. 2018, 27, 1041–1053. [Google Scholar] [CrossRef]
- Li, J.; Tichy, J.; Borca-Tasciuc, D.A. A predictive model for electrostatic energy harvesters with impact-based frequency up-conversion. J. Micromech. Microeng. 2020, 30, 125012. [Google Scholar] [CrossRef]
- Li, J.; Tong, X.; Oxaal, J.; Liu, Z.; Hella, M.; Borca-Tasciuc, D.A. Investigation of parallel-connected MEMS electrostatic energy harvesters for enhancing output power over a wide frequency range. J. Micromech. Microeng. 2019, 29, 094001. [Google Scholar] [CrossRef]
- Tvedt, L.G.W.; Nguyen, D.S.; Halvorsen, E. Nonlinear behavior of an electrostatic energy harvester under wide-and narrowband excitation. J. Microelectromech. Syst. 2010, 19, 305–316. [Google Scholar] [CrossRef]
- Lu, Y.; Cottone, F.; Boisseau, S.; Marty, F.; Galayko, D.; Basset, P. A nonlinear MEMS electrostatic kinetic energy harvester for human-powered biomedical devices. Appl. Phys. Lett. 2015, 107, 253902. [Google Scholar] [CrossRef]
- Honma, H.; Mitsuya, H.; Hashiguchi, G.; Fujita, H.; Toshiyoshi, H. Improvement of energy conversion effectiveness and maximum output power of electrostatic induction-type MEMS energy harvesters by using symmetric comb-electrode structures. J. Micromech. Microeng. 2018, 28, 064005. [Google Scholar] [CrossRef]
- Roundy, S. On the effectiveness of vibration-based energy harvesting. J. Intell. Mater. Syst. Struct. 2005, 16, 809–823. [Google Scholar] [CrossRef]
- Halvorsen, E. Electrostatic energy harvesters and fundamental limits to power. J. Phys. Conf. Ser. 2018, 1052, 012004. [Google Scholar] [CrossRef]
- Toshiyoshi, H.; Ju, S.; Honma, H.; Ji, C.H.; Fujita, H. MEMS vibrational energy harvesters. Sci. Technol. Adv. Mater. 2019, 20, 124–143. [Google Scholar] [CrossRef] [PubMed]
- Martinelli, M. Entropy, carnot cycle, and information theory. Entropy 2019, 21, 3. [Google Scholar] [CrossRef]
- Tavares, J.M.; Patricio, P. Maximum thermodynamic power coefficient of a wind turbine. Wind Energy 2020, 23, 1077–1084. [Google Scholar] [CrossRef]
- Kostic, M.M. Revisiting the second law of energy degradation and entropy generation: From Sadi Carnot’s ingenious reasoning to holistic generalization. AIP Conf. Proc. 2011, 1411, 327–350. [Google Scholar]
- Haddad, W.M. Thermodynamics: The unique universal science. Entropy 2017, 19, 621. [Google Scholar] [CrossRef]
- Dicer, I.; Cengel, Y.A. Energy, Entropy and Exergy Concepts and Their Roles in Thermal Engineering. Entropy 2001, 3, 116–149. [Google Scholar] [CrossRef]
- Wu, J.; Guo, Z.Y. Entropy and its correlations with other related quantities. Entropy 2014, 16, 1089–1100. [Google Scholar] [CrossRef]
- Zorich, V.A. Entropy in thermodynamics and information theory. Probl. Inf. Transm. 2022, 58, 3–11. [Google Scholar] [CrossRef]
- Sunar, M.; Sahin, A.Z.; Yilbas, B.S. Entropy generation rate in a mechanical system subjected to a damped oscillation. Int. J. Exergy 2015, 17, 401–411. [Google Scholar] [CrossRef]
- Le Bot, A. Entropy in statistical energy analysis. J. Acoust. Soc. Am. 2009, 125, 1473–1478. [Google Scholar] [CrossRef]
- Prajwal, K.T.; Manickavasagam, K.; Suresh, R. A review on vibration energy harvesting technologies: Analysis and technologies. Eur. Phys. J. Spec. Top. 2022, 231, 1359–1371. [Google Scholar] [CrossRef]
- Lensvelt, R.; Fey, R.H.B.; Mestrom, R.M.C.; Nijmeijer, H. Design and numerical analysis of an electrostatic energy harvester with impact for frequency up-conversion. J. Comput. Nonlinear Dyn. 2020, 15, 1–8. [Google Scholar] [CrossRef]
- Yamane, D.; Tamura, K.; Nota, K.; Iwakawa, R.; Lo, C.-Y.; Miwa, K.; Ono, S. Contactless Electrostatic Vibration Energy Harvesting Using Electric Double Layer Electrets. Sensors Mater. 2022, 34, 1869. [Google Scholar] [CrossRef]
- Mahmud, M.A.P.; Bazaz, S.R.; Dabiri, S.; Mehrizi, A.A.; Asadnia, M.; Warkiani, M.E.; Wang, Z.L. Advances in MEMS and Microfluidics-Based Energy Harvesting Technologies. Adv. Mater. Technol. 2022, 2101347, 1–30. [Google Scholar] [CrossRef]
- Lyon, R.H.; Maidanik, G. Power Flow between Linearly Coupled Oscillators. J. Acoust. Soc. Am. 1962, 34, 623–639. [Google Scholar] [CrossRef]
- Carcaterra, A. An entropy formulation for the analysis of energy flow between mechanical resonators. Mech. Syst. Signal. Process. 2002, 16, 905–920. [Google Scholar] [CrossRef]
- Le Bot, A. Entropy in sound and vibration: Towards a new paradigm. Proc. R. Soc. A Math. Phys. Eng. Sci. 2017, 473, 20160602. [Google Scholar] [CrossRef]
- Tufano, D.; Sotoudeh, Z. Exploring the entropy concept for coupled oscillators. Int. J. Eng. Sci. 2017, 112, 18–31. [Google Scholar] [CrossRef]
- Tufano, D.A.; Sotoudeh, Z. Entropy for Strongly Coupled Oscillators. J. Vib. Acoust. Trans. ASME 2018, 140, 1–8. [Google Scholar] [CrossRef]
- Berdichevsky, V. Thermodynamics of Chaos and Order; Addison Wesley Longman Limited: Harlow, UK, 1997. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average Mixing Entropy | Effectiveness | ||
|---|---|---|---|
| 0.03 | 0.03 | 4.359 | 0.013 |
| 0.03 | 0.1 | 4.325 | 0.044 |
| 0.1 | 0.03 | 4.966 | 0.013 |
| 0.1 | 0.1 | 4.174 | 0.044 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouro-Koura, H.; Sotoudeh, Z.; Tichy, J.; Borca-Tasciuc, D.-A. Effectiveness of Energy Transfer versus Mixing Entropy in Coupled Mechanical–Electrical Oscillators. Energies 2022, 15, 6105. https://doi.org/10.3390/en15176105
Ouro-Koura H, Sotoudeh Z, Tichy J, Borca-Tasciuc D-A. Effectiveness of Energy Transfer versus Mixing Entropy in Coupled Mechanical–Electrical Oscillators. Energies. 2022; 15(17):6105. https://doi.org/10.3390/en15176105
Chicago/Turabian StyleOuro-Koura, Habilou, Zahra Sotoudeh, John Tichy, and Diana-Andra Borca-Tasciuc. 2022. "Effectiveness of Energy Transfer versus Mixing Entropy in Coupled Mechanical–Electrical Oscillators" Energies 15, no. 17: 6105. https://doi.org/10.3390/en15176105