
Research on Autonomous Cutting Method of Cantilever Roadheader

Abstract
:1. Introduction
2. Modeling and Analysis of Space Pose of Cantilever Roadheader
2.1. Modeling Method of Space Pose of Roadheader
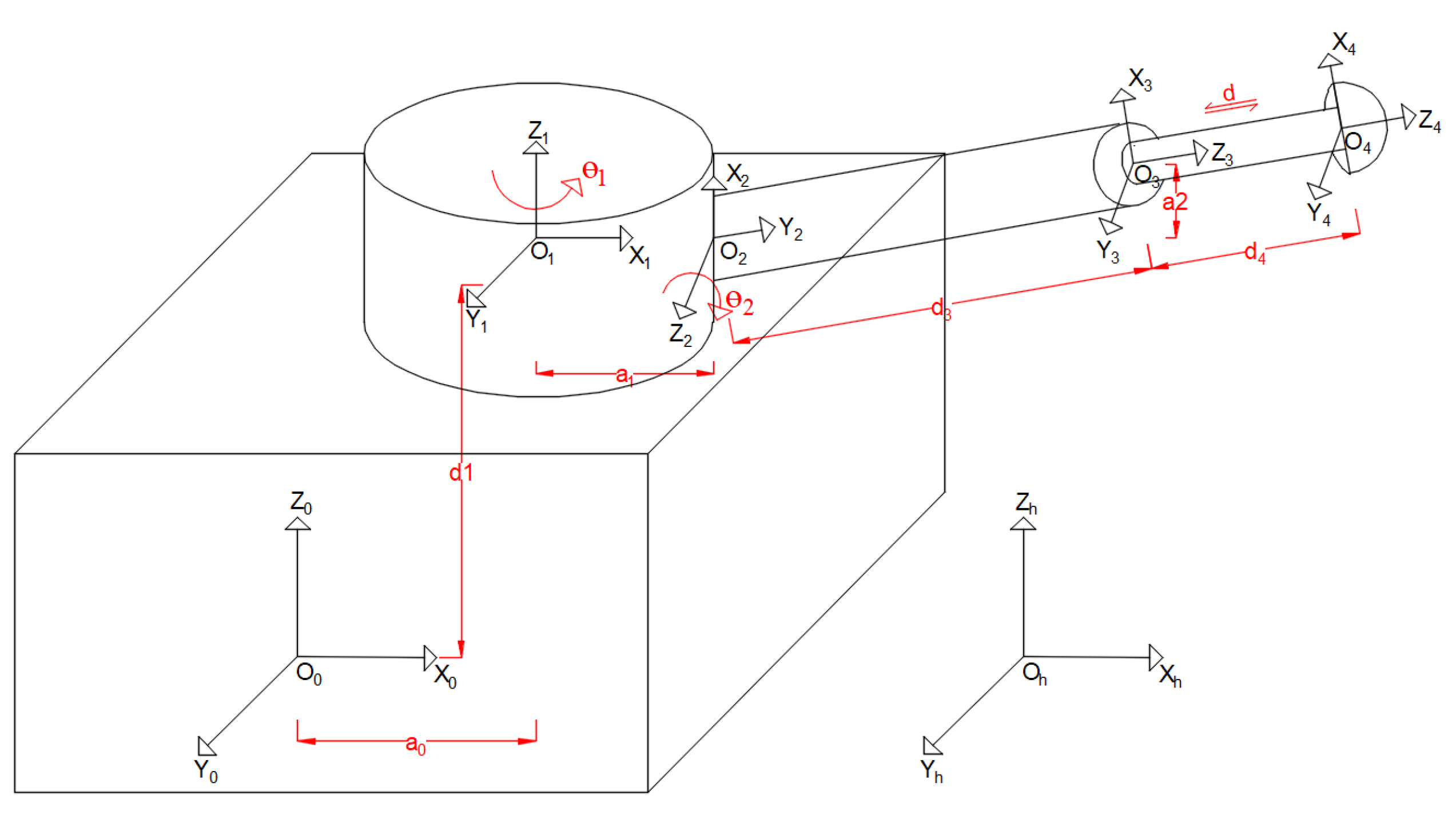
2.2. Establishment of Space Position and Orientation Coordinate System of Roadheader
2.3. Derivation of Space Pose Matrix of Roadheader
2.3.1. Cutting Head to Fuselage Center of Gravity Pose Matrix
2.3.2. Heading Machine Body to Roadway Pose Matrix
2.4. Spatial Pose Analysis of Cutting Head of Roadheader
3. Research on Trajectory Planning and Control of Cantilever Roadheader
3.1. Research on Cantilever Cutting Kinematics of Roadheader
3.2. Cutting Process Path Planning and Control
3.2.1. Determination of Pick Coordinate of Cutting Head
3.2.2. Determination of Inflection Point of Cutting Path
4. Simulation Results and Discussion
5. Conclusions
- (1)
- According to the robot theory and the principle of homogeneous coordinate transformation, the space pose model and space pose coordinate system of the roadheader were established, the connecting rod parameters of each working device of the roadheader were given, and the space pose transformation matrix of the roadheader and the space pose equation of the cutting head of the roadheader were derived. It provides a mathematical model and theoretical basis for the research of an autonomous cutting control system.
- (2)
- The problems of the forward kinematics of the space positioning of the cutting head of the roadheader and the inverse kinematics of the trajectory planning and control of the cutting head were summarized, and the forward kinematics and inverse kinematics were solved. It provides the kinematic theoretical basis for an autonomous cutting control system.
- (3)
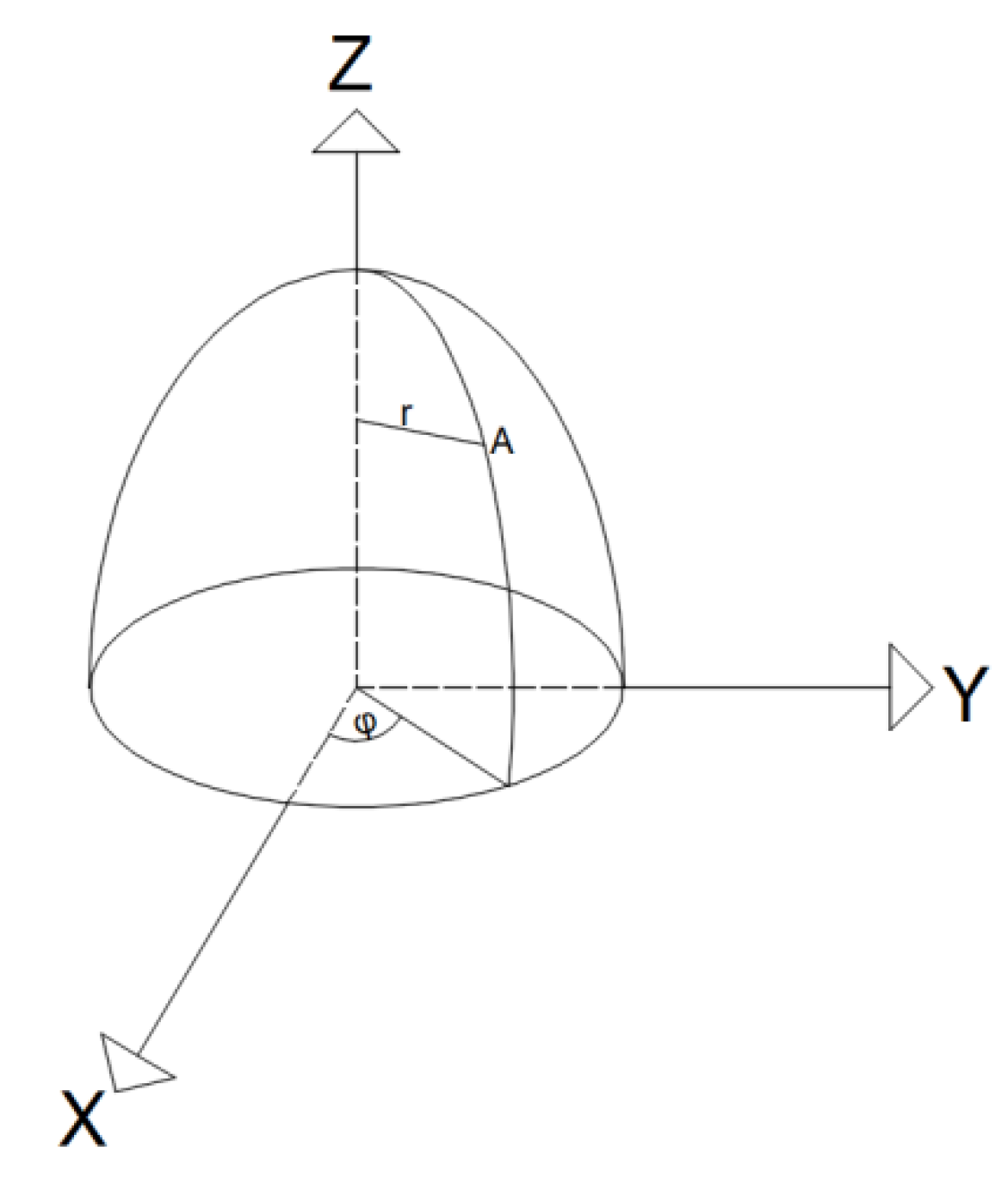
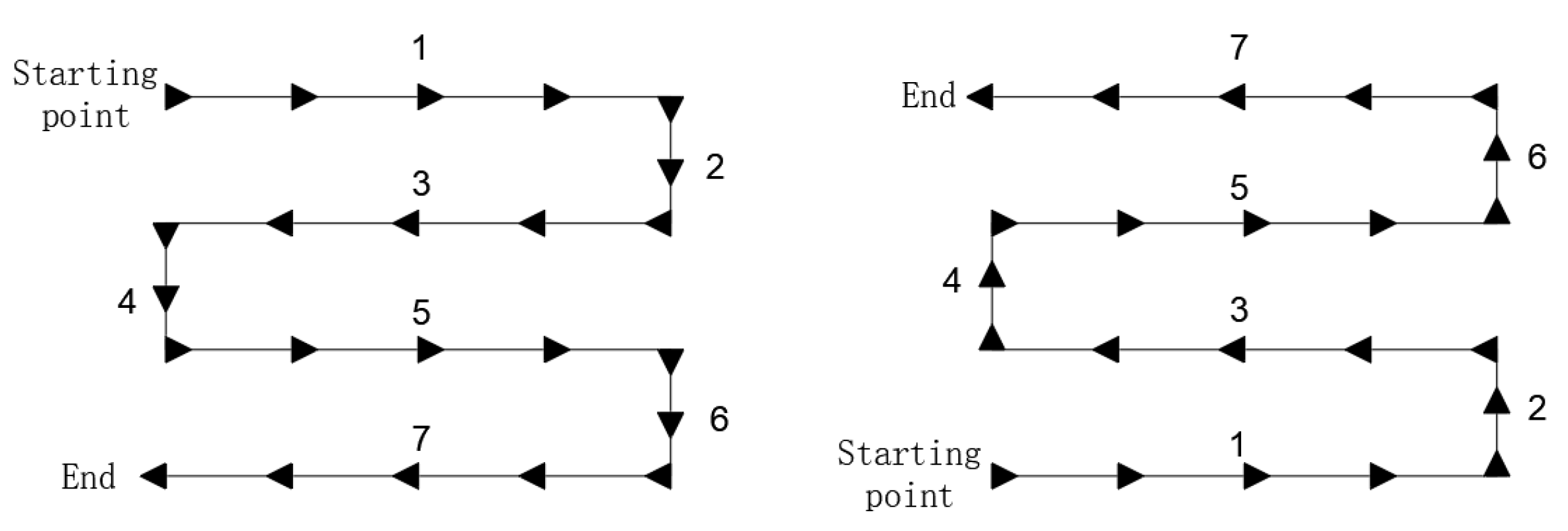
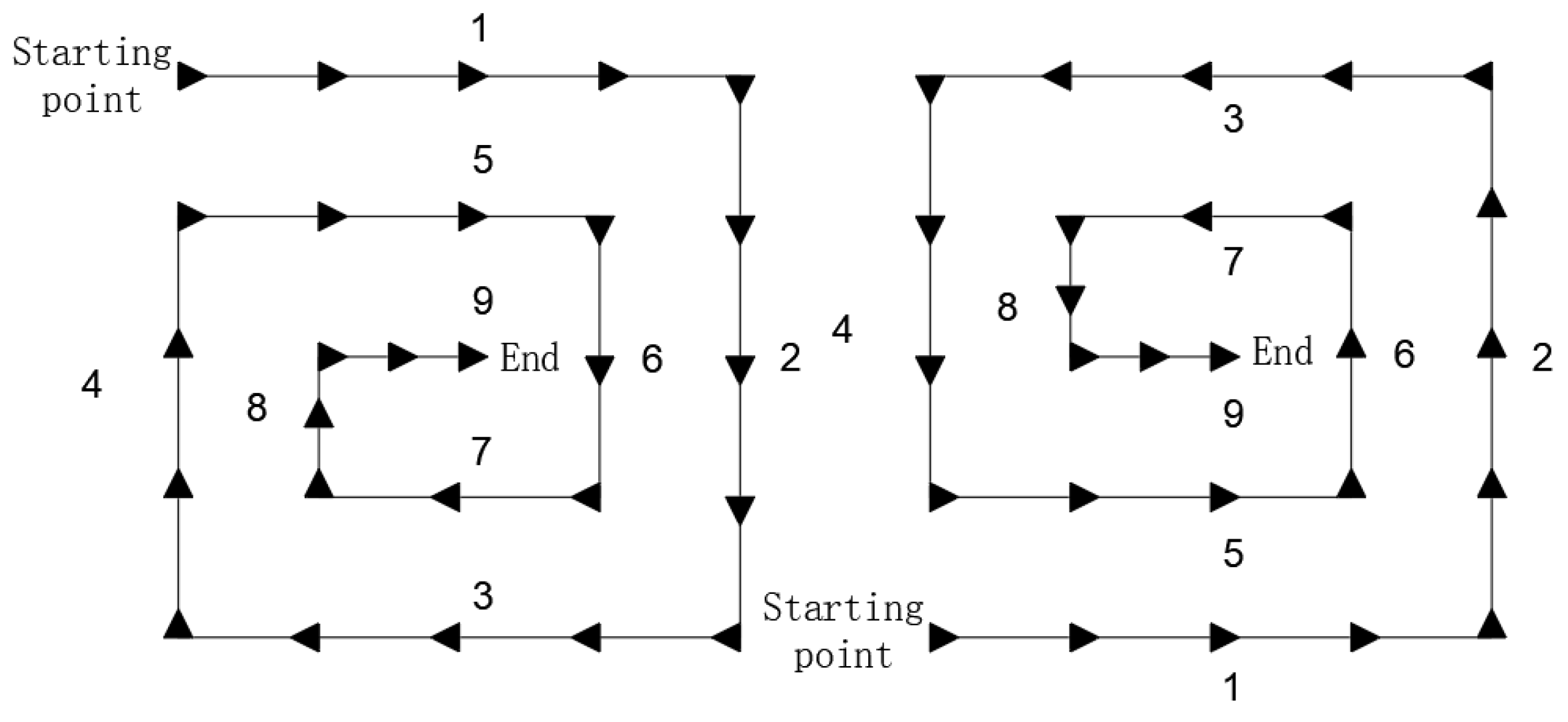
- The cutting head model was established, and the spatial pose equation of the pick was derived and combined with the cutting process path of a rectangular roadway to determine the inflection point position coordinates of the cutting process path of a rectangular roadway. The method of trajectory planning and control is provided for an autonomous cutting control system
- (4)
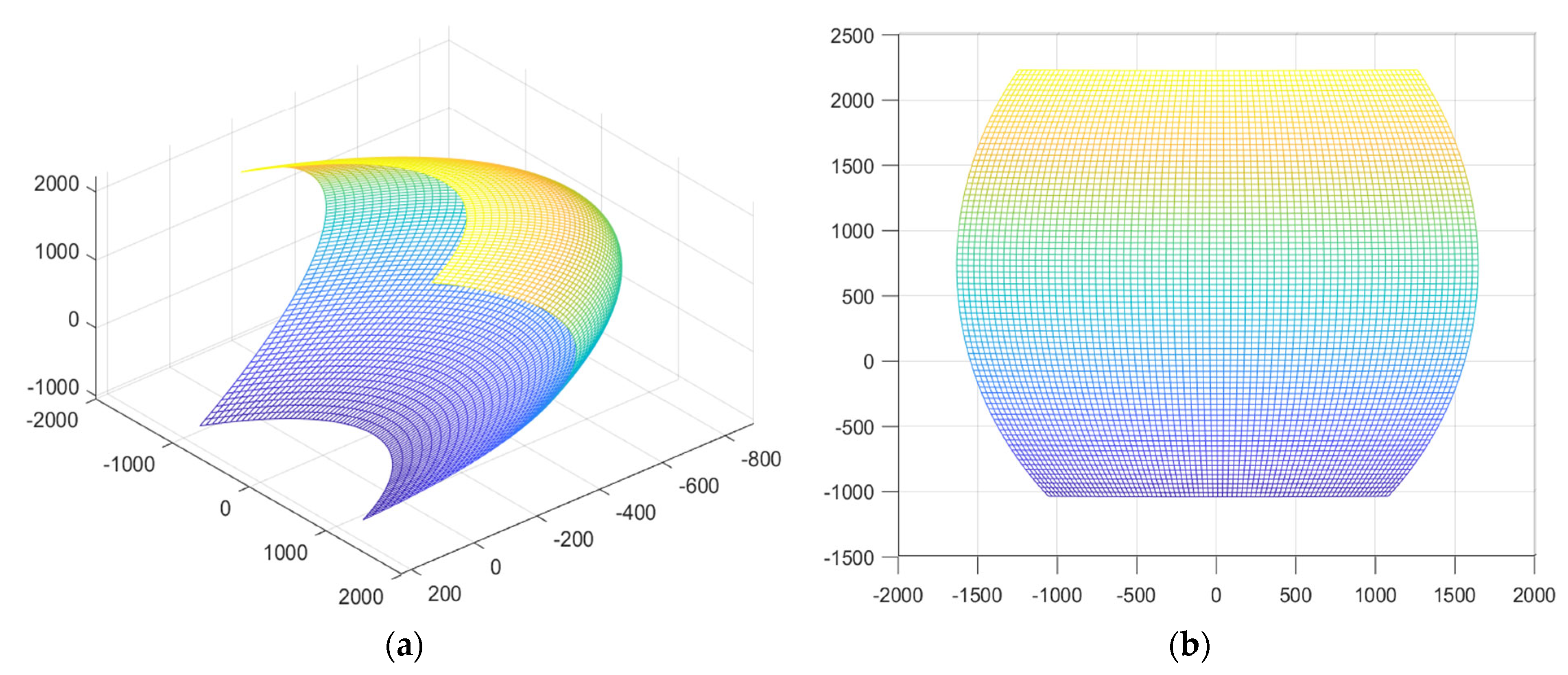
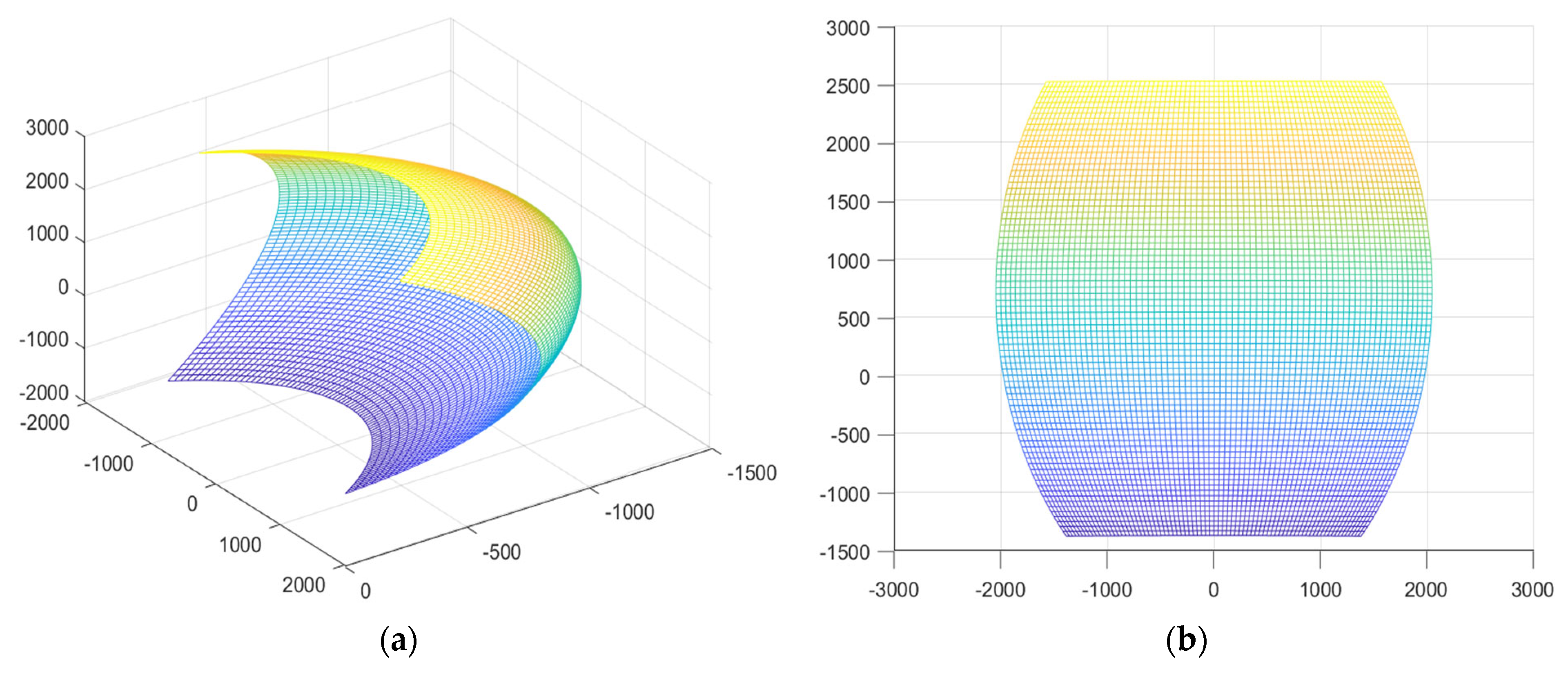
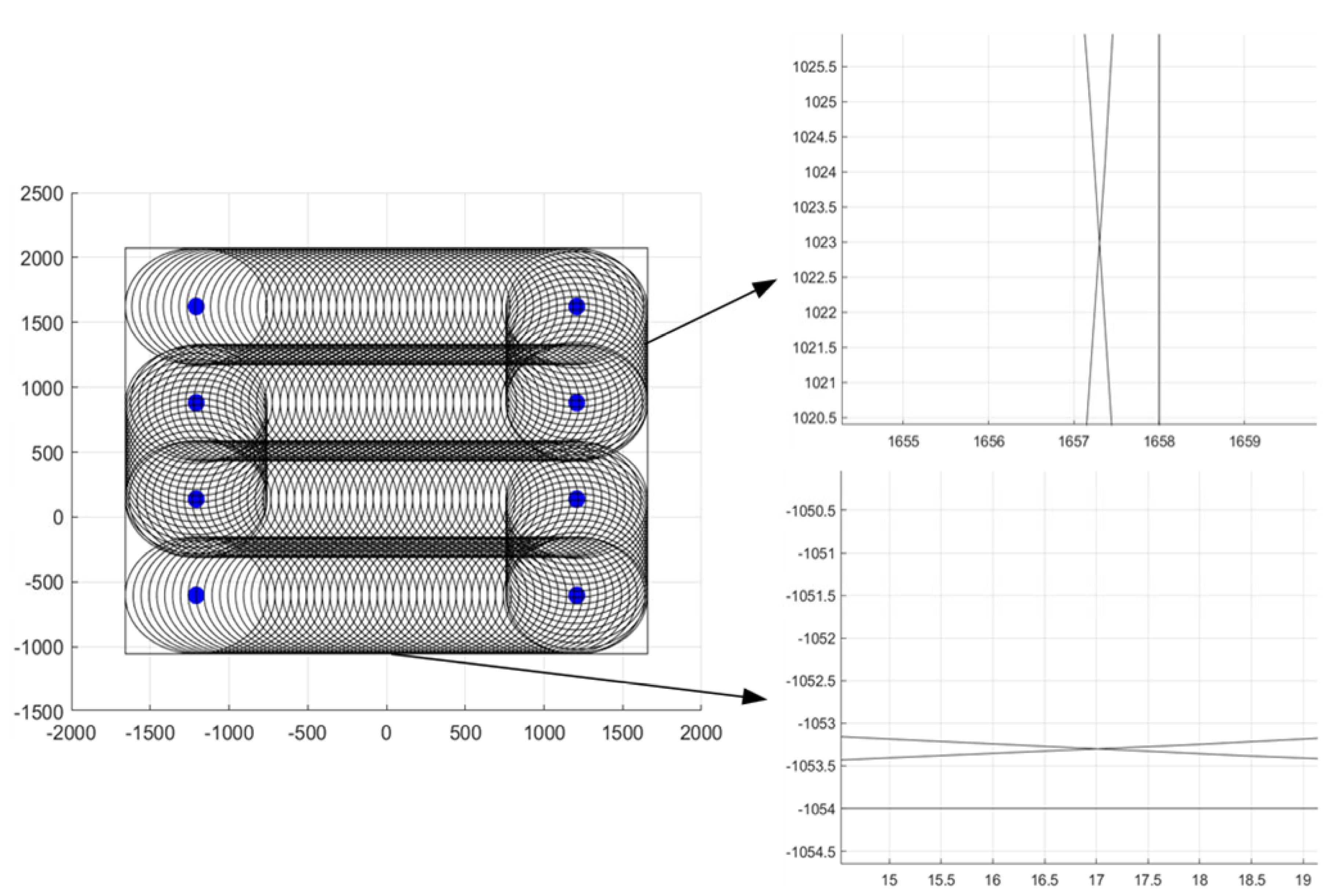
- Taking an EBZ-200 roadheader as an example, MATLAB software was used to simulate the limit cutting area and cutting process path of the cutting head. The simulation results showed that the limit cutting section was a bulging waist shape, the boundary around the roadway was flat, and the roadway cutting error was controlled within 1 mm, which verified the reliability and effectiveness of the autonomous cutting theory of the roadheader. It lays a mathematical model and theoretical foundation for the realization of “autonomous operation of unmanned tunneling equipment”.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Milici, R.C.; Flores, R.M.; Stricker, G.D. Coal resources, reserves and peak coal production in the United States. Int. J. Coal Geol. 2013, 113, 109–115. [Google Scholar] [CrossRef]
- Xie, Z.; Zhang, N.; Qian, D.; Han, C.; An, Y.; Wang, Y. Rapid Excavation and Stability Control of Deep Roadways for an Underground Coal Mine with High Production in Inner Mongolia. Sustainability 2018, 10, 1160. [Google Scholar] [CrossRef]
- Kang, H.P. Sixty years development and prospects of rock bolting technology for underground coal mine roadway in China. J. China Univ. Min. Technol. 2016, 45, 1071–1081. [Google Scholar]
- Ning, S.; Su, H.; Gao, J. Research on Automatic Section Precision Forming of Boom-type Roadheader; Atlantis Press: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Fang, L.; Liu, Z.; Wu, M. Intelligent Optimal Control Considering Dynamic Posture Compensation for a Cantilever Roadheader; Cambridge University Press: Cambridge, UK, 2022; pp. 583–598. [Google Scholar]
- Liu, Z.; Wang, S.; Xie, M.; Xue, C. Analysis of the Outer Contour Characteristics of Roadway Forming under the Influence of Cutting Head Vibration. Shock Vib. 2021, 2021, 6667523. [Google Scholar]
- Jie, T.; Wang, S.; Miao, W. Kinematic models and simulations for trajectory planning in the cutting of Spatially-Arbitrary crosssections by a robotic roadheader. Tunn. Undergr. Space Technol. 2018, 78, 115–123. [Google Scholar]
- Dolipski, M.; Cheluszka, P.; Sobota, P. Investigating the simulated control of the rotational speed of roadheader cutting heads, relating to the reduction of energy consumption during the cutting process. J. Min. Environ. 2015, 51, 298–308. [Google Scholar] [CrossRef]
- Wang, S.B.; Gao, F.; Li, R. Auto-cutting and shaping control system of arbitrary roadway section based on PCC. J. China Coal Soc. 2013, 38, 261–266. [Google Scholar]
- Zhao, X.L.; Du, X.Y.; Qu, X.B.; Li, W.T. Research on automatic deviation correction technology of cantilever roadheader. Coal Min. Mach. 2010, 31, 58–65. [Google Scholar]
- Liu, G.; Mu, D.S.; Duan, S.X.; Song, D.C. Design parameters optimization of cutting head of cantilever roadheader based on genetic algorithm. Appl. Mech. Mater. 2012, 215–216, 193–196. [Google Scholar] [CrossRef]
- Zhai, Y.P. Research on Deviation Compensation Strategy of a New Four DOF Attitude Adjustment Mechanism. Ph.D. Thesis, Tianjin University, Tianjin, China, 2015. [Google Scholar]
- Zhang, M.J.; Cai, X.H.; Lv, F.Y.; Zong, K.; Wu, M. Research on self-correction of grid type roadheader in confined tunnel space. J. Instrum. 2018, 39, 62–70. [Google Scholar]
- Zh, M.J.; Lu, F.Y.; Fu, S.H.; Zong, K.; Wu, M. Study on the pitch angle control of a robotized hydraulic roadheader using different control methods. J. Mech. Sci. Technol. 2018, 32, 4893–4901. [Google Scholar]
- Ding, X.L.; Zhou, L.L.; Zhou, J. Analysis method of space pose deviation of robot. J. Beijing Univ. Aeronaut. Astronaut. 2009, 35, 241–245. [Google Scholar]
- Wang, S.; Gao, F.; Gao, J.; Li, R.; Wu, M. Research on Automatic Cross Section Cutting and Forming Control in Coal Mine Underground Based on Oil Cylinder Stroke Sensor and PCC Electrical Control System; ASME Press: New York, NY, USA, 2011. [Google Scholar]
- Tuncer, A.; Yildirim, M. Dynamic path planning of mobile robots with improved genetic algorithm. Comput. Electr. Eng. 2012, 38, 1564–1572. [Google Scholar] [CrossRef]
- Yu, L.; Dan, H.; Xiao, C.; Zhi, J.; Hao, M. Study on Supporting Equipment Selection for Cantilever Roadheader in Metal Mine. Min. Res. Dev. 2022, 42, 6. [Google Scholar]
- Ning, L.; Zhao, Y. Key Technology and Integration Method Based on LAN of Cantilever Machine Digital Design. Coal Technol. 2016, 35, 234–236. [Google Scholar]
- Mao, J.; Li, J.G.; Li, W.K.; Yong, H.Z. Kinematics analysis and simulation of profiling memory cutting for tunnel robot in complex environment. Procedia Earth Planet. Sci. 2009, 1, 1411–1417. [Google Scholar]
- Tian, J. Research on Boom-Type Roadheader Auto Cutting and Profiling Control System; China University of Mining and Technology: Beijing, China, 2010. [Google Scholar]
- Wang, S. Research on Memory Cutting and Roadway Border Control Method of Boom-Type Roadheader; China University of Mining and Technology: Beijing, China, 2014. [Google Scholar]
- Hu, C.; Zhang, Y.; Yu, R.; Fang, X.; Xu, Z.; Wang, L.; Zhao, B. Research on the Optimization of Cutting Path of Cantilever Roadheader in Large Section Excavation. Sustainability 2022, 14, 5345. [Google Scholar] [CrossRef]
- Dandan, G. Research on Profiling Cutting Theory of Longitudinal Axis Type Roadheader; Liaoning Technical University: Fuxin, China, 2007. [Google Scholar]
- Shi, Z.; Zhong, N. Application of MATLAB in Boom-type Roadheader Auto Profiling Control Research. Coal Min. Mach. 2005, 11, 90–92. [Google Scholar]
- Jia, C.; Zhi, Z.; Hai, D. Matlab Simulation of Cutting Intelligent Control of Cantilever Roadheader. Min. Technol. 2007, 3, 38–39. [Google Scholar]
- Jie, T.; Su-Yu, W.; Jing, M.; Miao, W. Spatial pose kinematics model and simulation of boom-type roadheader. J. China Coal Soc. 2015, 40, 2617–2622. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard D-H Parameter Method | Modified D-H Parameter Method |
|---|---|
| 1. The fixed coordinate system of the connecting rod is different. | |
| Takes the latter joint coordinate system of the connecting rod as the fixed coordinate system. | Takes the previous joint coordinate system of the connecting rod as the fixed coordinate system. |
| 2. The x-axis direction of the connecting rod coordinate system is determined in different ways. | |
| The x-axis direction is determined by the cross-multiplication of the current z-axis and the z-axis of the “previous” coordinate system. | The x-axis direction is determined by the cross-multiplication of the z-axis of the “next” coordinate system and the current z-axis. |
| 3. The transformation rules between connecting rod coordinate systems are different. | |
| The order of parameter changes between adjacent joint coordinate systems is: θ→d→→α | The order of parameter changes between adjacent joint coordinate systems is: α→→θ→d |
| Connecting Rod i | ai−1 | αi−1 | di | θi |
|---|---|---|---|---|
| 1 | a0 | 0° | d1 | θ1 |
| 2 | a1 | 90° | 0 | θ2 |
| 3 | a2 | 90° | d3 + d | 0 |
| 4 | 0 | 0° | d4 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Liang, M.; Fang, X.; Wu, G.; Chen, N.; Song, Y. Research on Autonomous Cutting Method of Cantilever Roadheader. Energies 2022, 15, 6190. https://doi.org/10.3390/en15176190
Xu Z, Liang M, Fang X, Wu G, Chen N, Song Y. Research on Autonomous Cutting Method of Cantilever Roadheader. Energies. 2022; 15(17):6190. https://doi.org/10.3390/en15176190
Chicago/Turabian StyleXu, Ziyue, Minfu Liang, Xinqiu Fang, Gang Wu, Ningning Chen, and Yang Song. 2022. "Research on Autonomous Cutting Method of Cantilever Roadheader" Energies 15, no. 17: 6190. https://doi.org/10.3390/en15176190