
Solar Irradiance Ramp Forecasting Based on All-Sky Imagers

 , ,
, ,  , , , , ,
, , , , ,  and
and
Abstract
:1. Introduction
2. Forecast Algorithms and Ancillary Measurements
2.1. ASI1 and ASI2
2.2. ASI3
2.3. ASI4
2.4. ASI5
2.5. PSPI
3. Methodology
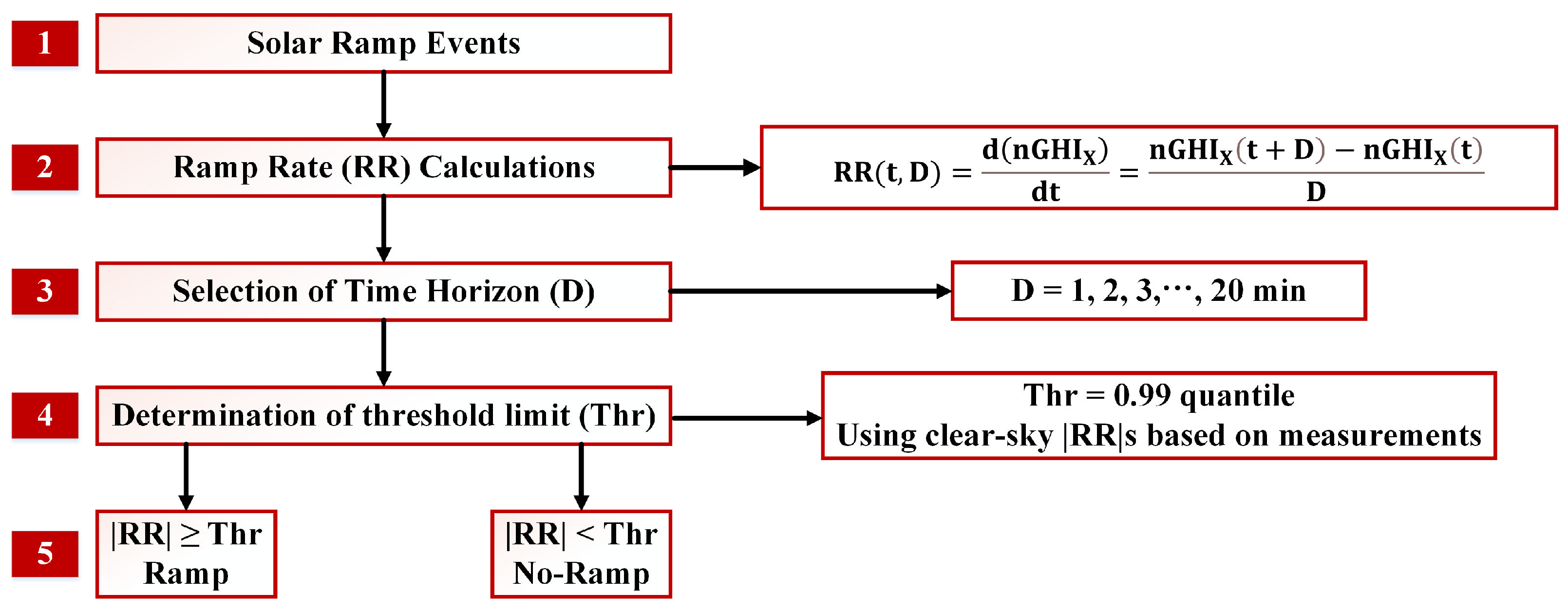
3.1. Characterization of Solar Irradiance Ramp Events
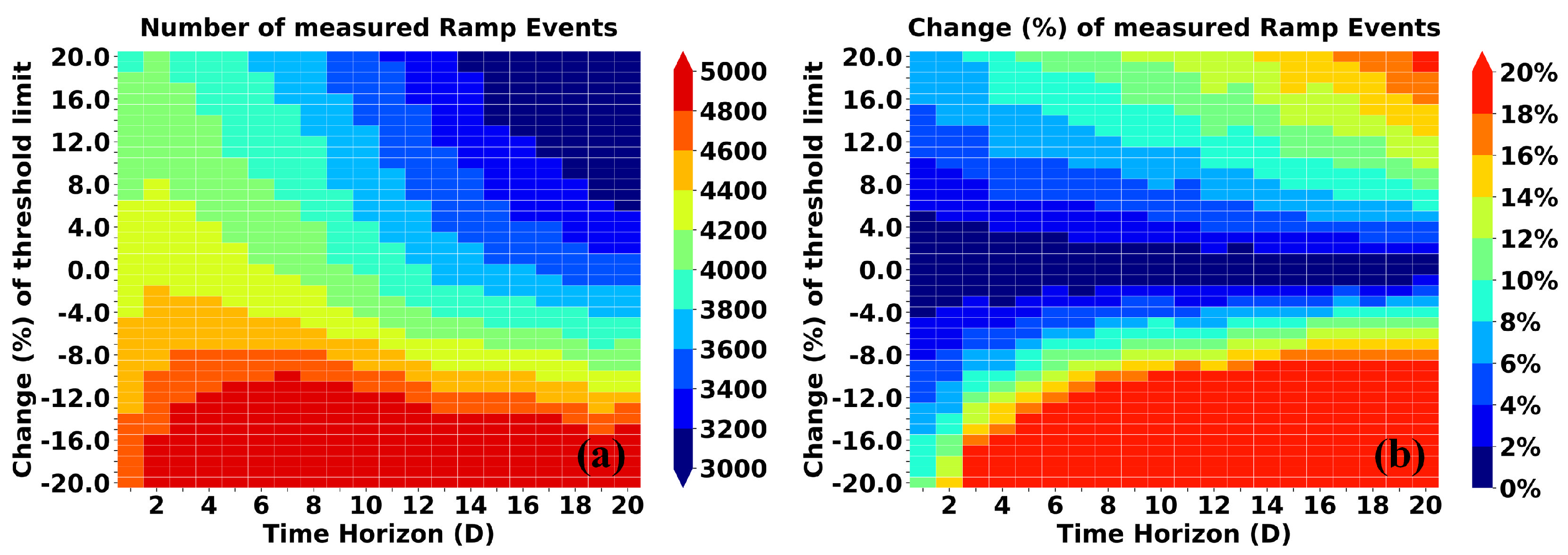
3.2. Sensitivity Analysis of Threshold Limits (Thr)
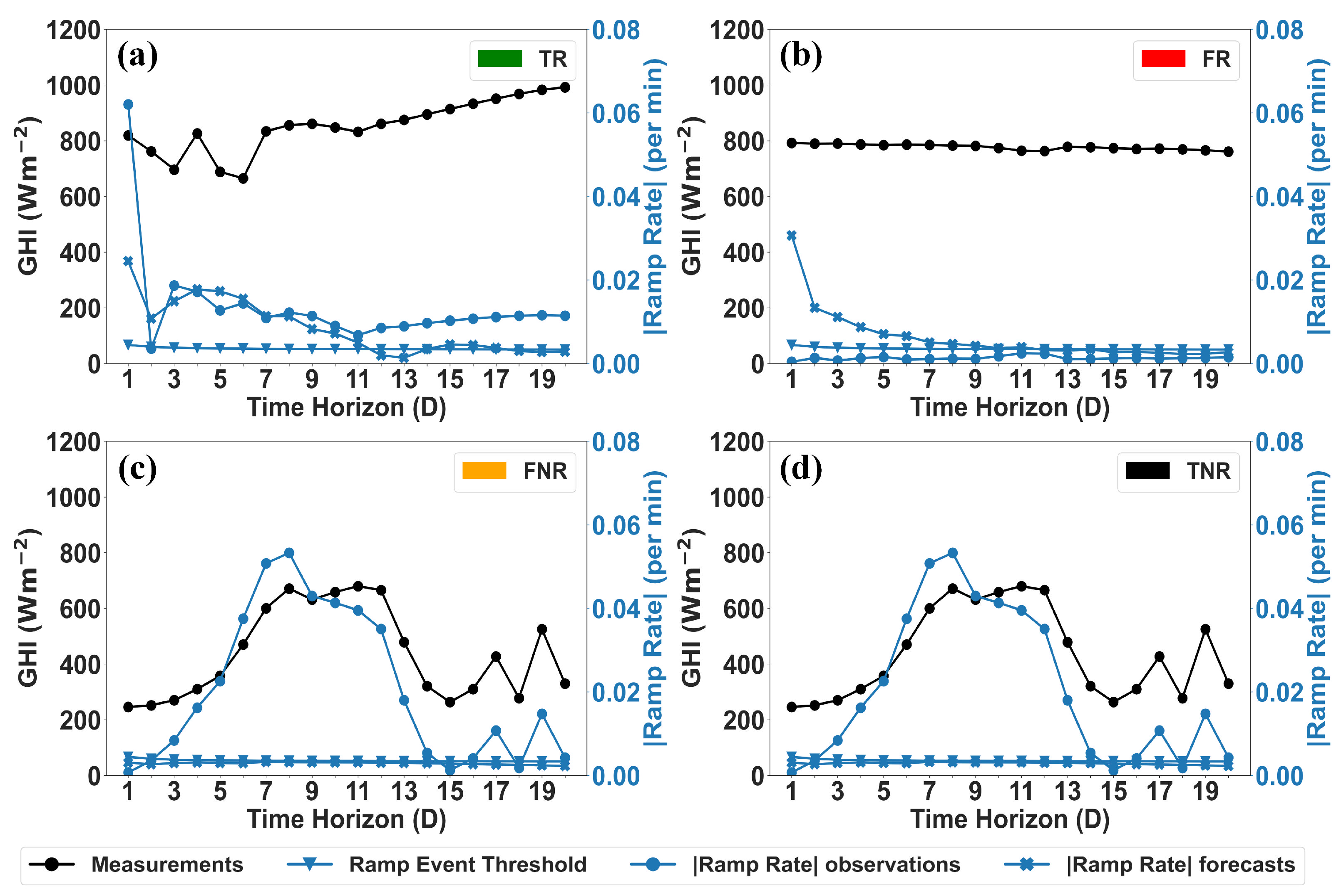
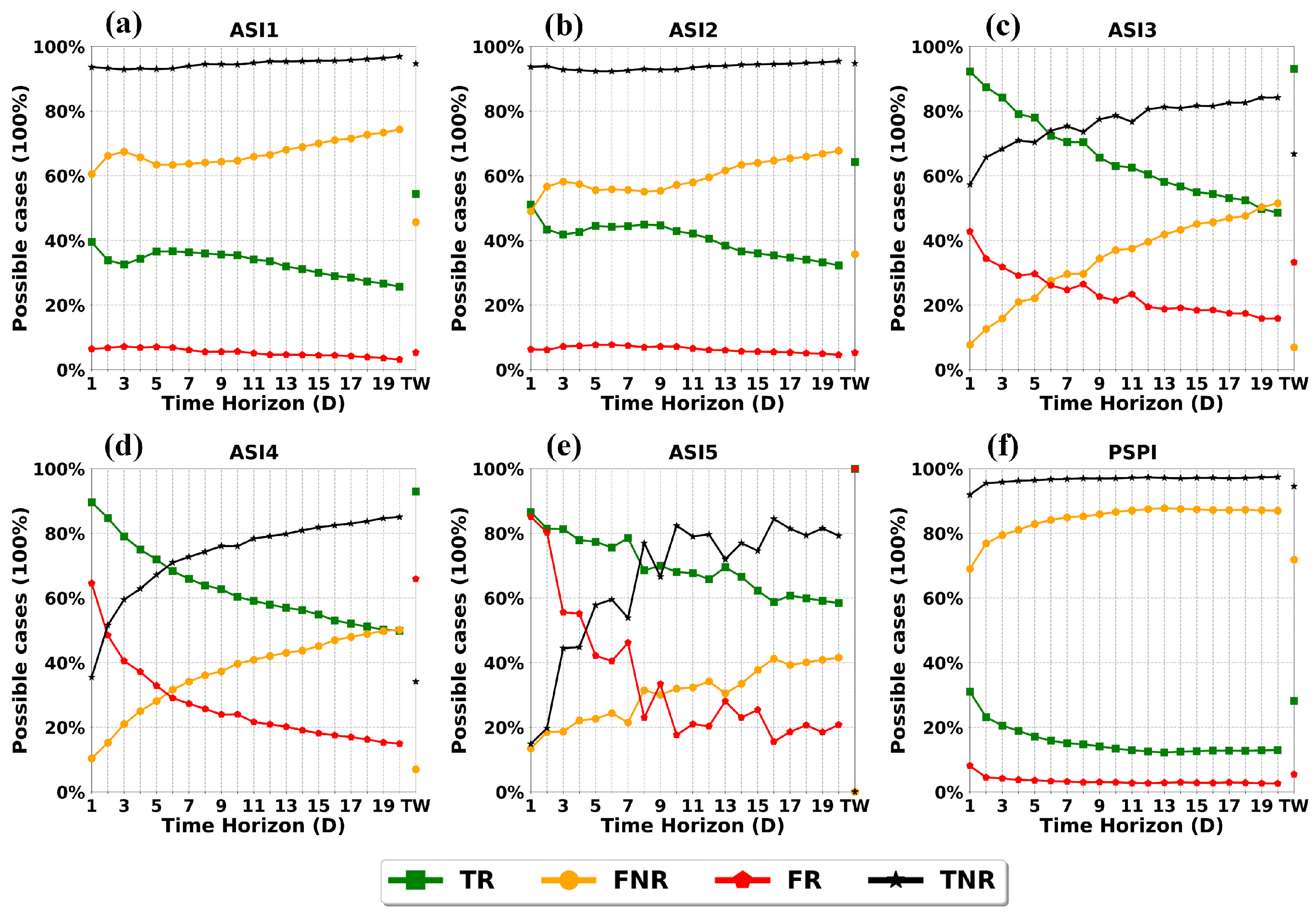
3.3. Possible Cases
3.4. Goodness-of-Fit Statistics of Forecasted Ramp Events
4. Results
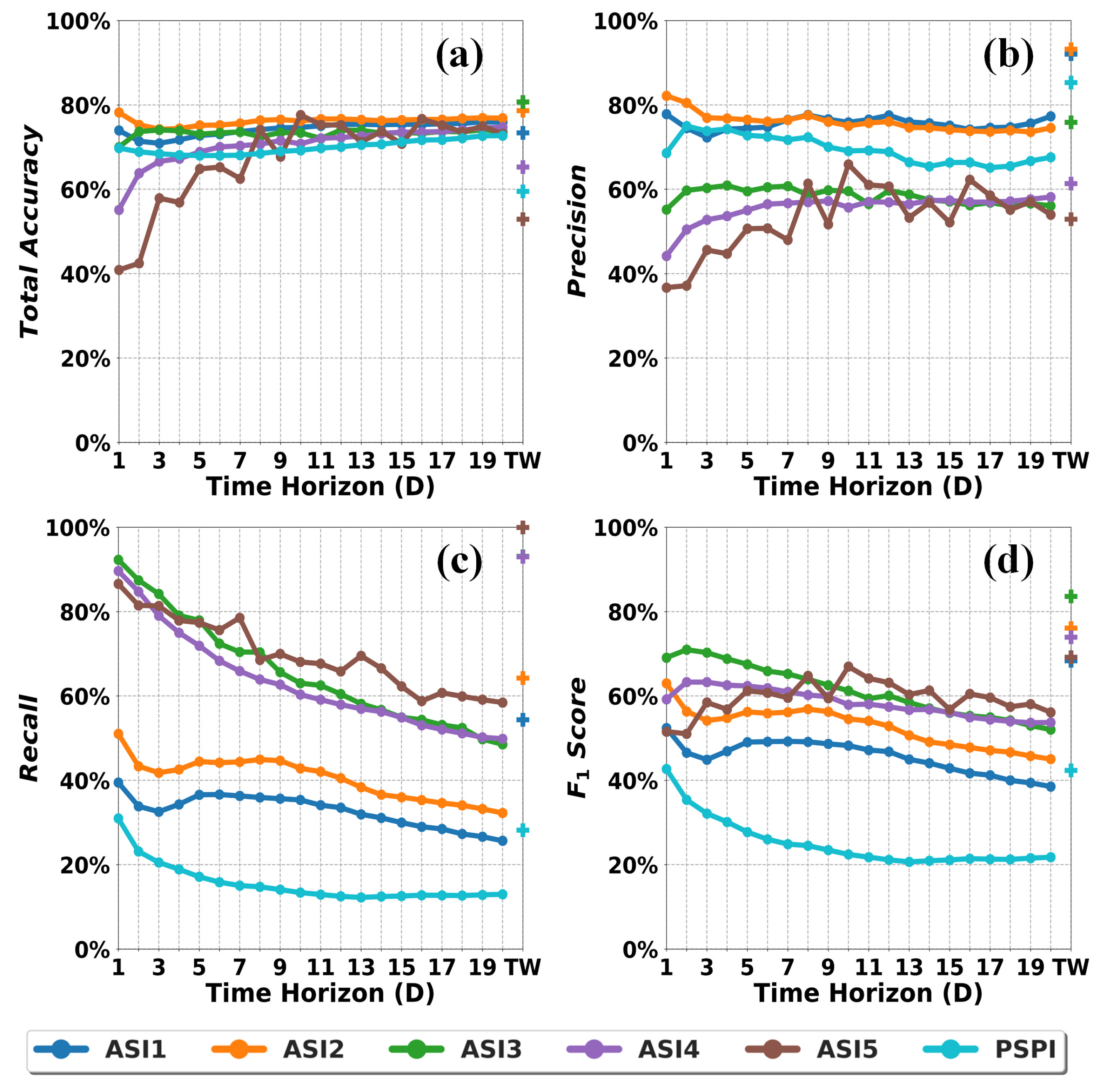
4.1. Overall Ramp Event-Detection Performance
4.2. Ramp Event-Detection Performance under Different Cloud Conditions
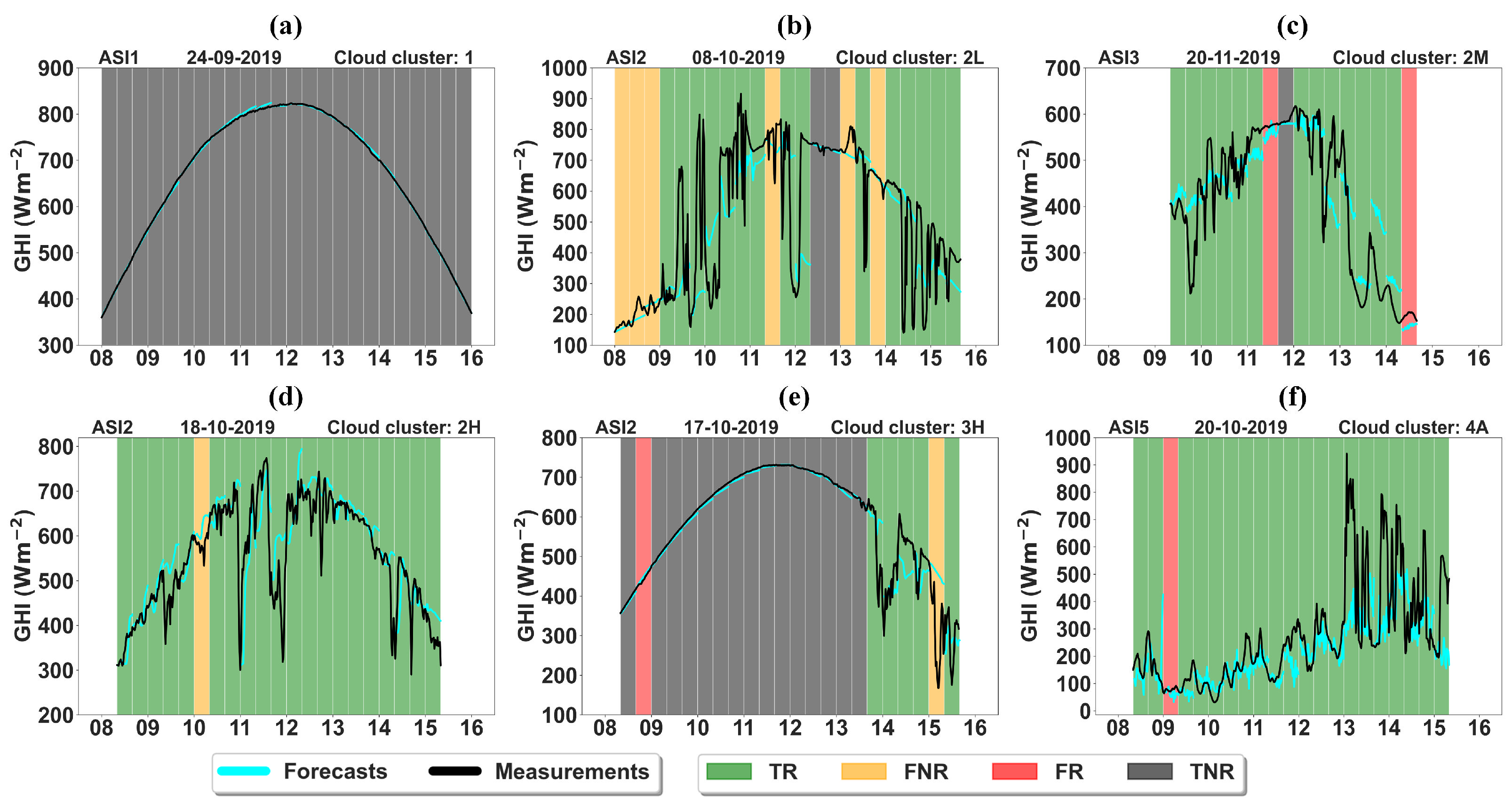
4.3. Intra-Day Variability of Ramp Event Forecasting for Selected Days and ASIs
5. Summary and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ASI | All-sky Imager |
| CBH | Cloud base height |
| CC | Cloud cluster |
| CDF | Cumulative distribution function |
| CMVs | Cloud motion vectors |
| D | Time horizon |
| DHI | Direct horizontal irradiance |
| DNI | Direct normal irradiance |
| FNR | False No-Ramp |
| FR | False Ramp |
| GHI | Global horizontal irradiance |
| IEA PVPS | International Energy Agency’s Photovoltaic Power Systems Program |
| LSTM | Long Short-Term Memory |
| MAD | Mean absolute deviation |
| nGHI | Normalized global horizontal irradiance |
| PSPI | Physics-based Smart Persistence model for Intra-hour forecasting of solar radiation |
| PSA | Plataforma Solar de Almería |
| RE | Ramp Event |
| RMSD | Root mean square deviation |
| RR | Ramp Rate |
| SD | Swinging Door |
| SZA | Solar zenith angle |
| Thr | Threshold limit |
| TNR | True No-Ramp |
| TR | True Ramp |
| TW | 20-minute time window analysis |
References
- Bianco, L.; Djalalova, V.I.; Wilczak, M.J.; Cline, J.; Calvert, S.; Konopleva-Akish, E.; Finley, C.; Freedman, J. A Wind Energy Ramp Tool and Metric for Measuring the Skill of Numerical Weather Prediction Models. Weather. Forecast. 2016, 31, 1137–1156. [Google Scholar] [CrossRef]
- Kamath, C. Understanding wind ramp events through analysis of historical data. In Proceedings of the Transmission and Distribution Conference and Exposition, New Orleans, LA, USA, 19–22 April 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar] [CrossRef]
- Ferreira, C.; Gamma, J.; Matias, L.; Botteud, A.; Wang, J. A Survey on Wind Power Ramp Forecasting; Argonne National Laboratory Rep. ANL/DIS-10-13; Argonne National Lab: Argonne, IL, USA, 2011; p. 28. Available online: http://ceeesa.es.anl.gov/pubs/69166.pdf (accessed on 24 August 2022).
- Cui, M.; Zhang, L.; Feng, C.; Florita, A.R.; Sun, Y.; Hodge, B.M. Characterizing and analyzing ramping events in wind power, solar power, load, and net load. Renew. Energy 2017, 111, 227–244. [Google Scholar] [CrossRef]
- Abuella, M.; Chowdhury, B. Forecasting of solar power ramp events: A post-processing approach. Renew. Energy 2019, 133, 1380–1392. [Google Scholar] [CrossRef]
- Kong, W.; Jia, Y.; Dong, Z.Y.; Meng, K.; Chai, S. Hybrid approaches based on deepwhole-sky-image learning to photovoltaic generation forecasting. Appl. Energy 2020, 280, 115875. [Google Scholar] [CrossRef]
- Florita, A.; Hodge, B.; Orwig, K. Identifying wind and solar ramping events. In Proceedings of the 2013 IEEE Green Technologies Conference (GreenTech), Denver, CO, USA, 4–5 April 2013; pp. 147–152. [Google Scholar] [CrossRef]
- Bristol, E. Swinging door trending: Adaptive trend recording? In Proceedings of the ISA National Conference Proceedings, Sydney, Australia; 1990; Volume 45, pp. 749–753. [Google Scholar]
- Vallance, L.; Charbonnier, B.; Paul, N.; Dubost, S.; Blanc, P. Towards a standardized procedure to assess solar forecast accuracy: A new ramp and time alignment metric. Sol. Energy 2017, 150, 408–422. [Google Scholar] [CrossRef]
- Cui, M.; Zhang, J.; Florita, A.R.; Hodge, B.M.; Ke, D.; Sun, R. An optimized swinging door algorithm for identifying wind ramping events. IEEE Trans. Sustain. Energy 2016, 7, 150–162. [Google Scholar] [CrossRef]
- Abuella, M.; Chowdhury, B. Forecasting Solar Power Ramp Events Using Machine Learning Classification Techniques. In Proceedings of the 2018 IEEE 9th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Charlotte, NC, USA, 25–28 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Reno, M.J.; Stein, J.S. Using Cloud Classification to Model Solar Variability; Sandia National Lab: Albuquerque, NM, USA, 2013. [CrossRef]
- Chu, Y.; Pedro, H.T.C.; Li, M.; Coimbra, C.F.M. Real-time forecasting of solar irradiance ramps with smart image processing. Sol. Energy 2015, 114, 91–104. [Google Scholar] [CrossRef]
- Caldas, M.; Alonso-Suárez, R. Very short-term solar irradiance forecast using all-sky imaging and real-time irradiance measurements. Renew. Energy 2019, 143, 1643–1658. [Google Scholar] [CrossRef]
- Logothetis, S.A.; Salamalikis, V.; Wilbert, S.; Remund, J.; Zarzalejo, F.L.; Xie, Y.; Nouri, B.; Ntavelis, E.; Nou, J.; Hendrikx, N.; et al. Benchmarking of solar irradiance nowcast performance derived from all-sky imagers. Renew. Energy 2022. under review. [Google Scholar]
- Wilbert, S.; Nouri, B.; Prahl, C.; Garcia, G.; Ramirez, L.; Zarzalejo, F.L.; Valenzuela, X.R.; Ferrera, F.; Kozonek, N.; Liria, J. Application of Whole Sky Imagers for Data Selection for Radiometer Calibration. In Proceedings of the EUPVSEC, Munich, Germany, 20–24 June 2016. [Google Scholar]
- Fabel, Y.; Nouri, B.; Wilbert, S.; Blum, N.; Triebel, R.; Hasenbalg, M.; Kuhn, P.; Zarzalejo, L.F.; Pitz-Paal, R. Applying self-supervised learning for semantic cloud segmentation of all-sky images. Atmos. Meas. Tech. 2022, 15, 797–809. [Google Scholar] [CrossRef]
- Nouri, B.; Noureldin, K.; Schlichting, T.; Wilbert, S.; Hirsch, T.; Schroedter-Homscheidt, M.; Kuhn, P.; Kazantzidis, A.; Zarzalejo, L.F.; Blanc, P.; et al. A way to increase parabolic trough plant yield by roughly 2% using all sky imager derived DNI maps. AIP Conf. Proc. 2020, 2303, 110005. [Google Scholar] [CrossRef]
- Nouri, B.; Kuhn, P.; Wilbert, S.; Hanrieder, N.; Prahl, C.; Zarzalejo, L.F.; Kazantzidis, A.; Blanc, P.; Pitz-Paal, R. Cloud height and tracking accuracy of three all sky imager systems for individual clouds. Sol. Energy 2019, 177, 213–228. [Google Scholar] [CrossRef]
- Nouri, B. Solar Irradiance Nowcasting System to Optimize the Yield in Parabolic trough Power Plants. [Solarstrahlungs-Kürzestfrist-Vorhersagesystem für die Ertragsoptimierung eines Parabolrinnenkraftwerks]. Ph.D. Thesis, RWTH Aachen, Aachen, Germany, 2020. [Google Scholar]
- Nouri, B.; Wilbert, S.; Segura, L.; Kuhn, P.; Hanrieder, N.; Kazantzidis, A.; Schmidt, T.; Zarzalejo, L.; Blanc, P.; Pitz-Paal, R. Determination of cloud transmittance for all sky imager based solar nowcasting. Sol. Energy 2019, 181, 251–263. [Google Scholar] [CrossRef]
- Nouri, B.; Blum, N.; Wilbert, S.; Zarzalejo, L.F. A hybrid solar irradiance nowcasting approach: Combining all sky imager systems and persistence irradiance models for increased accuracy. Sol. RRL 2021, 6, 2100442. [Google Scholar] [CrossRef]
- Nou, J.; Chauvin, R.; Thil, S.; Grieu, S. A new approach to the real-time assessment of the clear-sky DNI. Appl. Math. Model. 2016, 40, 7245–7264. [Google Scholar] [CrossRef]
- Chauvin, R.; Nou, J.; Thil, S.; Grieu, S. System for Measuring Components of Solar Radiation. Patent WO2019053232, 21 March 2019. [Google Scholar]
- Hendrikx, N.H.; Visser, L.R.; P.ó, M.; Salah, A.A.; van Sark, W.G.J.H.M. All sky imaging based short-term solar irradiance forecasting with Long Short-Term Memory networks. 2022; in preparation. [Google Scholar]
- Chauvin, R.; Nou, J.; Thil, S.; Traoré, A.; Grieu, S. Cloud Detection Methodology Based on a Sky-imaging System. Energy Procedia 2015, 69, 1970–1980. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Shapiro, L.; Stockman, G. Computer Vision; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Kumler, A.; Xie, Y.; Zhang, Y. A Physics-based Smart Persistence model for Intra-hour forecasting of solar radiation (PSPI) using GHI measurements and a cloud retrieval technique. Sol. Energy 2019, 177, 494–500. [Google Scholar] [CrossRef]
- Lefèvre, M.; Oumbe, A.; Blanc, P.; Espinar, B.; Gschwind, B.; Qu, Z.; Wald, L.; Schroedter-Homscheidt, M.; Hoyer-Klick, C.; Arola, A.; et al. McClear: A new model estimating downwelling solar radiation at ground level in clear-sky conditions. Atmos. Meas. Tech. 2013, 6, 2403–2418. [Google Scholar] [CrossRef]
- Reno, M.J.; Hansen, C.W. Identification of periods of clear sky irradiance intime series of GHI measurements. Renew. Energy 2016, 90, 520–531. [Google Scholar] [CrossRef]
- Chu, Y.; Li, M.; Coimbra, C.F.M.; Feng, D.; Wang, H. Intra-hour irradiance forecasting techniques for solar power integration: A review. iScience 2021, 24, 103136. [Google Scholar] [CrossRef] [PubMed]
- Fabel, Y.; Nouri, B.; Wilbert, S.; Antonio Caballo, J.; Blum, N.; Zarzalejo, L.F.; Ugedo Egido, E.; Pitz-Paal, R. Solar Nowcasting Systems Using AI Techniques. In Proceedings of the 25th Cologne Solar Colloquium, Jülich, Germany, 22 June 2022. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Cloud Types | Dates in 2019 | |||
|---|---|---|---|---|---|
| September | October | November | Total | ||
| 1 | Cloud-free (or almost cloud-free) | 24, 29 | 6, 10, 26, 29 | 8, 18 | 8 |
| 2L | Scattered/broken cloudiness with Low clouds | 8 | 7 | 2 | |
| 2M | Scattered/broken cloudiness with Multiple clouds | 12, 23, 30 | 1, 14, 20, 26 | 7 | |
| 2H | Scattered/broken cloudiness with High/Middle clouds | 1, 7, 18 | 6, 19, 28 | 6 | |
| 3H | Scattered/broken cloudiness with High/Middle clouds | 30 | 5, 17 | 3 | |
| during half of the day, cloud-free during the other half | |||||
| 4A | Overcast cloud conditions during half of the day, | 20 | 21 | 2 | |
| scattered/broken cloudiness during the other half | |||||
| Observed Ramp Events | |||
|---|---|---|---|
| Ramp | No-Ramp | ||
| Ramp Events | Ramp | True Ramp (TR) | False Ramp (FR) |
| Predicted | No-Ramp | False No-Ramp (FNR) | True No-Ramp (TNR) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Logothetis, S.-A.; Salamalikis, V.; Nouri, B.; Remund, J.; Zarzalejo, L.F.; Xie, Y.; Wilbert, S.; Ntavelis, E.; Nou, J.; Hendrikx, N.; et al. Solar Irradiance Ramp Forecasting Based on All-Sky Imagers. Energies 2022, 15, 6191. https://doi.org/10.3390/en15176191
Logothetis S-A, Salamalikis V, Nouri B, Remund J, Zarzalejo LF, Xie Y, Wilbert S, Ntavelis E, Nou J, Hendrikx N, et al. Solar Irradiance Ramp Forecasting Based on All-Sky Imagers. Energies. 2022; 15(17):6191. https://doi.org/10.3390/en15176191
Chicago/Turabian StyleLogothetis, Stavros-Andreas, Vasileios Salamalikis, Bijan Nouri, Jan Remund, Luis F. Zarzalejo, Yu Xie, Stefan Wilbert, Evangelos Ntavelis, Julien Nou, Niels Hendrikx, and et al. 2022. "Solar Irradiance Ramp Forecasting Based on All-Sky Imagers" Energies 15, no. 17: 6191. https://doi.org/10.3390/en15176191
APA StyleLogothetis, S.-A., Salamalikis, V., Nouri, B., Remund, J., Zarzalejo, L. F., Xie, Y., Wilbert, S., Ntavelis, E., Nou, J., Hendrikx, N., Visser, L., Sengupta, M., Pó, M., Chauvin, R., Grieu, S., Blum, N., Sark, W. v., & Kazantzidis, A. (2022). Solar Irradiance Ramp Forecasting Based on All-Sky Imagers. Energies, 15(17), 6191. https://doi.org/10.3390/en15176191