
Impact of Radial Air-Gap Eccentricity on Stator End Winding Vibration Characteristics in DFIG

 ,
,
Abstract
:1. Introduction
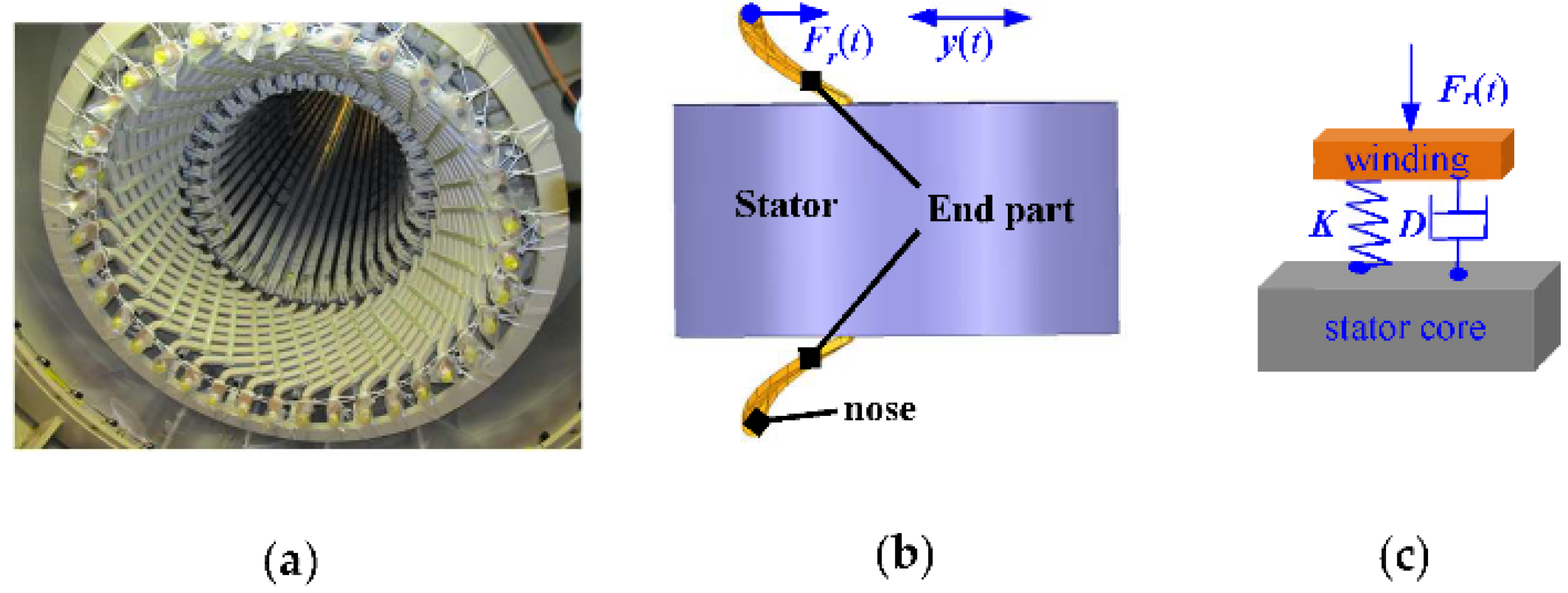
2. Theoretical Analysis
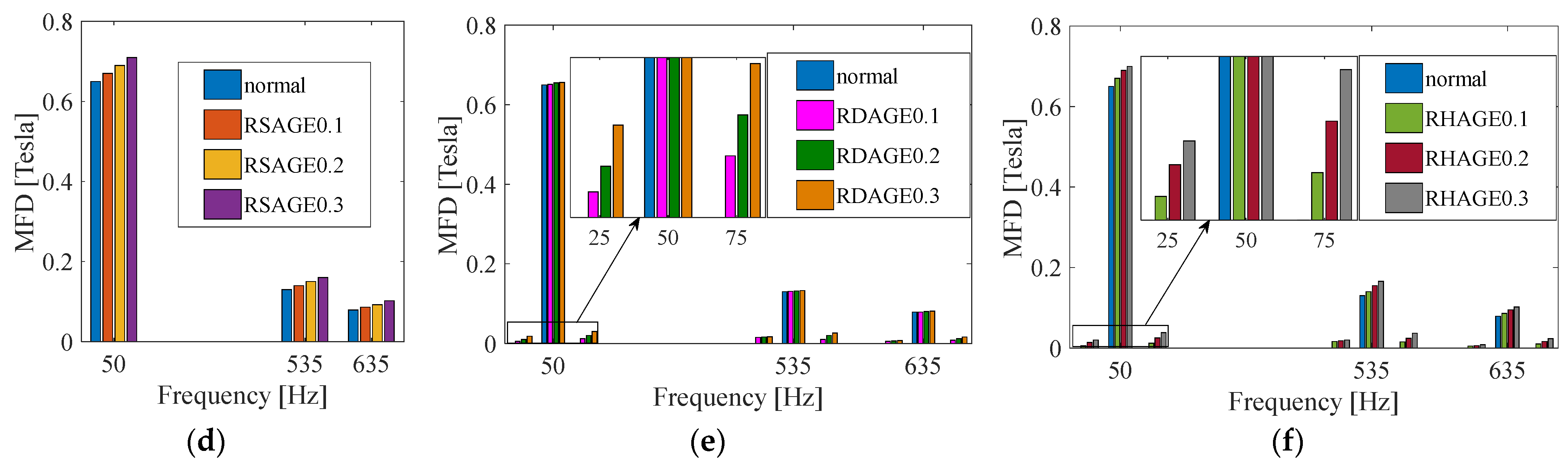
Effect of RAGE on MFD
3. FEA and Experiment Study
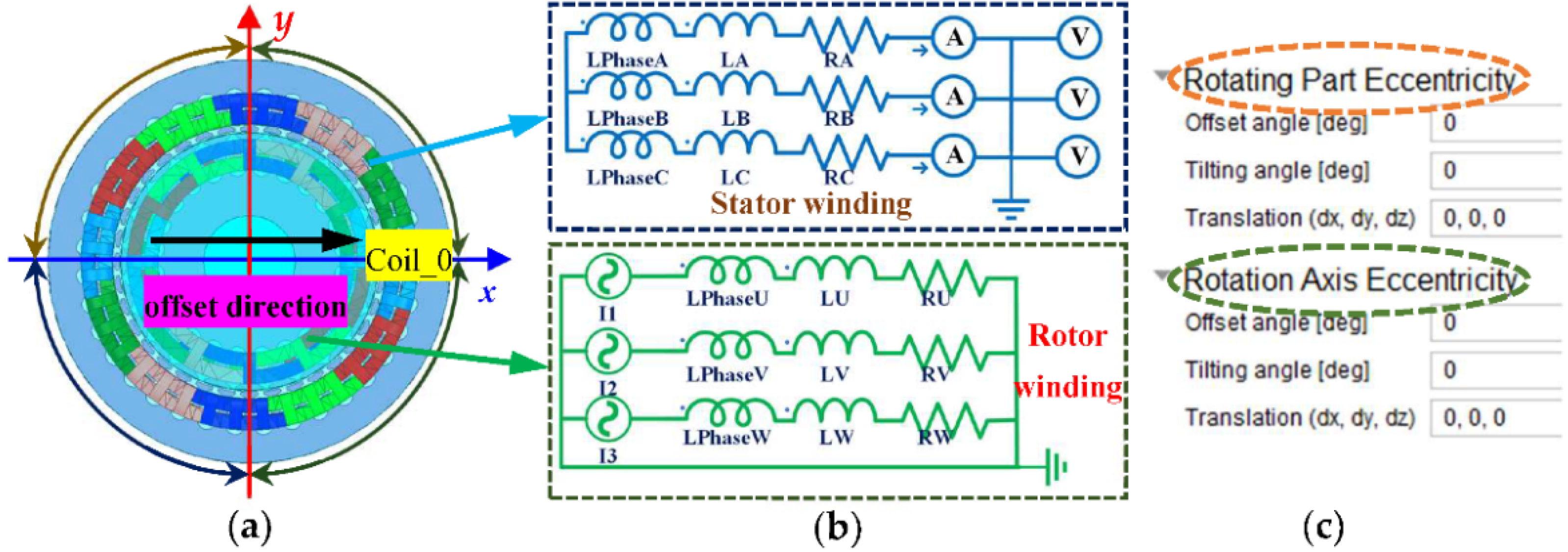
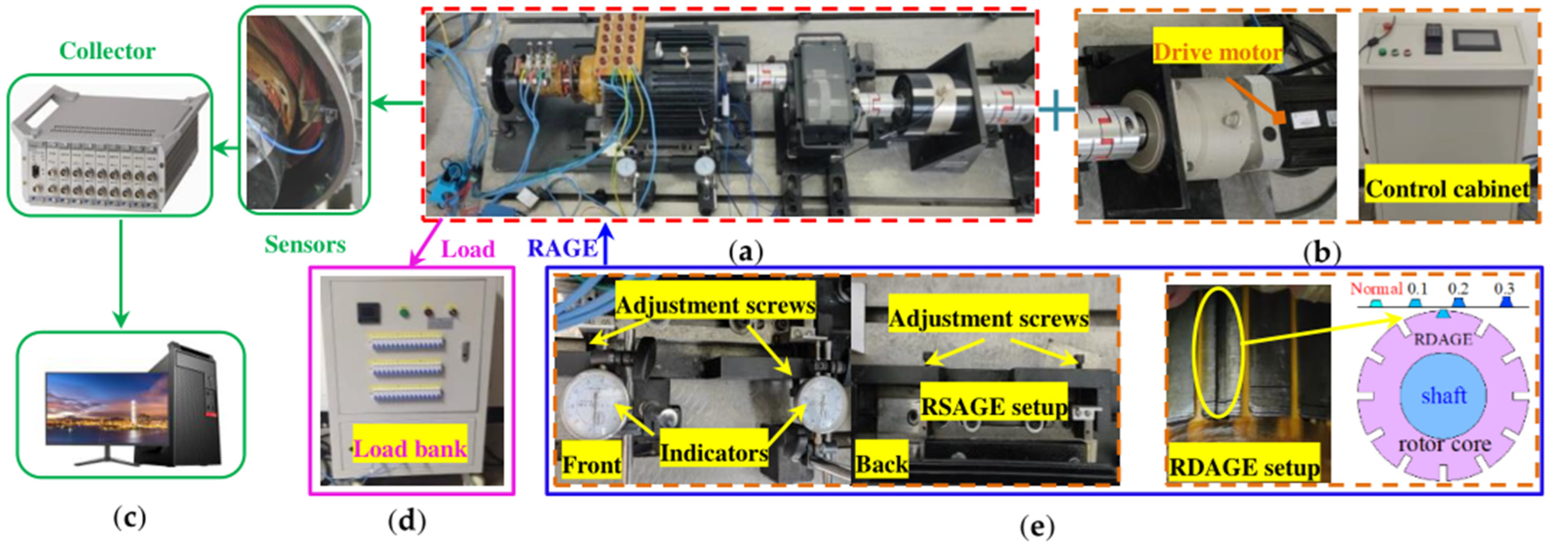
3.1. FEA and Experiment Setup
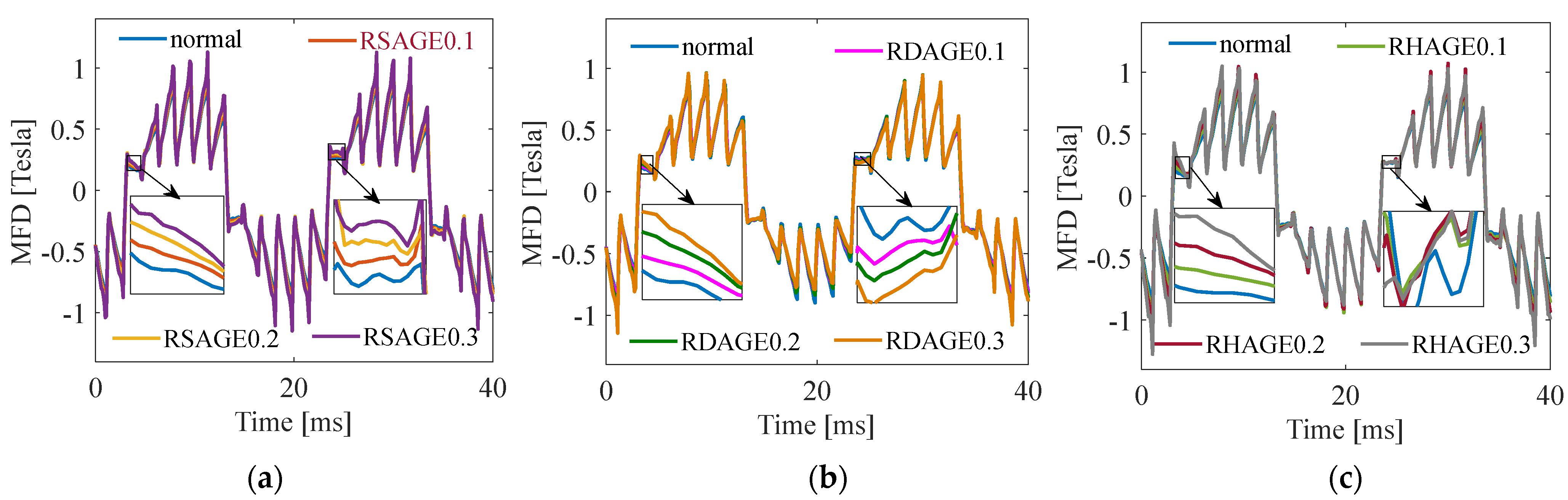
3.2. Results and Discussion
4. Conclusions
- (1)
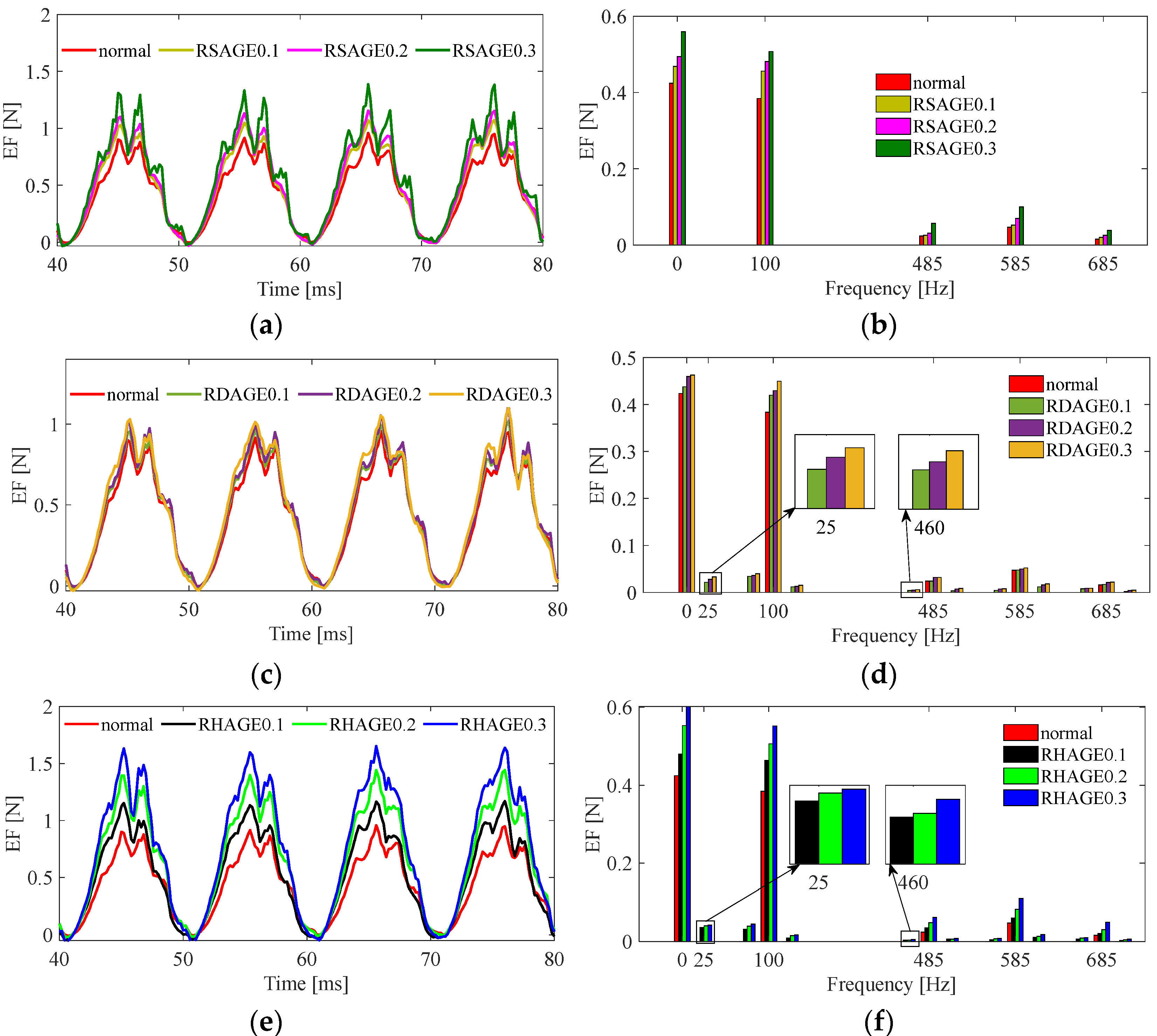
- When the DFIG operates normally, the stator end windings are constantly vibrated by the action of EF. The frequency components of the vibration are fu1 ± fμ2, f1 ± fμ, f1 ± f1, 2f1. The RSAGE fault will increase the vibration amplitude of the stator winding end at the air gap reduction side without affecting the vibration frequency component.
- (2)
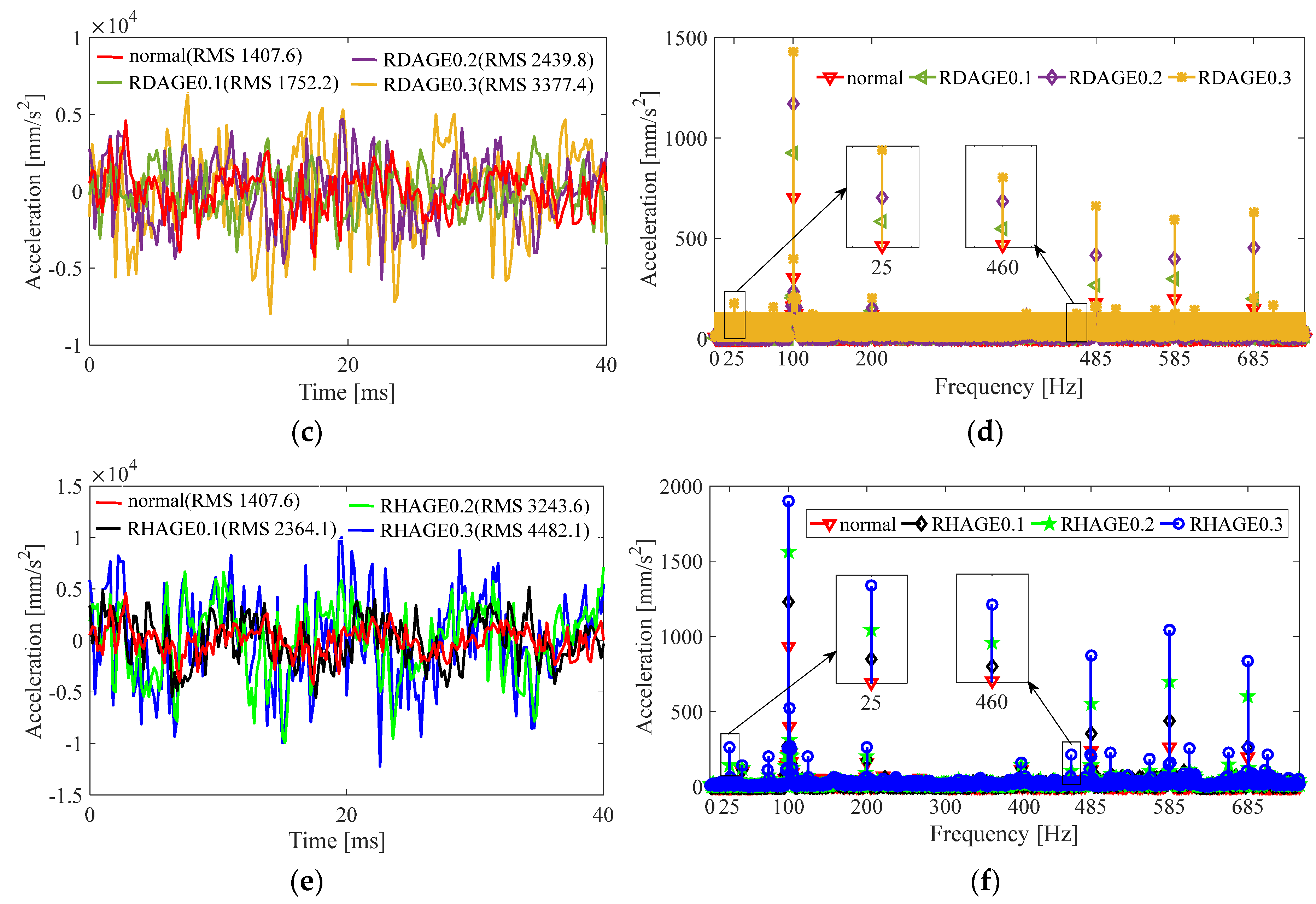
- After the RDAGE fault occurs, the stator end winding EF will generate new frequency components fu1 ± (fu2 ± fr), f1 ± (fu ± fr), and f1 ± (f1 ± fr). The vibration of the same frequency components will also be excited. With the increase in the RDAGE fault degree, the amplitudes of the vibration frequency components will also increase.
- (3)
- RHAGE is the accumulation of RDAGE and RSAGE, and it is consistent with the vibration frequency of the stator end winding under a RDAGE fault. The amplitude of the vibration and each characteristic frequency component will increase with the deepening of the RAGE fault.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Mohammed, A.; Djurović, S. FBG Thermal Sensing Ring Scheme for Stator Winding Condition Monitoring in PMSMs. IEEE Trans. Transp. Electrif. 2019, 5, 1370–1382. [Google Scholar] [CrossRef]
- Li, R.; Li, H.; Hu, B.; Guo, Q. Ground wall insulation damage localization of large generator stator bar using an active Lamb waves method. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 1860–1869. [Google Scholar] [CrossRef]
- Maughan, C. Thermoset stator bar insulation systems. IEEE Electr. Insul. Mag. 2018, 34, 7–16. [Google Scholar] [CrossRef]
- Stone, G.C. Condition monitoring and diagnostics of motor and stator windings—A review. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 2073–2080. [Google Scholar] [CrossRef]
- Zhao, Y.; Yan, B.; Chen, C.; Deng, J.; Zhou, Q. Parametric Study on Dynamic Characteristics of Turbogenerator Stator End Winding. IEEE Trans. Energy Convers. 2014, 29, 129–137. [Google Scholar]
- He, Y.-L.; Xu, M.-X.; Zhang, W.; Wang, X.-L.; Lu, P.; Gerada, C.; Gerada, D. Impact of Stator Interturn Short Circuit Position on End Winding Vibration in Synchronous Generators. IEEE Trans. Energy Convers. 2021, 36, 713–724. [Google Scholar] [CrossRef]
- Letal, J.; Satmoko, B.; Manik, N.; Stone, G. Stator End-Winding Vibration in Two-Pole Machines: Avoiding Generator Failure. IEEE Ind. Appl. Mag. 2020, 26, 29–39. [Google Scholar] [CrossRef]
- Calvert, J.F. Forces in Turbine Generator Stator Windings. Trans. Am. Inst. Electr. Eng. 1931, 50, 178–194. [Google Scholar]
- Tegopoulos, J.A. Forces on the End Winding of Turbine-Generators I—Determination of Flux Densities. IEEE Trans. Power Appar. Syst. 1966, 2, 105–113. [Google Scholar] [CrossRef]
- Tegopoulos, J.A. Forces on the End Winding of Turbine-Generators II—Determination of Forces. IEEE Trans. Power Appar. Syst. 1966, 2, 114–122. [Google Scholar]
- Lin, R.; Laiho, A.N.; Haavisto, A.; Arkkio, A. End-Winding Vibrations Caused by Steady-State Magnetic Forces in an Induction Machine. IEEE Trans. Magn. 2010, 46, 2665–2674. [Google Scholar] [CrossRef]
- Albanese, R.; Calvano, F.; Mut, G.D.; Ferraioli, F.; Formisano, A.; Marignetti, F.; Martone, R.; Romano, A.; Rubinacci, G.; Tamburrino, A.; et al. Coupled Three Dimensional Numerical Calculation of Forces and Stresses on the End Windings of Large Turbo Generators via Integral Formulation. IEEE Trans. Magn. 2012, 48, 875–878. [Google Scholar] [CrossRef]
- Ghaempanah, A.; Faiz, J. Impact of rotor winding and stator stepped end core on magnetic force distribution on stator end-winding of turbogenerators. In Proceedings of the 2015 IEEE Jordan Conference on Applied Electrical Engineering and Computing Technologies (AEECT), Amman, Jordan, 3–5 November 2015; pp. 1–6. [Google Scholar]
- Lin, D.; Zhou, P.; Hu, Y.; Rosu, M. Analytical computation of end-winding leakage inductance for multi-phase AC machines. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–6. [Google Scholar]
- Takeuchi, K.; Matsushita, M.; Makino, H.; Tsuboi, Y.; Amemiya, N. Finite-Element Analysis for Magnetic Flux in End Region of Synchronous Machine Using End-Winding Model. IEEE Trans. Magn. 2021, 57, 1–6. [Google Scholar] [CrossRef]
- Kumar, P.G.S.; Reddy, K.M.; Kumar, K.K. Reinforcement of Generator Stator End Winding Structure by Modal Analysis Approach. In Proceedings of the 2019 IEEE 4th International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), Chennai, India, 21–23 November 2019; pp. 1–5. [Google Scholar]
- Jiang, H.-C.; He, Y.-L.; Tang, G.-J.; Xu, M.-X. A Comprehensive Analysis on Transient Electromagnetic Force Behavior of Stator Windings in Turbo-Generator. Math. Probl. Eng. 2018, 2018, 4189609. [Google Scholar] [CrossRef]
- Tang, G.-J.; Jiang, H.-C.; He, Y.-L.; Meng, Q.-F. Electromagnetic Forces and Mechanical Responses of Stator Windings before and after Rotor Interturn Short Circuit in Synchronous Generators. Math. Probl. Eng. 2020, 2020, 5892312. [Google Scholar] [CrossRef]
- He, Y.-L.; Sun, K.; Wu, Y.; Zhao, H.-S.; Wang, X.-L.; Gerada, C.; Gerada, D. Impact of Static Air-Gap Eccentricity on Thermal Responses of Stator Winding Insulation in Synchronous Generators. IEEE Trans. Ind. Electron. 2022, 69, 13544–13554. [Google Scholar] [CrossRef]
- Dorrell, D.G.; Salah, A.; Guo, Y. The Detection and Suppression of Unbalanced Magnetic Pull in Wound Rotor Induction Motors Using Pole-Specific Search Coils and Auxiliary Windings. IEEE Trans. Ind. Appl. 2017, 53, 2066–2076. [Google Scholar] [CrossRef]
- He, Y.-L.; Xu, M.-X.; Xiong, J.; Sun, Y.-X.; Wang, X.-L.; Gerada, D.; Vakil, G. Effect of 3D Unidirectional and Hybrid SAGE on Electromagnetic Torque Fluctuation Characteristics in Synchronous Generator. IEEE Access 2019, 7, 100813–100823. [Google Scholar] [CrossRef]
- Da, Y.; Shi, X.; Krishnamurthy, M. A New Approach to Fault Diagnostics for Permanent Magnet Synchronous Machines Using Electromagnetic Signature Analysis. IEEE Trans. Power Electron 2013, 28, 4104–4112. [Google Scholar] [CrossRef]
- Attestog, S.; Khang, H.V.; Robbersmyr, K.G. Detecting Eccentricity and Demagnetization Fault of Permanent Magnet Synchronous Generators in Transient State. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- He, Y.-L.; Zhang, Z.-J.; Tao, W.-Q.; Wang, X.-L.; Gerada, D.; Gerada, C.; Gao, P. A New External Search Coil Based Method to Detect Detailed Static Air-Gap Eccentricity Position in Nonsalient Pole Synchronous Generators. IEEE Trans. Ind. Electron. 2021, 68, 7535–7544. [Google Scholar] [CrossRef]
- Faiz, J.; Ebrahimi, B.M.; Akin, B.; Toliyat, H.A. Finite-Element Transient Analysis of Induction Motors Under Mixed Eccentricity Fault. IEEE Trans. Magn. 2008, 44, 66–74. [Google Scholar] [CrossRef]
- Bruzzese, C.; Joksimovic, G.; Santini, E. Static eccentricity detection in synchronous generators by field current and stator Voltage Signature Analysis-Part II: Measurements. In Proceedings of the XIX International Conference on Electrical Machines—ICEM, Rome, Italy, 6–8 September 2010; pp. 1–5. [Google Scholar]
- He, Y.-L.; Wang, Y.; Jiang, H.-C.; Gao, P.; Yuan, X.-H.; Gerada, D.; Liu, X.-Y. A Novel Universal Model Considering SAGE for MFD-Based Faulty Property Analysis Under RISC in Synchronous Generators. IEEE Trans. Ind. Electron. 2022, 69, 7415–7427. [Google Scholar] [CrossRef]
- Shu-ting, W.; Yu-ling, H. Investigation on stator and rotor vibration characteristics of turbo-generator under air gap eccentricity fault. Trans. Can. Soc. Mech. Eng. 2011, 35, 161–176. [Google Scholar]
- Zhang, J.; Xiong, X.; Zhou, Y.; Wang, K. Rotor Eccentric Diagnosis of High-Voltage Motor in Nuclear CRF Pump Using Vibration Signals. In Proceedings of the 2021 7th International Conference on Condition Monitoring of Machinery in Non-Stationary Operations (CMMNO), Guangzhou, China, 11–13 June 2021; pp. 282–286. [Google Scholar]
- Song, Z.; Liu, C.; Zhao, H.; Huang, R. Nonlinear Force and Vibration Analysis of an Interior Permanent Magnet Synchronous Generator with Eccentricity Detection. IEEE/ASME Trans. Mechatron. 2021. [Google Scholar] [CrossRef]
- Zhijun, S.; Dongsheng, Y.; Dianlin, J. Electromagnetic Vibration Characteristics Analysis of Induction Motor in Eccentric State. In Proceedings of the 12th National Conference on Vibration Theory and Applications, Nanning, China, 2 October 2017; pp. 1037–1043. [Google Scholar]
- Dorrell, D.G.; Hermann, A.; Jensen, B.B. Analysis of unbalanced magnetic pull in wound rotor induction machines using finite element analysis—Transient, motoring and generating modes. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 7307–7312. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | MFD | EF |
|---|---|---|
| Normal | fμ, f1 | fu1 ± fμ2, f1 ± fμ, f1 ± f1, 2f1 |
| RSAGE | fμ, f1 | fu1 ± fμ2, f1 ± fμ, f1 ± f1, 2f1 |
| RDAGE | fμ ± fr, fμ, f1 ± fr, f1 | fu1 ± fμ2, f1 ± fμ, f1 ± f1, 2f1, fu1 ± (fu2 ± fr), f1 ± (fu ± fr), f1 ± (f1 ± fr) |
| RHAGE | fμ ± fr, fμ, f1 ± fr, f1 | fu1 ± fμ2, f1 ± fμ, f1 ± f1, 2f1, fu1 ± (fu2 ± fr), f1 ± (fu ± fr), f1 ± (f1 ± fr) |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Rated capacity | 5.5 kW | Rated rotating speed | nr= 1500 rpm |
| Stator core length | l = 155 mm | Stator external diameter | 210 mm |
| Parallel branches | a = 2 | Rotor external diameter | 134 mm |
| Air-gap length | 1 mm | Power factor | cos φ = 0.8 |
| Rated voltage | 380 V | Stator slots | Z1 = 36 |
| Pole pairs | p = 2 | Rotor slots | Z2 = 24 |
| Case | MFD (FEA) | EF (FEA and Experiment) |
|---|---|---|
| Normal | 50, 535, 635 | 0, 100, 485, 585, 685 |
| RSAGE | 50, 535, 635 | 0, 100, 485, 585, 685 |
| RDAGE | 50, 535, 635, 25, 75, 510, 560, 610, 660 | 0, 100, 485, 585, 685 25, 75, 125, 460, 510, 560, 610, 660, 710 |
| RHAGE | 50, 535, 635, 25, 75, 510, 560, 610, 660 | 0, 100, 485, 585, 685 25, 75, 125, 460, 510, 560, 610, 660, 710 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, M.-X.; He, Y.-L.; Zhang, W.; Dai, D.-R.; Liu, X.-A.; Zheng, W.-J.; Wan, S.-T.; Gerada, D.; Shi, S.-Z. Impact of Radial Air-Gap Eccentricity on Stator End Winding Vibration Characteristics in DFIG. Energies 2022, 15, 6426. https://doi.org/10.3390/en15176426
Xu M-X, He Y-L, Zhang W, Dai D-R, Liu X-A, Zheng W-J, Wan S-T, Gerada D, Shi S-Z. Impact of Radial Air-Gap Eccentricity on Stator End Winding Vibration Characteristics in DFIG. Energies. 2022; 15(17):6426. https://doi.org/10.3390/en15176426
Chicago/Turabian StyleXu, Ming-Xing, Yu-Ling He, Wen Zhang, De-Rui Dai, Xiang-Ao Liu, Wen-Jie Zheng, Shu-Ting Wan, David Gerada, and Shan-Zhe Shi. 2022. "Impact of Radial Air-Gap Eccentricity on Stator End Winding Vibration Characteristics in DFIG" Energies 15, no. 17: 6426. https://doi.org/10.3390/en15176426