
Prioritization of Passive Parameters from Modified Averaging Approach-Based Computation (MAAC) Methodology for Ascertaining Formation of Single and Multi-Location Unintentional Islands

 ,
, 
Abstract
:1. Introduction
- (i)
- As the power distribution network size increases (for higher bus networks) and DG penetration increases, the number of islanding and non-islanding cases also increases, which requires a large number of comparisons for determining the parameter’s performance evaluation, thus demanding more computation.
- (ii)
- The threshold values (i.e., averaged islanding values [41]) for the passive parameters change from one network to the other, i.e., they are dependent on the size of the network (number of buses) and the DG penetration level.
- (iii)
- A set of best parameters [41] is obtained only for the low power mismatch range, but this scheme has not provided the overall best parameters by using the repetition approach for all low, medium, and high power mismatch ranges as a complete solution.
- (i)
- A modified averaging approach-based computation (MAAC) scheme is proposed which computes the average of the parameter’s instantaneous islanding and non-islanding values and thus reduces a large number of instantaneous islanding and non-islanding values to a single value. Hence, only the single averaged islanding and single averaged non-islanding values of a parameter are sufficient for comparison with the corresponding parameter’s threshold value. Thus, the number of comparisons (for the parameter’s performance value evaluation) decreases, thereby reducing the computational burden.
- (ii)
- For all the ‘64’ parameters, threshold values are derived directly from voltage and frequency limits as per IEEE 1547-2018 [6] (i.e., the revised version of IEEE 1547-2003 std. [5]), UL1741, and IEEE 929-2000 grid interconnection standards [7,10]. Three different power distribution networks, i.e., std. IEEE 13, 34, and 37 bus systems with different DG penetration levels, were considered for analysis. The threshold values obtained are the same (for the same DG source specifications) for these three distribution networks. These values are independent of the size (i.e., no. of buses), network topology, grid source voltage, and the DG penetration levels, respectively, thus providing a generalized threshold setting for passive parameters.
- (iii)
- Generalized expressions are proposed for the repetition factor (unlike in [41]) which determines the most effective passive parameters for the three distribution test feeders (DTFs), i.e., IEEE 13, 34, and 37 bus networks, from a large set of effective parameters for different ranges of power mismatch between a load at the PCC and DG power generation.
- (iv)
- Effective passive parameter(s), especially for complex real-time situations [35,36,37,38], that is, for the detection of unplanned island formations at multiple locations due to both PV inverter and rotating type DGs, respectively, are obtained by performance testing of various parameters for a large number of switching events.
2. Passive Parameters and Types of Distributed Generation Sources
3. Distribution Test Feeders
3.1. Distributed Generation Grid Integration Levels
3.2. Significance of Three Distribution Test Feeders
4. Islanding and Non-Islanding Switching Events
4.1. Islanding Switching Events
- (i)
- Active and reactive LPM ranges were obtained by varying the local loading values at PCC points from 80 kW to 140 kW for inverter DGs, 75 kW to 135 kW for rotating DGs, and100 kVAr to 160 kVAr for both inverter and rotating DGs in steps of 10 kW and 10 kVAr, respectively.
- (ii)
- Active and reactive MPM ranges are obtained by varying local loading values at PCC points from 150 kW to 210 kW for inverter DGs, 145 kW to 205 kW for rotating DGs, and 170 kVAr to 230 kVAr for both inverter and rotating DGs in steps of 10 kW and 10 kVAr, respectively.
- (iii)
- Active and reactive HPM ranges are obtained by varying local loading values at PCC points from 220 kW to 280 kW for inverter DGs, 215 kW to 275 kW for rotating D, Gs, and 240 kVAr to 300 kVAr for both inverter and rotating DGs in steps of 10 kW and 10 kVAr, respectively.
4.2. Non-Islanding Switching Events
5. Modified Averaging Approach-Based Computation (MAAC) Methodology
5.1. Conceptualization
5.2. Step-by-Step Procedure of Computation of Averaged Islanding and Non-Islanding Values
6. Threshold Setting and Prioritization Scheme for Passive Parameters
6.1. Threshold Setting for All Passive Parameters
6.2. Prioritization of Passive Parameters
7. Data Extracted, Simulation Results, and Effective Passive Parameters
7.1. Data Extracted for Obtaining Effective Passive Parameters
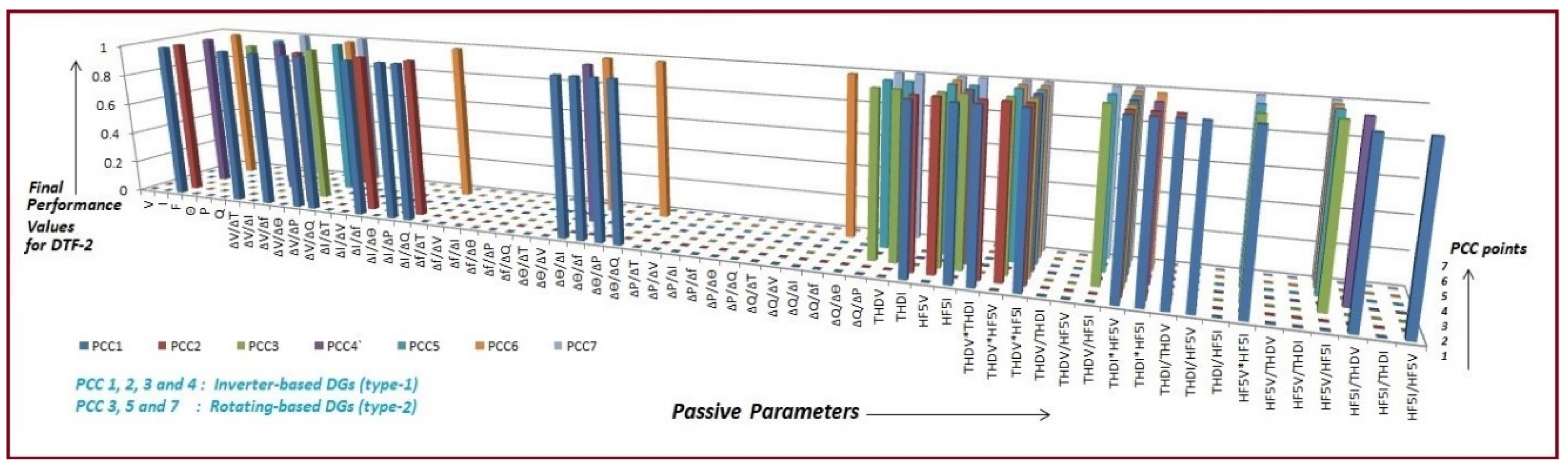
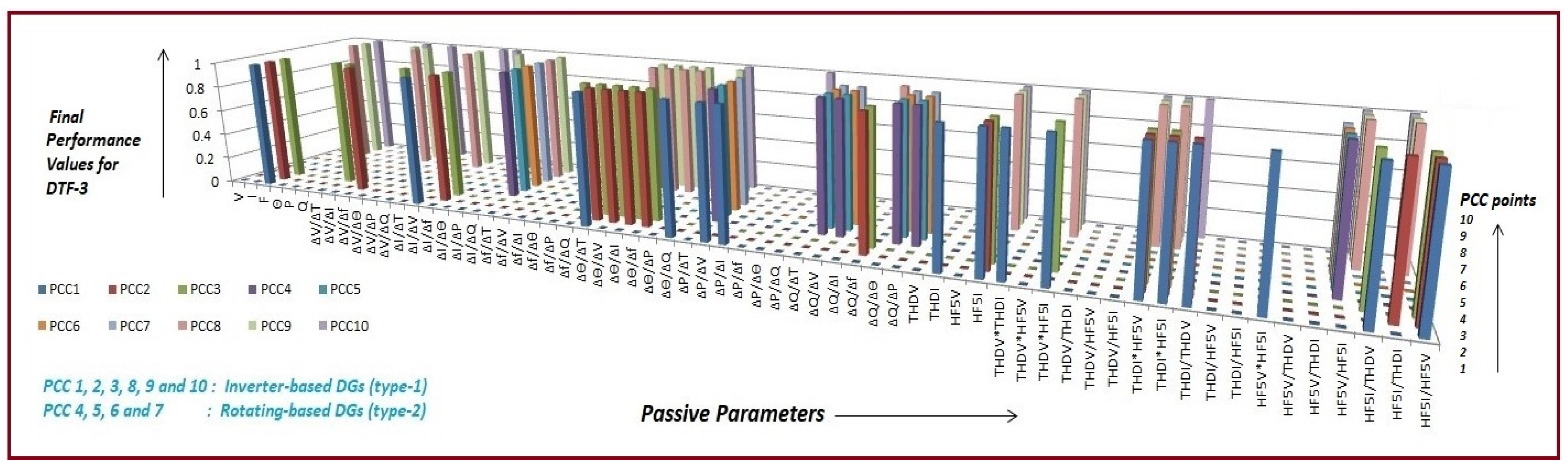
7.2. Simulation Results
8. Repetition Factor, Non-Detection Zone of Effective Parameters, and Computational Burden of the Proposed MAAC-Based Prioritization Methodology
8.1. Repetition Factor
8.2. Data Size, Computational Burden of Proposed MAAC Methodology, and Comparison with Other Performance Ranking Schemes
8.3. Comparison of MAAC Methodology with Other Computational Methods
9. Discussion on Outcomes
- (i)
- The proposed MAAC methodology reduces the data size of the islanding, non-islanding, and threshold values by 99.95%, 99.91%, and 99.95%, respectively, for DTF-1, 99.99%, 99.94%, and 99.99%, respectively, for DTF-2, and 99.99%, 99.95%, and 99.99%, respectively, for DTF-3. This methodology reduces the computational burden, i.e., the number of comparisons to ‘1′ each for the large number of islanding and non-islanding cases.
- (ii)
- The threshold values of all parameters are obtained from DG grid-interconnection standards, i.e., IEEE1547-2018, UL1741, and IEEE 929-2000 (from these standards voltage and frequency limits are considered to obtain threshold values of all 64 parameters), thus completely solving the most important limitation of passive approach-based islanding detection methods that is, threshold setting. The advantage is that the threshold values obtained are the same for the three DTFs and, hence, independent of the type of distribution network.
- (iii)
- Since a large number of effective passive parameters were obtained through the proposed prioritization methodology, a repetition factor was introduced to provide a small set of parameters. Therefore, repetition factors ‘RF2’ and ‘RF3’ provide a reduced set of these effective parameters referred to as the ‘most’ and ‘overall most’ effective parameters, respectively. The best obtained among all ‘64’ parameters is ‘THDI*HF5V’.
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| PCC | Point of common coupling |
| DG | Distributed generation |
| MAAC | Modified Averaging Approach-based Computation |
| DTF | Distribution test feeder |
| V | PCC voltage |
| I | Current at PCC |
| f | Frequency at PCC |
| θ | Phase angle between V and I |
| P | Active power at PCC |
| Q | Reactive power at PCC |
| THD | Total harmonic distortion |
| THDV | THD of PCC voltage |
| THDI | THD of PCC current |
| HF5 | 5th harmonic factor |
| HF5V | HF5 of PCC voltage |
| HF5I | HF5 of PCC current |
| ISW | Islanding switching event |
| GIL | Grid integration level |
| Vmin | PCC voltage minimum limit as per DG grid interconnection standards |
| Vmax | PCC voltage maximum limit as per DG grid interconnection standards |
| fmin | PCC frequency minimum limit as per DG grid interconnection standards |
| fmax | PCC frequency maximum limit as per DG grid interconnection standards |
| Vth | Threshold setting derived for PCC voltage |
| Ith | Threshold setting derived for PCC current |
| fth | Threshold setting derived for PCC frequency |
| θth | Threshold setting derived for phase angle |
| Pth | Threshold setting derived for active power at PCC |
| Qth | Threshold setting derived for reactive power at PCC |
| THDVth | Threshold setting of THDV as per DG grid interconnection standards |
| THDIth | Threshold setting of THDI as per DG grid interconnection standards |
| HF5Vth | Threshold setting of HF5V as per DG grid interconnection standards |
| HF5Ith | Threshold setting of HF5I as per DG grid interconnection standards |
References
- Karimi, M.; Mokhlis, H.; Naidu, K.; Uddin, S.; Bakar, A.H.A. Photovoltaic penetration issues and impacts in distribution network—A review. Renew. Sustain. Energy Rev. 2016, 53, 594–605. [Google Scholar] [CrossRef]
- Venkatramanan, D.; Singh, M.K.; Ajala, O.; Domimguez-Garcia, A.; Dhople, S. Integrated system models for networks with generators and inverters. In Proceedings of the 11th Bulk Power Systems Dynamics and Control Symposium (IREP 2022), Banff, AB, Canada, 25–30 July 2022. [Google Scholar] [CrossRef]
- Venkatramanan, D.; John, V. Integrated high order pulse width modulation filter-transformer structure for single phase static compensator. IET Power Electron. 2013, 6, 67–77. [Google Scholar] [CrossRef]
- Bower, W.; Ropp, M. Evaluation of Islanding Detection Methods for Photovoltaic Utility-Interactive Systems; Report IEA PVPS Task V., DOE Contract Number: AC04-94AL85000; Sandia National Lab.: Albuquerque, NM, USA, 2002. [CrossRef]
- IEEE Std 1547-2003; IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems. IEEE: Piscataway, NJ, USA, 2003; pp. 1–28. [CrossRef]
- IEEE Std 1547-2018 (Revision of IEEE Std 1547-2003); IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces. IEEE: Piscataway, NJ, USA, 2018; pp. 1–138. [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar] [CrossRef]
- Kim, M.; Haider, R.; Cho, G.; Kim, C.; Won, C.; Chai, J. Comprehensive review of islanding detection methods for distributed generation systems. Energies 2019, 12, 1–21. [Google Scholar] [CrossRef]
- Kulkarni, N.K.; Khedkar, M.K. Methods to Detect the Occurrence of an Unintentional Island with Passive Approach: A Review. J. Inst. Eng. India Ser. B 2021, 102, 1091–1111. [Google Scholar] [CrossRef]
- Dutta, S.; Sadhu, P.K.; Reddy, M.J.; Mohanta, D.K. Shifting of research trends in islanding detection method-a comprehensive survey. J. Prot. Control Mod. Power Syst. 2018, 3, 1–20. [Google Scholar] [CrossRef]
- Chaitanya, B.K.; Yadav, A.; Pazoki, M.; Abdelaziz, A.Y. A comprehensive review of islanding detection methods. Uncertain. Mod. Power Syst. 2021, 211–256. [Google Scholar] [CrossRef]
- Gupta, N.; Dogra, R.; Garg, R.; Kumar, P. Review of islanding detection schemes for utility interactive solar photovoltaic systems. Int. J. Green Energy 2021, 19, 242–253. [Google Scholar] [CrossRef]
- Panigrahi, B.K.; Bhuyan, A.; Shukla, J.; Ray, P.K.; Pati, S. A comprehensive review on intelligent islanding detection techniques for renewable energy integrated power system. Int. J. Energy Res. 2021, 45, 14085–14116. [Google Scholar] [CrossRef]
- Raza, S.; Mokhlis, H.; Arof, H.; Laghari, J.A.; Wang, L. Application of signal processing techniques for islanding detection of distributed generation in distribution network: A Review. Energy Convers. Manag. 2015, 96, 613–624. [Google Scholar] [CrossRef]
- Sawas, A.M.; Woon, W.L.; Pandi, V.R.; Shaaban, M.F.; Zeineldin, H.H. A Multistage Passive Islanding Detection Method for Synchronous-Based Distributed Generation. IEEE Trans. Ind. Inform. 2022, 18, 2078–2088. [Google Scholar] [CrossRef]
- Bansal, Y.; Sodhi, R. A Statistical Features Based Generic Passive Islanding Detection Scheme for IIDGs system. IEEE Trans. Power Deliv. 2021, 37, 3176–3188. [Google Scholar] [CrossRef]
- Rabuzin, T.; Hohn, F.; Nordstrom, L. Computation of sensitivity-based islanding detection parameters for synchronous generators. Electr. Power Syst. Res. 2021, 190, 1–6. [Google Scholar] [CrossRef]
- Khosravi, H.; Samet, H.; Tajdinian, M. Robust Islanding Detection in Micro grids Employing Rate of Change of Kinetic Energy Over Reactive Power. IEEE Trans. Smart Grid 2022, 13, 505–515. [Google Scholar] [CrossRef]
- Ramachandradurai, S.; Krishnan, N.; Prabaharan, N. Unintentional passive islanding detection and prevention method with reduced non-detection zones. Energies 2022, 15, 3038. [Google Scholar] [CrossRef]
- Swarnkar, N.K.; Mahela, O.P.; Khan, B.; Lalwani, M. Identification of Islanding Events in Utility Grid with Renewable Energy Penetration Using Current Based Passive Method. IEEE Access 2021, 9, 93781–93794. [Google Scholar] [CrossRef]
- Zamani, R.; Moghaddam, M.P.; Panahi, H.; Sanaye-Pasand, M. Fast Islanding Detection of Nested Grids Including Multiple Resources Based on Phase Criteria. IEEE Trans. Smart Grid 2021, 12, 4962–4970. [Google Scholar] [CrossRef]
- Ropp, M.E.; Begovic, M.; Rohatgi, A. Prevention of Islanding in Grid-connected Photovoltaic Systems. Prog. Photovolt. Res. Appl. 1999, 7, 39–59. [Google Scholar] [CrossRef]
- Makwana, Y.M.; Bhalja, B.R. Experimental Performance of an Islanding Detection Scheme Based on Modal Components. IEEE Trans. Smart Grid 2019, 10, 1025–1035. [Google Scholar] [CrossRef]
- Jang, S.I.; Kim, K.H. An islanding detection method for distributed generations using voltage unbalance and total harmonic distortion of current. IEEE Trans. Power Deliv. 2004, 19, 745–752. [Google Scholar] [CrossRef]
- Ropp, M.E.; Begovic, M.; Rohatgi, A.; Kern, G.A.; Bonn, R.H.; Gonzalez, S. Determining the relative effectiveness of islanding detection methods using phase criteria and non-detection zones. IEEE Trans. Energy Convers. 2000, 15, 290–296. [Google Scholar] [CrossRef]
- Ye, Z.; Kolwalkar, A.; Zhang, Y.; Du, P.; Walling, R. Evaluation of anti-islanding schemes based on non-detection zone concept. IEEE Trans. Power Electron. 2004, 19, 1171–1176. [Google Scholar] [CrossRef]
- Reigosa, D.; Briz, F.; Charro, C.B.; Gurrero, J.M. Passive islanding detection using inverter non-linear effects. IEEE Trans. Power Electron. 2017, 32, 9434–9445. [Google Scholar] [CrossRef]
- Kim, I.-S. Islanding Detection Technique using Grid-Harmonic Parameters in the Photovoltaic System. Energy Procedia 2012, 14, 137–141. [Google Scholar] [CrossRef]
- Venkatramanan, D.; John, V. Modeling and analysis of passive networks using dynamic phasors for study of islanded inverters. In Proceedings of the 2017 IEEE Transportation Electrification Conference (ITEC-India), Pune, India, 13–15 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Venkatramanan, D.; John, V. Dynamic Phasor Modeling and Stability Analysis of SRF-PLL-Based Grid-Tie Inverter Under Islanded Conditions. IEEE Trans. Ind. Appl. 2019, 56, 1953–1965. [Google Scholar] [CrossRef]
- Samui, A.; Samantaray, S.R. Assessment of ROCPAD Relay for Islanding Detection in Distributed Generation. IEEE Trans. Smart Grid 2011, 2, 391–398. [Google Scholar] [CrossRef]
- Raza, S.; Mokhlis, H.; Arof, H.; Mohammad, H.; Laghari, J.A. Prioritization of different passive parameters for islanding detection on the basis of response analysis. In Proceedings of the IEEE International Conference on Power and Energy (PEcon), Melaka, Malaysia, 28–29 November, 2016; pp. 615–619. [Google Scholar] [CrossRef]
- Raza, S.; Mokhlis, H.; Arof, H.; Laghari, J.A.; Mohamad, H. A Sensitivity Analysis of Different Power System Parameters on Islanding Detection. IEEE Trans. Sustain. Energy 2016, 7, 461–470. [Google Scholar] [CrossRef]
- Raza, S.; Arof, H.; Mokhlis, H.; Mohamad, H.; Illias, H.A. Passive islanding detection technique for synchronous generators based on performance ranking of different passive parameters. IET Gener. Transm. Distrib. 2017, 11, 4175–4183. [Google Scholar] [CrossRef]
- Hoke, A.; SolarCity, S.M.; Nelson, A.; Miller, B.; Chakraborty, S.; Bell, F.; McCarty, M. Experimental Evaluation of PV Inverter Anti-Islanding with Grid Support Functions in Multi-Inverter Island Scenarios. NREL/TP-5D00-66732. 2016. Available online: https://www.osti.gov/biblio/1265055/ (accessed on 24 August 2022).
- Hoke, A.F.; Nelson, A.; Chakraborty, S.; Bell, F.; Mccarty, M. An Islanding Detection Test Platform for Multi-Inverter Islands Using Power HIL. IEEE Trans. Ind. Electron. 2018, 65, 7944–7953. [Google Scholar] [CrossRef]
- Al Hosani, M.; Qu, Z.; Zeineldin, H.H. A Transient Stiffness Measure for Islanding Detection of Multi-DG Systems. IEEE Trans. Power Deliv. 2015, 30, 986–995. [Google Scholar] [CrossRef]
- Singh, A.; Bhatia, S.R.; Chanana, S. An anti-islanding technique for grid-connected DG and multi-DG system. In Proceedings of the 2018 International Conference on Emerging Trends and Innovations in Engineering and Technological Research (ICETIETR), Ernakulam, India, 11–13 July 2018. [Google Scholar] [CrossRef]
- Kulkarni, N.K.; Khedkar, M. Performance Ranking of 36 Passive Parameters for Islanding Detection under Single and Multiple PCCs, Single and Multiple Inverter-Interfaced Distributed Generation Sources. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Kulkarni, N.K.; Khedkar, M. Promising Passive Candidates for detecting Single Inverter and Multi-inverter Unintentional island Formation at Different Locations in a Power Distribution Network. In Proceedings of the 2021 6th International Conference for Convergence in Technology (I2CT), Maharashtra, India, 2–4 January 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Kulkarni, N.K.; Khedkar, M. Determining potential passive islanding detection indicators for single-point single inverter, single-point multi-inverter and multi-point multi-inverter scenarios. CSEE J. Power Energy Syst. 2022, 8, 696–709. [Google Scholar] [CrossRef]
- IEEE Std 1547.1-2005; IEEE Standard Conformance Test Procedures for Equipment Interconnecting Distributed Resources with Electric Power Systems. IEEE: Piscataway, NJ, USA, 2005; pp. 1–62. [CrossRef]
- Kersting, W.H. Radial distribution test feeders. In Proceedings of the IEEE Power Engineering Society Winter Meeting Conference Proceedings, Columbus, OH, USA, 28 January–1 February 2001; pp. 908–912. [Google Scholar] [CrossRef]
- Mishra, P.P.; Bhende, C.N. Islanding detection using sparse S-transform in distributed generation systems. Electr. Eng. 2018, 100, 2397–2406. [Google Scholar] [CrossRef]
- Mishra, P.P.; Bhende, C.N. Islanding detection scheme for distributed generation systems using modified reactive power control strategy. IET Gener. Transm. Distrib. 2018, 13, 814–820. [Google Scholar] [CrossRef]
- Mishra, P.P.; Bhende, C.N.; Manikandan, M.S. Islanding detection using total variation-based signal decomposition technique. IET Energy Syst. Integr. 2019, 2, 22–31. [Google Scholar] [CrossRef]
- Mishra, P.P.; Bhende, C.N. Islanding Detection based on Variational Mode Decomposition for Inverter based Distributed Generation Systems. IFAC Papers OnLine 2019, 52, 306–311. [Google Scholar] [CrossRef]
- Zhang, N.; Sun, Q.; Yang, L.; Li, Y. Event-Triggered Distributed Hybrid Control Scheme for the Integrated Energy System. IEEE Trans. Ind. Inform. 2021, 18, 835–846. [Google Scholar] [CrossRef]
- Li, Y.; Gao, W.; Yan, W.; Huang, S.; Wang, R.; Gevorgian, V.; Gao, D. Data-driven Optimal Control Strategy for Virtual Synchronous Generator via Deep Reinforcement Learning Approach. J. Mod. Power Syst. Clean Energy 2021, 9, 919–929. [Google Scholar] [CrossRef]
- Mishra, A.; Jena, P. A Scheduled Intentional Islanding Method Based on Ranking of Possible Islanding Zone. IEEE Trans. Smart Grid 2021, 12, 1853–1866. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.no. | Symbol | Parameter Description |
|---|---|---|
| Fundamental type | ||
| 1–6 | V, I, f, θ, P, and Q | PCC voltage, current, frequency, phase angle between voltage and current, active power, and reactive power, respectively. |
| PCC voltage (V)-based combinations | ||
| 7–12 | ΔV/ΔT, ΔV/ΔI, ΔV/Δf, ΔV/Δθ, ΔV/ΔP, and ΔV/ΔQ | Disturbance in voltage for a change in time, current, frequency, phase angle, active power, and reactive power, respectively. |
| Current at PCC (I)-based combinations | ||
| 13–18 | ΔI/ΔT, ΔI/ΔV, ΔI/Δf, ΔI/Δθ, ΔI/ΔP, and ΔI/ΔQ | Disturbance in current for change in time, voltage, frequency, phase angle, active power, and reactive power, respectively. |
| Frequency at PCC (f)-based combinations | ||
| 19–24 | Δf/ΔT, Δf/ΔV, Δf/ΔI, Δf/Δθ, Δf/ΔP, and Δf/ΔQ | Disturbance in frequency for change in time, voltage, current, phase angle, active power, and reactive power, respectively. |
| Phase angle between PCC voltage and current (θ)-based combinations | ||
| 25–30 | Δθ/ΔT, Δθ/ΔV, Δθ/ΔI, Δθ/Δf, Δθ/ΔP, and Δθ/ΔQ | Disturbance in phase angle for change in time, voltage, current, frequency, active power, and reactive power, respectively. |
| Active power at PCC (P)-based combinations | ||
| 31–36 | ΔP/ΔT, ΔP/ΔV, ΔP/ΔI, ΔP/Δf, ΔP/Δθ, and ΔP/ΔQ | Disturbance in active power for change in time, voltage, current, frequency, phase angle, and reactive power, respectively. |
| Reactive power at PCC (Q)-based combinations | ||
| 37–42 | ΔQ/ΔT, ΔQ/ΔV, ΔQ/ΔI, ΔQ/Δf, ΔQ/Δθ, and ΔQ/ΔP | Disturbance in reactive power for change in time, voltage, current, frequency, phase angle, and active power, respectively. |
| Fundamental harmonic-based | ||
| 43–44 | THDV and THDI | Total harmonic Distortion (THD) of voltage and current at PCC |
| 45–46 | HF5V and HF5I | 5th harmonic factor (HF) of voltage and current at PCC, respectively. |
| Fundamental harmonic-based combinations | ||
| 47–52 | THDV*THDI, THDV*HF5V, THDV*HF5I, THDV/THDI, THDV/HF5V, and THDV/HF5I | |
| 53–54 | THDI*HF5V and THDI*HF5I | |
| 55–57 | THDI/THDV, THDI/HF5V, and THDI/HF5I | |
| 58 | HF5V*HF5I | |
| 59–61 | HF5V/THDV, HF5V/THDI, and HF5V/HF5I | |
| 62–64 | HF5I/THDV, HF5I/THDI, and HF5I/HF5V | |
| Distribution Test Feeder (DTF) | DTF-1 | DTF-2 | DTF-3 |
|---|---|---|---|
| Number of buses | 13 | 34 | 37 |
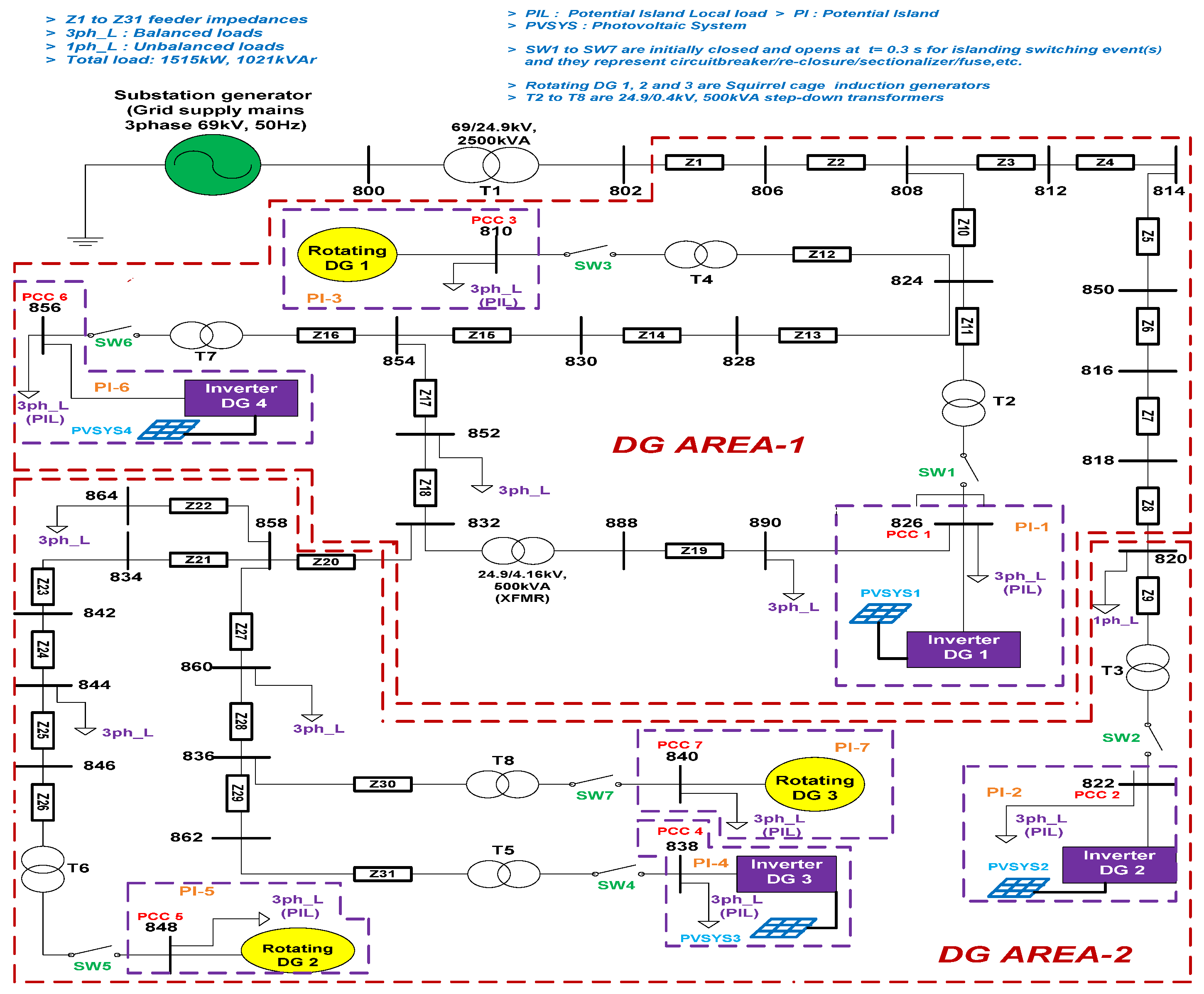
| Grid supply (mains) | 115 kV 3-phase, 50 Hz | 69 kV 3-phase, 50 Hz | 230 kV 3-phase, 50 Hz |
| Substation transformer rating | 115 kV/4.16 kV 5000 kVA | 69 kV/24.9 kV 2500 kVA | 230 kV/4.8 kV 2500 kVA |
| Connection type | delta-grounded Y | delta-delta | |
| XFMR (Step-down transformer) | 4.16 kV/0.4 kV 500 kVA | 24.9 kV/4.16 kV 500 kVA | 4.8 kV/0.4 kV 500 kVA |
| Connection type | grounded Y-grounded Y | delta-delta | |
| Feeder lines | 3-phase balanced type | ||
| Net active power load | 975 kW | 1515 kW | 1059 kW |
| Net reactive power load | 660 kVAr | 1021 kVAr | 513 kVAr |
| Number of DG sources integrated into three DTFs | 04 | 07 | 10 |
| All PV inverter and rotating-based DGs are integrated into DTF-1, DTF-2, and DTF-3 at different buses through 3-phase 4.16/0.4 kV, 500 kVA, 24.9/0.4 kV, 500 kVA, and 4.8/0.4 kV, 500 kVA step-down transformers, respectively. | |||
| Type-1 * | 02 | 04 | 06 |
| * Type-1: PV inverter-based DG source (80 kW output, 400 Vac, 600 Vdc, and 20 kHz switching frequency voltage source inverter operating at unity power factor) | |||
| Type-2 * | 02 | 03 | 04 |
| * Type-2: Rotating-based DG source (75 kW and 100 kVAr power output, 400 Vac, and 1484 RPM Squirrel Cage Induction Generator) | |||
| PV inverter DG integration level | 3.2% | 12.8% | 19.2% |
| Rotating DG integration level | 5% | 15% | 20% |
| Total DG sources integration level | 8.2% | 27.8% | 39.2% |
| S.no. | Type of Island Formation | At PCC Point(s) | DG Source(s) Islanded Possible Combinations | No. of Switches Opening | Islanding Simulations |
|---|---|---|---|---|---|
| DTF-1 (IEEE 13 bus system shown in Figure 2) | |||||
| 1–4 | * Category I | Opening of switches SW1 to SW4 at PCC 1, 2, 3, and 4 | PV inverter DG1 and DG2 | one | (1 × 8(no. of different types of local loads) × 21 (no. of loading values)) × 4 |
| Rotating DG1 and DG2 | |||||
| 5–6 | * Category II | PV inverter DG1 and DG2 | two | (1 × 8 × 21) × 2 | |
| Rotating DG1 and DG2 | |||||
| 7–11 | * Category III | both PV inverter DG1, DG2, and Rotating DG1, DG2 | two and four | (1 × 8 × 21) × 5 | |
| Total number of islanding event simulations for DTF-1 = (1 × 8 × 21) × 11 = 1848 | |||||
| DTF-2 (IEEE 34 bus system shown in Figure 3) | |||||
| 1–7 | * Category I | Opening of switches SW1 to SW7 at PCC 1, 2, 3, 4, 5, 6, and 7 | PV inverter DG1, DG2, DG3, and DG4 | one | (1 × 8 × 21) × 7 |
| Rotating DG1, DG2, and DG3 | |||||
| 8–22 | * Category II | PV inverter DG1, DG2, DG3, and DG4 | two, three, and four | (1 × 8 × 21) × 15 | |
| Rotating DG1, DG2, and DG3 | |||||
| 23–75 | * Category III | both PV inverter DG1, DG2, DG3, DG4, and Rotating DG1, DG2, and DG3 | two, four, five, six, and seven | (1 × 8 × 21) × 53 | |
| Total number of islanding event simulations for DTF-2 = (1 × 8 × 21) × 75 = 12,600 | |||||
| DTF-3 (IEEE 37 bus system shown in Figure 4) | |||||
| 1–10 | * Category I | Opening of switches SW1 to SW10 at PCC 1, 2, 3, 4, 5, 6, 7, 8, 9 and 10 | PV inverter DG1, DG2, DG3, DG4, DG5, and DG6 | one | (1 × 8 × 21) × 10 |
| Rotating DG1, DG2, DG3, and DG4 | |||||
| 11–68 | * Category II | PV inverter DG1, DG2, DG3, DG4, DG5, and DG6 | two, three, four, five, and six | (1 × 8 × 21) × 58 | |
| Rotating DG1, DG2, DG3, and DG4 | two, three, and four | ||||
| 69–258 | * Category III | both PV inverter DG1, DG2, DG3, DG4, DG5, DG6, and Rotating DG1, DG2, DG3, and DG4 | two, four, six, eight, nine, and ten | (1 × 8 × 21) × 190 | |
| Total number of islanding event simulations for DTF-3 = (1 × 8 × 21) × 258 = 43,344 | |||||
| * Category-I: Single DG(* type-1) Single location and Single DG(* type-2)-single location island formations * Category-II: Multi-DG(* type-1) Multi-location and Multi-DG(* type-2)-Multi-location island formations * Category-III: Multi-DG(both * type-1 and * type-2) Multi-location island formations | |||||
| * Type-1 DG source is PV inverter-based and * Type-2 DG source is Rotating-based | |||||
| S.no. | Category * | Range of Variation | Non-Islanding Simulations |
|---|---|---|---|
| DTF-1: IEEE 13 bus distribution test feeder shown in Figure 2 | |||
| 1–6 | * Passive load switching at all ‘4′ PCC points and other buses, i.e., 633, 692, 645, 684, and 650 at t = 0.3 s | (100 to 290) kVAr for capacitive and inductive banks and (100 to 290) kW for the resistive bank in steps of 10 kW and 10 kVAr | ((‘20’ i.e., no. of values) × (‘4’, i.e., no. of PCC points + ‘5’, i.e., no. of other buses)) × 6 = (20 × (4 + 5)) × 6 |
| 7 | Switching ON DG sources (both PV inverter-based and rotating-based DG sources) at buses 633, 692, 645, 684, and 650 at t = 0.3 s | 5 (no. of other buses) * 2 (no. of DGs) | |
| 8 | Switching ON a non-linear load (a 3-phase diode rectifier) at buses 633, 692, 645, 684, and 650 at t = 0.3 s | 5 (no. of other buses) | |
| Total number of non-islanding event simulations for DTF-1 = (20 × 9 × 6)+ (5 × 2) + 5 = 1095 | |||
| DTF-2: IEEE 34 bus distribution test feeder shown in Figure 3 | |||
| 1–6 | * Passive load switching at all ‘7’ PCC points and other buses i.e., 828, 808, 818, 836, 842, 802 at t = 0.3 s | (1000 to 2900) kVAr and (1000 to 2900) kW in steps of 100 kW and 100 kVAr | (20 × (7 + 6)) × 6 |
| 7 | Switching ON a DG source (both PV inverter-based and rotating-based DG sources)at buses 828, 808, 818, 836, 842, 802 at t = 0.3 s | 6 × 2 | |
| 8 | Switching ON a non-linear load (a 3-phase diode rectifier) at buses 828, 808, 818, 836, 842, 802 at t = 0.3 s | 6 | |
| Total number of non-islanding event simulations for DTF-2 = (20 × 13 × 6) + (6 × 2) + 6 = 1578 | |||
| DTF-3: IEEE 37 bus distribution test feeder shown in Figure 4 | |||
| 1–6 | * Passive load switching at all ‘10’ PCC points and at other buses i.e., 703, 744, 710, 720, 705, and 709 at t = 0.3 s | (1000 to 2900) kVAr and (1000 to 2900) kW in steps of 100 kW and 100 kVAr | (20 × (10 + 6)) × 6 |
| 7 | Switching ON a DG source (both PV inverter-based and rotating-based DG sources) at buses 703, 744, 710, 720, 705, and 709 at t = 0.3 s | 6*2 | |
| 8 | Switching ON a non-linear load (a 3-phase diode rectifier) at buses 703, 744, 710, 720, 705, and 709 at t = 0.3 s | 6 | |
| Total number of non-islanding event simulations for DTF-3 = (20 × 16 × 6) + (6 × 2) + 6 = 1938 | |||
| * Passive load switching refers to switching ON/OFF of 3-phase capacitive, inductive, and resistive banks | |||
| * Power system faults [20] are not as considered since at any given location on three DTFs if a fault occurs, DG sources will feed the fault, and eventually those DGs have to shut down, i.e., DG sources are isolated from the grid. | |||
| Expression | Symbol | Description |
|---|---|---|
| (8)–(10), (13)–(15), and (18)–(20) | Pai,j, Pbi,j, Pci,j Pam,n, Pbm,n, Pcm,n Par,s, Pbr,s, and Pcr,s | These notations represent passive parameter P’s instantaneous normal and islanding values. Where i, m, and r are no. of power mismatch values, j, n, and s are no. of islanding switching events and a, b, and c represent different types of islanding switching events i.e., ISW1, ISW2, and ISW3 for DTF-1, DTF-2, and DTF-3, respectively, at a given PCC point. |
| (11), (16), and (21) | PAV_ISW1,x, PAV_ISW2,x, PAV_ISW3,x PAV_ISW1,y, PAV_ISW2,y, PAV_ISW3,y PAV_ISW1,z, PAV_ISW2,z, and PAV_ISW3,z | These notations represent averaging of three types of islanding switching events for a particular load ‘x’ for DTF-1, ‘y’ for DTF-2, and ‘z’ for DTF-3 at a given PCC point for a parameter ‘P’. |
| (12) (17), and (22) | PIAV_PCC1_DTF-1, PIAV_PCC1_DTF-2, and PIAV_PCC1_DTF-3 | These notations represent final averaged normal and islanding values for DTFs-1, 2, and 3, respectively, at a PCC point for a parameter ‘P’. |
| Expression | Symbol | Description |
|---|---|---|
| DTF-1 (shown in Figure 2) | ||
| (23) | Pa,i, Pb,j, and Pc,k | These notations represent passive parameter P’s instantaneous normal and non-islanding values where i, j, and k are the number of capacitive/inductive/resistive loading values. |
| PNIAV_PCC1_DTF-1 | Passive parameter P’s averaged non-islanding value for PCC1 for DTF-1. | |
| DTF-2 (shown in Figure 3) | ||
| (24) | Pa,m, Pb,n, and Pc,o | These notations represent passive parameter P’s instantaneous normal and non-islanding values where m, n, and o are the number of capacitive/inductive/resistive loading values. |
| PNIAV_PCC1_DTF-2 | Passive parameter P’s averaged non-islanding value for PCC1 for DTF-2. | |
| DTF-3 (shown in Figure 4) | ||
| (25) | Pa,x, Pb,y, and Pc,z | These notations represent passive parameter P’s instantaneous normal and non-islanding values where x, y, and z are the number of capacitive/inductive/resistive loading values. |
| PNIAV_PCC1_DTF-3 | Passive parameter P’s averaged non-islanding value for PCC1 for DTF-3. | |
| a, b, and c represent different categories of non-islanding events (as per Table 4), i.e., passive load switching, switching ON a DG source, and switching ON a non-linear load in expressions (23)–(25) for DTF-1, DTF-2, and DTF-3, respectively. | ||
| PCC Point | Effective Passive Parameters for DTF-1 (3.2% PV Inverter and 5% Rotating DG Integration Levels) | DG Area (Figure 2) | ||
|---|---|---|---|---|
| LPM | MPM | HPM | ||
| 1 | ΔI/ΔƟ, ΔQ/ΔT, ΔQ/ΔI, and THDV/HF5I | ΔI/ΔT, ΔƟ/Δf, ΔQ/ΔT, ΔQ/ΔI, and THDV/HF5I | ΔI/ΔT, ΔI/ΔP, ΔƟ/Δf, ΔP/ΔT, ΔQ/ΔT, ΔQ/ΔI, and THDV/HF5I | 1 |
| In a similar manner, the effective passive parameters (whose final performance value is ‘1’) are obtained for remaining PCC points 2, 3, and 4, respectively, using the procedure shown inFigure 5. | ||||
| PCC Point | Effective Passive Parameters for DTF-2 (12.8% PV Inverter and 15% Rotating DG Integration Levels) | DG Area (Figure 3) | ||
| LPM | MPM | HPM | ||
| 1 | f, ΔV/ΔT, ΔV/Δf, ΔV/ΔP, ΔV/ΔQ, ΔI/Δf, ΔI/ΔP, ΔI/ΔQ, ΔƟ/ΔI, ΔƟ/Δf, ΔƟ/ΔP, ΔƟ/ΔQ, THDI, HF5I, THDV*THDI, THDV*HF5I, THDI*HF5V, THDI*HF5I, THDI/THDV, THDI/HF5V, HF5V*HF5I, HF5I/THDV, and HF5I/HF5V | f, ΔV/ΔT, ΔV/Δf, ΔV/ΔP, ΔV/ΔQ, ΔI/Δf, ΔI/ΔP, ΔI/ΔQ, ΔƟ/ΔI, ΔƟ/Δf, ΔƟ/ΔP, ΔƟ/ΔQ, THDI, HF5I, THDV*THDI, THDV*HF5I, THDI*HF5V, THDI*HF5I, THDI/THDV, THDI/HF5V, HF5V*HF5I, HF5I/THDV, and HF5I/HF5V | f, ΔV/ΔT, ΔV/Δf, ΔV/ΔP, ΔV/ΔQ, ΔI/Δf, ΔI/ΔP, ΔI/ΔQ, ΔƟ/ΔI, ΔƟ/Δf, ΔƟ/ΔP, ΔƟ/ΔQ, THDI, HF5I, THDV*THDI, THDV*HF5I, THDI*HF5V, THDI*HF5I, THDI/THDV, THDI/HF5V, HF5V*HF5I, HF5I/THDV, and HF5I/HF5V | 1 |
| In a similar manner, the effective passive parameters (whose final performance value is ‘1’) are obtained for the remaining PCC points 2, 3, 4, 5, 6, and 7, respectively, using the procedure shown inFigure 5. | ||||
| PCC Point | Effective Passive Parameters for DTF–3 (19.2% PV Inverter and 20% Rotating DG Integration Levels) | DG Area (Figure 4) | ||
| LPM | MPM | HPM | ||
| 1 | f, ΔI/ΔV, ΔƟ/ΔT, ΔƟ/ΔQ, ΔP/ΔV, ΔP/ΔI, THDI, HF5I, THDV*THDI, THDV*HF5I, THDI*HF5V, THDI*HF5I, THDI/THDV, HF5V*HF5I, HF5I/THDV, and HF5I/HF5V | f, ΔI/ΔV, ΔƟ/ΔT, ΔƟ/ΔQ, ΔP/ΔV, ΔP/ΔI, THDI, HF5I, THDV*THDI, THDV*HF5I, THDI*HF5V, THDI*HF5I, THDI/THDV, HF5V*HF5I, HF5I/THDV, and HF5I/HF5V | f, ΔƟ/ΔT, ΔƟ/ΔQ, ΔP/ΔV, ΔP/ΔI, ΔQ/Δf, THDI, HF5I, THDV*THDI, THDV*HF5I, THDI*HF5V, THDI*HF5I, THDI/THDV, HF5I/THDV, and HF5I/HF5V | 2 |
| In a similar manner, the effective passive parameters (whose final performance value is ‘1’) are obtained for the remaining PCC points 2, 3, 4, 5, 6, 7, 8, 9, and 10, respectively, using the procedure shown inFigure 5. | ||||
| Type of Data and Computational Burden (for a Given Passive Parameter) | Prioritization Scheme Given in [32,33,34,39,40] | Averaging Approach-Based Prioritization Scheme Given in [41] | Proposed MAAC-Based Prioritization Methodology |
| Islanding values are themselves threshold values in these schemes | Threshold values are obtained from DG grid-interconnection standards [6,7,10] | ||
| Islanding values data size (as per Table 3) | 1848 (DTF-1), 12,600 (DTF-2), and 43,344 (DTF-3) | 1 (for DTF-1, DTF-2, and DTF-3) | |
| Non-islanding values data size (as per Table 4) | 1095 (DTF-1), 1578 (DTF-2), and 1938 (DTF-3) | 1 (for DTF-1, DTF-2, and DTF-3) | |
| Threshold values data size | 1848 (DTF-1), 12,600 (DTF-2), and 43,344 (DTF-3) | 1 (for DTF-1, DTF-2, and DTF-3) | |
| Percentage reduction in islanding values data size | 0% (for DTF-1, DTF-2, and DTF-3) | 99.95% (DTF-1), 99.99% (DTF-2), and 99.99% (DTF-3) | |
| Percentage reduction in non-islanding values data size | 0% (for DTF-1, DTF-2, and DTF-3) | 0% (for DTF-1, DTF-2, and DTF-3) | 99.91% (DTF-1), 99.94% (DTF-2), and 99.95% (DTF-3) |
| Percentage reduction in threshold value data size | 0% (DTF-1), 0% (DTF-2), and 0% (DTF-3) | 99.95% (DTF-1), 99.99% (DTF-2), and 99.99% (DTF-3) | |
| Computational burden (obtained by computing the number of comparisons) | Here, the number of comparisons required is obtained by computing, i.e., (no. of averaged islanding values + no. of averaged non-islanding values) * no. of threshold values for the proposed MAAC methodology. | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kulkarni, N.K.; Khedkar, M.; Bhende, C.N.; Singh, S.K. Prioritization of Passive Parameters from Modified Averaging Approach-Based Computation (MAAC) Methodology for Ascertaining Formation of Single and Multi-Location Unintentional Islands. Energies 2022, 15, 6441. https://doi.org/10.3390/en15176441
Kulkarni NK, Khedkar M, Bhende CN, Singh SK. Prioritization of Passive Parameters from Modified Averaging Approach-Based Computation (MAAC) Methodology for Ascertaining Formation of Single and Multi-Location Unintentional Islands. Energies. 2022; 15(17):6441. https://doi.org/10.3390/en15176441
Chicago/Turabian StyleKulkarni, Nitin Kumar, Mohan Khedkar, Chandrashekhar Narayan Bhende, and Sunil Kumar Singh. 2022. "Prioritization of Passive Parameters from Modified Averaging Approach-Based Computation (MAAC) Methodology for Ascertaining Formation of Single and Multi-Location Unintentional Islands" Energies 15, no. 17: 6441. https://doi.org/10.3390/en15176441
APA StyleKulkarni, N. K., Khedkar, M., Bhende, C. N., & Singh, S. K. (2022). Prioritization of Passive Parameters from Modified Averaging Approach-Based Computation (MAAC) Methodology for Ascertaining Formation of Single and Multi-Location Unintentional Islands. Energies, 15(17), 6441. https://doi.org/10.3390/en15176441