1. Introduction
Crosswind action on a train poses a risk of vehicle overturning or derailment. The risk is elevated not only when wind speed is high, but also in such scenarios as a sudden gust of wind while exiting a tunnel, or when running on a bridge or around curves. Recent trends of increasing train speeds and reducing their weight to lower the energy consumption and track wear are also adverse to safety. In recent years, there have been several accidents caused by strong wind, such as the train overturn in Xinjiang in China in 2007 [
1], Lenk in Switzerland in 2018 [
2], or Walton in Harvey County in 2019 [
3] to name a few. The topic of wind effects on rail vehicles remains of researchers’ interest, and dedicated technical standards are being developed and updated.
Establishing the safety criteria is a multidisciplinary topic, as air–train–track interaction needs to be considered [
4,
5]. However, one of the first steps is determining aerodynamic forces and moments acting on the train. Full-scale experiments are costly, time-consuming, and give little control over the conditions such as wind speed and direction. Despite the difficulties, some research work has been conducted on a full scale [
6,
7]. Wind tunnel experiments performed in a reduced scale are much more common. In the last decade, a tool that proved to be useful as complementary to the experiment is the computational fluid dynamics (CFD). Computer simulation reduces the number of experiments that need to be carried out, reduces overall design costs, enables decisions in the early stages of the design process, and allows for an analysis of scenarios that cannot be tested in wind tunnels. Even though CFD in railway industry has become widespread, as evidenced by, inter alia, developed norms [
8], it involves a number of challenges—obtaining reliable results is strictly dependent on the used simulation methodology. Norms such as EN 14067-6:2018 allow rolling stock assessment based solely on numerical simulations for train speeds up to a maximum of 200 km/h, however, the appropriateness of the CFD approach has to be firstly demonstrated on a benchmark case. The norms themselves are written in a way that simulation requirements are given, but the simulation methodology is not defined. In order to list the most important key points from the point of view of simulation, it is necessary to indicate: the method of preparing the model and numerical mesh, the selected calculation methods, a reliable representation of boundary conditions, and the modeling of turbulence. While each of the elements mentioned above is necessary to obtain reliable results, most discussion is devoted to the selection of an appropriate turbulence model.
In the context of numerical simulation of vehicle aerodynamics, the literature contains mostly publications devoted to car aerodynamics. CFD is commonly used in the design process to analyze the flow around motorcycles [
9] and race cars [
10,
11], as well as civilian ones [
12,
13]. Over the past twenty years, simulation methodologies have been developed, and individual approaches’ strengths and weaknesses have been identified [
14,
15,
16]. In the case of numerical analyses of the crosswind affecting trains, the literature is more modest, and many questions remain unanswered. Most of the works reproduce an experimental procedure in which the forces and moments acting on a train subjected to air flow are measured. The train is placed in a tunnel and rotated.
However, in contrast to experimental studies, usually yaw angles tested numerically do not exceed 50 degrees. A summary of the most relevant publications on the topic of CFD simulations of trains in crosswind is presented in the
Appendix A in
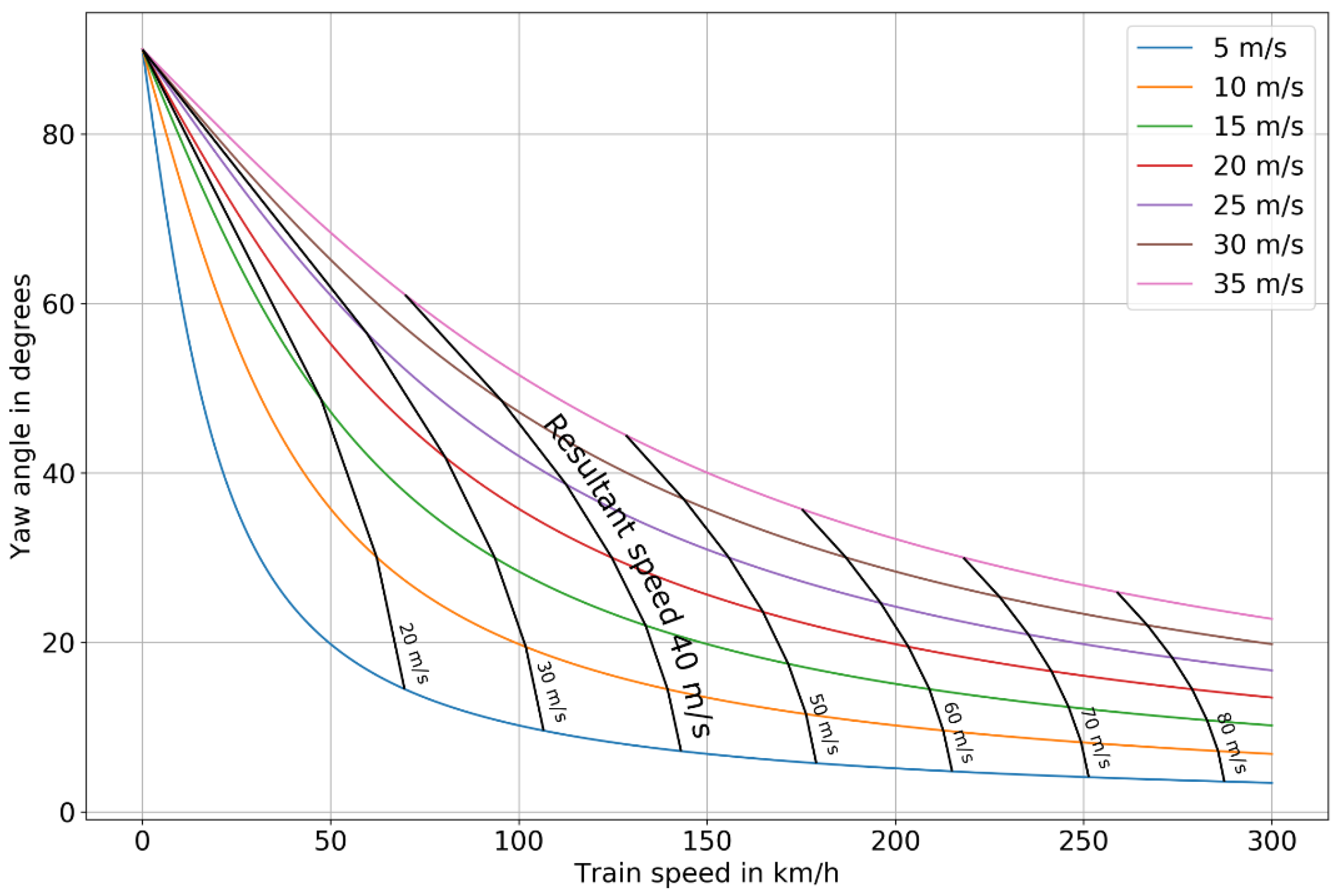
Table A1. In eleven numerical studies devoted to crosswinds, only two investigated the full range of angles, of which only one performed a comparison with experimental data. From the Paradot et al. study [
17], one can observe good convergence of the numerical model with experiments for small angles and much larger errors for larger angles. In their research, however, Paradot et al. did not deal with a more detailed study of turbulence models’ accuracy and the ability to predict the phenomena occurring for larger angles. Limited tested angle range is only partially justified by the maximum yaw angles obtained at full train speed. If a strong side wind was blowing at 35 m/s for a high-speed train running at 150 km/h, it would correspond to a yaw angle of 40 degrees. Larger yaw angles are present for regional trains due to their lower running speed. As seen in
Figure 1, inflows from angles exceeding 50 degrees are still important as they can occur during acceleration or standstill of the train. Examples of overturning accidents that occurred for a train in standstill or moving below 70 km/h are St. Nicolas in Great Britain in 2015, an Ohio bridge in the USA in 2008, the Chikuhi line in Japan in 1998, or the Kosei line in Japan in 1997 [
18].
Figure 2 shows the schematic diagram with velocity vectors. Considering the wind velocity
vw with angle relative to track
β and train velocity
vt, the resultant velocity
vr and yaw angle α can be calculated.
The effect of crosswinds is usually presented in the form of a plot of the forces and moments or their coefficients acting on the train as a function of the yaw angle.
Figure 3 shows the most important, from the point of view of train overturning,
x moment coefficients as a function of yaw angle. Distinct parts can be observed in the characteristic curves. After the initial increase, the moment value reaches the maximum, then decreases or stabilizes at a relatively constant value for the largest angles. As can be seen, the shape of the train body, track configuration, and the turbulence level all affect the characteristic curves. For high values of turbulence, the maximum values of lateral forces occur for larger angles, such as 70 degrees [
19]. For larger angles, there are also fundamental differences in simulation methodology planning. Large flow instabilities occur during inflows from angles above 50 degrees. Due to that, the flow around the train is not a trivial scenario from the turbulence modeling standpoint. Regardless, an industry standard is to apply Reynolds-averaged Navier–Stokes (RANS)-based turbulence models. Their computational cost related to more complex unsteady numerical methods, such as scale resolving simulations (SRSs) used in [
20,
21,
22], is orders of magnitude lower. An important open question remains about RANS-based models’ accuracy, especially within the aforementioned range of yaw angles.
The novelty of the article is a comprehensive wind flow analysis at a large yaw angles range of 10–90° for widely used RANS turbulence models. It is a challenging situation from a numerical standpoint, as large separation zones and flow unsteadiness may be expected, which may result in significant differences between RANS-based models. The predictive performance of popular RANS-based models in that regime has not been reported extensively. The most common turbulence models are studied to assess their accuracy and answer the questions:
How significant are the differences between the RANS-based models in the large yaw angle range?
What causes these differences?
Which model fits the experimental data best?
Finally, a methodology for fitting a relatively new generalized
k–ω (GEKO) turbulence model to the experimental data is proposed, as an alternative to classical solutions. Successful attempts of tuning the GEKO model were reported in the literature, e.g., in the case of jet flows [
23], combustion [
24], compressible flows [
25], and marine hydrodynamics [
26], but to the authors’ knowledge, no attempt of tuning a GEKO model for a train in a crosswind scenario has been reported yet.
2. Materials and Methods
As a test model, a TGV Duplex power car was chosen, as it is one of the benchmark cases described in the norm [
8]. There are experimental results available that could be taken as the reference values. Simulations concern a full-scale TGV Duplex power car on a single track with ballast and rail, shown in
Figure 4. Standard gauge track of 1435 mm was used. The reference data were based on a single data set measured in the CSTB wind tunnel in Nantes in scale 1:15. The aerodynamic coefficients were measured for the case of zero tilting angle.
The pitching moment coefficient against the leeward rail
Cmx,lee is defined according to the norm [
8], and is shown with the applied coordinate system in
Figure 5. Aerodynamic loads were captured only for the leading train and they were scaled using the reference length
d0 = 3 m and reference area
A0 = 10 m
2. The air density was set as constant equal to 1.225 kg/m
3 and the reference velocity was equal to the inlet wind speed of 32 m/s.
2.1. Geometry and Computational Domain
Aerodynamically significant features on the train side and roof were modeled. The wheels were flattened to prevent point contact with the ground and the pantograph was not modeled, which is a common practice and is allowed by the norm.
Velocity
v = 32 m/s was applied at inlet. It corresponds to the wind speed that caused the train overturning at Horei Iwate in Japan in 1994. The resultant Reynolds number was ca. 6.5 × 10
6. It is commonly assumed that in the range of large Reynolds numbers, force and moment coefficients are independent of the Reynolds number. Technical Specifications for Interoperability (TSI) [
27] specify the minimum Reynolds number of 0.25 × 10
6 to ensure no Reynolds number scaling effects occur. The velocity at the inlet was uniform, to agree with the specifications for wind tunnel measurements.
In the wind tunnel experiments, it was assumed that the boundary layer thickness
δ99% shall not exceed 30% of the vehicle height and that the turbulence level does not exceed 2.5%. Therefore, low-turbulence intensity boundary conditions were applied in the simulation: turbulence intensity at a low value of 2% and turbulent length scale 0.01 m. High turbulence intensity can have a significant impact on the results for large yaw angles, as shown in [
19].
All wall surfaces were stationary. No-slip condition was applied to the walls, which means the velocity at the walls was zero. Side and top surfaces were given symmetry boundary conditions, i.e., zero normal velocity vn and zero gradient of all quantities ∂φ/∂n = 0. Zero gauge static pressure p was prescribed at the outlet.
Appropriate domain size was set to not interfere with the flow around the vehicle. The domain lengths upstream and downstream were equal to 20
H and 33
H, respectively, where
H is the train height. The blockage ratios, as well as upstream and downstream size of the domain, were defined based on the norm requirements. Exact dimensions are shown in
Figure 6 for an exemplary yaw angle of 55 degrees.
2.2. Mesh
A relatively uniform surface mesh was applied to the train body, as shown in
Figure 7a. Three box-shaped refinement regions were added in the vicinity of the train to capture regions of high pressure and velocity gradients. Location, shape, and size of refinement regions are not specified in the norm. It was firstly selected based on our experience and literature review. At a later step, regions of large gradients were displayed to confirm the validity of the adopted meshing methodology. The mesh design has been kept for all the studied yaw angles.
Volume mesh consisted of tetrahedral elements with a prism boundary layer, as shown in
Figure 7b. The boundary layer mesh consisted of 10 elements. The dimensionless wall distance
y+ for the first cell layer on the train surface was kept in the range of wall function validity. Other studies [
28] have shown that in this simulation scenario the approach with the first cell in the viscous sublayer to represent the near-wall regime does not seem favorable over wall functions.
It was important to consider geometrical features at the meshing stage, as even small features may have a significant impact on the flow structure. One such example was a sharp edge on the roof, which is present in the original geometry. For large yaw angles, it defines the separation point. If this feature was not preserved explicitly at the meshing stage, flow would remain attached to the roof.
Figure 8 shows a comparison of flow structures on the train roof in the middle of the leading train, for a yaw angle of 80 degrees. With a correctly preserved sharp edge on the roof, a clear separation line was visible. Without the sharp edge, flow remained attached to the roof. As a result, there was a relative difference of 10% in rolling moment coefficient between these two cases.
Grid sensitivity was assessed by changing the tetrahedral cell size in the region of high pressure and velocity gradients, shown in
Figure 9. Characteristic cell size was changed by a factor of 1.5. The grid independence test has been performed for two yaw angles, 20 degrees and 75 degrees.
The results showed good agreement in terms of flowfield and moment coefficients, as shown in
Table 1. The relative differences of rolling moment coefficient for the small angle of 20 degrees did not exceed 2% for all the studied meshes. In the case of a large yaw angle, 75 degrees, the differences did not exceed 3%. It was therefore assumed that further computations could be continued on the 46 mln mesh.
2.3. Solver
All presented simulations were performed in ANSYS Fluent software version 2021 R2, in which incompressible Reynolds-averaged Navier–Stokes (RANS) equations were solved using a finite-volume method. Using the Einstein summation convention, the continuity equation takes the form of:
and the momentum conservation equation can be written as:
where
vi represents the
i-th component of velocity at a point
xi in space,
ρ is the fluid density,
p represents the static pressure,
μ is the dynamic viscosity,
δij is the Kronecker delta, bars denote averaged values, and apostrophes represent fluctuating values. In steady-state RANS, the transient term in Equation (2) vanishes. Due to the Reynolds stress tensor
, the closure problem arises, and additional equations are needed. They are supplemented by turbulence models, which can be roughly categorized in two basic groups: models that solve transport equations for Reynolds stress tensor components and models that follow the Boussinesq hypothesis and introduce turbulent viscosity. The turbulence models selected for this work belong to the latter group. It is assumed that the Reynolds stress tensor is proportional to the mean strain rate tensor:
where
μt is the turbulent viscosity.
The following models were used: Spalart–Allmaras, realizable
k–ε with standard wall function and a production limiter, and
k–ω SST. These models are commonly used in external aerodynamics. Additionally,
k–ω GEKO with various tunable coefficients settings was tested. The complete list of studied turbulence models can be found in
Section 3.4.
The aforementioned RANS models are widely used in external aerodynamics despite a number of inherent limitations. It is known that they are mostly unable to correctly represent the behavior of the detachment regions and transient effects. At the same time, these models make it possible to predict the behavior of the boundary layer quickly and accurately. The accuracy of RANS models depends on many factors, one of the most significant being the shape of a streamlined object. In the literature, one can find many publications devoted to the accuracy of classical turbulence models, such as: for the body of a sedan-type passenger car, Zhang et al. [
29] obtained values of aerodynamic coefficients in the error range of 1.3–13.8% compared to the experiment. The most accurate results were obtained with the
k–ε model. In the study of car aerodynamics conducted by Kurec et al. [
30], discrepancies in the results from different turbulence models depending on the rear wing’s angle were observed. In a paper by Ashton et al. [
31], based on Ahmed and DrivAer body simulations, it was summarized that RANS models are sensitive to car body types and it is difficult to determine guidelines for choosing a particular turbulence model in the general case. It was estimated that 5% is the limit of the models’ accuracy—more costly hybrid or LES models are needed to achieve higher accuracies. Thus, in the classical approach, one of the important elements of planning a numerical experiment is the selection of a turbulence model. Even with reference data in the form of experimental results, calibration is carried out in a discrete way: we can choose specific turbulence models, possibly modifying some used submodels. A completely different approach was proposed in [
16] by Menter, Lechner, and Matyushenko, who presented the GEKO model—destined to become a new paradigm in turbulence modeling.
The GEKO turbulence model provides six free parameters that can be calibrated based on experimental data. A list of tunable parameters together with their roles is shown in
Table 2. With default settings (
CSEP = 1.75,
CNW = 0.5,
CJET = 0.9, and
CMIX calculated from a correlation), GEKO is supposed to mimic the performance of the
k–ω SST model. In addition to the seamless adjustment of parameters themselves, even locally, what sets the GEKO model apart from other models is its attempt to link parameters to specific flow phenomena.
A pressure-based solver, implicit formulation, and Green–Gauss node-based method for the calculation of gradients were used for all the studied cases. Simulations were performed in steady-state and the coupled pseudo-transient scheme was applied for pressure–velocity coupling. Second-order spatial discretization was set for pressure and momentum. For comparative purposes, for yaw angles of 60° and 80°, transient simulations were also performed with Δt = 70 ms.
Forces and moments acting on the train were monitored throughout the iterative calculation process. The convergence criteria were stabilized residuals and stabilized forces and moment monitors. If oscillations were present, then iterative calculations were run until 5–10 periods of stable oscillations were captured. The iteration errors were an order of magnitude lower than the discretization errors.
Unless noted as instantaneous values, presented data concern averaged data from stable oscillation cycles. Nondimensional velocity, which is reported in contour maps and vector fields, is the local velocity divided by the inlet velocity of 32 m/s.
2.4. Computational Resources
Calculations were performed on the high-performance computing infrastructure provided by the National Centre for Nuclear Research (Poland). The average calculation time of a single case on 200 physical cores (i.e., 5 computational nodes as specified in
Table 3) was 130 min. The calculation time was measured as the difference between job start and finish, so it includes reading mesh and saving case and data files.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}