

A Study on the Train Brake Position-Based Control Method for Regenerative Inverters

Abstract
:1. Introduction
2. Selecting Optimal Location and Capacity of Inverter
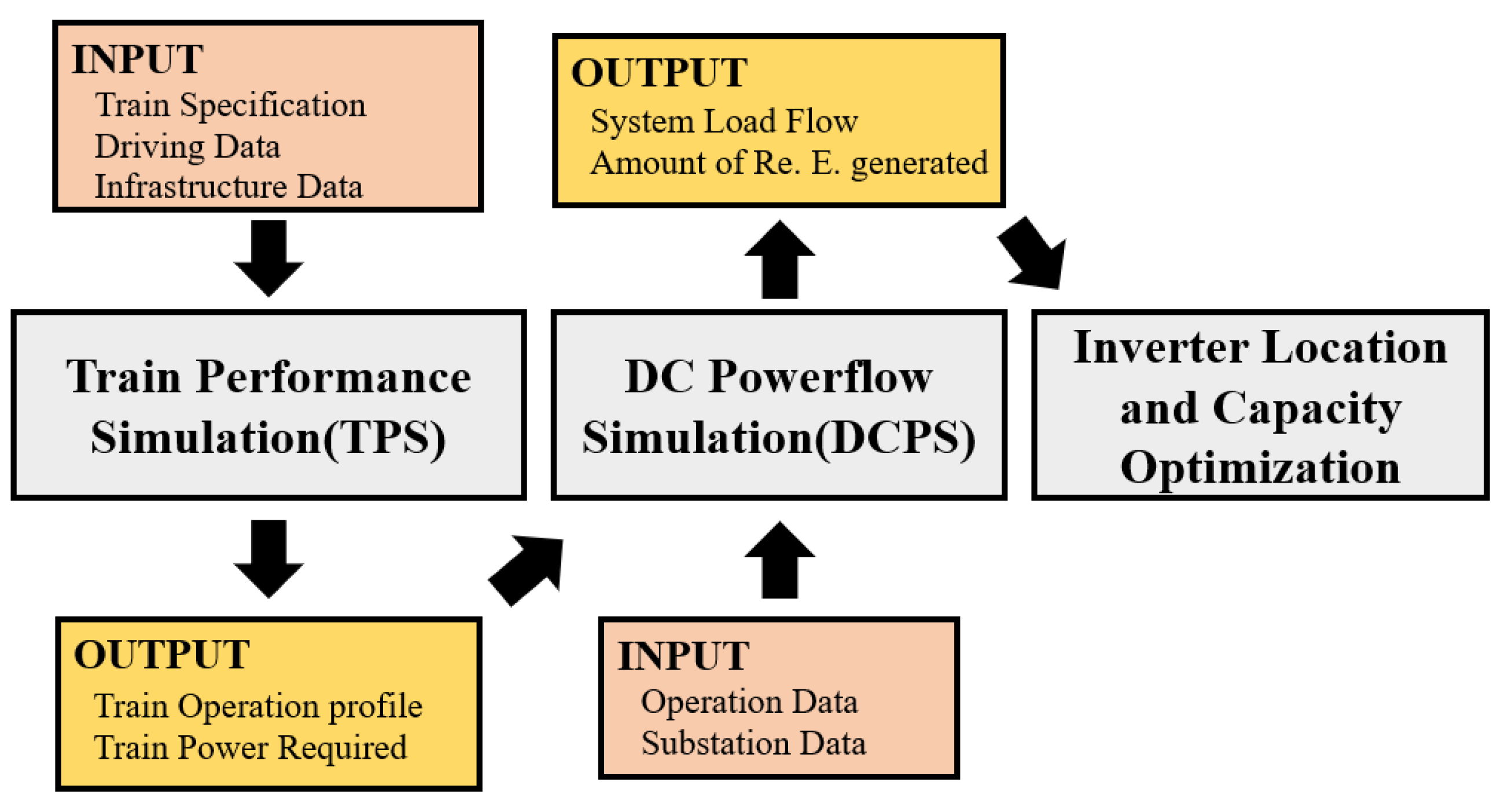
2.1. Overview of Inverter Installation and DC Power Simulation
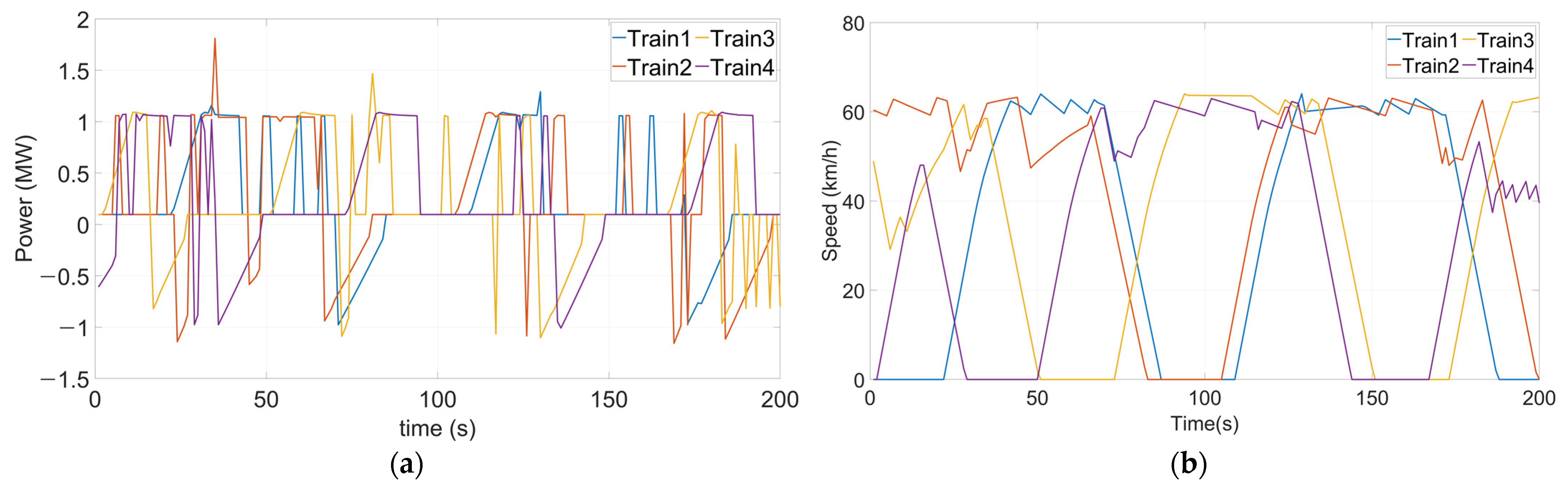
2.2. Train Performance Simulation
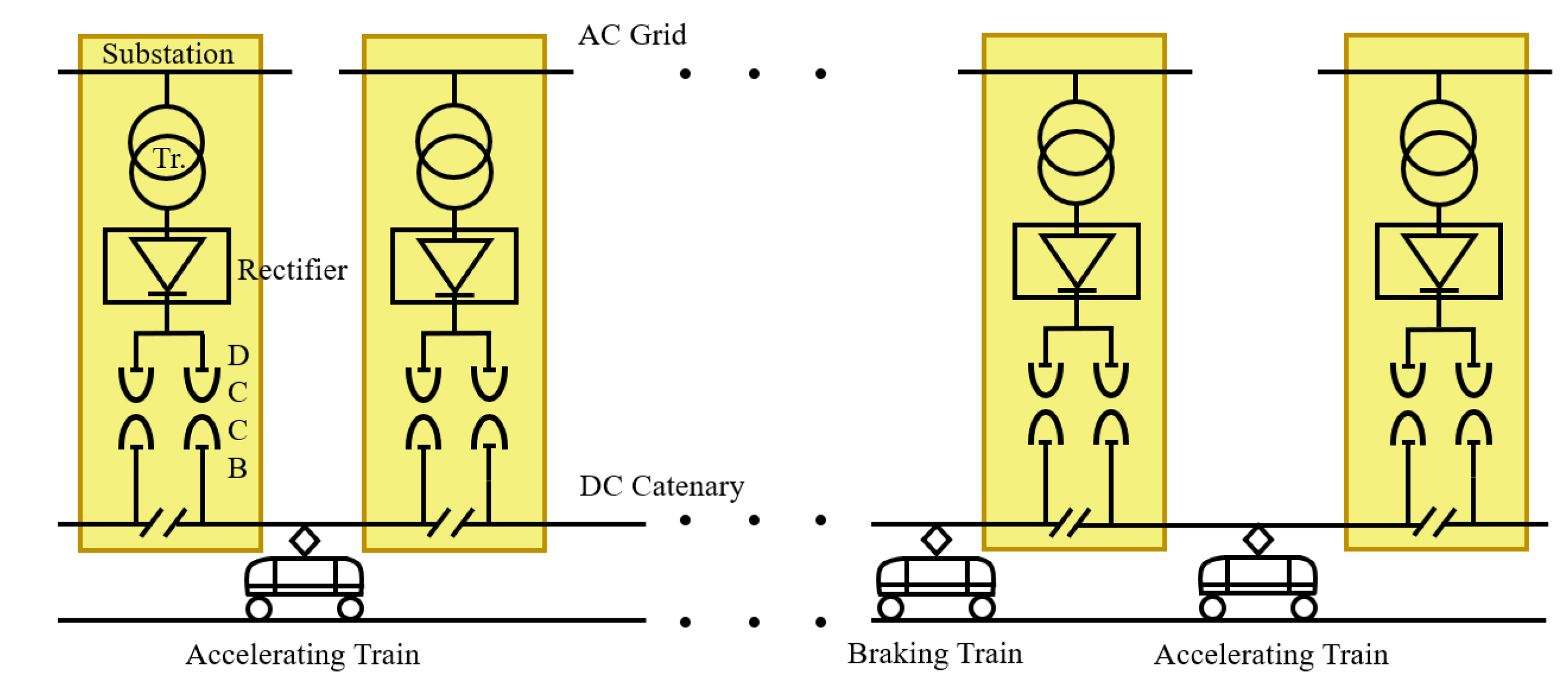
2.3. DC Power Simulation
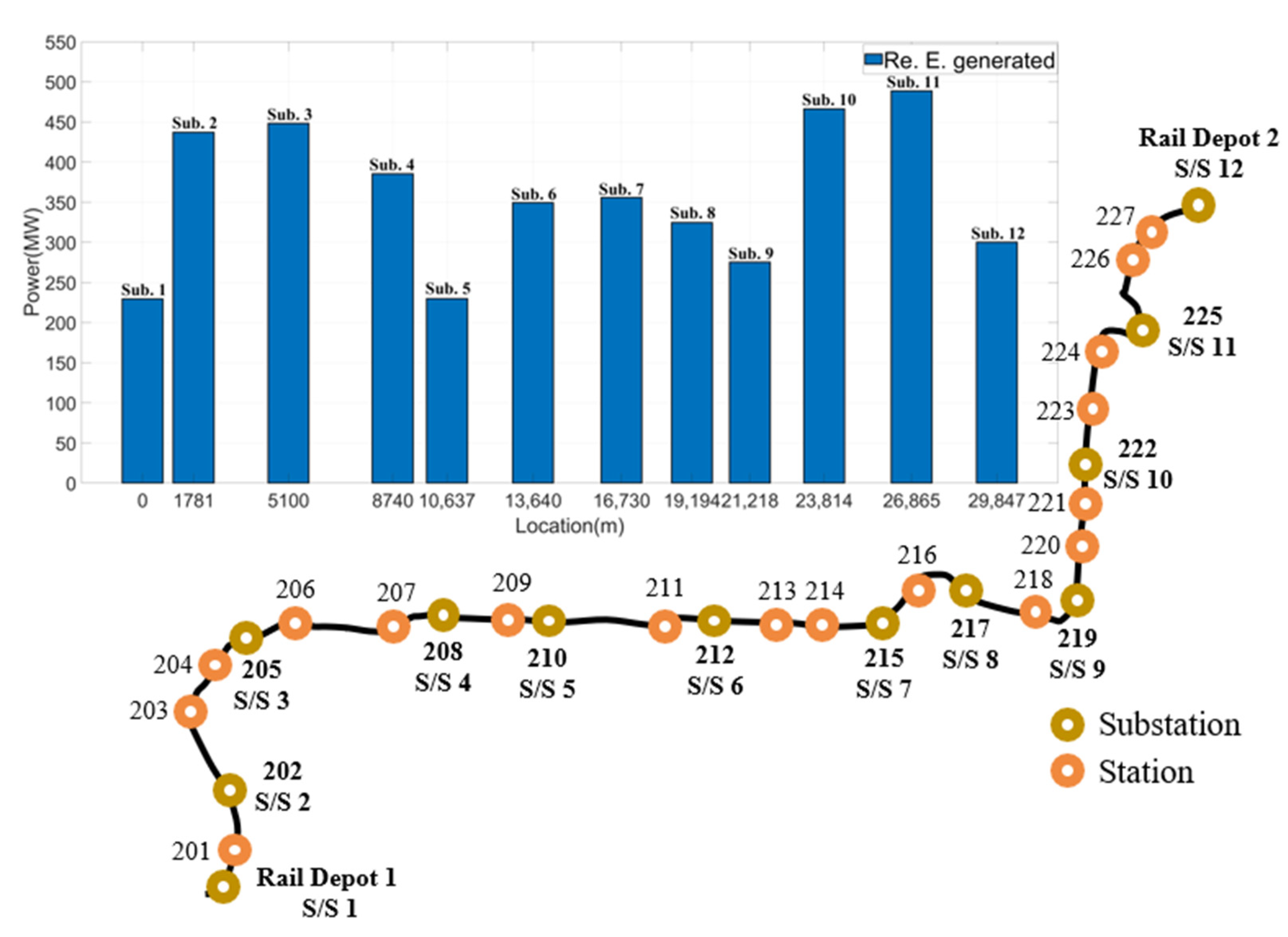
2.4. DCPS Based Inverter Location and Capacity Selection
3. Train Braking Time Based Inverter Control and Operation Method
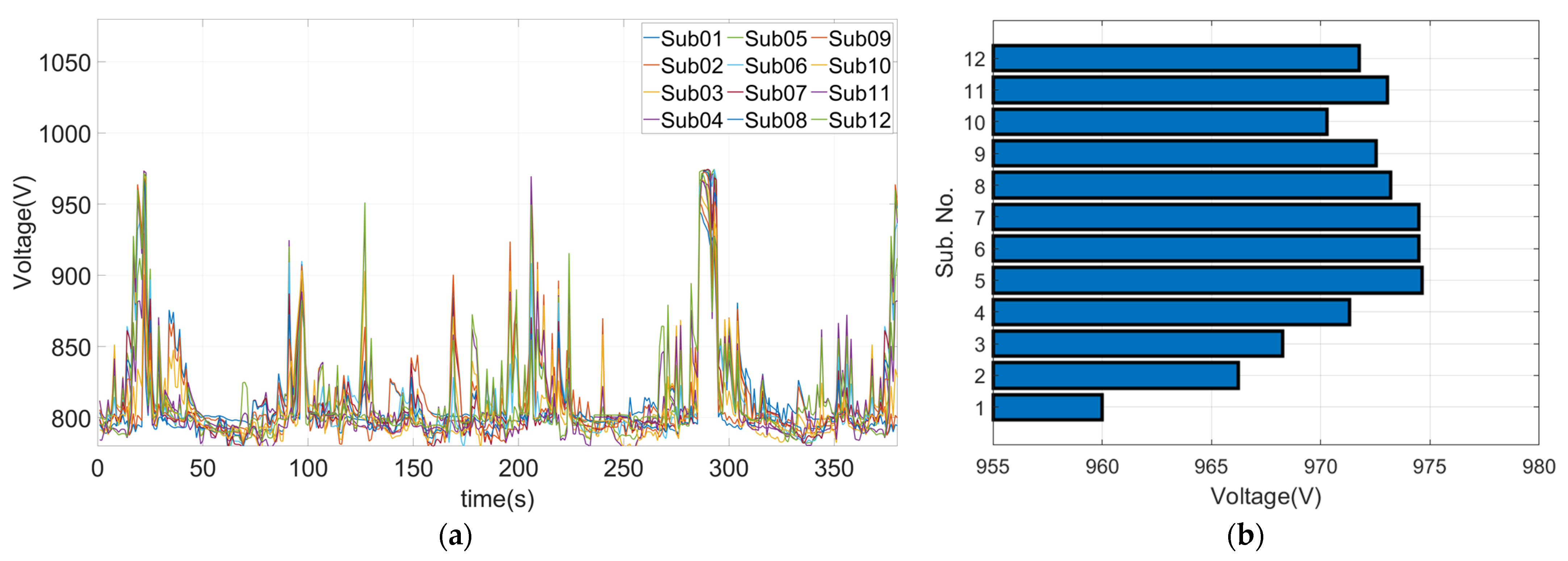
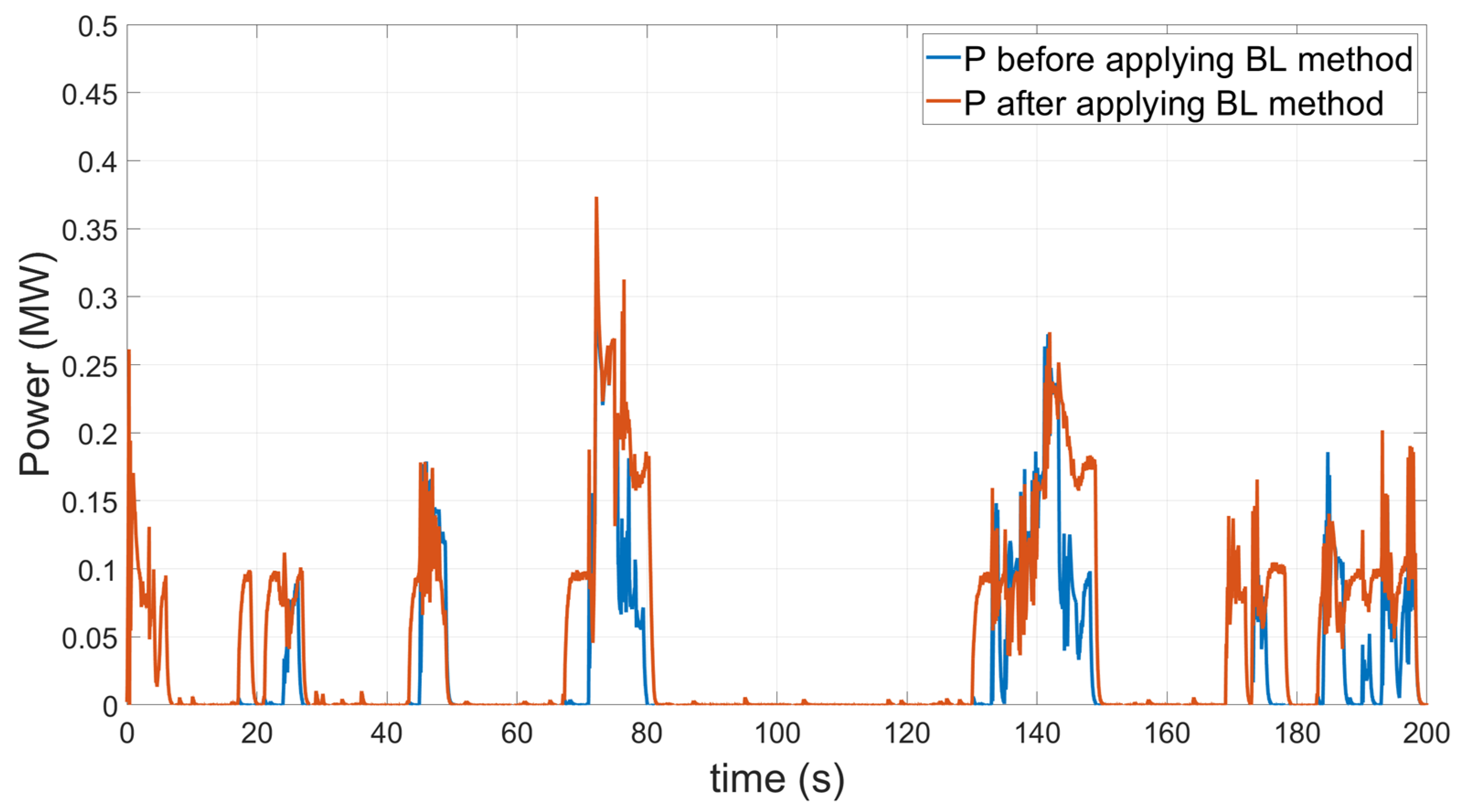
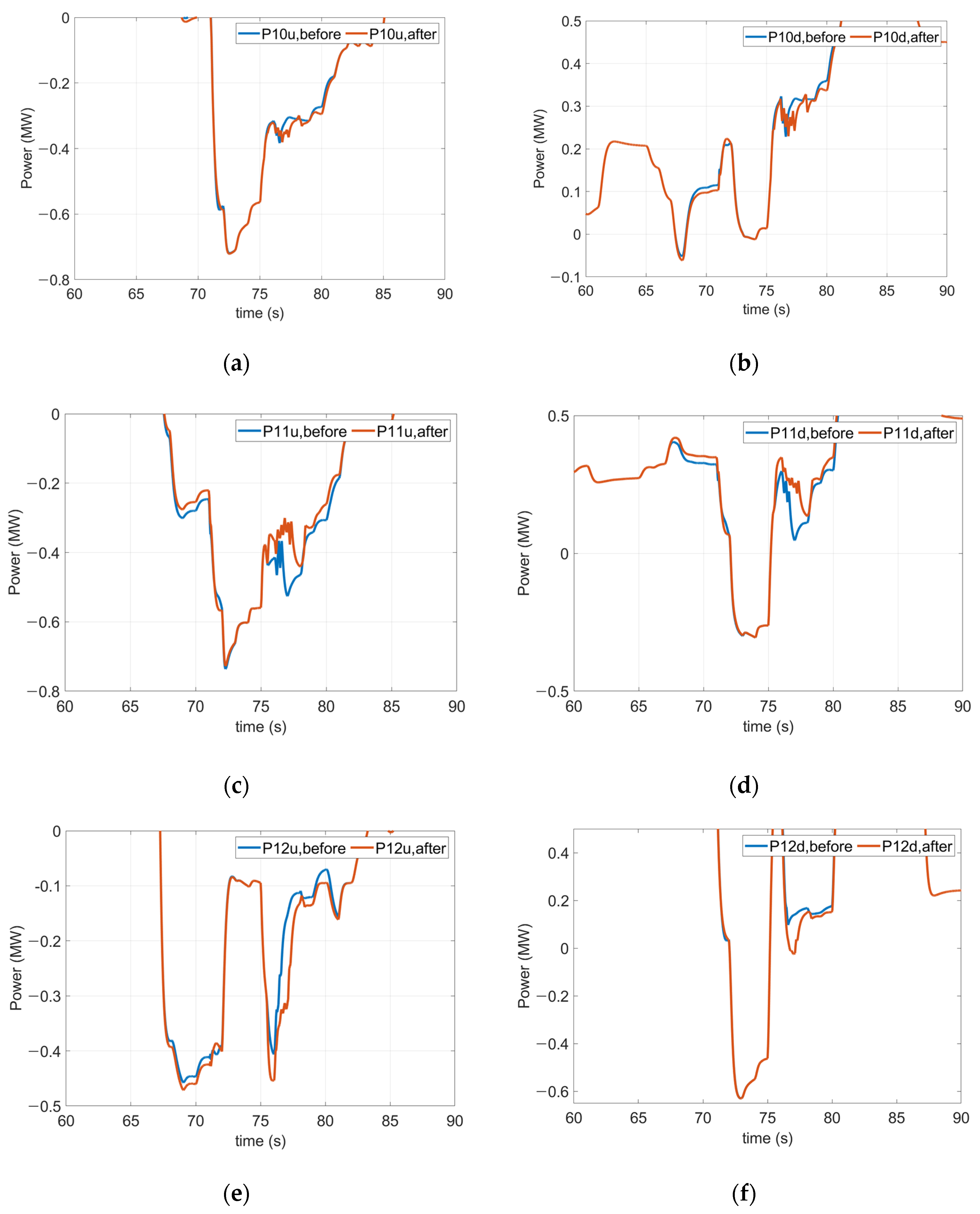
4. Simulation Analysis
5. Conclusions
- Optimal installation location and capacity calculation method of regenerative inverter using TPS and DCPS.
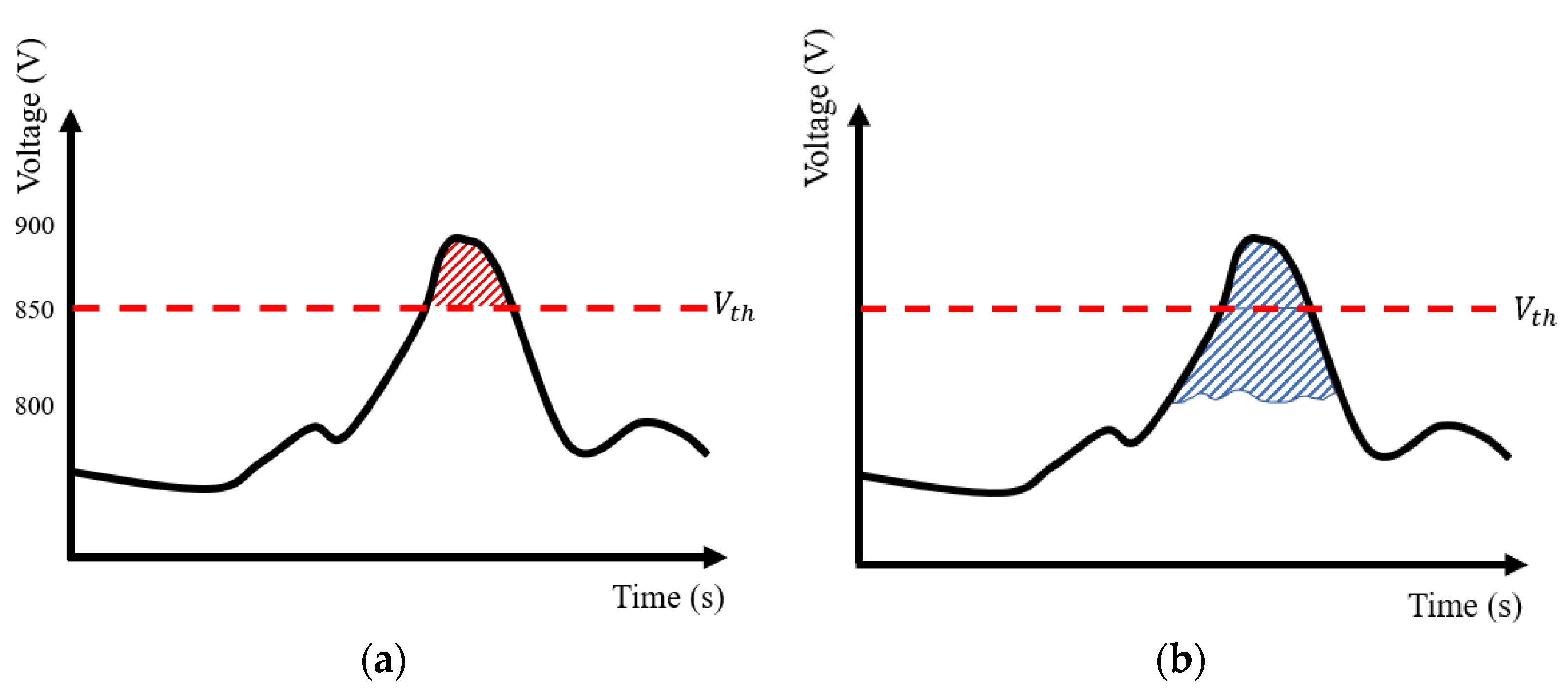
- Explanation of limitations of conventional inverter control method according to threshold voltage.
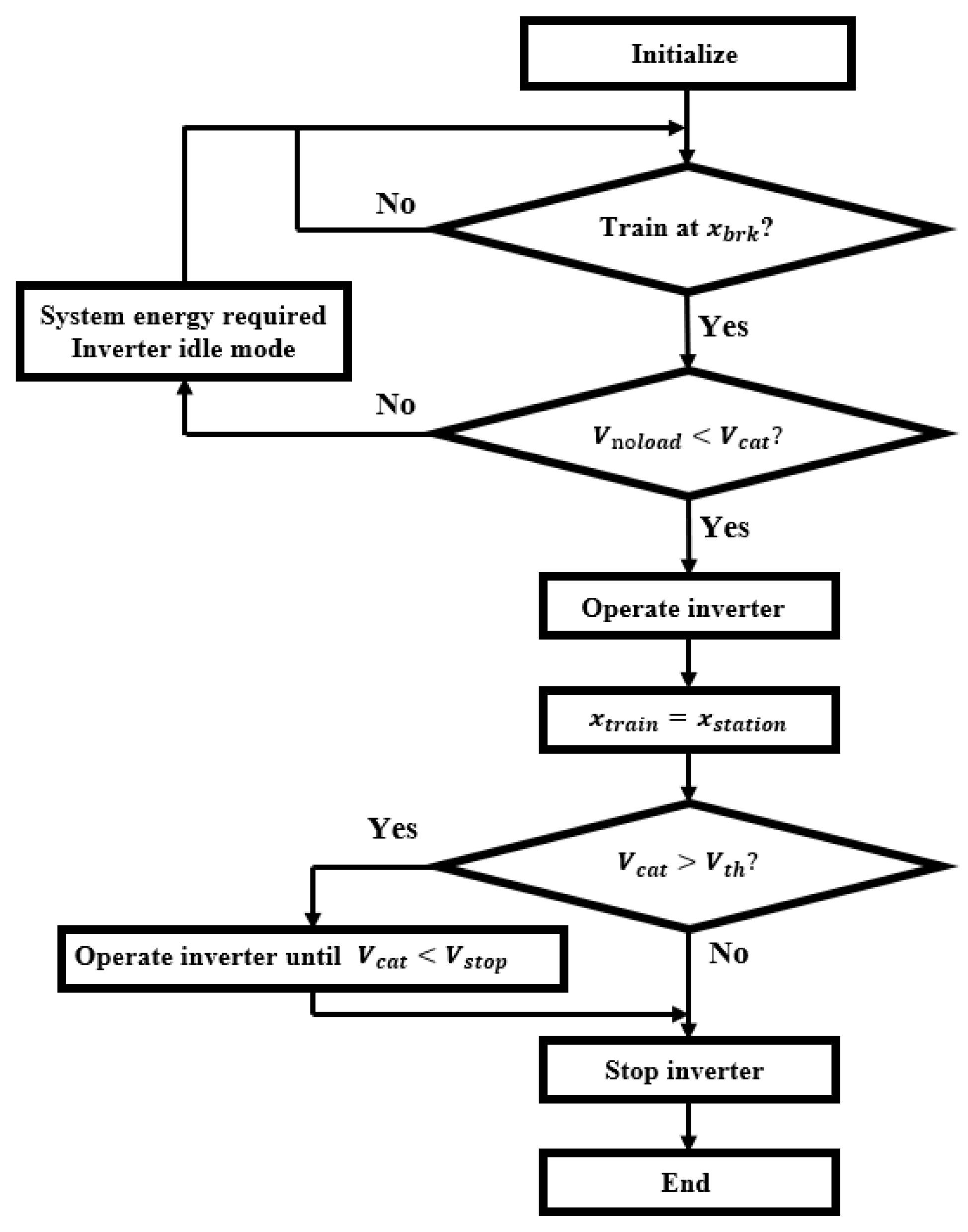
- Proposal of a plan to increase the utilization rate of regenerative energy using the braking position-based inverter operation method.
Author Contributions
Funding
Conflicts of Interest
References
- Kim, H.J.; Jung, H.; Ko, Y.J.; Chae, E.S.; Kim, H.J.; Hwang, I.S.; Heo, J.H.; Park, J.Y. Cooperative Operation Schedules of Energy Storage System and Demand Response Resources Considering Urban Railway Load Characteristic under a Time-of-Use Tariff. J. Electr. Eng. Technol. 2021, 16, 1273–1284. [Google Scholar] [CrossRef]
- Jung, H. An Optimal Charging and Discharging Scheduling Algorithm of Energy Storage System to Save Electricity Pricing Using Reinforcement Learning in Urban Railway System. J. Electr. Eng. Technol. 2022, 17, 727–735. [Google Scholar] [CrossRef]
- Lee, H.; Kim, J.; Lee, C.; Kim, J. Correction to: Novel Cooperative Controller Design of Heterogeneous Energy Storages for Economic Applications in Electric Railway Systems. J. Electr. Eng. Technol. 2020, 15, 979–987. [Google Scholar] [CrossRef]
- Sparavigna, L. Control Algorithms for the Optimization of Energy Storage Systems Management in Urban Transport Systems. Int. J. Appl. Eng. Res. 2018, 13, 6177–6182. [Google Scholar]
- Popescu, M.; Bitoleanu, A. A Review of the Energy Efficiency Improvement in DC Railway Systems. Energies 2019, 12, 1092. [Google Scholar] [CrossRef]
- Lin, S.; Huang, D.; Wang, A.; Huang, Y.; Zhao, L.; Luo, R.; Lu, G. Research on the Regeneration Braking Energy Feedback System of Urban Rail Transit. IEEE Trans. Veh. Technol. 2019, 68, 7329–7339. [Google Scholar] [CrossRef]
- Li, S.; Wu, S.; Xiang, S.; Zhang, Y.; Guerrero, J.M.; Vasquez, J.C. Research on Synchronverter-Based Regenerative Braking Energy Feedback System of Urban Rail Transit. Energies 2020, 13, 4418. [Google Scholar] [CrossRef]
- Meishner, F.; Sauer, D.U. Wayside energy recovery systems in DC urban railway grids. eTransportation 2019, 1, 100001. [Google Scholar] [CrossRef]
- Ghaviha, N.; Campillo, J.; Bohlin, M.; Dahlquist, E. Review of application of energy storage devices in railway transportation. Energy Procedia 2017, 105, 4561–4568. [Google Scholar] [CrossRef]
- Gee, A.M.; Dunn, R.W. Analysis of trackside flywheel energy storage in light rail systems. IEEE Trans. Veh. Technol. 2015, 64, 3858–3869. [Google Scholar] [CrossRef]
- Gonzalez-Gil, A.; Palacin, R.; Batty, P. Sustainable urban rail systems: Strategies and technologies for optimal management of regenerative braking energy. Energy Convers. Manag. 2013, 75, 374–388. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Tian, Z.; Tricoli, P.; Hillmansen, S.; Wang, Y.; Liu, Z. Inverter Operating Characteristics Optimization for DC Traction Power Supply Systems. IEEE Trans. Veh. Technol. 2019, 68, 3400–3410. [Google Scholar] [CrossRef]
- Włodzimierz, J.; Adam, S. The multi-criteria optimization method for implementation of a regenerative inverter in a 3kV DC traction system. Electr. Power Syst. Res. 2018, 161, 61–73. [Google Scholar]
- Mellitt, B.; Mouneimne, Z.S.; Goodman, C.J. Simulation study of DC transit systems with inverting substations. IEE Proc. B Electr. Power Appl. 1984, 131, 38–50. [Google Scholar] [CrossRef]
- Pereira, F.H.; Pires, C.L.; Nabeta, S.I. Optimal placement of rectifier substations on DC traction systems. IET Electr. Syst. Transp. 2014, 4, 62–69. [Google Scholar] [CrossRef]
- Milroy, I.P. Aspects of Automatic Train Control. Ph.D. Thesis, Loughborough University, Leicestershire, UK, 1980. [Google Scholar]
- Howlett, P.G. Optimal driving strategies for a train journey with speed limits. J. Aust. Math. Soc. 1994, 36, 38–49. [Google Scholar]
- Su, S.; Li, X.; Tang, T. A subway train timetable optimization approach based on energy-efficient operation strategy. IEEE Trans. Intell. Transp. Syst. 2013, 14, 883–893. [Google Scholar] [CrossRef]
- Lu, S.; Weston, P.; Hillmansen, S.; Gooi, H.B.; Roberts, C. Increasing the regenerative braking energy for railway vehicles. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2506–2515. [Google Scholar] [CrossRef]
- Yang, X.; Li, X.; Gao, Z.; Wang, H.; Tang, T. A cooperative scheduling model for timetable optimization in subway systems. IEEE Trans. Intell. Transp. Syst. 2013, 14, 438–447. [Google Scholar] [CrossRef]
- Cai, Y.; Irving, M.R.; Case, S.H. Iterative techniques for the solution of complex DC-rail-traction systems including regenerative braking. IEEE Proc.-Gener. Transm. Distrib. 1995, 142, 445–452. [Google Scholar] [CrossRef]
- Lee, H.S. Development of a Novel Powerflow Algorithm for Energy Storage Optimization in DC Electric Railway Systems. Ph.D. Thesis, Korea University, Seoul, Korea, 2010. [Google Scholar]
- Rochard, B.P.; Schmid, F. A review of methods to measure and calculate train resistances. Proc. Inst. Mech. Eng. 2000, 214, 185–199. [Google Scholar] [CrossRef]
- Tian, Z.; Weston, P.; Zhao, N.; Hillmansen, S.; Roberts, C.; Chen, L. System energy optimisation strategies for metros with regeneration. Transp. Res. Part C Emerg. Technol. 2017, 75, 120–135. [Google Scholar] [CrossRef]
- Chung, S.G.; Lee, S.J. The computer algorithm for DC traction power supply system analysis including regenerative braking vehicles. Trans. Korean Inst. Electr. Eng. 2003, 52, 639–646. [Google Scholar]
- Bae, C.H. A simulation study of installation locations and capacity of regenerative absorption inverters in DC1500V electric railways system. Simul. Model. Pract. Theory 2009, 17, 829–838. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameters | Values |
|---|---|
| Headway [s] | 360 |
| Dwell time [s] | 20 |
| Train mass [ton] | 75.78 |
| Auxiliary power of train [kW] | 96 |
| No-load voltage [V] | 804 |
| Motion resistance [kN] | 18.2966 + 1.2666 + 0.09462 |
| Maximum train speed [km/h] | 80 |
| Train speed width [km/s] | 5 |
| Simulation time [s] | 3600 |
| Simulation Parameters | Values |
|---|---|
| Inverter threshold voltage [V] | 850 |
| Inverter stopping voltage [V] | 820 |
| Power supply side resistance [mΩ] | 1.841 |
| Rectifier resistance [mΩ] | 13.5 |
| Catenary resistance per unit length [mΩ]/km | 6.8 |
| Rail resistance per unit length [mΩ]/km | 7.65 |
| Simulation time [s] | 200 |
| Power Used by Inverter before BL Application [MW] | Power Used by Inverter after BL Application [MW] |
|---|---|
| 1808.038 | 2940.129 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yun, C.-M.; Cho, G.-J.; Kim, H.; Jung, H. A Study on the Train Brake Position-Based Control Method for Regenerative Inverters. Energies 2022, 15, 6572. https://doi.org/10.3390/en15186572
Yun C-M, Cho G-J, Kim H, Jung H. A Study on the Train Brake Position-Based Control Method for Regenerative Inverters. Energies. 2022; 15(18):6572. https://doi.org/10.3390/en15186572
Chicago/Turabian StyleYun, Chi-Myeong, Gyu-Jung Cho, Hyungchul Kim, and Hosung Jung. 2022. "A Study on the Train Brake Position-Based Control Method for Regenerative Inverters" Energies 15, no. 18: 6572. https://doi.org/10.3390/en15186572