
Dynamic Stability Study of Grid-Connected Inverter Based on Virtual Synchronizer under Weak Grid


Abstract
:1. Introduction
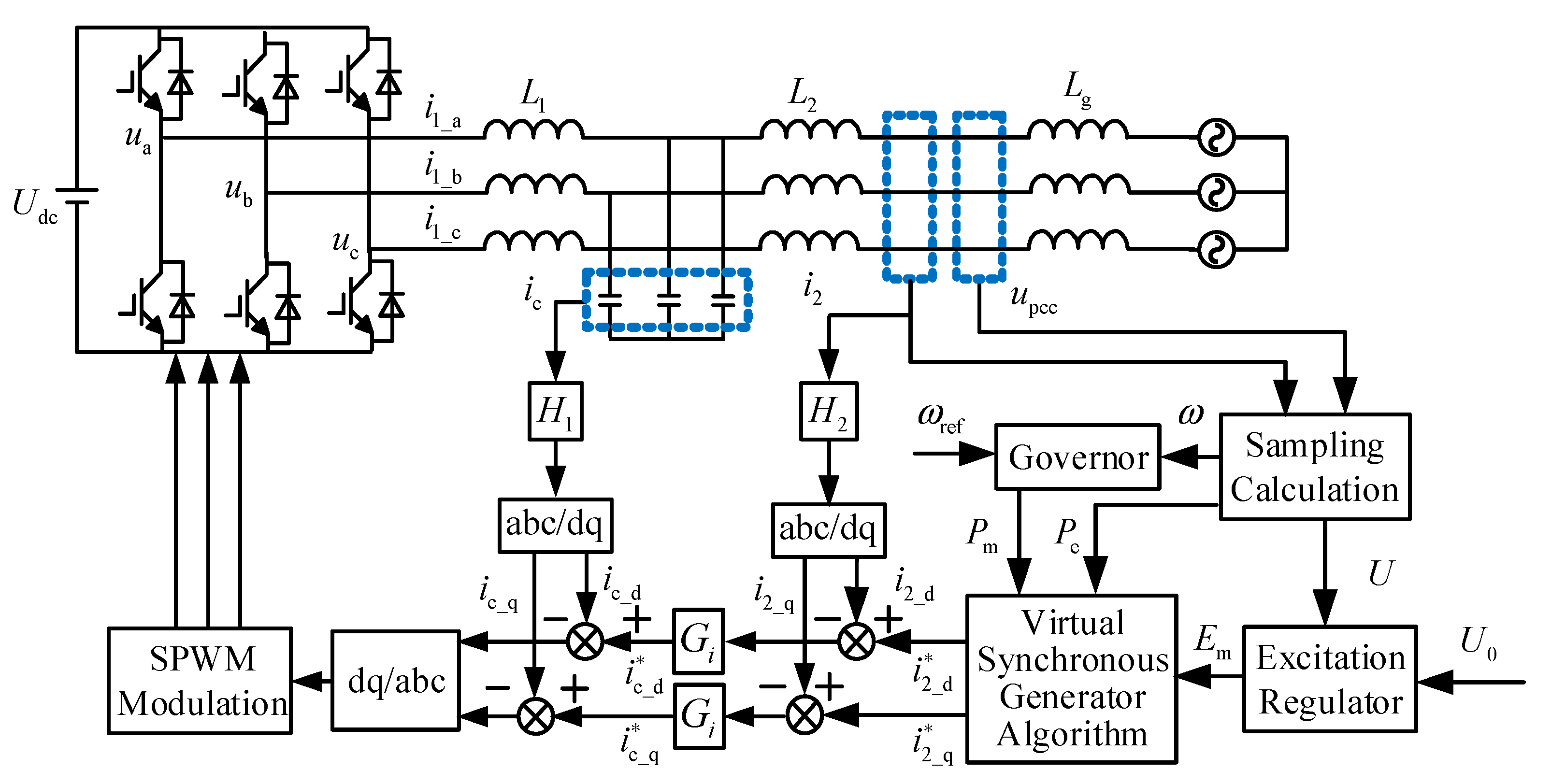
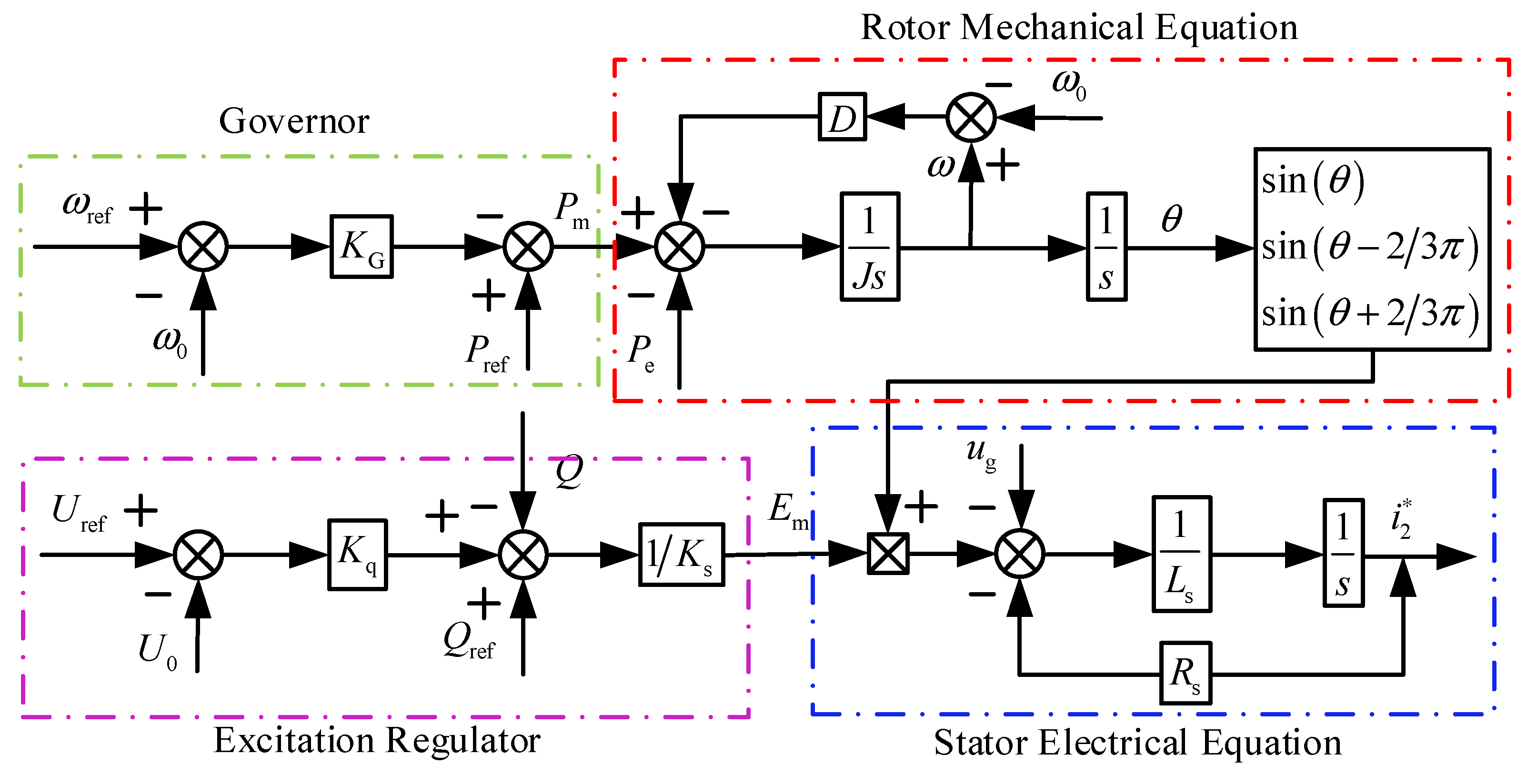
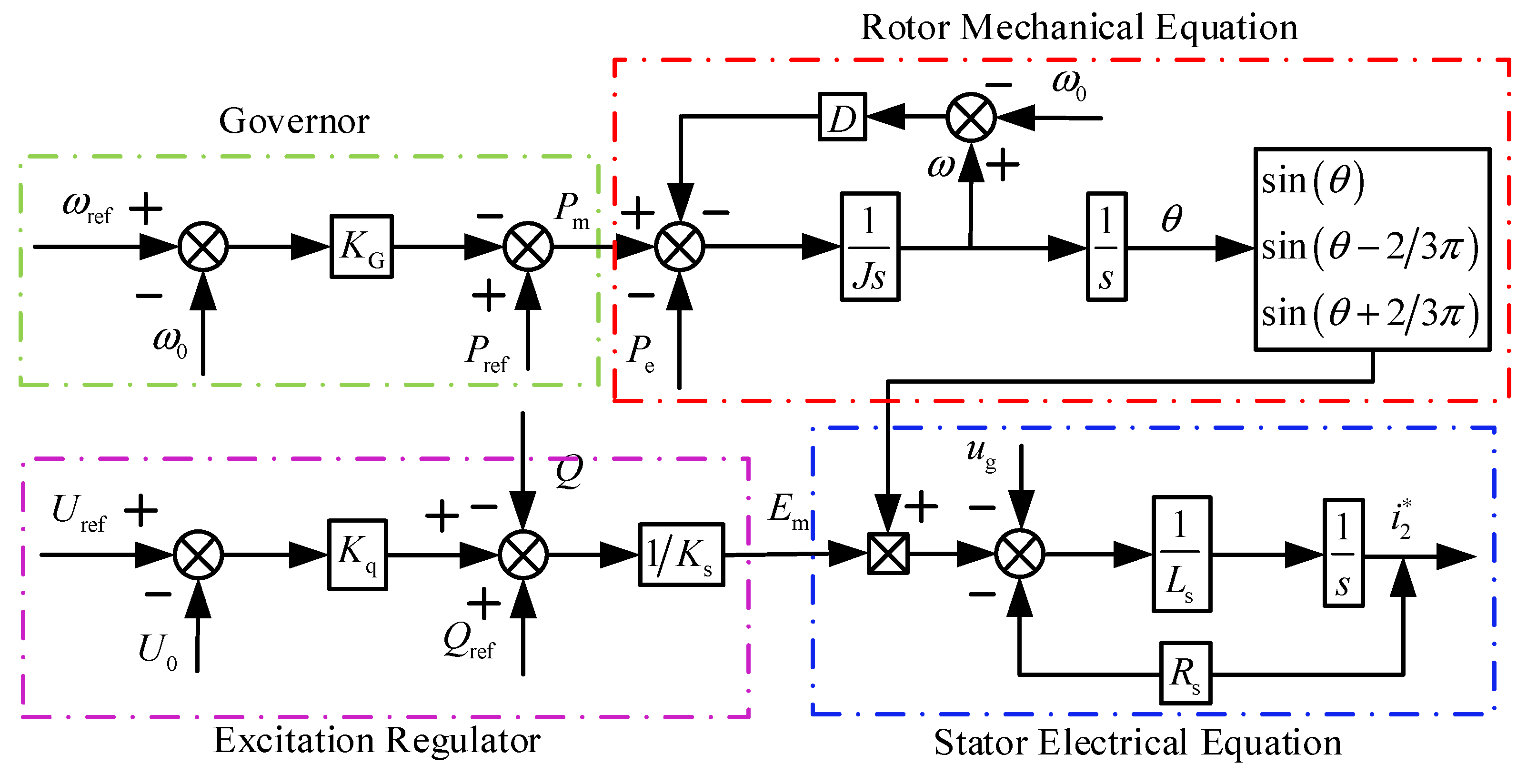
2. Basic Control Principle of Virtual Synchronous Generator
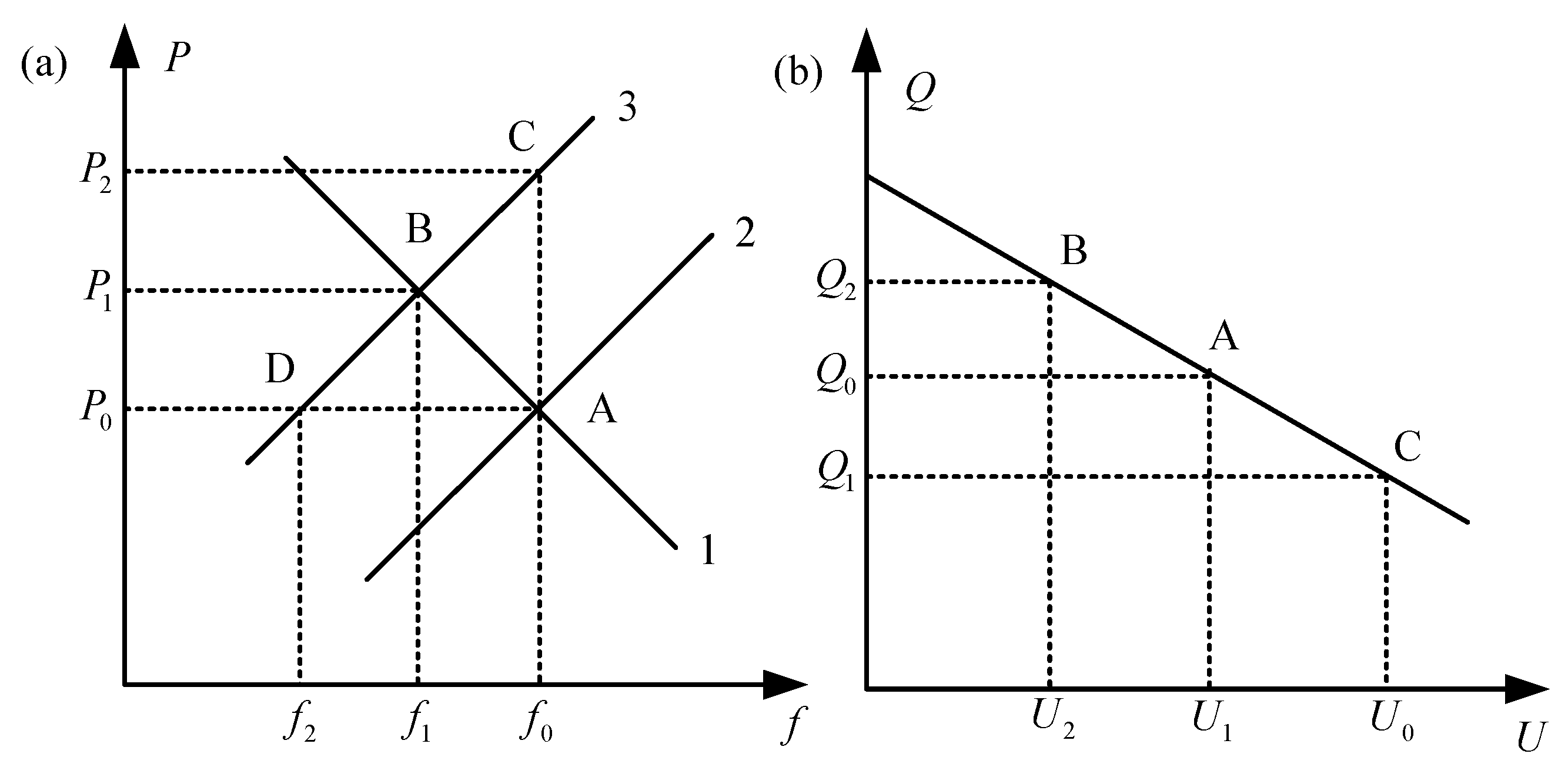
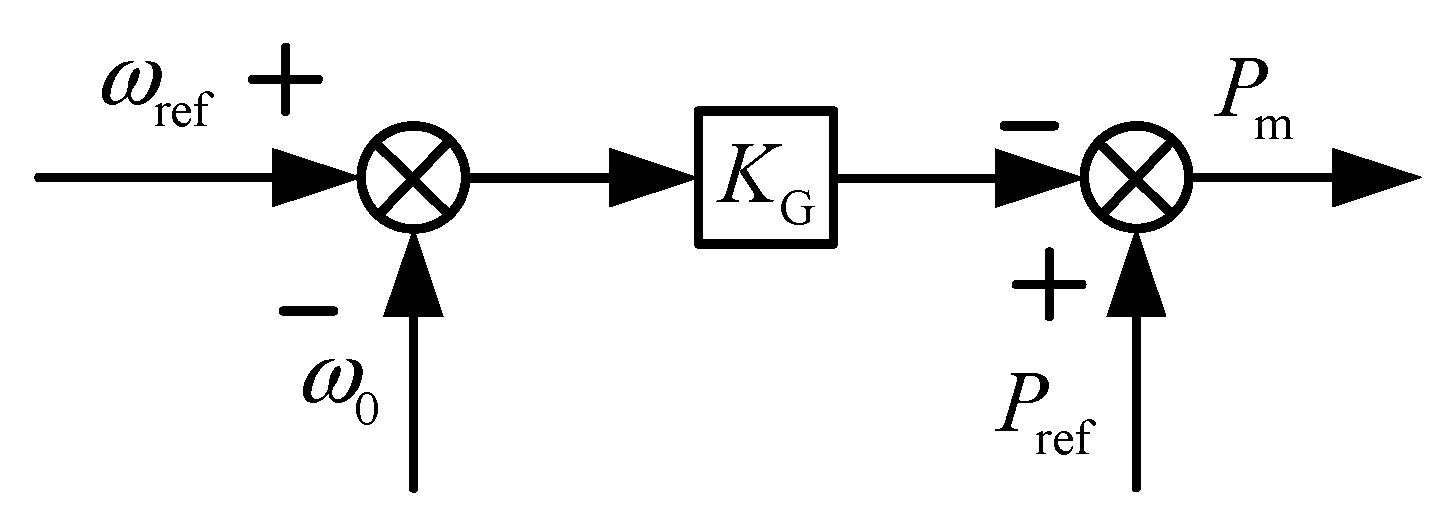
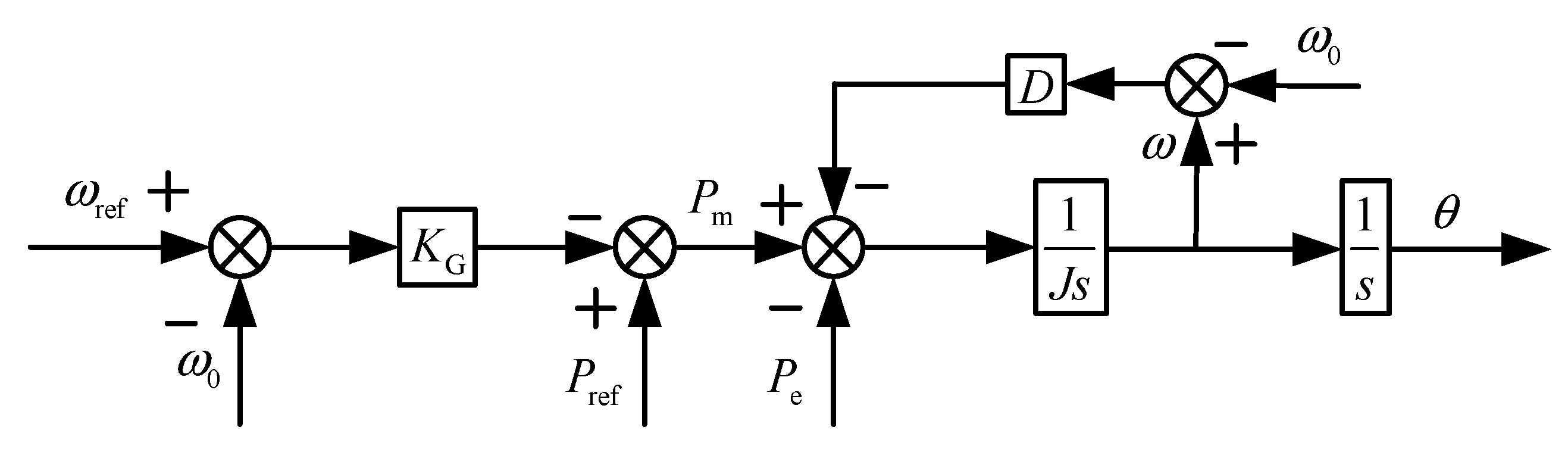
2.1. Active Power–Frequency Control Design
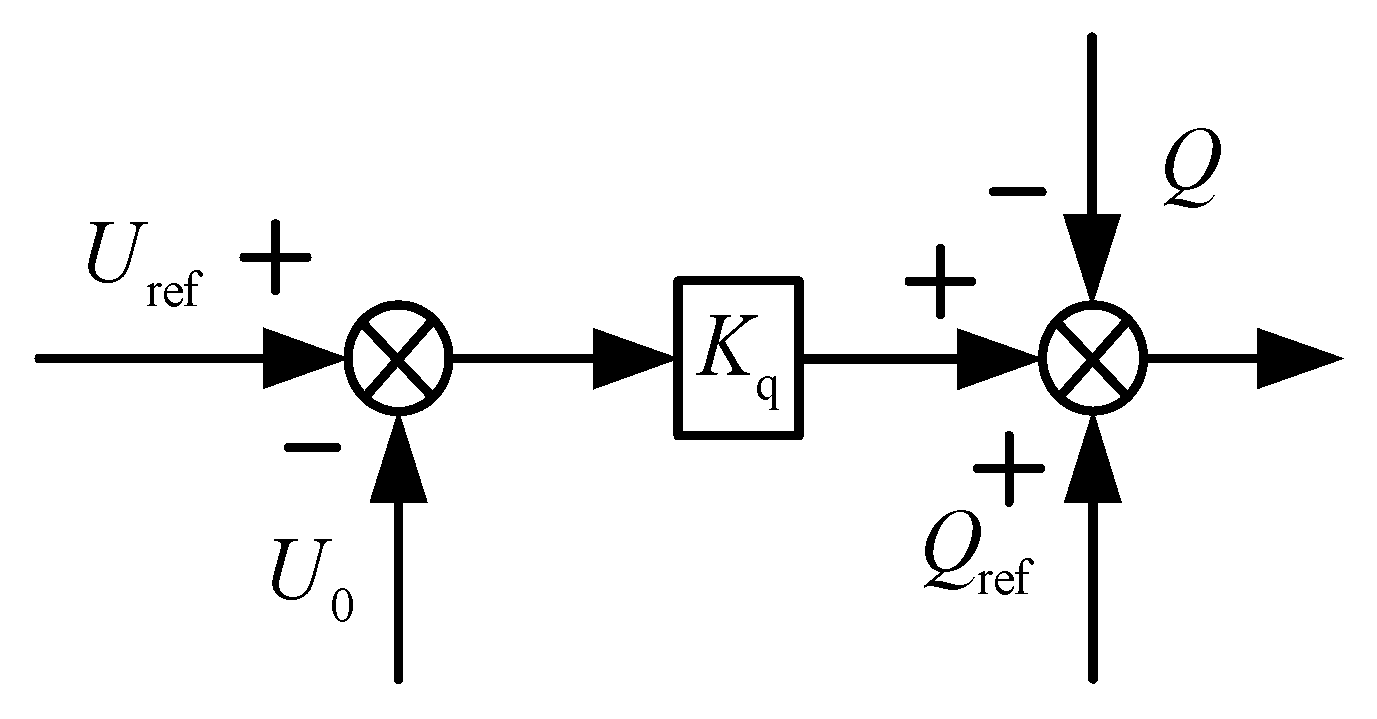
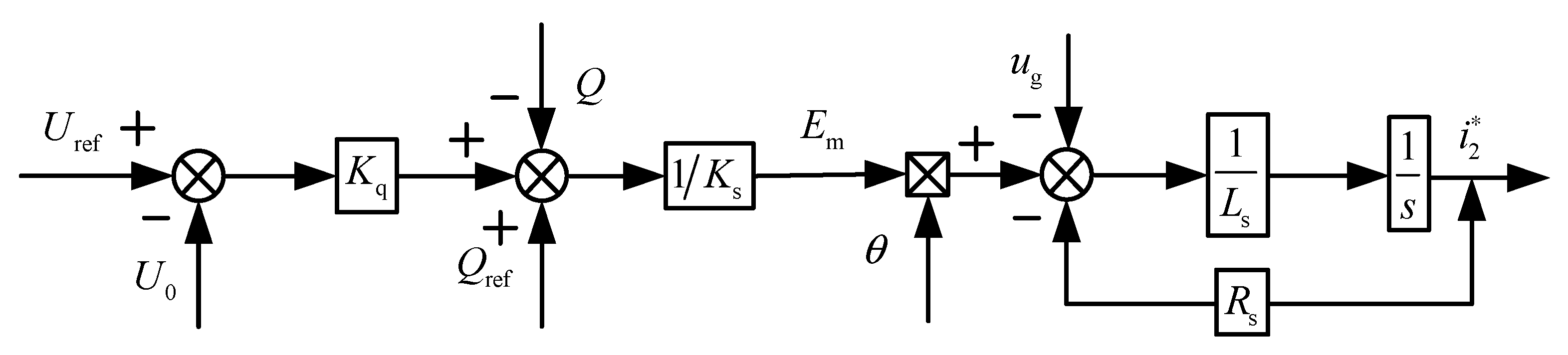
2.2. Reactive Power–Voltage Control Design
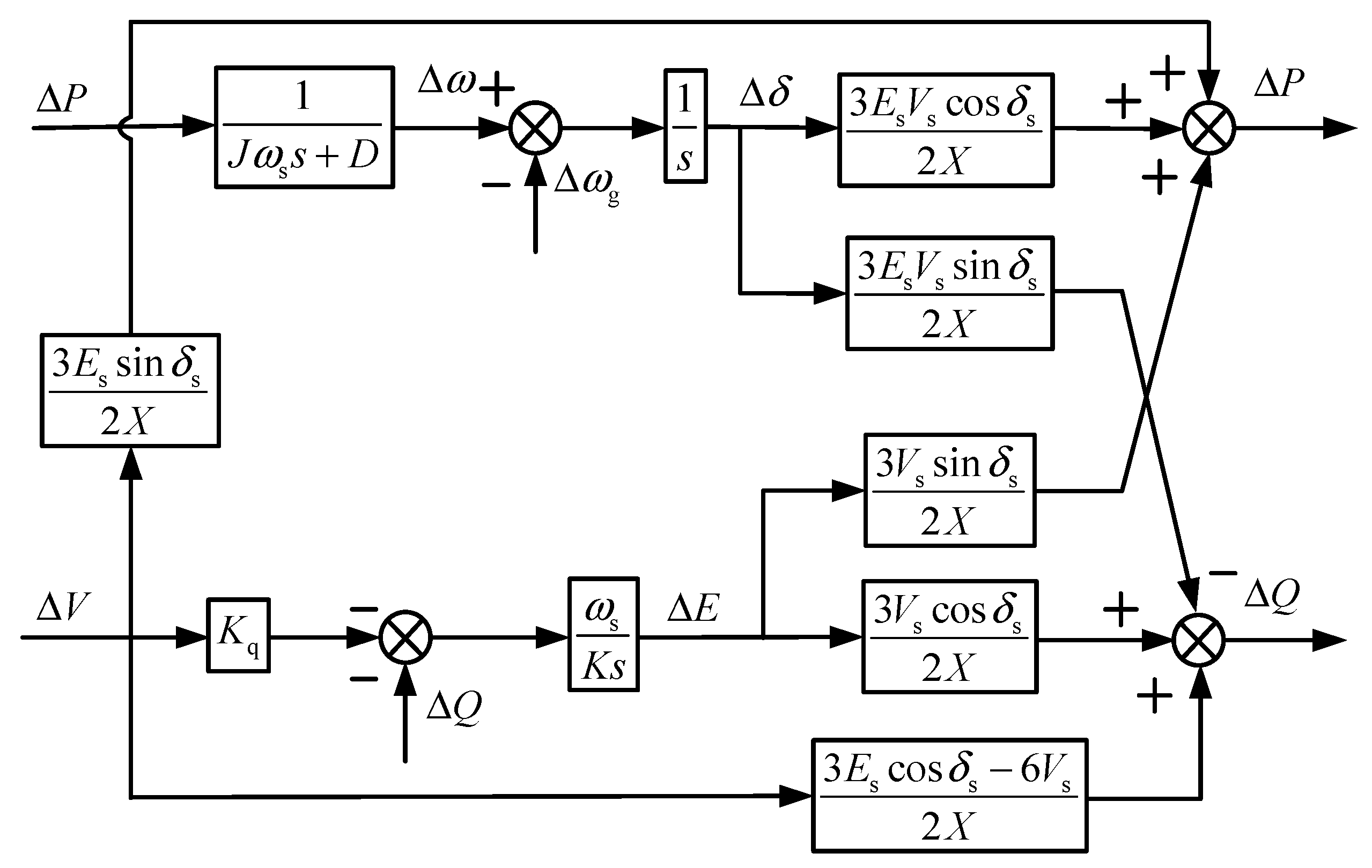
3. Small-Signal Modeling Analysis and Parameter Optimization Design of Virtual Synchronizer
3.1. Modeling Analysis of Virtual Synchronizer Response to Grid Frequency Fluctuations
3.2. Modeling Analysis of Response to Active Power Command Fluctuation
4. Simulation and Experimental Verification
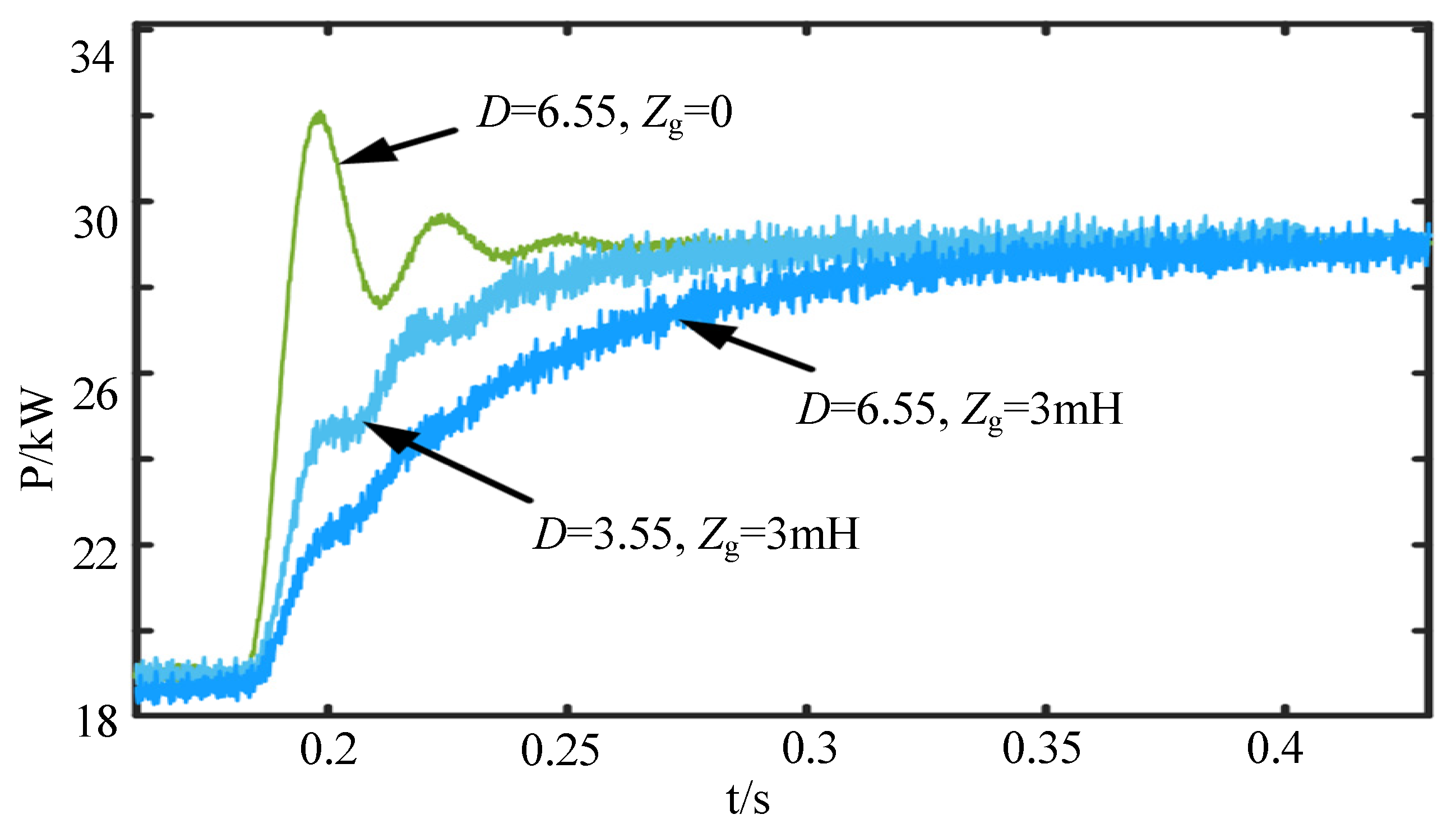
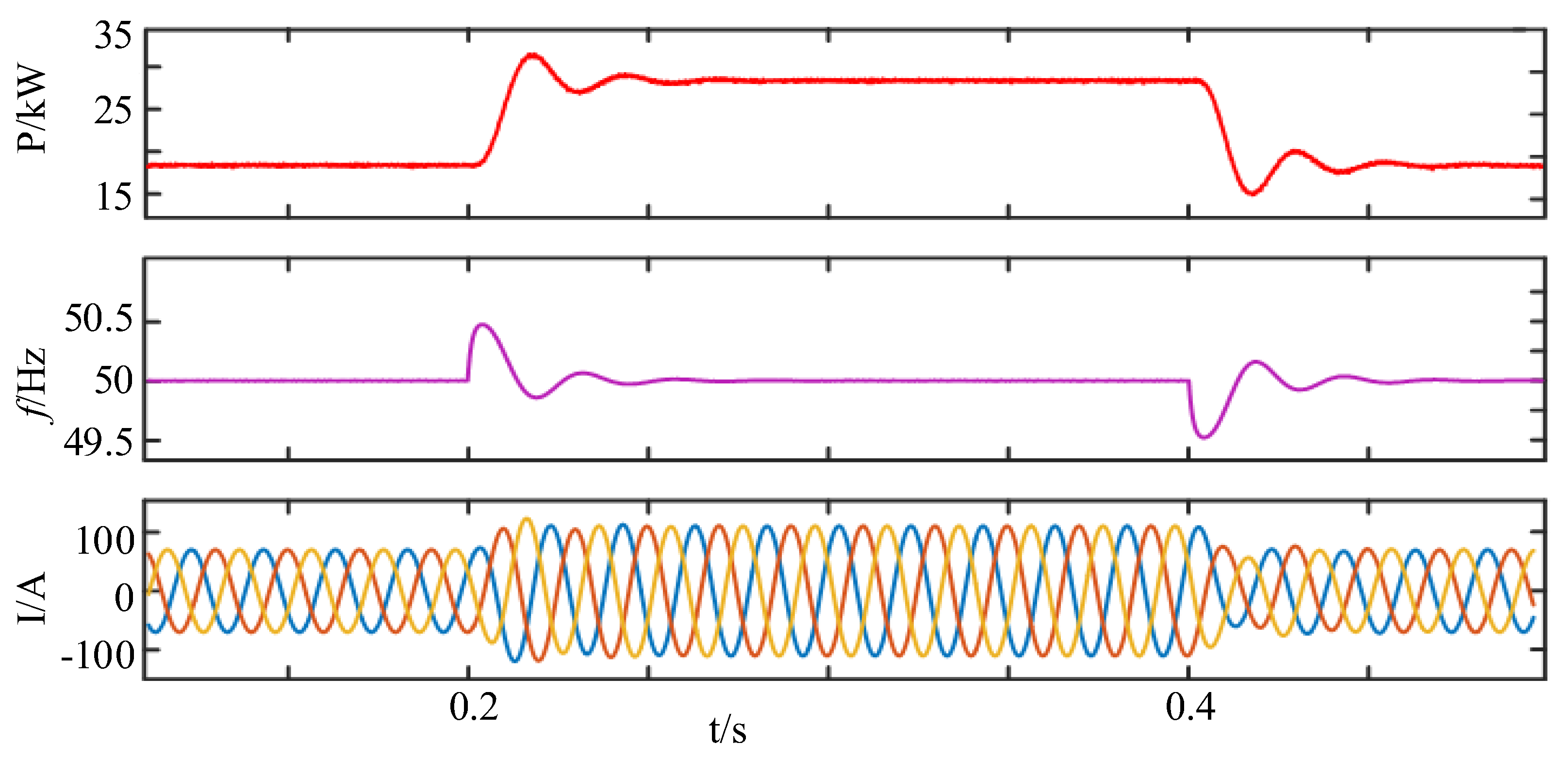
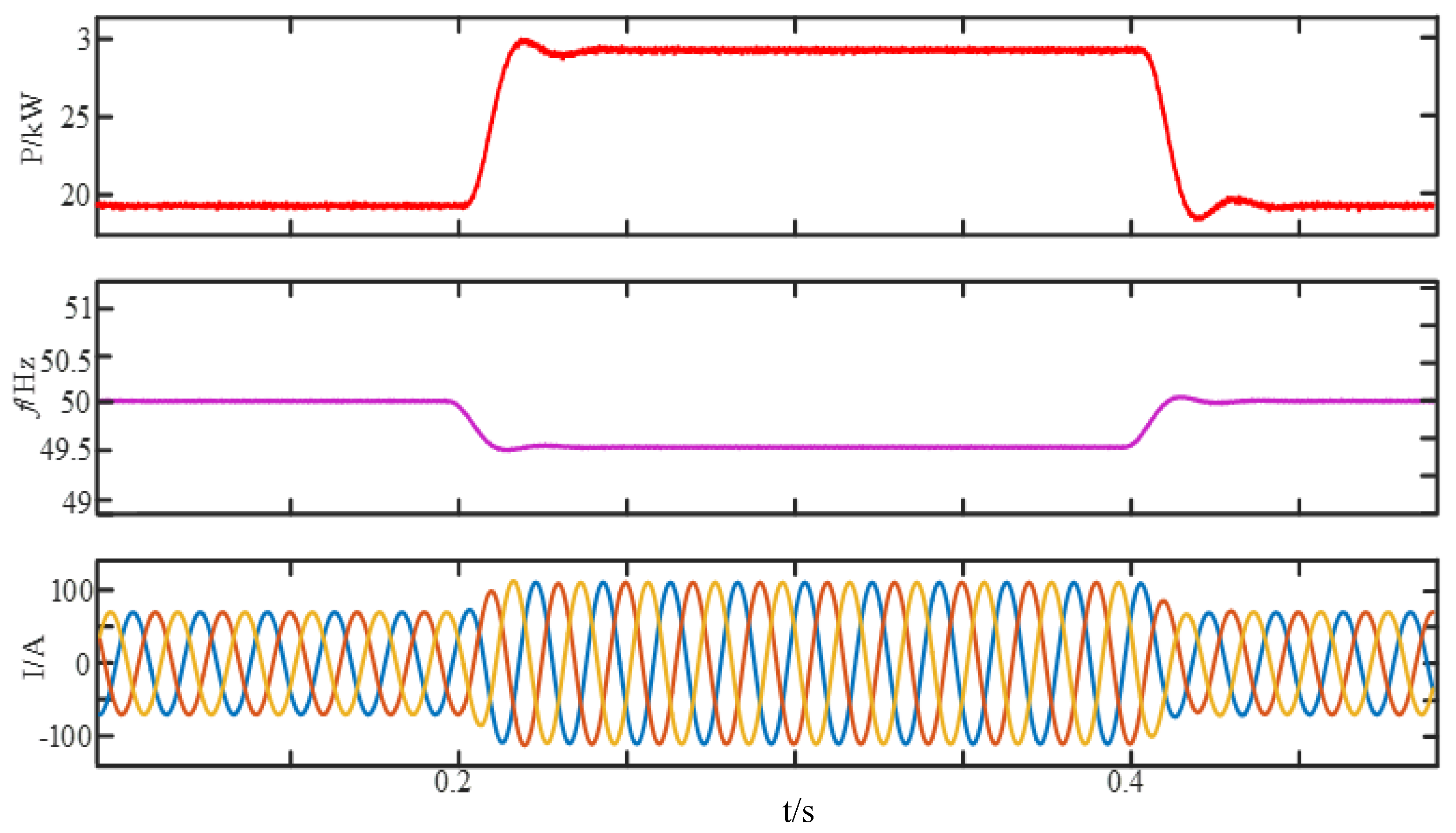
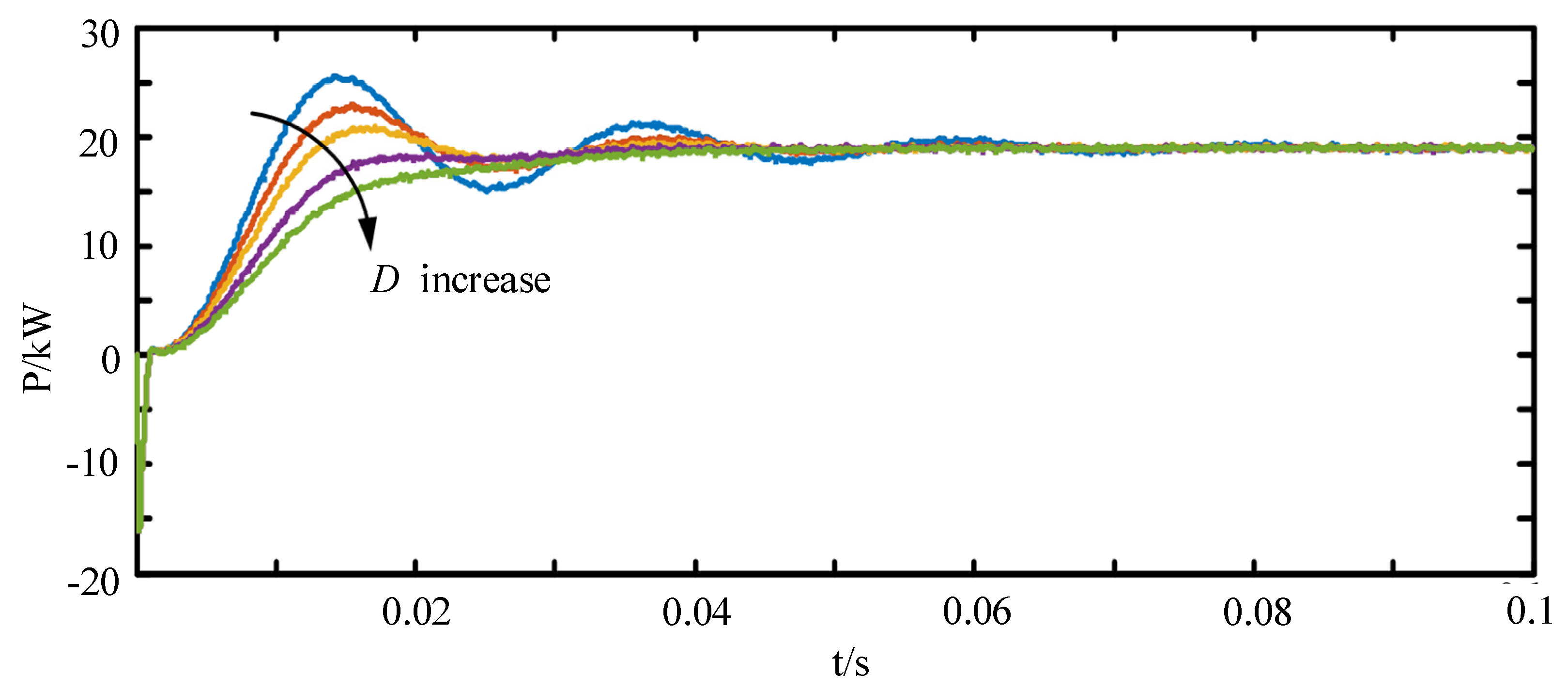
4.1. Simulation Verification
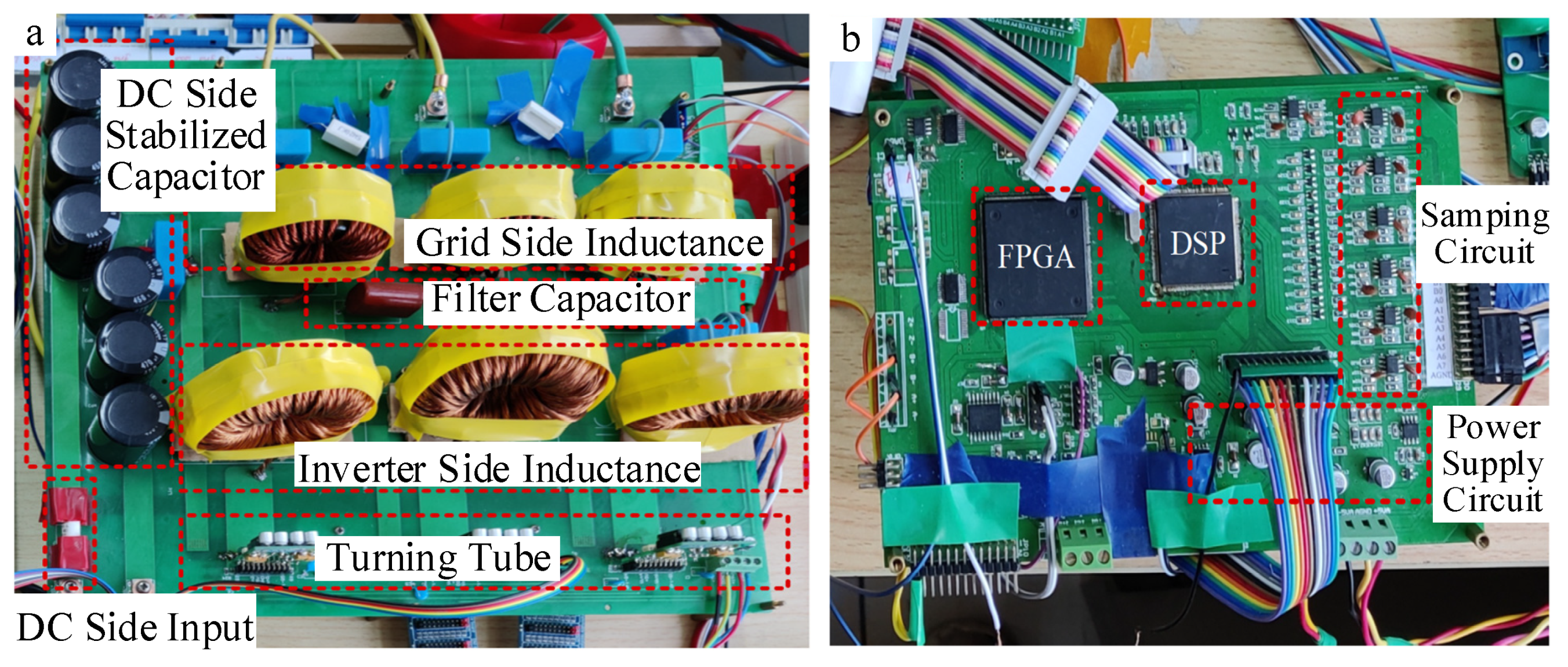
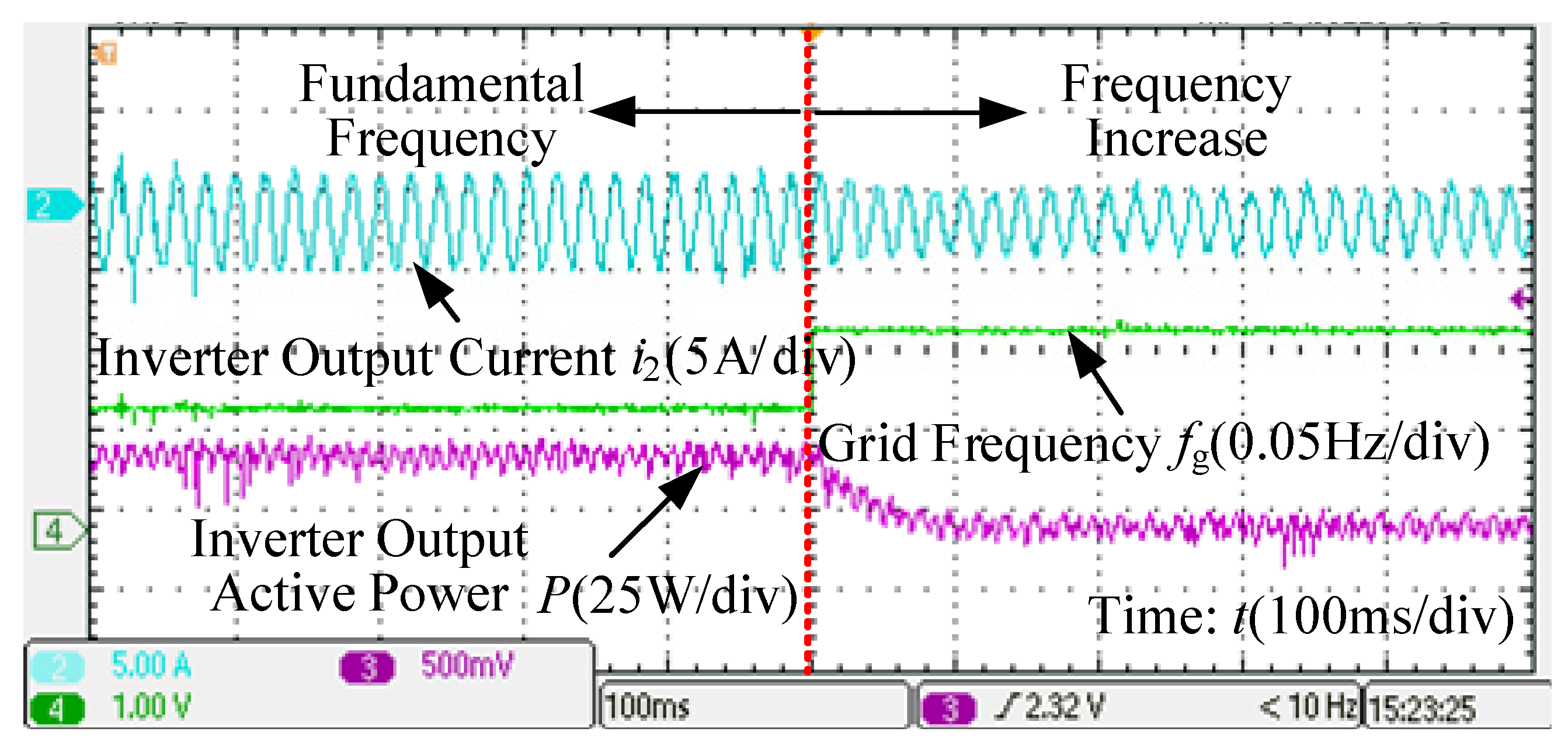
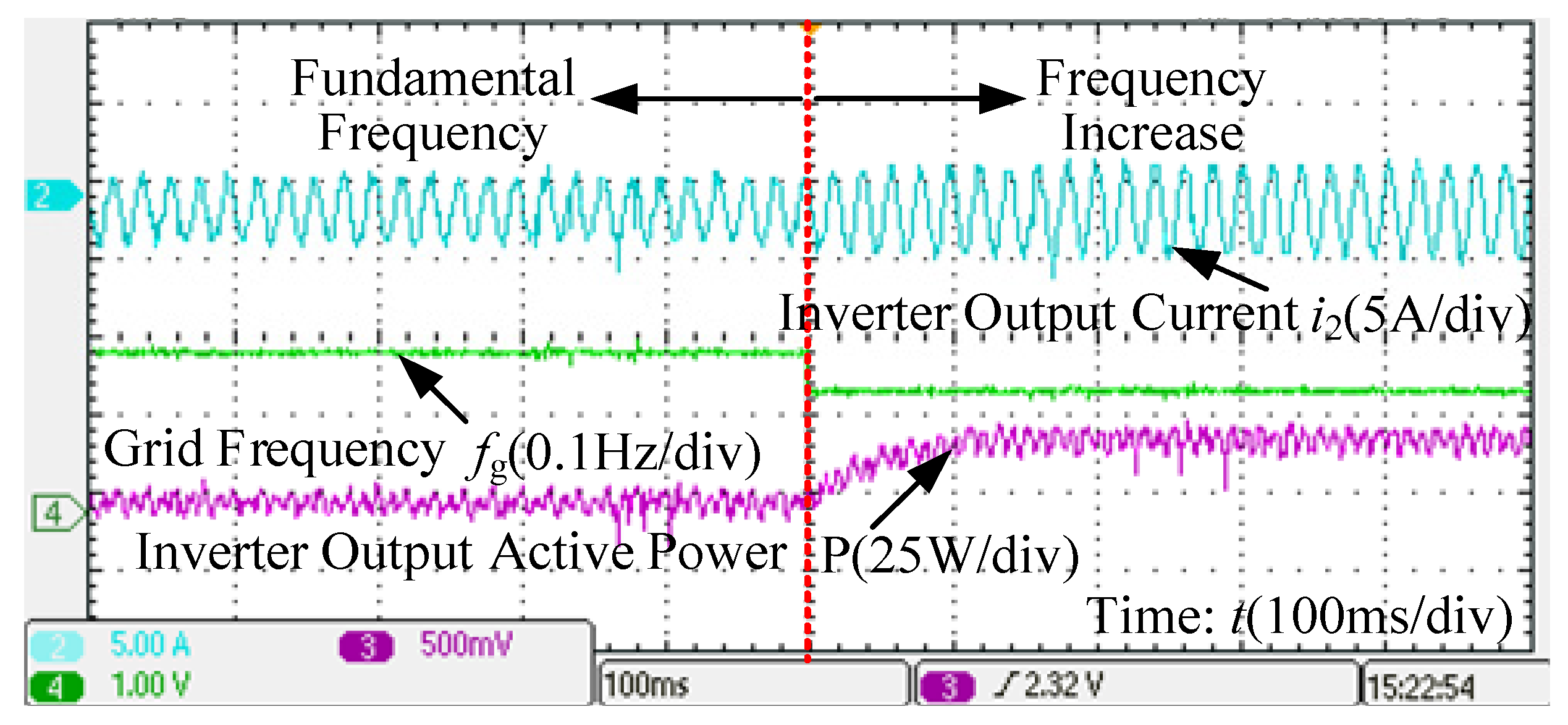
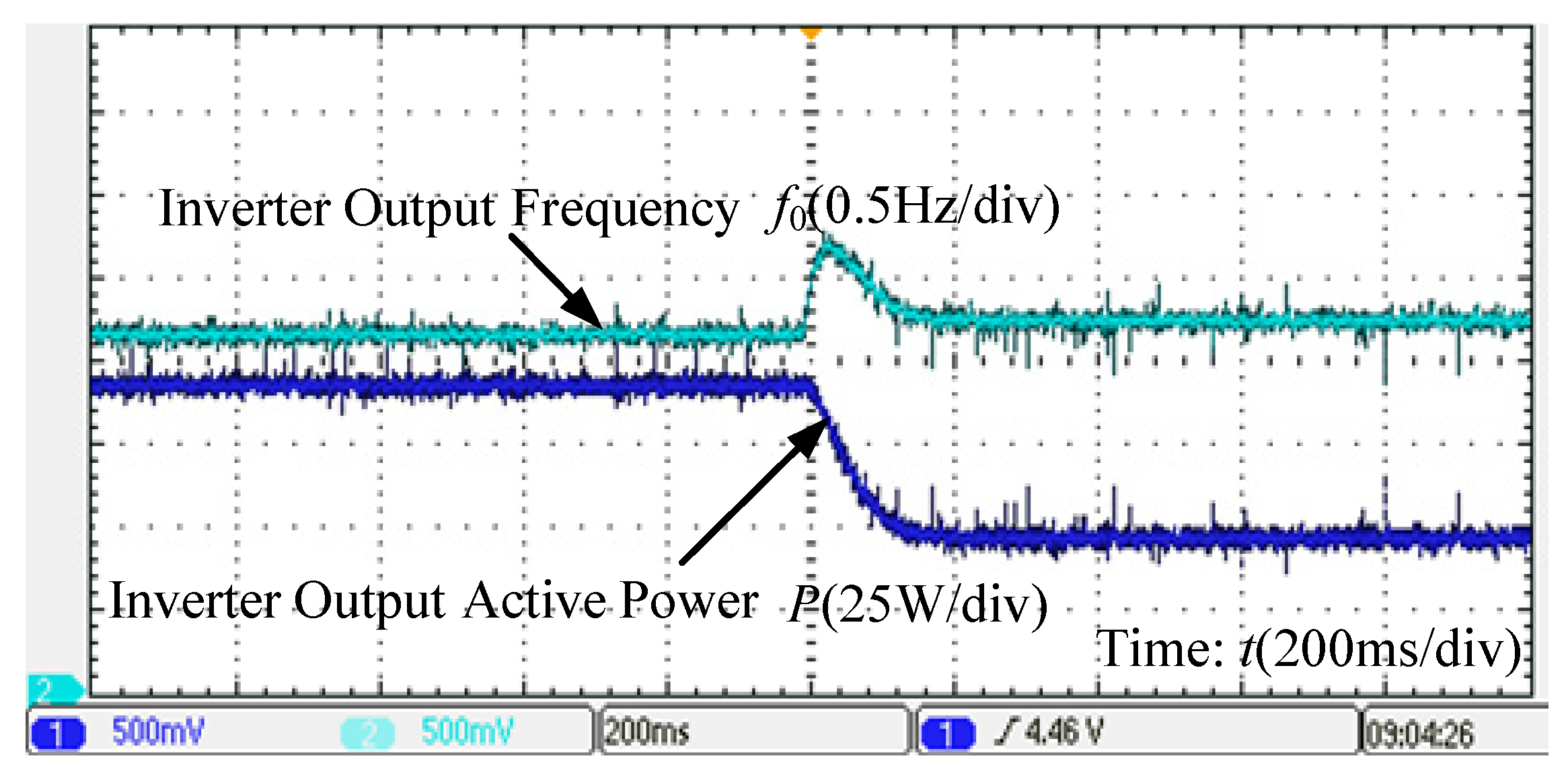
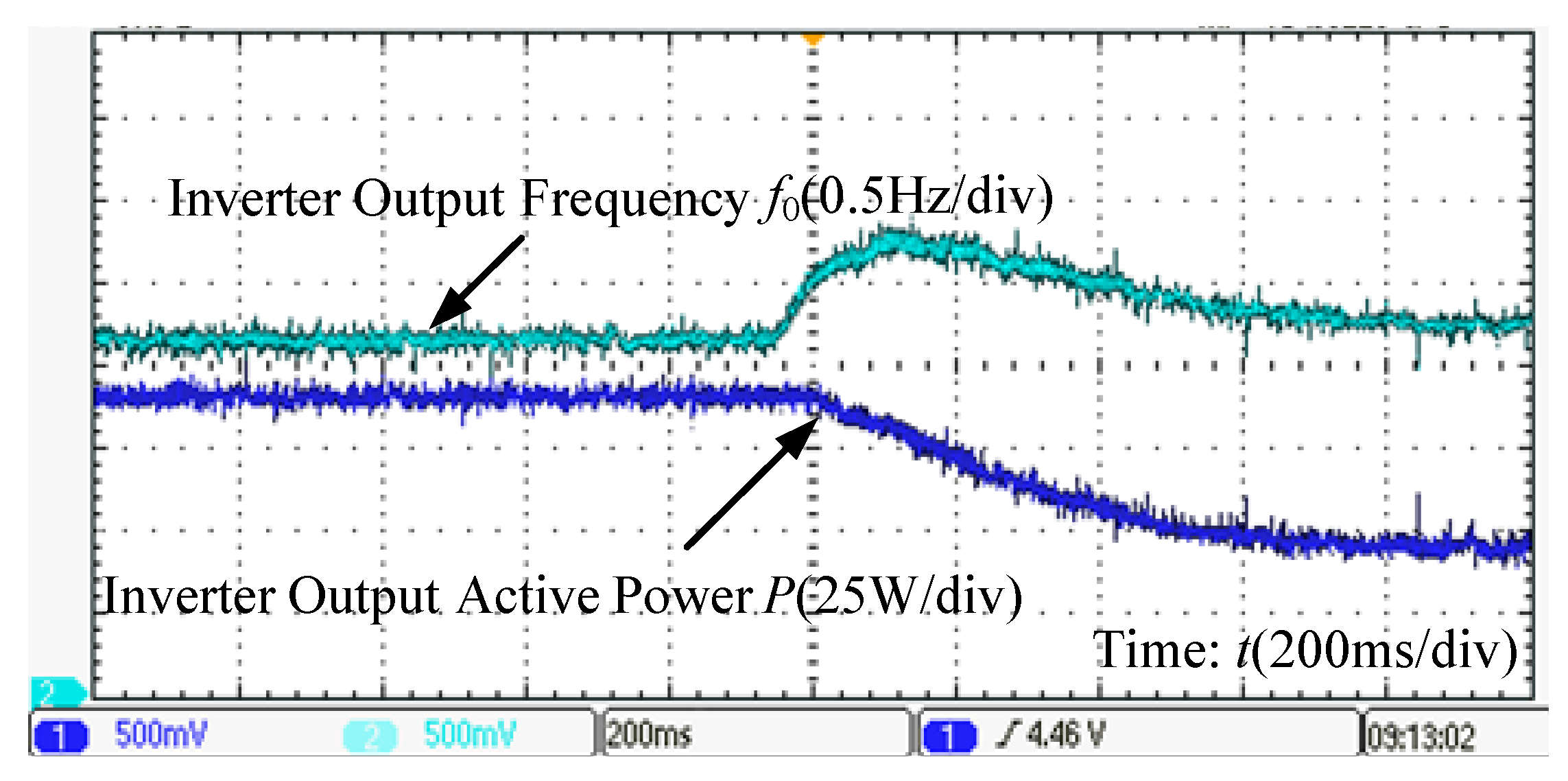
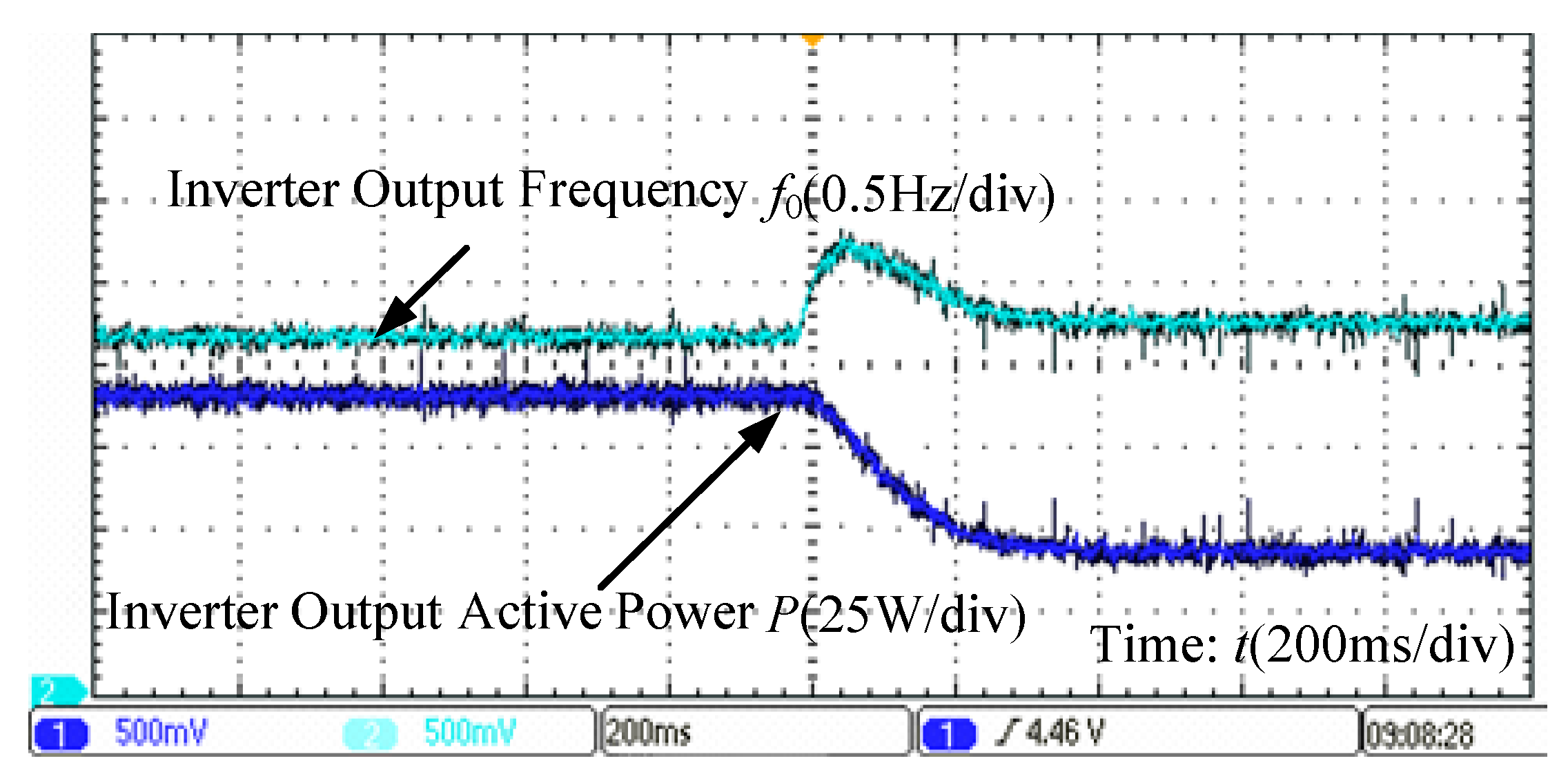
4.2. Experimental Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lv, Z.P.; Sheng, W.X.; Zhong, Q.C.; Liu, H.; Zeng, Z.; Yang, L.; Liu, L. Virtual synchronous generator and its applications in micro-grid. Proc. CSEE 2014, 34, 2591–2603. [Google Scholar]
- Liu, F.; Wang, M.; Xie, Z.; Wang, F.; Deng, J.; Zhang, X. VSG control and parameters design based on virtual synchronous generator. In Proceedings of the 2018 International Power Electronics Conference, Niigata, Japan, 20–24 May 2018; pp. 2992–2996. [Google Scholar]
- Yan, X.W.; Liu, Z.N.; Zhang, B.; Lü, Z.; Su, X.; Xu, H.; Ren, Y. Small-signal stability analysis of parallel inverters with synchronous generator characteristics. Power Syst. Technol. 2016, 40, 910–917. [Google Scholar]
- Du, W.; Jiang, Q.R.; Chen, J.R. Frequency control strategy of distributed generations based on virtual inertia in a microgrid. Autom. Electr. Power Syst. 2011, 35, 26–36. [Google Scholar]
- Meng, J.H.; Wang, Y.; Shi, X.C.; Fu, C.; Li, P. Control strategy and parameter analysis of distributed inverters based on VSG. Trans. China Electrotech. Soc. 2014, 29, 1–10. [Google Scholar]
- Toshinobu, S.; Yushi, M.; Toshifumi, I. Oscillation damping of a distributed generator using a virtual synchronous generator. IEEE Trans. Power Deliv. 2014, 29, 668–676. [Google Scholar]
- Wei, Y.L.; Zhang, H.; Song, Q. Contrlo strategy for parallel-operated virtual synchronous generators. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference, Hefei, China, 22–26 May 2016; pp. 16–22. [Google Scholar]
- Tao, L.; Cheng, J.Z.; Wang, W.X.; Gong, J.; Sun, J. Methods of parameter design and optimization in virtual synchronous generator technology. Power Syst. Prot. Control 2018, 46, 128–135. [Google Scholar]
- Wu, H.; Ruan, X.B.; Yang, D.S.; Chen, X.; Zhong, Q.; Lu, Z.P. Modeling of the power loop and parameter design of virtual synchronous generators. Proc. CSEE 2015, 35, 6508–6518. [Google Scholar]
- Wu, H.; Ruan, X.B.; Yang, D.S.; Chen, X.; Zhao, W.; Lv, Z.; Zhong, Q.-C. Small-signal modeling and parameters design for virtual synchronous generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]
- Wu, M.; Lv, Z.P.; Qin, L.; Song, Z.H.; Sun, L.J.; Zhao, T.; Xu, J.; Gao, J. Robust control parameter design for virtual synchronous generator under variable operation conditions of grid. Power Syst. Technol. 2019, 43, 3743–3751. [Google Scholar]
- Wang, L.; Ju, Y.T.; Wu, W.C.; Chen, X. Optimal design of inertia and damping parameters of virtual synchronous microgrid for improving frequency stability. Proc. CSEE 2021, 41, 4479–4489. [Google Scholar]
- Huang, H.; Wang, L.; Wei, Y.L.; Zhao, J.R.; Xiao, F.; Ma, B.L.; Yang, X.R. Research on the virtual synchronous generator in microgrid. Electr. Drive 2019, 49, 45–50. [Google Scholar]
- Huo, X.X.; Huang, X.; Wang, K.Y.; Yan, J.J.; Xu, K.; Yao, C.; Chen, P.Y. Research on frequency stability control for micro-grid based on virtual synchronous generator. Mod. Electr. Power 2019, 36, 45–52. [Google Scholar]
- Yang, Y.; Mei, F.; Zhang, C.Y.; Miao, H.; Chen, H.; Zheng, J. Coordinated adaptive control strategy of rotational inertia and damping coefficient for virtual synchronous generator. Electr. Power Autom. Equip. 2019, 39, 125–131. [Google Scholar]
- Deng, P.; Yang, P.H. Research on frequency optimal regulation of hybrid energy storage virtual synchronous machine. J. Power Supply 2022, 8, 1–13. [Google Scholar]
- Yan, X.W.; Zhang, W.C.; Cui, S.; Huang, H.Y.; Li, T.C. Frequency response characteristics and adaptive parameter tuning of voltage-sourced converters under VSG control. Trans. China Electrotech. Soc. 2021, 36, 241–254. [Google Scholar]
- Zou, P.G.; Meng, J.H.; Wang, Y.; Lei, X. Influence analysis of the main control parameters in FVSG on the frequency stability of the system. High Volt. Eng. 2018, 44, 1135–1342. [Google Scholar]
- Sheng, W.X.; Lu, Z.P.; Cui, J.; Liu, H.T. Calculation and parameter analysis of virtual synchronous machine operation area. Power Grid Technol. 2019, 43, 1557–1565. [Google Scholar]
- Li, J.C. Design and Application of Modern Synchronous Generator Excitation System; China Electric Power Press: Beijing, China, 2009. [Google Scholar]
- He, Y.Z.; Wen, Z.Y. Power System Analysis; Huazhong University of Science and Technology Press: Wuhan, China, 2009. [Google Scholar]
- Meng, J.H.; Shi, X.C.; Wang, Y.; Fu, C.; Li, P. Study on control strategy of Der inverter for improving frequency stability of microgrid. J. Electr. Technol. 2015, 30, 70–79. [Google Scholar]
- Erickson, R.W.; Maksimovie, D. Fundamentals of Power Electronics; Kluwer Academic Publishers: Alphen aan den Rijn, The Netherlands, 2010. [Google Scholar]
- Gao, J.; Qin, L. Input impedance modeling and stability analysis of virtual synchronous generator. Power Grid Technol. 2021, 45, 578–588. [Google Scholar]
- Kunder, P. Power system stability and control. IEEE Trans. Power Electron. 2007, 7, 103. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| P0 | Rated active power | 19 kW |
| Udc | DC-side voltage | 700 V |
| Ug | Grid voltage | 220 V |
| I2 | Rated current | 56.75 A |
| L1 | Inverter-side inductor | 2 mH |
| C | Filter capacitor | 10 μF |
| L2 | Grid-side inductance | 0.3 mH |
| Zg1 | Grid impedance | 3 mH |
| Zg2 | Grid impedance | 6 mH |
| fs | Switching frequency | 20 kHz |
| Kp | PI regulator parameters | 0.02334 |
| Ki | PI regulator parameters | 65.53 |
| σ | Overshoot | 15% |
| ξ | Engineering damping coefficient | 0.707 |
| J | Rotational inertia | 0.00283 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Chen, J.; Wang, X.; Zhang, X.; Zhao, X. Dynamic Stability Study of Grid-Connected Inverter Based on Virtual Synchronizer under Weak Grid. Energies 2022, 15, 7091. https://doi.org/10.3390/en15197091
Li Y, Chen J, Wang X, Zhang X, Zhao X. Dynamic Stability Study of Grid-Connected Inverter Based on Virtual Synchronizer under Weak Grid. Energies. 2022; 15(19):7091. https://doi.org/10.3390/en15197091
Chicago/Turabian StyleLi, Yinghui, Jianan Chen, Xiaohuan Wang, Xudong Zhang, and Xiaojun Zhao. 2022. "Dynamic Stability Study of Grid-Connected Inverter Based on Virtual Synchronizer under Weak Grid" Energies 15, no. 19: 7091. https://doi.org/10.3390/en15197091
APA StyleLi, Y., Chen, J., Wang, X., Zhang, X., & Zhao, X. (2022). Dynamic Stability Study of Grid-Connected Inverter Based on Virtual Synchronizer under Weak Grid. Energies, 15(19), 7091. https://doi.org/10.3390/en15197091