
Sensitivity of Piezoresistive Pressure Sensors to Acceleration


Abstract
:1. Introduction
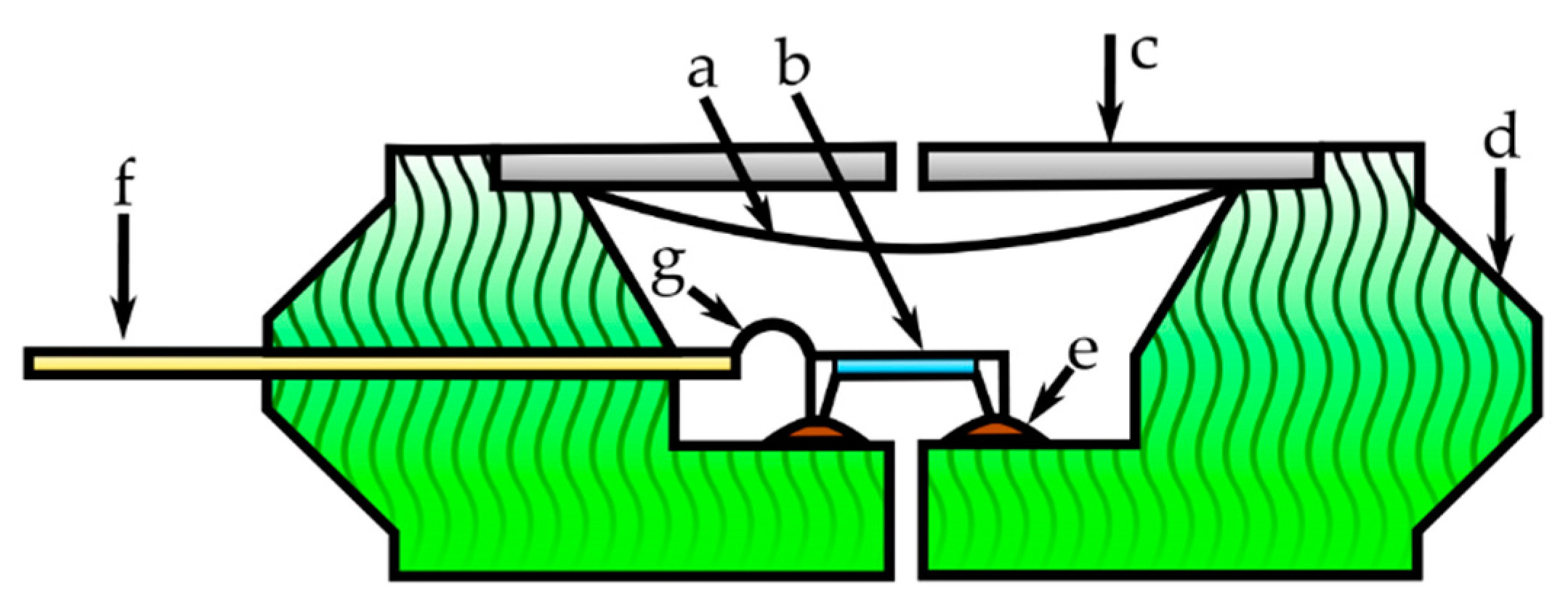
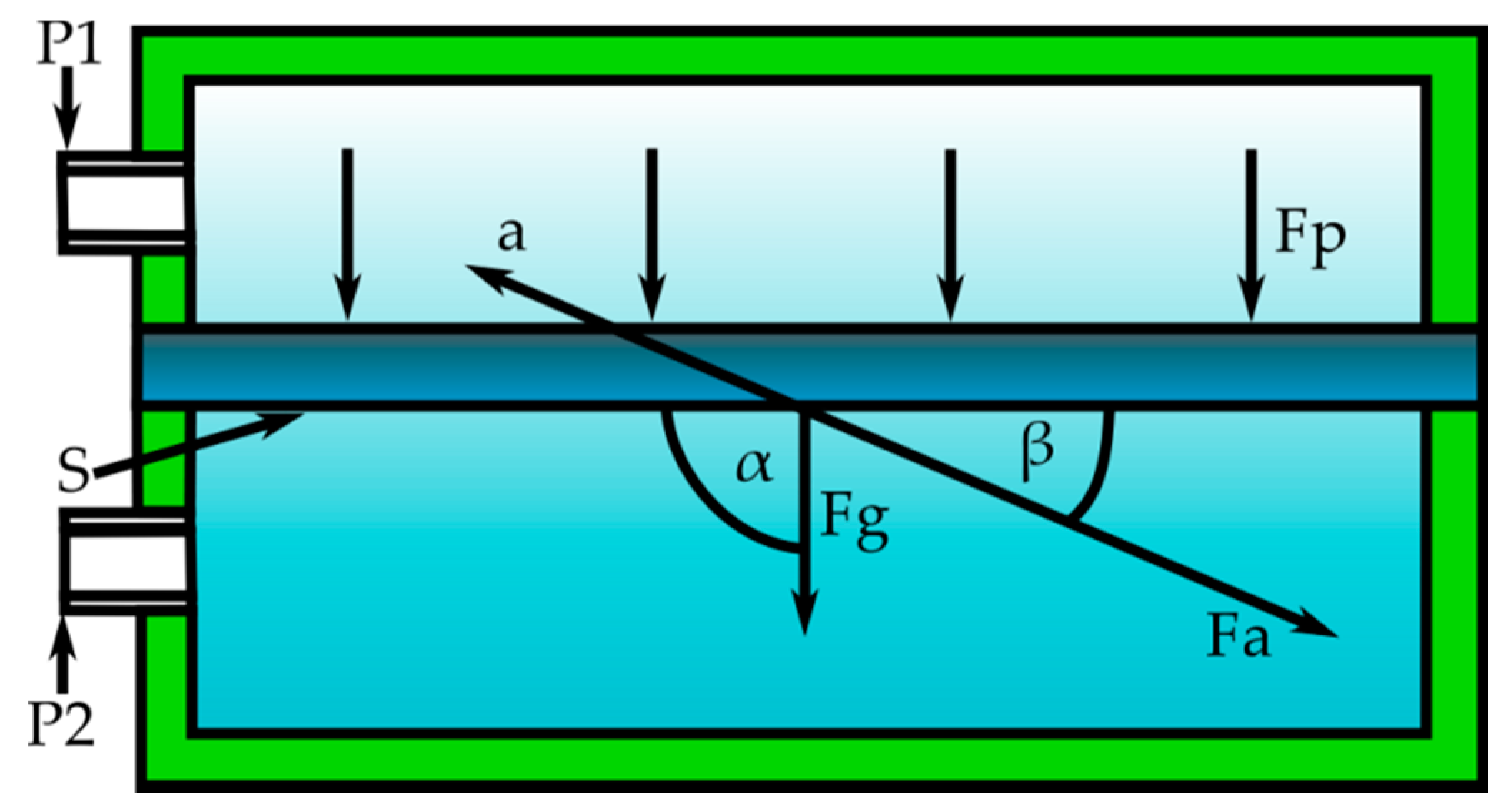
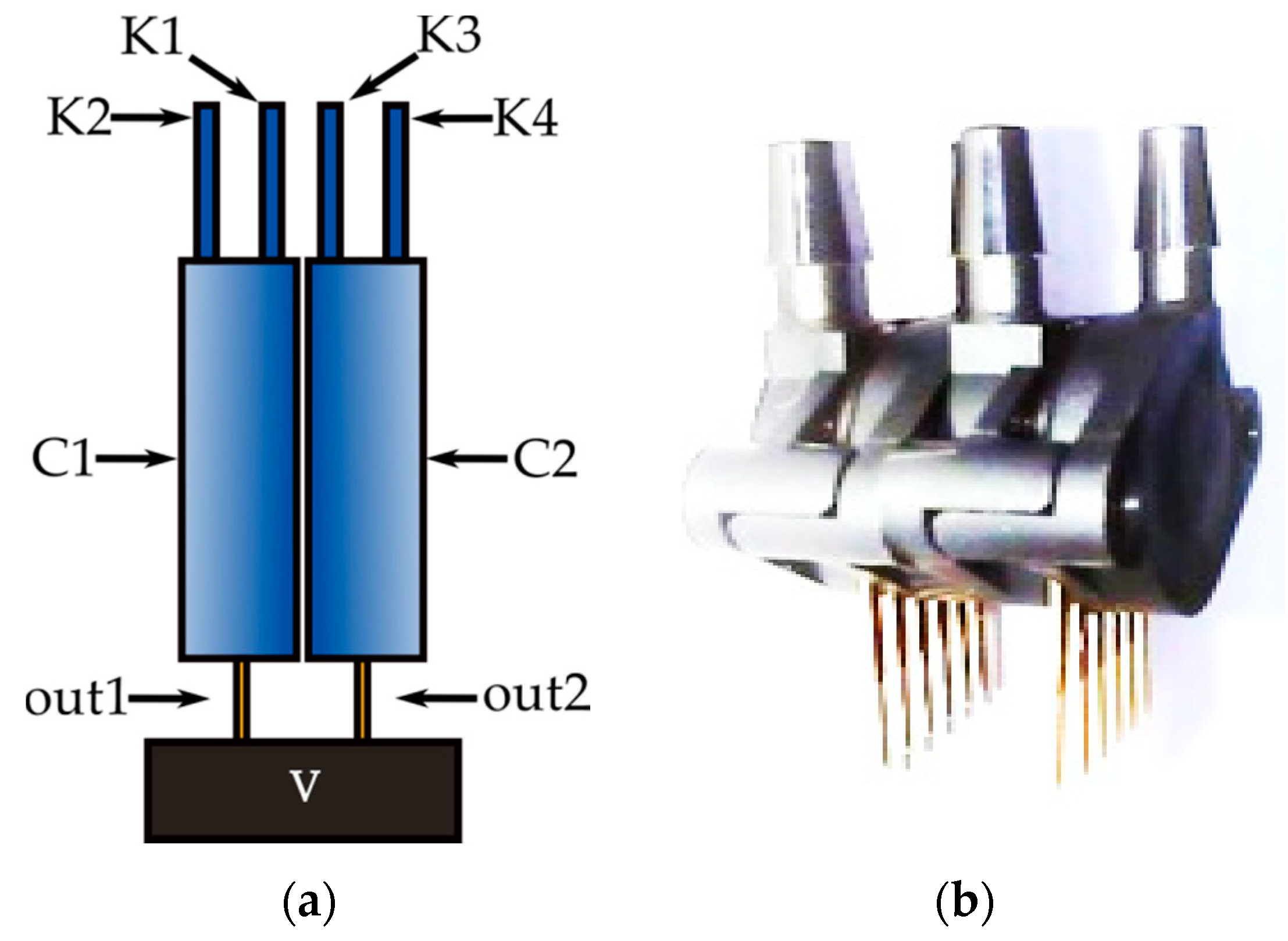
2. Influence of Acceleration on the Measuring Structure of Pressure Transducers
3. Research Results of the Influence of Acceleration on the Measuring Accuracy of Pressure Transducers
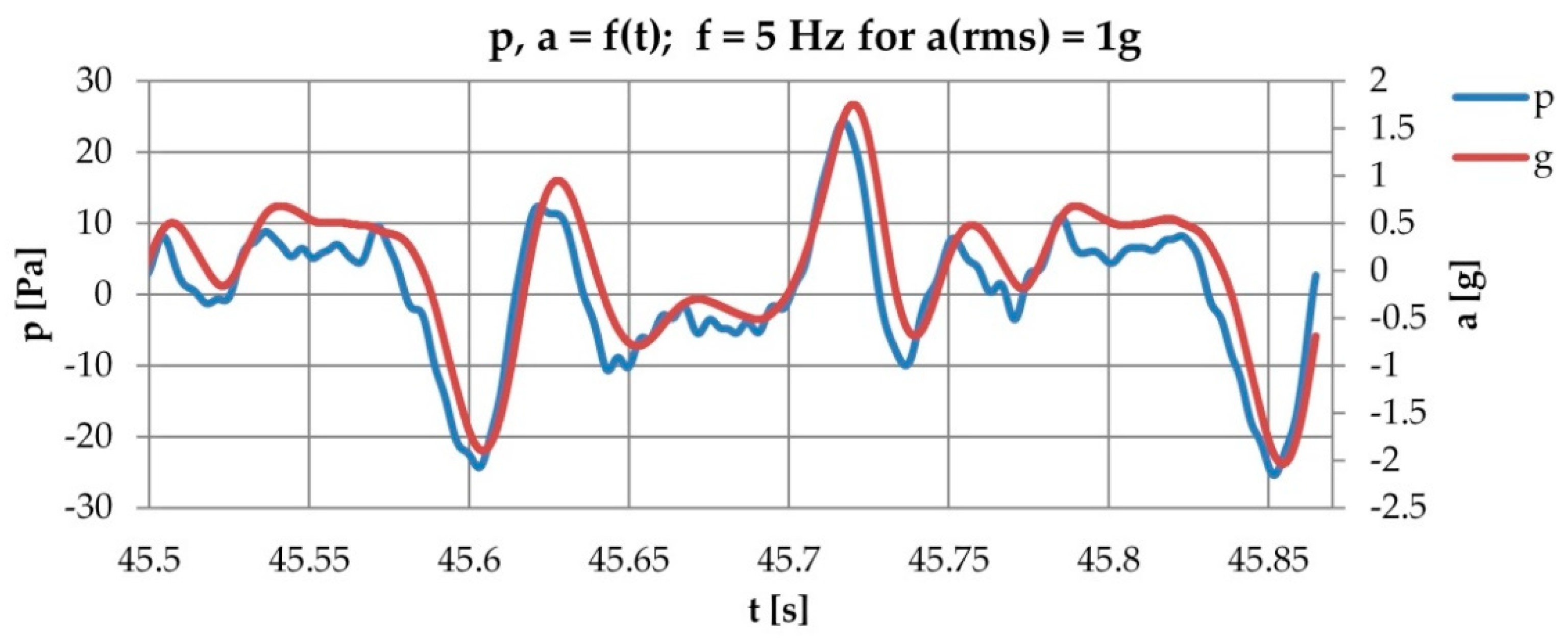
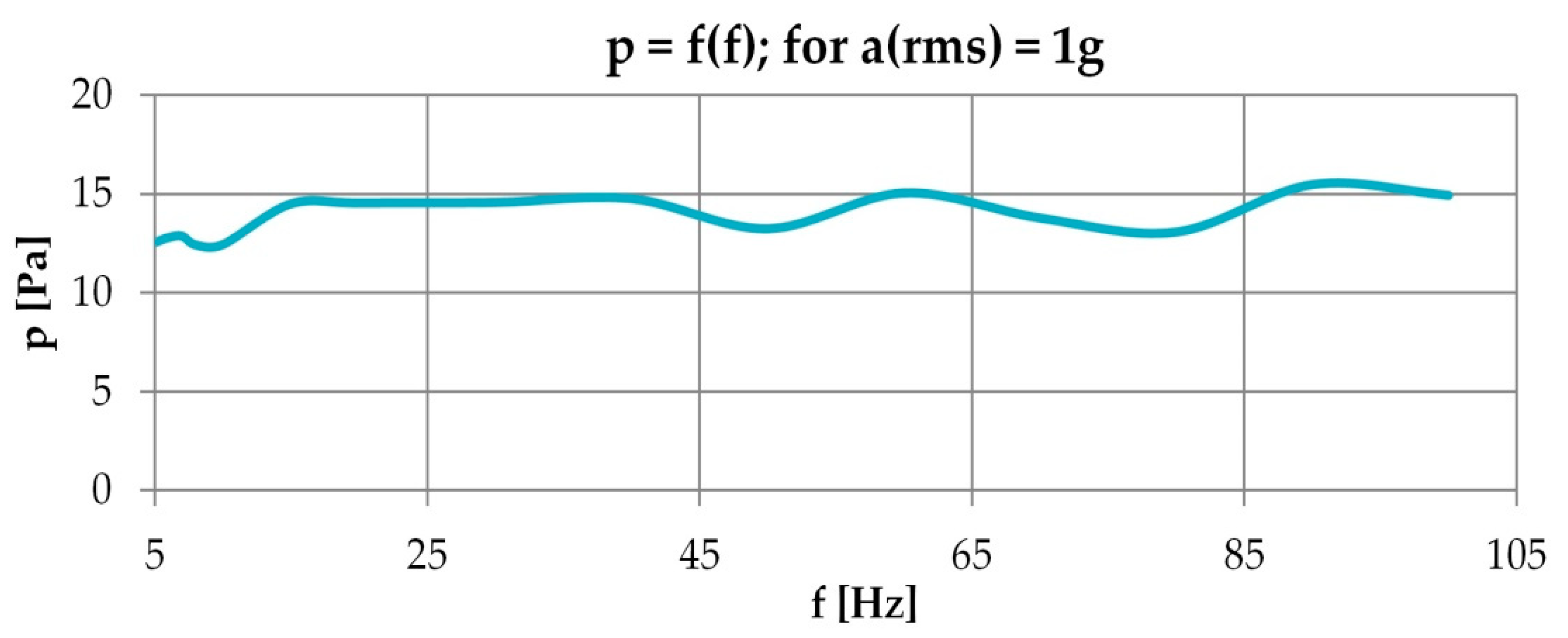
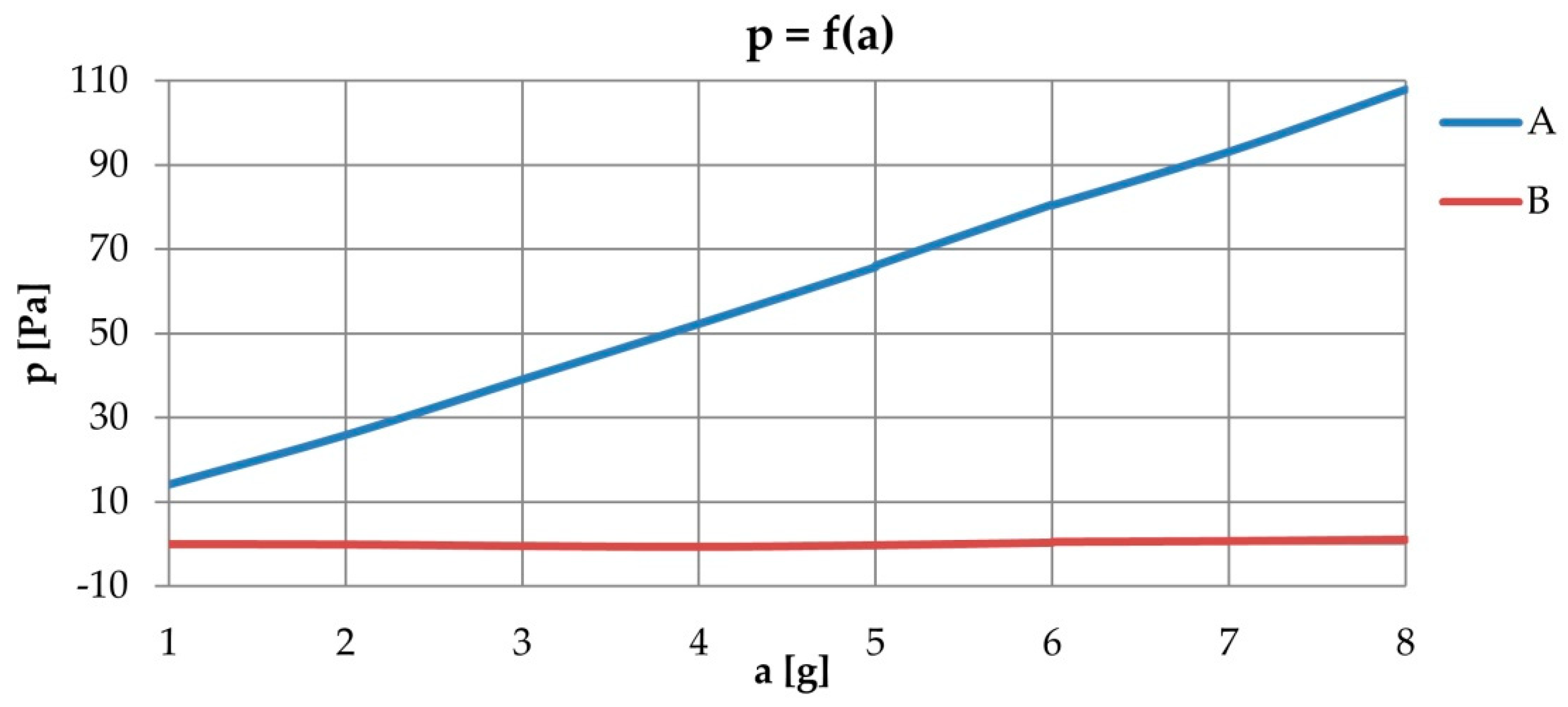
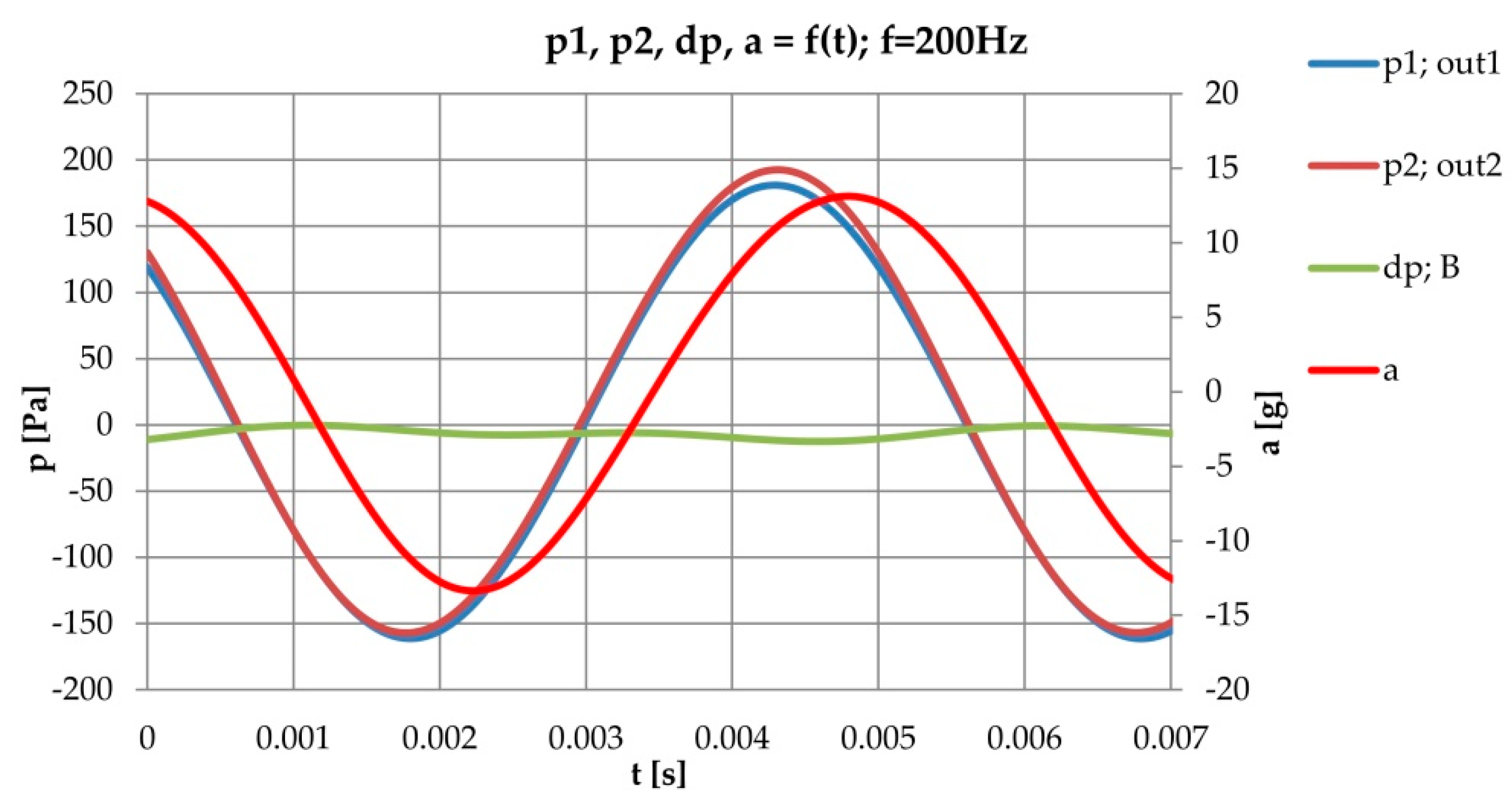
3.1. Influence of the Dynamic Component of Acceleration on the Pressure Measurement
3.2. Examples of Incorrect Use of Chosen Pressure Sensors
Speed Measurement of Flying Objects
- Type of wind turbine: vertical type;
- Rotational speed: 300 [rpm];
- Staggering radius: 1.2 [m];
- N = 300 [rpm] = 5 [Hz] so: ω =31.4159265
- Centripetal acceleration:
- So, the maximum output from acceleration for the sensor shown:
4. The Research Methodology and Proposed Solution
4.1. The Proposed Method for Eliminating the Influence of Acceleration on the Measurement and Error of the Pressure Sensor
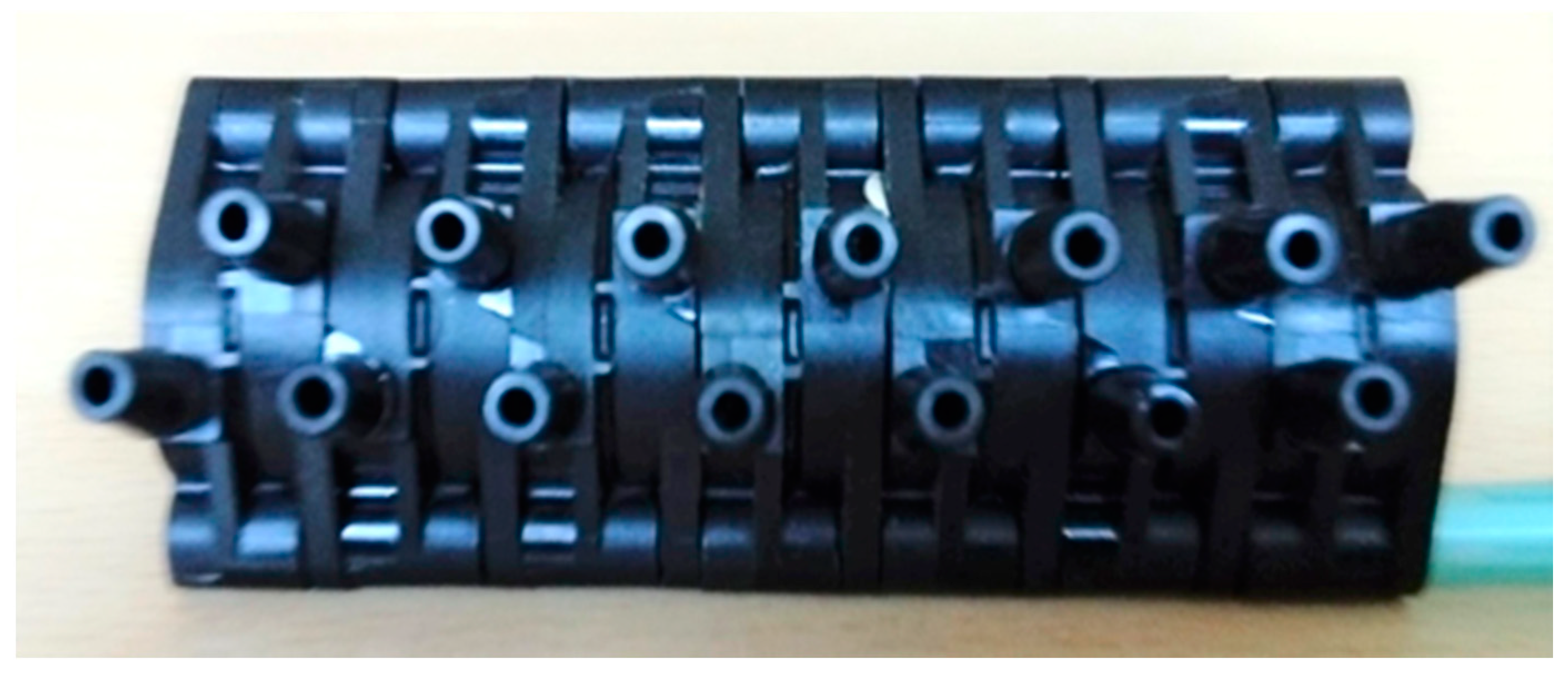
4.2. Proposed Multi-Point Pressure Measurement System
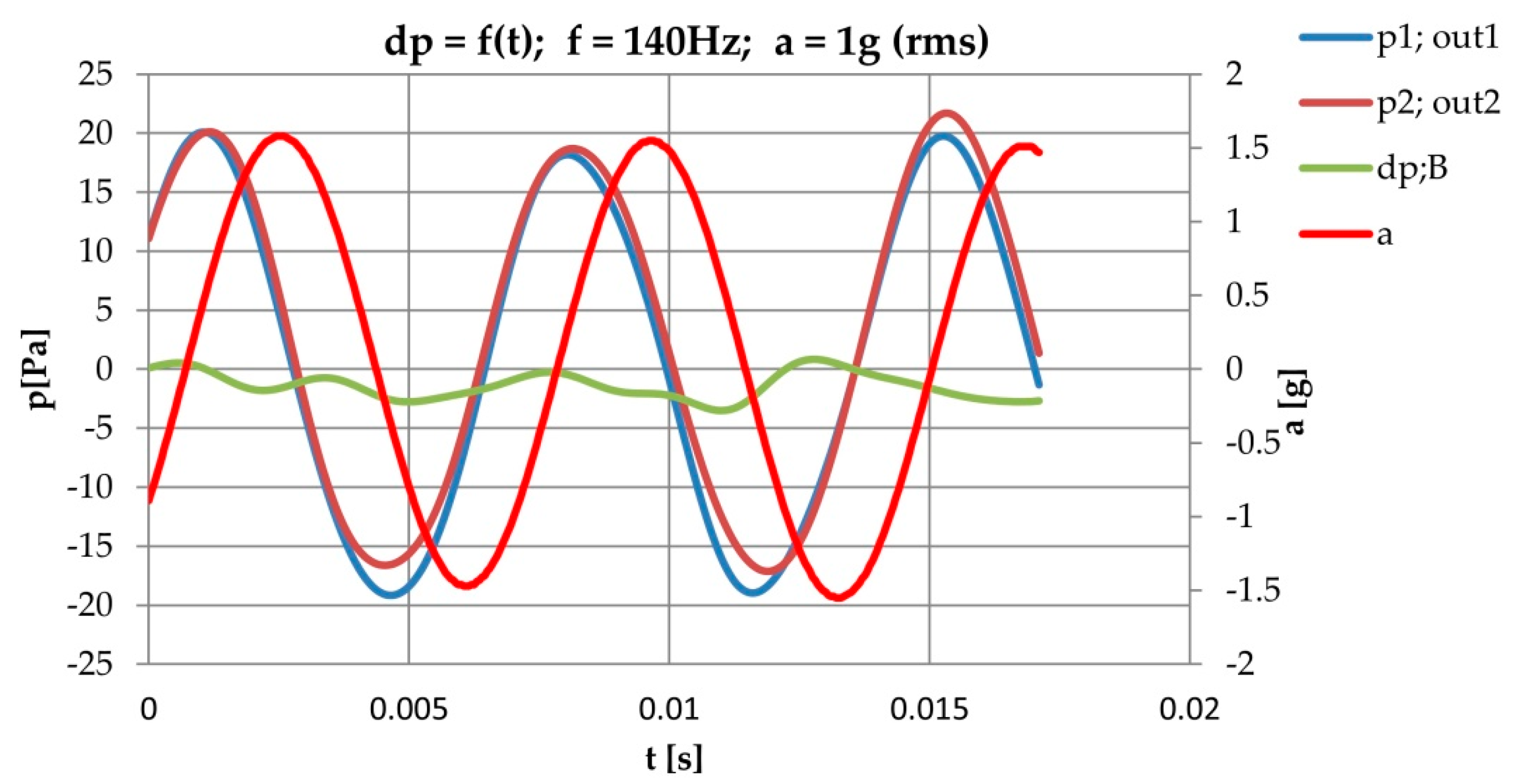
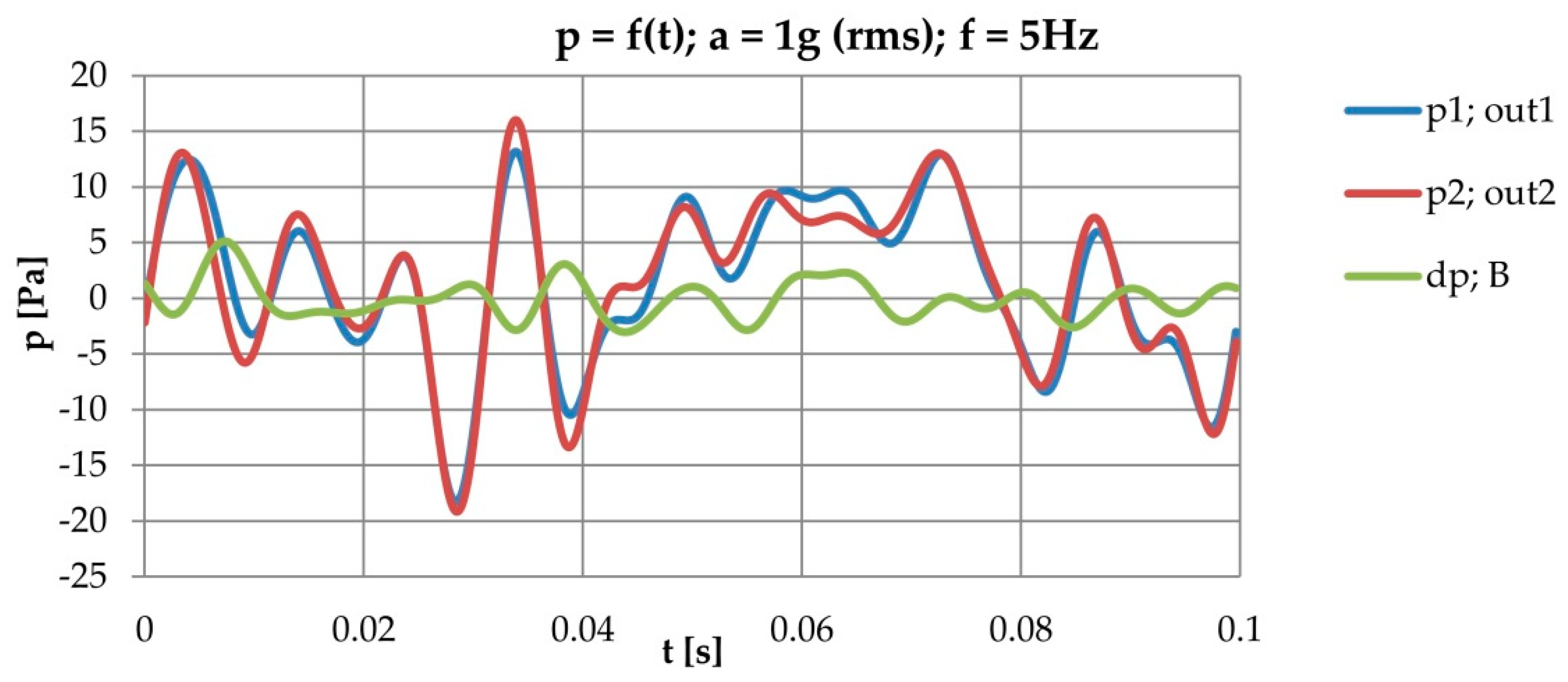
5. Research Results of the Proposed Hybrid Compensated Transducer
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rónai, L.; Lénárt, J.; Szabó, T. Development of a Low-cost Pressure Sensor. Int. J. Eng. Manag. Sci. 2020, 5, 33–38. [Google Scholar] [CrossRef]
- Dhanaselvam, P.S.; Kumar, D.S.; Ramakrishnan, V.N. Pressure Sensors Using Si/ZnO Heterojunction Diode. Silicon 2021, 1–7. [Google Scholar] [CrossRef]
- Kordrostami, Z.; Hassanli, K.; Akbarian, A. MEMS piezoresistive pressure sensor with patterned thinning of diaphragm. Microelectron. Int. 2020, 37, 147–153. [Google Scholar] [CrossRef]
- Nag, M.; Kumar, A.; Pratap, B. A novel graphene pressure sensor with zig–zag shaped piezoresistors for maximum strain coverage for enhancing the sensitivity of the pressure sensor. Int. J. Simul. Multidiscip. Des. Optim. 2021, 12. [Google Scholar] [CrossRef]
- Ouyang, H.; Li, Z.; Gu, M.; Hu, Y.; Xu, L.; Jiang, D.; Cheng, S.; Zou, Y.; Deng, Y.; Shi, B.; et al. A Bioresorbable Dynamic Pressure Sensor for Cardiovascular Postoperative Care. Adv. Mater. 2021, 33, 2102302. [Google Scholar] [CrossRef] [PubMed]
- Gao, L.; Wang, M.; Wang, W. Highly Sensitive Pseudocapacitive Iontronic Pressure Sensor with Broad Sensing Range. Nano-Micro Lett. 2021, 13, 140. [Google Scholar] [CrossRef] [PubMed]
- Raab, C.; Rohde-Brandenburger, K. Dynamic flight load measurements with MEMS pressure sensors. CEAS Aeronaut. J. 2021, 12, 737–753. [Google Scholar] [CrossRef]
- Menna, F.; Nocerino, E.; Chemisky, B.; Remondino, F.; Drap, P. Accurate scaling and leveling in underwater photogrammetry with a pressure sensor. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2021, XLIII-B2-2021, 667–672. [Google Scholar] [CrossRef]
- Xu, F.; Ma, T. Modeling and Studying Acceleration-Induced Effects of Piezoelectric Pressure Sensors Using System Identification Theory. Sensors 2019, 19, 1052. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kapuscinski, T.; Szczerba, P.; Rogalski, T.; Rzucidlo, P.; Szczerba, Z. A Vision-Based Method for Determining Aircraft State during Spin Recovery. Sensors 2020, 20, 2401. [Google Scholar] [CrossRef] [PubMed]
- August, R.; Maudie, T.; Miller, T.; Thomson, E. Acceleration sensitivity of microachined pressure sensors. In Micromachined Devices Components, Proceedings of the Symposium on Micromachining and Microfabrication, Santa Clara, CA, USA, 20 September 1999; French, P.J., Peeters, E., Eds.; SPIE Press: Bellingham, WA, USA, 1999. [Google Scholar] [CrossRef]
- Bao, M.H. Micro Mechanical Transducers. Handbook of Sensors and Actuators; Elsevier: Amsterdam, The Netherlands, 2000; ISBN1 eBook 9780080524030. ISBN2 9780444505583. [Google Scholar]
- Changzheng, W.; Wei, Z.; Quan, W.; Xiaoyuan, X.; Xinxin, L. TPMS (tire-pressure monitoring system) sensors: Monolithic integration of surface-micromachined piezoresistive pressure sensor and self-testable accelerometer. Microelectron. Eng. 2012, 91, 167–173. [Google Scholar] [CrossRef]
- Jiang, B.; Xing-lin, Q.; Jiakai, L.; Bo, J. Design of Piezoresistive MEMS Pressure Sensor Chip for Special Environments. Sens. Transducers IFSA 2014, 174, 1–7. [Google Scholar]
- Mayer, D.; Palczynska, A.; Gromala, P.J.; Han, B.; Melz, T. In-situ investigation of EMC relaxation behavior using piezoresistive stress sensor. Microelectron. Reliab. Elsevier 2016, 62, 58–62. [Google Scholar] [CrossRef]
- Ni, Z.; Yang, C.; Xu, D.; Zhou, H.; Zhou, W.; Li, T.; Xiong, B.; Li, X. Monolithic Composite “Pressure + Acceleration + Temperature + Infrared” Sensor Using a Versatile Single-Sided “SiN/Poly-Si/Al” Process-Module. Sensors 2013, 13, 1085–1101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, J.; Zhao, Y.; Jiang, Z.; Sun, J. A monolithic silicon multi-sensor for measuring three-axis acceleration, pressure and temperature. J. Mech. Sci. Technol. 2008, 22, 731–739. [Google Scholar] [CrossRef]
- Directory Notes. Aplisens; 2010. Available online: https://aplisens.pl/pdf/produkty/PR-50G.pdf (accessed on 24 November 2021).
- Directory Notes. Freescale; 2008; Rev 13, 10/2008. Available online: http://www.farnell.com/datasheets/75009.pdf (accessed on 24 November 2021).
- Wang, J.; Xia, X.; Li, X. Monolithic integration of pressure plus acceleration composite TMPS sensor with a single-sided micromachining technology. J. Microelectromechanical Syst. 2012, 21, 284–293. [Google Scholar] [CrossRef]
- Wilson, J.S. Sensor Technology Handbook; Elsevier: Amsterdam, The Netherlands, 2005; ISBN 0-7506-7729-5. [Google Scholar]
- Bishop, R.H. The Mechatronics Handbook; The University of Texas at Austin: Austin, TX, USA, 2002; ISBN 0-8493-0066-5. [Google Scholar]
- Büttgenbach, S.; Constantinou, I.; Dietzel, A.; Leester-Schädel, M. Case Studies in Micromechatronics; Springer: Cham, Switzerland, 2020; ISBN1 978-3-662-61319-1. ISBN2 978-3-662-61320-7. [Google Scholar] [CrossRef]
- Directory Notes. Sensortechnics; 2011; e/11628 2011. Available online: https://dtsheet.com/doc/705314/sensortechnics-hcla0075du (accessed on 24 November 2021).
- Szczerba, Z.; Szczerba, P. Unpublished Materials of the Own Study of Pressure Sensors. 2014–2021. [Google Scholar]
- Szczerba, Z.; Szczerba, P. Selected properties of modern pressure transducers. Electrotech Rev. 2016, 1, 192–195. [Google Scholar] [CrossRef]
- Mazur, D.; Szczerba, Z.; Gołębiowski, L.; Smoleń, A.; Gołębiowski, M. Modeling and Analysis of the AFPM Generator in a Small Wind Farm System. In Methods and Techniques of Signal Processing in Physical Measurements; Hanus, R., Mazur, D., Kreischer, C., Eds.; Springer: Cham, Switzerland, 2019; ISBN/ISSN: 978-3-030-11186-1. [Google Scholar] [CrossRef]
- Szczerba, Z. Pressure Sensor and Pressure Measuring Method. Patent P-225030 28.02.2017. Available online: https://ewyszukiwarka.pue.uprp.gov.pl/search/pwp-details/P.406992 (accessed on 24 November 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Transducer | Catalog Data [Pa/1g] | Research Data [Pa/1g] |
|---|---|---|
| Aplisens PR50 (1kPa) | No data | 8 |
| Aplisens PR50 (10 kPa) | No data | 12 |
| Freescale MPX 2010 (10 kPa) | No data | 13 |
| PAN PRC10 (1kPa) | No data | 40 |
| G | Acceleration Influence [Pa] | w (Aircraft Speed) [m/s] | w (Aircraft Speed) [km/h] |
|---|---|---|---|
| 1 | 13 | 5 | 18 |
| 5 | 65 | 10 | 36 |
| 10 | 130 | 15 | 54 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szczerba, Z.; Szczerba, P.; Szczerba, K. Sensitivity of Piezoresistive Pressure Sensors to Acceleration. Energies 2022, 15, 493. https://doi.org/10.3390/en15020493
Szczerba Z, Szczerba P, Szczerba K. Sensitivity of Piezoresistive Pressure Sensors to Acceleration. Energies. 2022; 15(2):493. https://doi.org/10.3390/en15020493
Chicago/Turabian StyleSzczerba, Zygmunt, Piotr Szczerba, and Kamil Szczerba. 2022. "Sensitivity of Piezoresistive Pressure Sensors to Acceleration" Energies 15, no. 2: 493. https://doi.org/10.3390/en15020493
APA StyleSzczerba, Z., Szczerba, P., & Szczerba, K. (2022). Sensitivity of Piezoresistive Pressure Sensors to Acceleration. Energies, 15(2), 493. https://doi.org/10.3390/en15020493