
A Single-Phase Compact-Sized Matrix Converter with Symmetrical Bipolar Buck and Boost Output Voltage Control

 ,
,  ,
,  ,
,  ,
, 
Abstract
:1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Problem Statement
- The overall volume is high as there is a use of more devices or components, especially gate control circuits. This leads to an increase in overall cost and conversion losses.
- The dynamic response is slow as there is a use of a large number of energy-storing devices such as inductors and capacitors.
- Gate control schemes have complex switching algorithms.
- The filtering inductor connected with the load has bidirectional current conduction characteristics, leading to the problem of inductive kicks as there is an abrupt change or interruption in its current.
1.4. Contribution
- Only six transistors are employed to obtain the required output, eliminating the use of two gate drivers, one inductor, and one capacitor. It results in the compactness of the converter as the size of one gate driver is larger compared to the overall size of the switching transistors.
- It also improves the dynamic response and overall conversion losses.
- The direction of the current is kept unidirectional to tackle its current interruption or reversal problem. This characteristic also helps to simplify the feedback control schemes.
- There is no problem with current shoot-through as the direction of the current in the transistors is ensured to be unidirectional by connecting the series diodes.
- The same control scheme can be used to produce the non-inverted or inverted buck or boost operation.
- The state space model for combining voltage buck and boost operation is developed.
1.5. Paper Organization
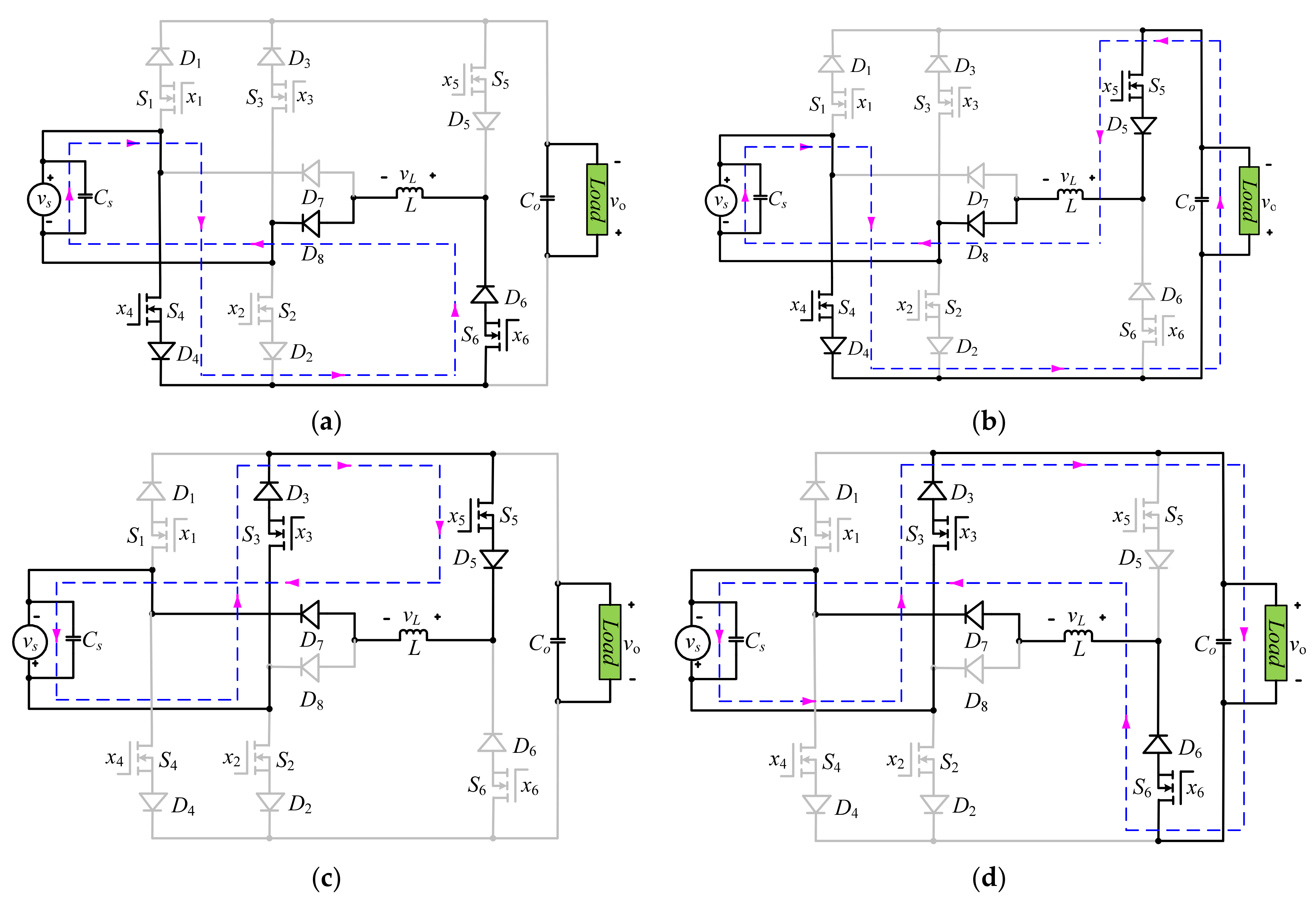
2. Working Principle and Related Operating Modes
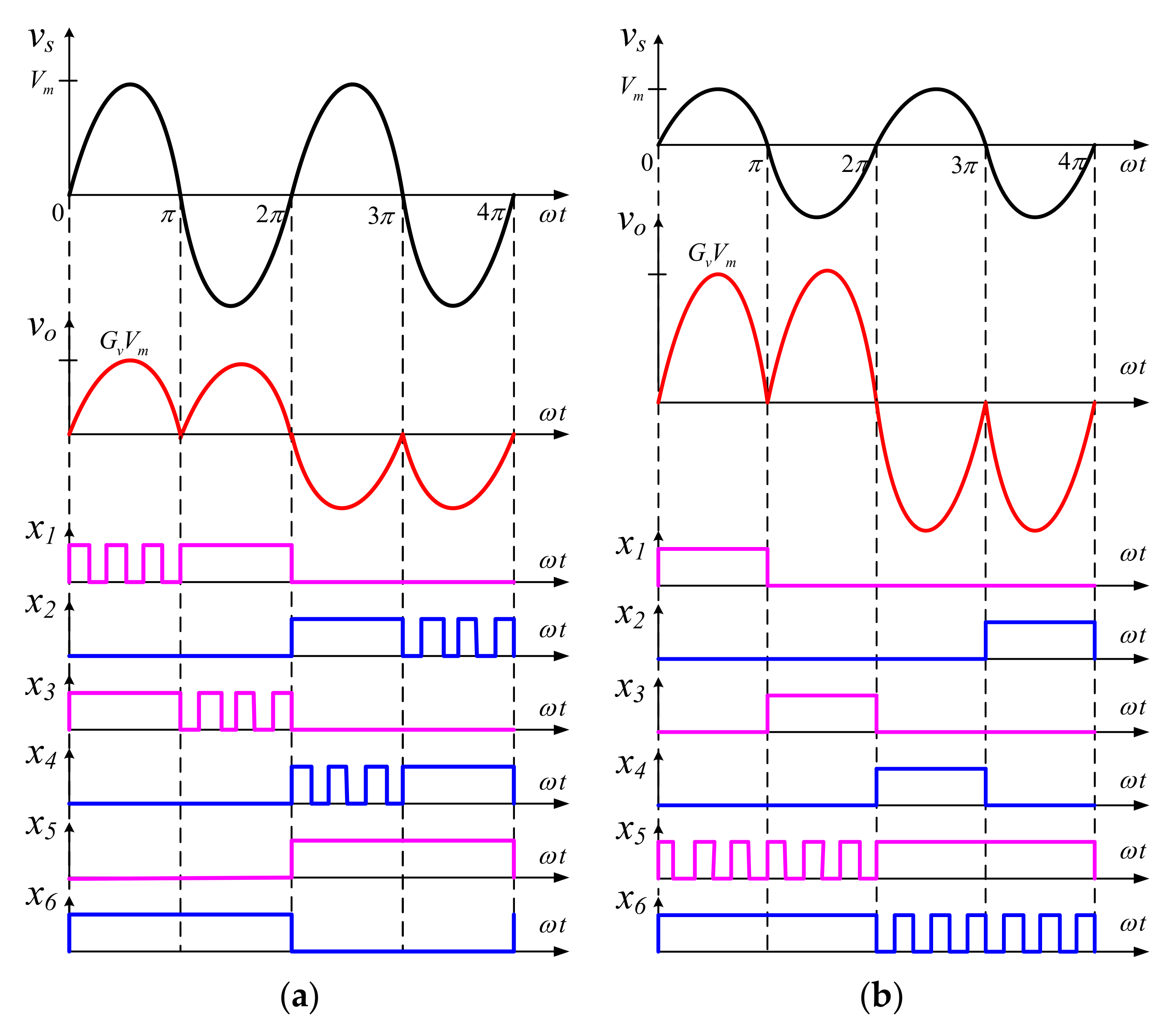
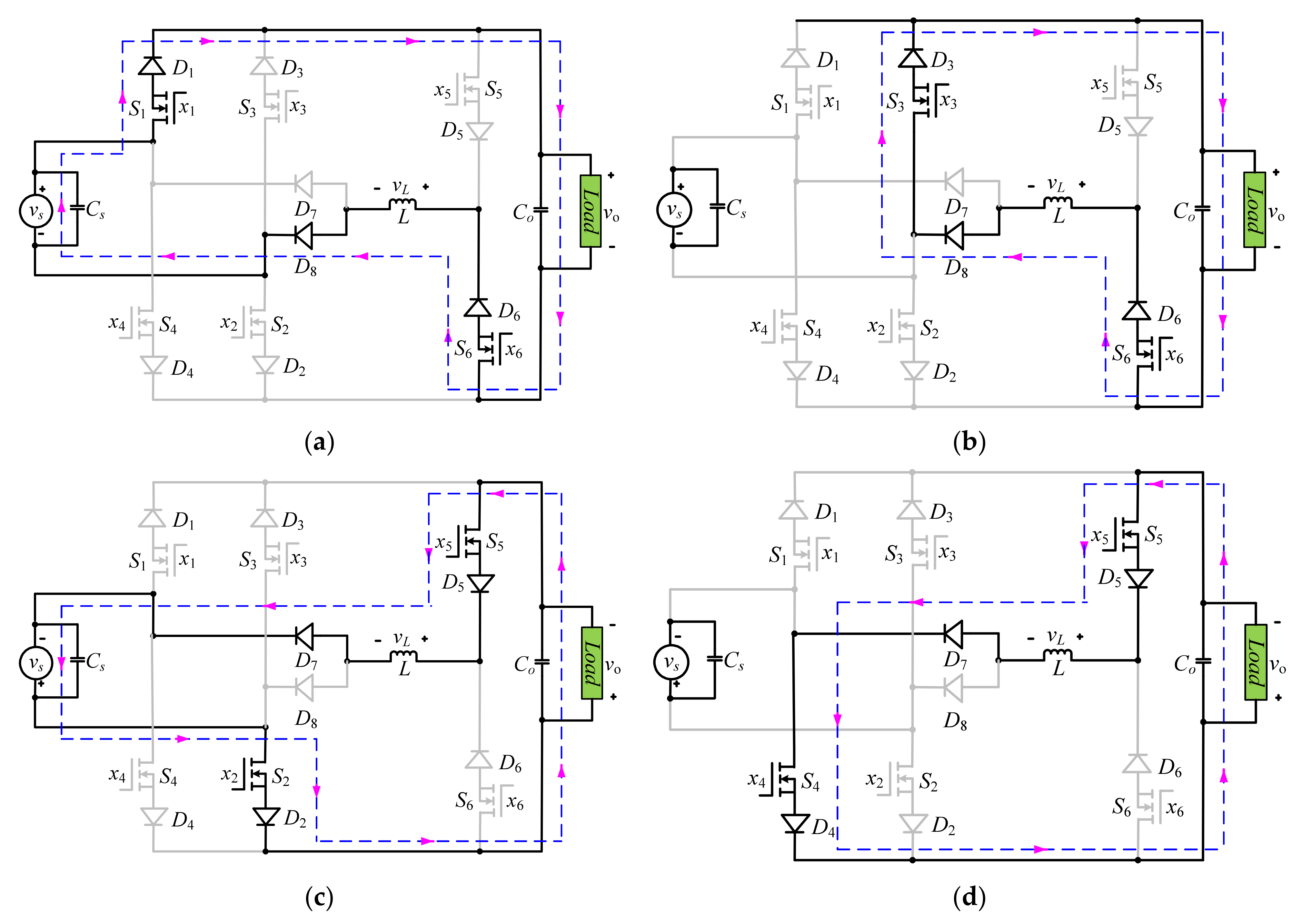
2.1. Generation of Non-Inverted and Inverted Voltage Buck Outputs
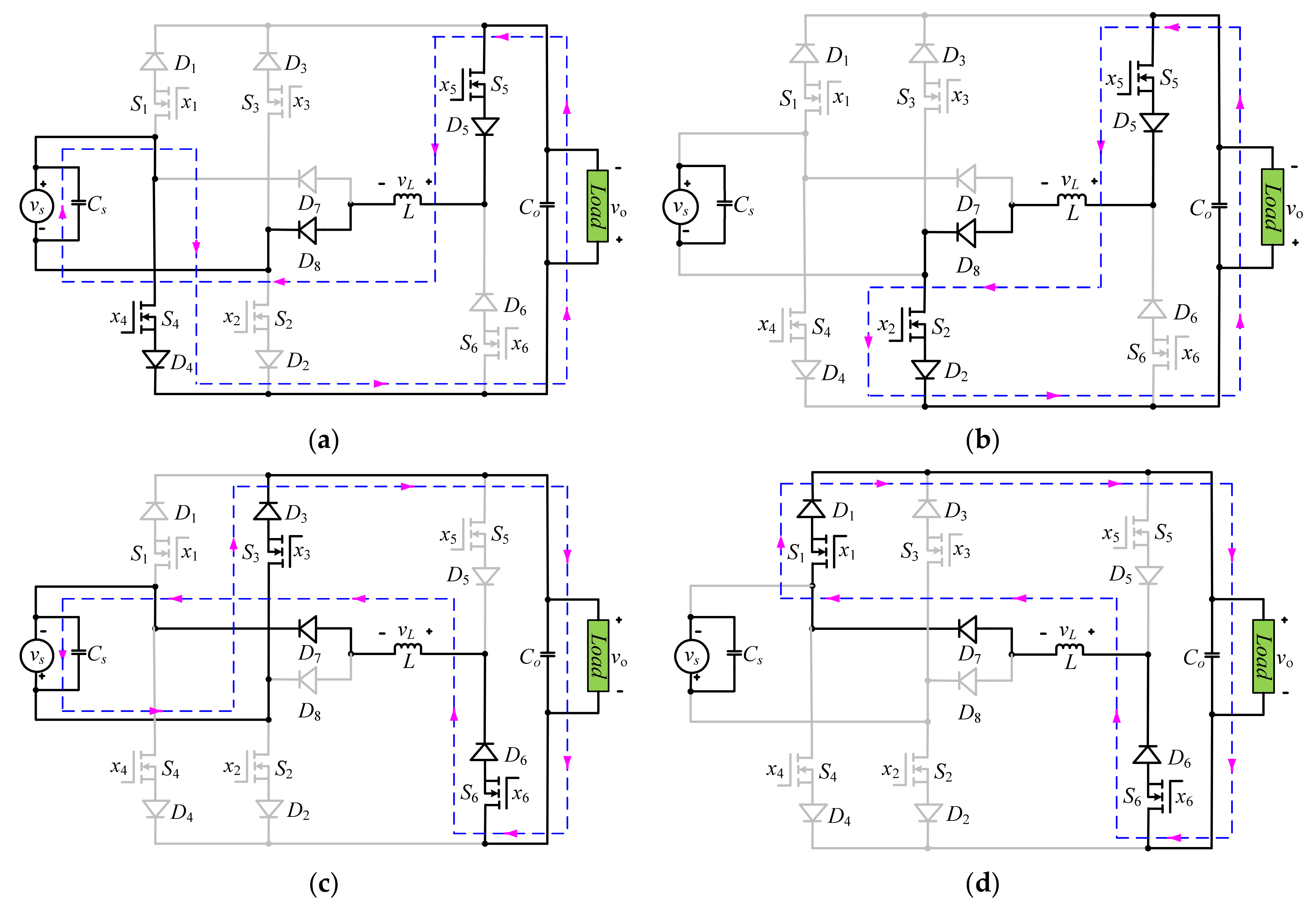
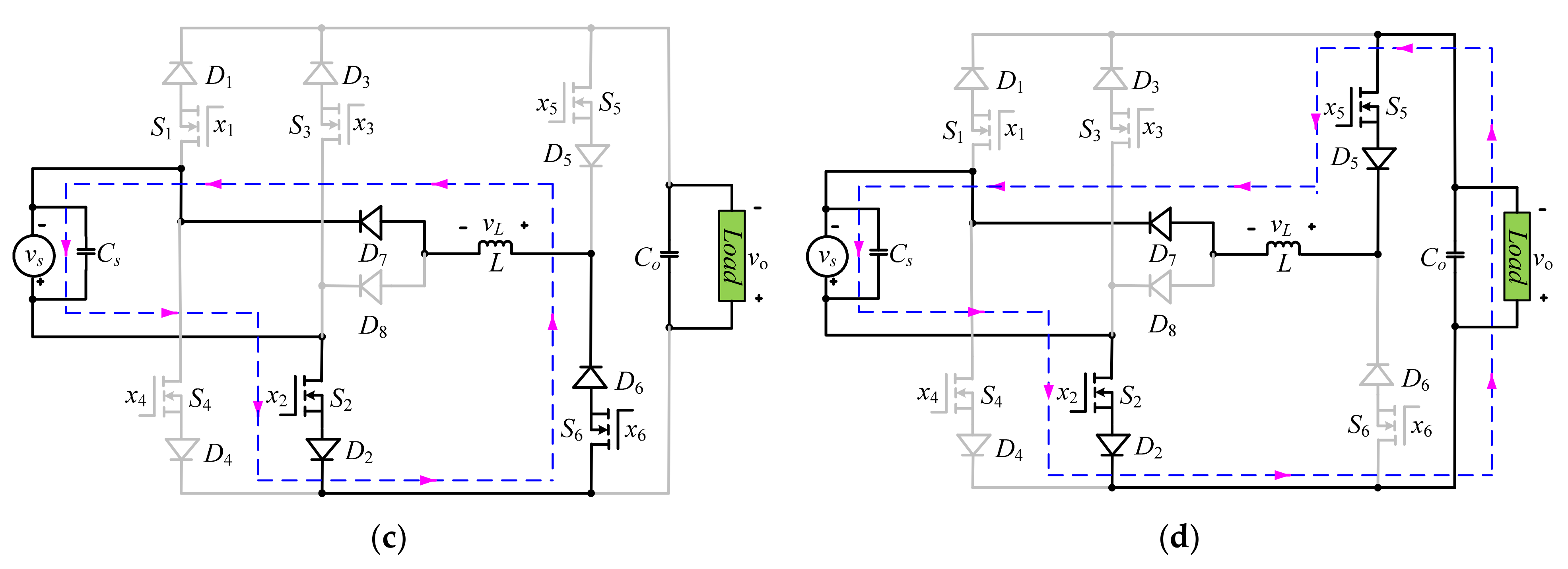
2.2. Generation of Non-Inverted and Inverted Voltage Boost Outputs
3. Comparison and Analysis
4. Results and Discussion
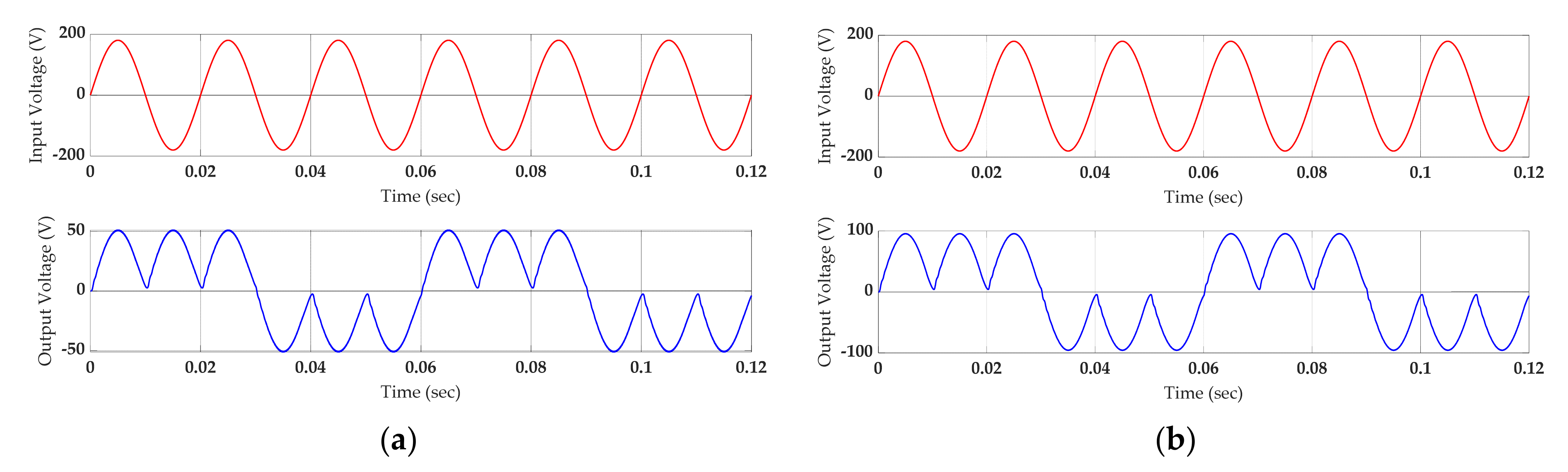
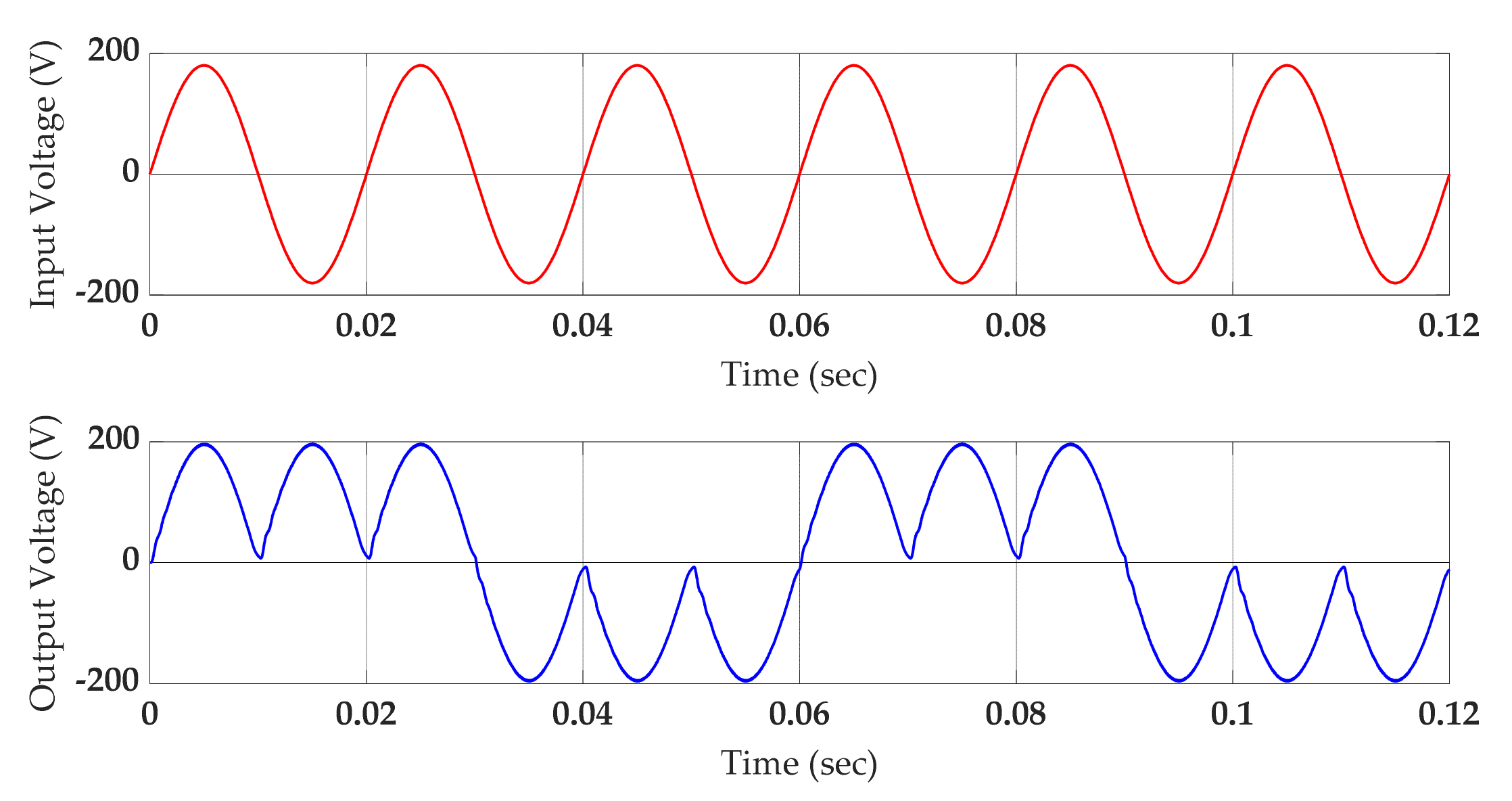
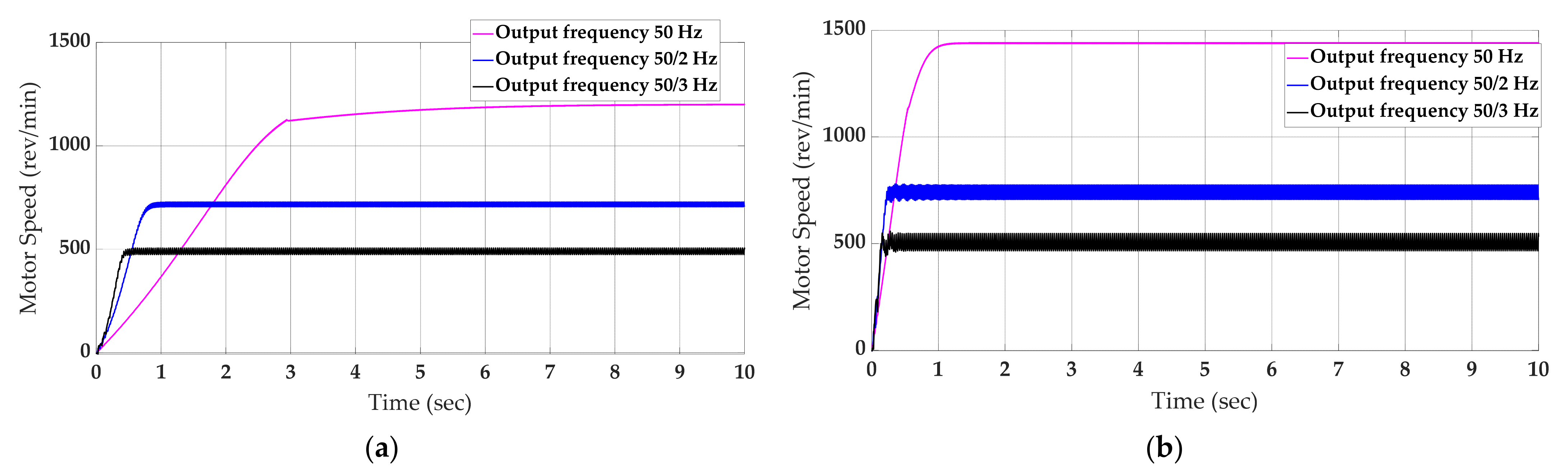
4.1. Simulated Results
4.2. Practical Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abdoli, I.; Mosallanejad, A. A highly efficient isolated single-phase variable frequency AC–AC converter with flexible buck-boost factor, inherent safe commutation, and continuous current. IET Power Electron. 2022. [Google Scholar] [CrossRef]
- Barrera-Cardenas, R.; Molinas, M. Comparative Study of Wind Turbine Power Converters Based on Medium-Frequency AC-Link for Offshore DC-Grids. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 525–541. [Google Scholar] [CrossRef]
- Subramanian, S.; Mishra, M.K. Interphase AC–AC Topology for Voltage Sag Supporter. IEEE Trans. Power Electron. 2010, 25, 514–518. [Google Scholar] [CrossRef]
- Zheng, Z.; Xiao, X.; Chen, X.; Huang, C.; Zhao, L.; Li, C. Performance Evaluation of a MW-Class SMES-BES DVR System for Mitigation of Voltage Quality Disturbances. IEEE Trans. Ind. Appl. 2018, 54, 3090–3099. [Google Scholar] [CrossRef]
- Roldán-Pérez, J.; García-Cerrada, A.; Ochoa-Giménez, M.; Zamora-Macho, J.L. Delayed-Signal-Cancellation-Based Sag Detector for a Dynamic Voltage Restorer in Distorted Grids. IEEE Trans. Sustain. Energy 2019, 10, 2015–2027. [Google Scholar] [CrossRef]
- Biricik, S.; Komurcugil, H.; Ahmed, H.; Babaei, E. Super Twisting Sliding-Mode Control of DVR With Frequency-Adaptive Brockett Oscillator. IEEE Trans. Ind. Electron. 2021, 68, 10730–10739. [Google Scholar] [CrossRef]
- Jothibasu, S.; Mishra, M.K. An Improved Direct AC–AC Converter for Voltage Sag Mitigation. IEEE Trans. Ind. Electron. 2015, 62, 21–29. [Google Scholar] [CrossRef]
- Lodetti, S.; Azcarate, I.; Gutiérrez, J.J.; Leturiondo, L.A.; Redondo, K.; Sáiz, P.; Melero, J.J.; Bruna, J. Flicker of modern lighting technologies due to rapid voltage changes. Energies 2019, 12, 865. [Google Scholar] [CrossRef] [Green Version]
- Kaniewski, J.; Szczesniak, P.; Jarnut, M.; Benysek, G. Hybrid Voltage Sag\/Swell Compensators: A Review of Hybrid AC\/AC Converters. IEEE Ind. Electron. Mag. 2015, 9, 37–48. [Google Scholar] [CrossRef]
- Moghassemi, A.; Padmanaban, S.K. Dynamic voltage restorer (DVR): A comprehensive review of topologies, power converters, control methods, and modified configurations. Energies 2020, 13, 4152. [Google Scholar] [CrossRef]
- Khan, U.A.; Khan, A.A.; Cha, H.; Kim, H.; Kim, J.; Baek, J. Dual-Buck AC–AC Converter with Inverting and Non-Inverting Operations. IEEE Trans. Power Electron. 2018, 33, 9432–9443. [Google Scholar] [CrossRef]
- Sharifi, S.; Monfared, M.; Nikbahar, A. Highly Efficient Single-Phase Direct AC-to-AC Converter with Reduced Semiconductor Count. IEEE Trans. Ind. Electron. 2021, 68, 1130–1138. [Google Scholar] [CrossRef]
- Ran, X.; Xu, B.; Liu, K.; Zhang, J. An Improved Low-Complexity Model Predictive Direct Power Control with Reduced Power Ripples Under Unbalanced Grid Conditions. IEEE Trans. Power Electron. 2022, 37, 5224–5234. [Google Scholar] [CrossRef]
- Kolar, J.W.; Friedli, T.; Rodriguez, J.; Wheeler, P.W. Review of Three-Phase PWM AC–AC Converter Topologies. IEEE Trans. Ind. Electron. 2011, 58, 4988–5006. [Google Scholar] [CrossRef]
- Petrauskas, G.; Svinkunas, G. Application of Single-Phase Supply AC-DC-AC VFD for Power Factor Improvement in LED Lighting Devices Loaded Power Distribution Lines. Appl. Sci. 2022, 12, 5955. [Google Scholar] [CrossRef]
- Liu, X.; Loh, P.C.; Wang, P.; Han, X. Improved Modulation Schemes for Indirect Z-source Matrix Converter With Sinusoidal Input and Output Waveforms. IEEE Trans. Power Electron. 2012, 27, 4039–4050. [Google Scholar] [CrossRef]
- Wang, H.; Wang, H.; Zhu, G.; Blaabjerg, F. An Overview of Capacitive DC-Links-Topology Derivation and Scalability Analysis. IEEE Trans. Power Electron. 2020, 35, 1805–1829. [Google Scholar] [CrossRef]
- Zhao, Z.; Davari, P.; Lu, W.; Wang, H.; Blaabjerg, F. An Overview of Condition Monitoring Techniques for Capacitors in DC-Link Applications. IEEE Trans. Power Electron. 2021, 36, 3692–3716. [Google Scholar] [CrossRef]
- De Freitas, N.B.; Jacobina, C.B.; Cunha, M.F. Multilevel Single-Phase Converter with Two DC Links. IEEE Trans. Ind. Electron. 2020, 67, 10346–10355. [Google Scholar] [CrossRef]
- De Lacerda, R.P.; Jacobina, C.B.; Fabricio, E.L.L.; Rodrigues, P.L.S. Six-Leg Single-Phase AC–DC–AC Multilevel Converter With Transformers for UPS and UPQC Applications. IEEE Trans. Ind. Appl. 2020, 56, 5170–5181. [Google Scholar] [CrossRef]
- Rde Lacerda, P.; Jacobina, C.B.; Fabricio, E.L.L. Single-Phase AC–DC–AC Multilevel Converter Based on Parallel-/Series-Connected Three-Leg Modules. IEEE Trans. Ind. Appl. 2022, 58, 3706–3720. [Google Scholar] [CrossRef]
- Banaei, M.R.; Alizadeh, R.; Jahanyari, N.; Najmi, E.S. An AC Z-Source Converter Based on Gamma Structure with Safe-Commutation Strategy. IEEE Trans. Power Electron. 2016, 31, 1255–1262. [Google Scholar] [CrossRef]
- Vidhya, D.S.; Venkatesan, T. Quasi-Z-Source Indirect Matrix Converter Fed Induction Motor Drive for Flow Control of Dye in Paper Mill. IEEE Trans. Power Electron. 2018, 33, 1476–1486. [Google Scholar] [CrossRef]
- Bozorgi, A.M.; Hakemi, A.; Farasat, M.; Monfared, M. Modulation Techniques for Common-Mode Voltage Reduction in the Z-Source Ultra Sparse Matrix Converters. IEEE Trans. Power Electron. 2019, 34, 958–970. [Google Scholar] [CrossRef]
- Li, P.; Hu, Y. Unified Non-Inverting and Inverting PWM AC–AC Converter with Versatile Modes of Operation. IEEE Trans. Ind. Electron. 2017, 64, 1137–1147. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, H.F.; el Moursi, M.S.; Cha, H.; al Hosani, K.; Zahawi, B. A Reliable Single-Phase Bipolar Buck–Boost Direct PWM AC–AC Converter With Continuous Input/Output Currents. IEEE Trans. Ind. Electron. 2020, 67, 10253–10265. [Google Scholar] [CrossRef]
- He, L.; Xu, X. Novel High-Efficiency Frequency-Variable Buck–Boost AC–AC Converter with Safe-Commutation and Continuous Current. IEEE Trans. Power Electron. 2020, 35, 13225–13238. [Google Scholar] [CrossRef]
- Ashraf, N.; Izhar, T.; Abbas, G.; Balas, V.E.; Balas, M.M.; Lin, T.C.; Asad, M.U.; Farooq, U.; Gu, J. A Single-Phase Buck and Boost AC-to-AC Converter with Bipolar Voltage Gain: Analysis, Design, and Implementation. Energies 2019, 12, 1376. [Google Scholar] [CrossRef] [Green Version]
- Ashraf, N.; Abbas, G.; Abbassi, R.; Jerbi, H. Power quality analysis of the output voltage of AC voltage and frequency controllers realized with various voltage control techniques. Appl. Sci. 2021, 11, 538. [Google Scholar] [CrossRef]
- Ashraf, N.; Abbas, G.; Ullah, N.; Al-Ahmadi, A.A.; Raza, A.; Farooq, U.; Jamil, M. Investigation of the Power Quality Concerns of Input Current in Single-Phase Frequency Step-Down Converter. Appl. Sci. 2022, 12, 3663. [Google Scholar] [CrossRef]
- Kumar, A.; Sadhu, P.K.; Mohanta, D.K.; Reddy, M.J.B. An effective switching algorithm for single phase matrix converter in induction heating applications. Electronics 2018, 7, 149. [Google Scholar] [CrossRef] [Green Version]
- Mondol, M.H.; Uddin, M.S.; Hossain, E.; Biswas, S.P. A Compact and Cost Efficient Multiconverter for Multipurpose Applications. IEEE Access 2020, 8, 86810–86823. [Google Scholar] [CrossRef]
- Ashraf, N.; Abbas, G.; Khan, I.; Raza, A.; Ullah, N. A Transformer-Less Multiconverter Having Output Voltage and Frequency Regulation Characteristics, Employed with Simple Switching Algorithms. Appl. Sci. 2021, 11, 3075. [Google Scholar] [CrossRef]
- Fayek, T.I.H.H.; Rusu, E.; Rahman, F. Triac Based Novel Single Phase Step-Down Cycloconverter with Reduced THDs for Variable Speed Applications. Appl. Sci. 2021, 11, 8688. [Google Scholar]
- Uddin, M.; Biswas, S.P.; Islam, M.R.; Anower, M.S.; Kouzani, A.Z.; Mahmud, M.A. A new generalized step-down single-stage AC/AC power converter. Sustainability 2020, 12, 9181. [Google Scholar] [CrossRef]
- Ashraf, N.; Abbas, G.; Ullah, N.; Al-Ahmadi, A.A.; Yasin, A.R.; Awan, A.B.; Jamil, M. A Transformerless AC-AC Converter with Improved Power Quality Employed to Step-Down Power Frequency at Output. Energies 2022, 15, 667. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, C.; Chen, D. A Single-Stage Wireless Power Transfer Converter with Hybrid Compensation Topology in AC Input. IEEE Trans. Veh. Technol. 2022, 71, 8266–8279. [Google Scholar] [CrossRef]
- Ahmed, H.F.; Cha, H.; Khan, A.A.; Kim, J.; Cho, J. A Single-Phase Buck–Boost Matrix Converter with Only Six Switches and Without Commutation Problem. IEEE Trans. Power Electron. 2017, 32, 1232–1244. [Google Scholar] [CrossRef]
- Ahmed, H.F.; el Moursi, M.S.; Zahawi, B.; Hosani, K.A. High-Efficiency Single-Phase Matrix Converter with Diverse Symmetric Bipolar Buck and Boost Operations. IEEE Trans. Power Electron. 2021, 36, 4300–4315. [Google Scholar] [CrossRef]
- Ashraf, N.; Izhar, T.; Abbas, G.; Awan, A.B.; Farooq, U.; Balas, V.E. A New Single-Phase AC Voltage Converter with Voltage Buck Characteristics for Grid Voltage Compensation. IEEE Access 2020, 8, 48886–48903. [Google Scholar] [CrossRef]
- Ashraf, N.; Abbas, G.; Ullah, N.; Alkhammash, H.I.; Zubair, M. An Improved Bipolar Voltage Boost AC Voltage Controller With Reduced Switching Transistors. IEEE Access 2021, 9, 90402–90417. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Proposed Circuit | Converter in [28] | Converter in [39] |
|---|---|---|---|
| Peak switching currents | |||
| Peak switching voltage | |||
| Number of transistors | 6 | 8 | 8 |
| Number of diodes | 6 | 8 | 8 |
| Number of gate control circuits | 6 | 8 | 8 |
| Inductor current interruption | No | No | Yes |
| Number of capacitors | 2 | 2 | 3 |
| Number of inductors | 1 | 1 | 2 |
| Directional of inductor current | Unidirectional | Unidirectional | Bidirectional |
| Conduction losses | |||
| Switching losses |
| Input Voltage | Output Voltage | Voltage Gain | Duty Ratio Control |
|---|---|---|---|
| 180 V | 50 V | 0.28 | 0.28 |
| 180 V | 80 V | 0.55 | 0.55 |
| 180 V | 200 V | 1.12 | 0.107 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ashraf, N.; Abbas, G.; Raza, A.; Ullah, N.; Mohammad, A.; Farrag, M.E. A Single-Phase Compact-Sized Matrix Converter with Symmetrical Bipolar Buck and Boost Output Voltage Control. Energies 2022, 15, 7534. https://doi.org/10.3390/en15207534
Ashraf N, Abbas G, Raza A, Ullah N, Mohammad A, Farrag ME. A Single-Phase Compact-Sized Matrix Converter with Symmetrical Bipolar Buck and Boost Output Voltage Control. Energies. 2022; 15(20):7534. https://doi.org/10.3390/en15207534
Chicago/Turabian StyleAshraf, Naveed, Ghulam Abbas, Ali Raza, Nasim Ullah, Alsharef Mohammad, and Mohamed Emad Farrag. 2022. "A Single-Phase Compact-Sized Matrix Converter with Symmetrical Bipolar Buck and Boost Output Voltage Control" Energies 15, no. 20: 7534. https://doi.org/10.3390/en15207534