1. Introduction
Microgrids are setting the trend for, and attracting attention to, constructing robust energy systems. The stochastic nature of RES requires different strategies for dynamic energy to make the grid stable. RES in conjunction with EV storage systems is becoming the most economical approach that decreases the cost of additional energy storage. This forces us to use intelligent EMSs to handle the uncertain environment [
1]. As the threshold limitations are already defined, crossing these values may collapse the grid stability [
2]. EVs’ technical enhancements and storage units may help MGs through the V2G and G2V functionalities. The control strategies of EV storage and the impacts associated with MG stability must be included in the literature [
3]. Exclusive articles and the literature have been populated in recent decades with studies on ways to coordinate EV storage [
4,
5,
6,
7] with grid dynamics related to frequency regulation [
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19]. They can be widely classified into two categories, centralized [
15,
16,
17,
18,
19] and decentralized [
8,
9,
10,
11,
12,
13,
14]. Of these strategies, only a few considered bi-directional power flow [
15,
18] and variable charge rates.
In one study, a two-stage EMS was developed in which EV fleets were scheduled in stage 1, to diminish the energy cost, and in stage 2, available EVs were planned considering technical limitations [
20]. In another study, the EVs’ trip energy requirement was fulfilled based on an EMS for an MG [
21]. On the other hand, an MG EMS in another study was implemented with the help of an EV battery for regulation services by employing the EV charging criterion [
22]. California University established an EMS using an EV battery as an additional provision in the V2G scenario by considering uncertainties in EV owner tendencies [
23]. The highlighted studies mainly focused on reducing the energy cost of MGs [
20,
24], but the EV owner benefits were not considered. For example, an EV’s battery is portable. EV charging costs negatively impact an owner’s interest in participating in MG support activities.
On the other hand, few authors have included the benefits for EV owners and battery degradation in their studies [
25]. For example, the Energy Management Strategy for a distinct house with an EV battery has reduced tariffs due to optimal charging and discharging timings [
26]. In addition, changing driving patterns reduces the MG operating cost in a multi-level EMS [
27].
EMSs with renewable energy resources have been implemented in intelligent homes using multiple EV storage units using a linear programming approach [
28], but these strategies [
26,
27,
28] have not included the effects of the implementations of G2V and V2G scenarios on the lifetime of an EV battery. Exploiting EV storage with a degraded battery disturbs effective energy management [
29]. Maximizing EV battery longevity by scheduling charging and discharging is considered intelligent energy management [
30]. A multi-stage EMS is proposed in [
31] that benefits EV owners by minimizing the cost of charging and maximizing the revenue for an EV owner during the V2G scenario with the help of scheduled charging patterns. In [
30,
31], the EMSs were not incorporated with V2G; hence, the degradations of the batteries were not considered. The EMS implemented in [
32,
33,
34,
35] considered the lifetimes of the EV batteries while aiming to diminish the energy cost. In [
32,
33], a strategy is proposed for MGs involving the integrations of RES and EVs to suppress fluctuations in wind power. Finally, a multi-agent-based EMS was proposed to reduce changes in the energy market by utilizing EV support [
34]. Photo-Voltaic (PV) generation and coordinated EVs are implemented in residential areas. Real-time pricing, the lifetime of an EV battery, and forecasted solar power were considered while implementing the EMS in [
35]. In [
36], the authors suggest an entirely distributed water-filling system among networked locally interacting users, with no centralized decision maker. The authors developed two distinct variants of a dynamic control method based on consensus, proximity, and fixed-point mapping theory. This iteratively and diffusely drives consumers’ water levels to a convergence value equivalent to the global optimum. The authors of [
37] present a novel mathematical model and a comprehensive RMPC methodology for optimally controlling the energy exchange of a multi-carrier microgrid equipped with thermal and electrical units, specifically, thermal loads, renewable energy sources, electrical loads, energy storage systems, and combined heat and power units. The authors of [
38] present a multi-objective and collaborative approach for MMG energy management in distribution networks. In this collaborative paradigm, the MMG attempts to reduce the total cost of the MMG and its reliance on the upstream network. In this study, the uncertainties of renewable energy sources are analyzed.
Furthermore, the effect of MMG independence from the main grid on reliability and greenhouse gas emissions has been studied. The authors of [
39] provide a unique approach for determining a Nash equilibrium by concurrently updating each PEV’s optimum strategy based on the average charging strategy of the whole population. This operation is proposed to be carried out before the actual charging interval.
Extensive research has been conducted in the current literature on the feasibility of using EV storage for MG auxiliary services. The importance of EV storage in V2G applications has been studied in the existing literature. V2G deploys smaller quantities of storage capacity at the demand point, directly serving the customer/industry/organization and reducing the need for a future extension of a transmission and distribution grid that must meet the peak load demand; hence, this offers a better provision at a reasonable price and has the added benefits of being environmentally friendly. The interconnection between EVs and the grid is sometimes referred to as distributed energy storage. However, in real-time, simultaneous solutions with multiple constraints are becoming mandatory. This article suggests an innovative EMS for EVs in a practical MG scenario with various energy sources.
The following are significant research gaps in existing studies on EV storage exploitation:
- ✓
Techno-economic factors have not been adequately addressed for when EVs participate in auxiliary services of MGs and other scenarios.
- ✓
With many MG objectives such as grid dependability, power quality, EV battery deterioration, energy cost, and so on, comprehensive solutions have not been achieved.
- ✓
According to the literature, EV battery deterioration due to additional assistance to MGs has not been explored, taking into account all of the variables affecting the escalation of degradation.
- ✓
The maximization of EV storage utilization, taking into account all techno-economic variables, has yet to be achieved in the current literature.
The following are some of the critical features of the proposed EMS:
- ▪
Setting the OSD limit using the Water-Filling Algorithm.
- ▪
Recognizing the possibility of EV exploitation for MG support in upcoming time zones.
- ▪
Assigning ranks (EVS) to EVs using an FLC for the intelligent selection of EVs.
The key novelty aspects of the proposed EMS are:
- ▪
An EV battery can be used at its highest level by considering the battery lifetime, and by obeying the MG codes’ transformer burden, the energy cost is concurrently decreased.
- ▪
While exploiting the EV battery to a maximum extent, battery fading is possible and expressed in terms of DoD (Depth of Discharge) and SoC (State of Charge).
- ▪
Voltage regulation, peak shaving, and valley filling are executed while diminishing the energy cost of the organization.
- ▪
An optimal distribution of energy and power is achieved during the time scale.
- ▪
The charging station (CS) operator easily handles techno-economic objectives.
- ▪
An innovative EV prioritization model is established with the help of ANFIS with several input parameters.
- ▪
An advanced probabilistic methodology is implemented to obtain the approximations of EV exploitation for forthcoming zones, enhancing the process of EV ranking.
The categorization of the remaining article is as follows: In continuation to
Section 1,
Section 2 describes the proposed scenario and EMS,
Section 3 deals with EV modeling and energy economics, and
Section 4 explains optimal EV storage usage. Finally, this article deals with prioritization strategies for EVs in
Section 5.
5. Prioritization Strategy for EVs
The prioritization of EVs is critical for extending battery life, and the maximum amount of EV battery is utilized for V2G scenarios. Prioritization creates a win-win situation for both MG operators and EV owners, resulting in a more significant number of EV owners willing to participate in V2G. This section provides an in-depth demonstration of the EV Selection process. The EV Selection was executed with the help of ANFIS, which was trained with the MG operator’s decision-making capabilities for ranking. SoC, DoD, Laxity, and EUP were the decision variables in the EV Selection process. Decision variable mapping helps in the preparation of training data, and among all these variables, the usage probability (EUP) of an EV was estimated with a probabilistic approach.
5.1. EUP, Probabilistic Approach
The most efficient way to maintain an EV battery is to keep its SoC range between 0.2 and 0.8, and it is advised to avoid deep discharge and overcharge to improve its lifetime. Moreover, continuous changeovers between V2G and G2V are not recommended to prevent EV battery degradation. Here, a battery with peak SoC was used first to serve as V2G support to exploit maximum energy from the EV battery. From this point of view, this study presents an innovative EV ranking system that considers the exploitation of an EV battery and degradation factors concurrently, and this helps in the forecasting of EV battery usage in the forthcoming time intervals in the G2V and V2G scenarios. With this perspective, a new probability theory is presented to forecast the EV transition from G2V to V2G, and vice-versa, with the help of the STP ().
The EVs are intended to participate in the V2G scenario with their probabilities of state transitions (STPs) at various instants of time, as depicted in
Figure 3, and the corresponding likelihoods of zone transitions (ZTPs) are also presented in
Table 2. The substantial ZTPs are key terms for finding the corresponding STPs.
is the vector representation of the ZTPs, based on the estimated energy need for peak shaving and valley filling; these ZTPs are attained, as represented in
Figure 4 and
Table 3, and formulated, as represented by Equation (47).
Here, = kth interval from the RHS to LHS, and is the no. of intervals in zone Z.
The Laxity,
, and SoC of each of the available EVs help to determine the possible state transition in zone ‘Z’. Equation (48) produces the chance of state transition from V2G to V2G at an instant of
. The possible outcomes of STP are represented by Equations (49)–(53) and shown in
Figure 5:
where
is the change in SoC.
If the EV is in the G2V mode, which means the upcoming zone is V2G, then
If the EV is in the V2G mode,
If the EV is in the G2V mode,
If the EV is in the V2G mode,
If the EV is in the V2G mode, (1 − SoC) is the key factor in the state transition and is represented by Equation (58), and a contradiction to this is the situation represented in Equation (59):
The possible zone transition (ZTP) of an EV in the forthcoming intervals from any of the state transitions (STPs) is represented by Equations (60)–(62). Here,
:
5.2. EV Selection Using Anfis
ANFIS was developed in 1990 by Jyh-Shing and Roger Jang (Jang et al., 1995) and is a combination of an Artificial Neural Network (ANN) and Fuzzy Logic System [
39]. ANFIS utilizes the learning ability of ANN to achieve the desired output. Depending upon the training data characteristics, ANN can assign a ranking. In this article, the data for training were prepared by the manual mapping of the four decision variables. A Sugeno-Type Fuzzy Inference System was used in this study, with five input and one output membership functions. The i/p and o/p values were converted into p.u values.
5.3. Training Data and EV Ranking
As previously mentioned, a training data set was organized by mapping four i/p parameters with the single o/p (rank). It was carried out by splitting the training data set into two sets of data with two i/p and one o/p, as shown in
Table 4. The final ranking among the available EVs is obtained from the aggregate rank from the two stages of selecting EVs. It includes all four decision variables simultaneously with equal weightage. The training data fed to ANFIS is shown in
Table 5. The performance of ANFIS can be observed in
Table 6, which shows the final ranking for 13 EVs.
Table 6 presents the execution of ANFIS (discharging case). The way mapping that was carried out can be understood in
Table 4. In this study, decision parameters were mapped together only for the discharging scenarios, and the same technique can also be implemented for the charging cases. While training and mapping four decision variables simultaneously, there may be a chance of misinterpretation in the ranking system among the available EVs.
Only two variables were considered while training to overcome this difficulty, and the remaining parameters were considered in the next stage. In stage one, parameters favoring the CS were considered, while in the second stage, parameters favoring the EV owner were considered. The final rank of EVs was obtained from the aggregate of stages one and two. In the V2G scenario, both the EV owner and CS benefitted equally from this prioritization model’s help. Profits attained by EV owners through their contribution to grid support are a key factor that encourages EV owners to participate in grid support. Because of customer revenue maximization, it would be more economical for an EV to charge during time zones with lower electricity prices. Prioritizing EVs while using them for grid support is an important task to maximize the exploitation of an EV’s storage without inconveniencing the customer. Therefore, the EV Selection was based on their final ranks while participating in grid ancillary services.
6. Results and Discussions
The proposed MGEMS is implemented in a grid-tied MG (an educational organization), accompanying the PV generation, DGs, EVs, CS, and load, as shown in
Figure 6. The simulation setup is taken from DiSC programming [
44]. To investigate the benefits and impacts due to the reduction in maximum grid power intake (maximum demand
), three cases were considered:
Case A—450 kW Dmax,
Case B—400 kW Dmax,
Case C—350 kW Dmax.
The influence of the OPU, OSD, and ranking on the below-mentioned cases was analyzed (with ).
CASE 0—without proposed strategy,
CASE I—proposed scenario,
CASE II–excluding OSD,
CASE III—excluding EV ranking,
CASE IV—excluding Laxity and %SoC,
CASE V—excluding EUP and %DoD.
6.1. Energy Cost
The intelligent management of EV demand addresses an enhancement in the flexibility of power systems and reduces the costs of power system investment. The optimal grid authenticated power was not investigated; instead, random values were considered (450 kW, 400 kW, and 350 kW). For case B, the total energy cost was evaluated using Equation (17), per month. The impact of the proposed EMS was compared with other cases: CASE (II) and CASE (III). There is a chance of a significant increase in
during load flattening due to the absence of prioritization and OSD, which may cause additional power usage from the grid, resulting in a penalty for the excess usage. This is shown in
Figure 7, which compares all four different scenarios.
reduces significantly with the proposed scenario, and for the three different cases, it is diminished by 12%, 14%, and 16%, respectively. Comparing the functionalities of the OSD with EVS, both of them play almost similar roles in terms of showing the impact on
. EV storage exploitation to the maximum extent for ΔP and the lifetime improvement of the battery were the objectives of the ANFIS prioritization. OSD is not biased toward another object but aims to minimize ΔP. Consequently, there is a slightly higher impact on ΔP minimization by the OSD compared with the EVS. Compared with the ANFIS prioritization, the OSD is better at minimizing ΔP, since it is independent of any other parameters.
The role of a decision variable in the EV Selection process using ELC. is depicted in
Figure 8. The exploitation of EV batteries is at a maximum when Laxity and SoC are considered decision parameters, which favors utility operators. DoD and EUP help minimize battery degradation (EV favor). It can be observed from
Figure 8 that the MG perspective (CASE-V) may reduce the
at maximum level, when compared with CASE-I, the proposed EMS. The battery degradation was not considered due to the absence of the decision variables DoD and EUP. The reduction in
for CASE-V, compared with CASE-IV, is 9%, 12%, and 13.5% in cases A, B, and C, respectively. However, the win-win situation is always preferable (CASE-I), as it benefits EV owners while participating in grid ancillary services, without losing the state of health (SoH). In addition, there is a remarkable difference in
between CASE-IV and CASE-V, with values estimated as 8.5%, 11.7%, and 12.5% in cases A, B, and C, respectively. The FLC decision is biased with a one-sided benefit, i.e., toward MG (CASE-V) or EV (CASE-IV).
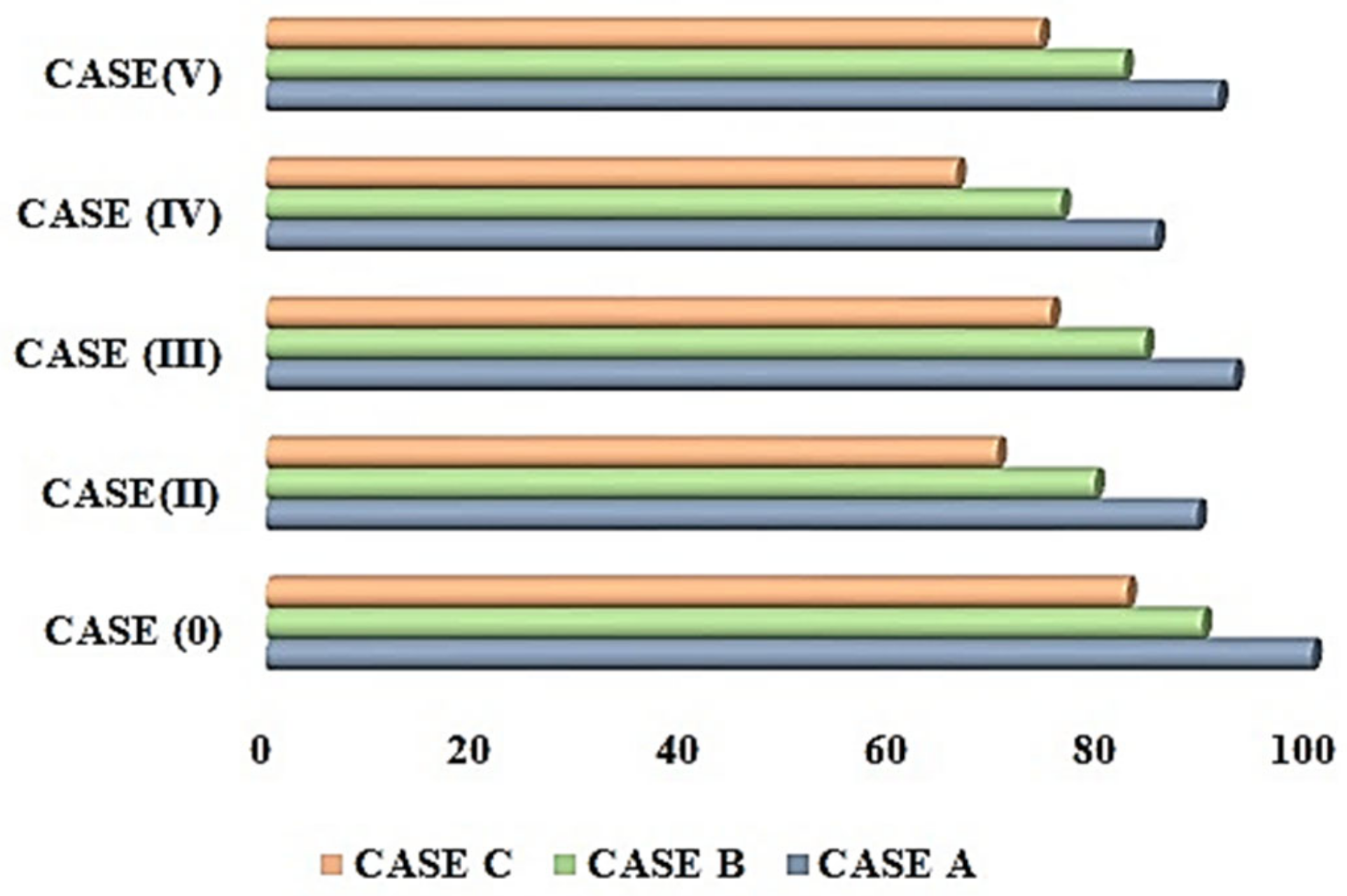
6.2. Deviation in Power (ΔP)
The recommended EMS efficacy was examined using
, which may not be the ideal amount of grid power needed. The cases mentioned earlier, from CASE-I to -V, are compared in
Figure 9. The case without a proposed EMS is taken as the base case, and the remaining cases are illustrated. CASE-V is potentially the best of all, when
and ΔP are taken into consideration. This is because this case is purely MG - favored, and it has a clear negative impact on ΔSoC, as depicted in
Figure 10. On the other hand, CASE-III and IV have slight variations in their influence on the value of ΔP, as either of these studies leads to an ineffective way of using an EV battery. The statistical comparison is depicted in
Figure 10 (comparison of mean and variability) and
Figure 11 (standard deviation) for a better understanding. It is desirable to retain the grid intake power to the greatest extent feasible, to 450 kW or even less.
Section 3 explains that exceeding the maximum demand leads to additional charges. It should be noted that the over-reduction in maximum demand from the grid (
) is not preferable as it demands numerous dedicated storage units apart from the EVs. In this article, the optimal value of
was not evaluated. Instead, it was considered randomly, and the implications are studied as reported in cases A, B, and C. From
Figure 10, it can be observed that CASE-V is the best of all cases, with its mean value near to 410 kW. CASE-I is the second-best, with a mean value of 425 kW. Finally, CASE-II is the undesirable one, with a mean value of around 465 kW, after which CASE-III and -IV follow, with 435 and 440 kW as their mean values. The same can be observed in
Figure 11, where the standard deviations are shown for all the cases.
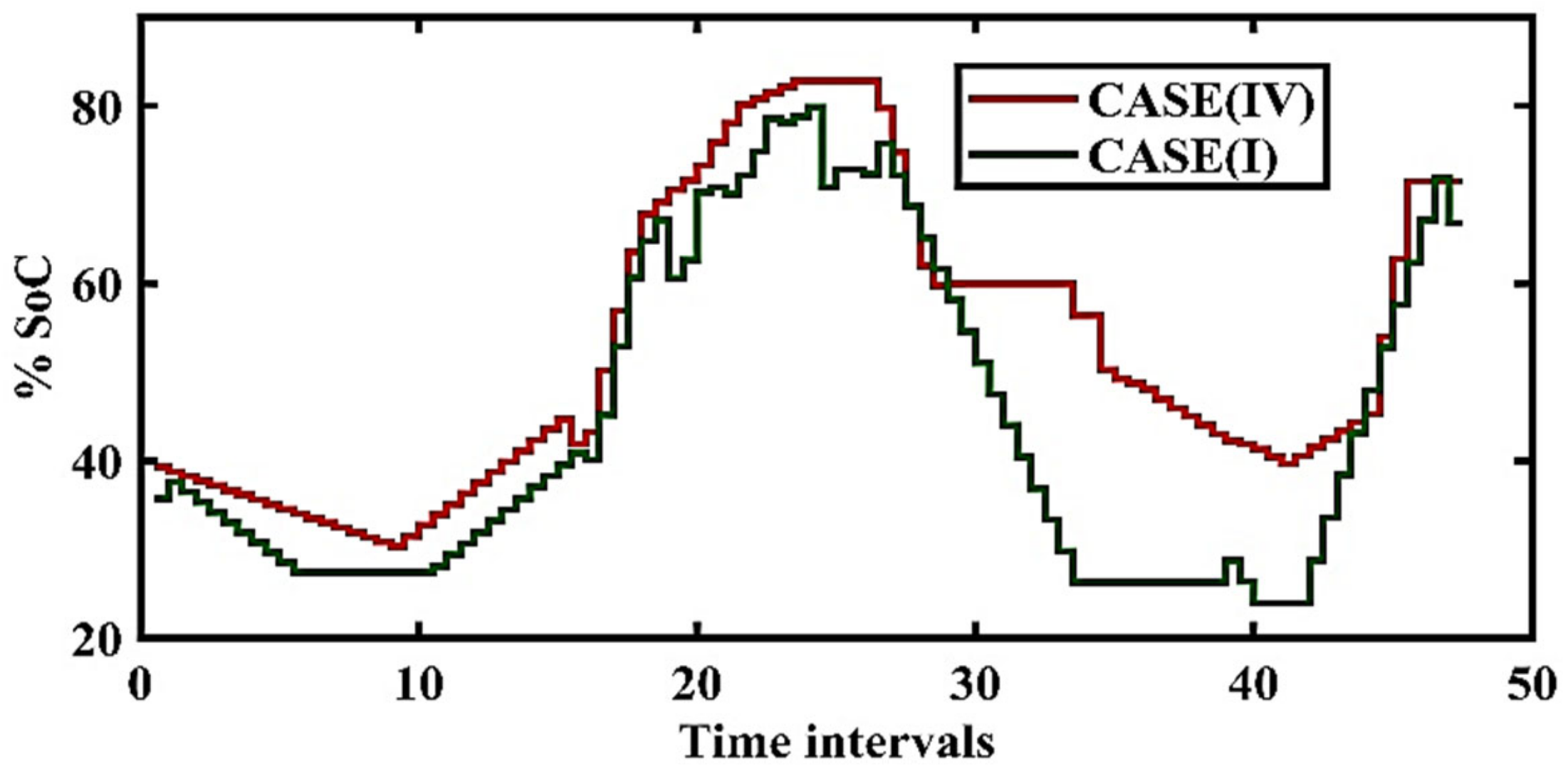
6.3. Impact of EV Ranking
In this section, different aspects of the EVS are investigated in terms of ΔP, the energy from each EV (SoC), and the power available from all EVs (APA). In addition, the individual impacts of the decision variables during the EV ranking are presented by comparing different cases. As mentioned in
Section 2, SoC levels should be maintained within the moderate range. Considering DoD and EUP as decision variables in the EV ranking process helps achieve the desired SoC profile. However, CASE-IV is purely an EV perspective that benefits battery longevity.
On the contrary, the same case works against the MG’s perspective, whereas CASE-V favors fleet operators, and SoC values are not maintained as desirable. The SoC variations are depicted in
Figure 12, where the proposed scenario CASE-I and the scenario that favors EVs, i.e., CASE-IV, are compared, and in
Figure 13 the proposed scenario and scenario which favors fleet operators are compared. The statistical representation of the mean and its variability of the SoC profile is presented in
Figure 14. Here, CASE-II is not considered, as the absence of OSD will not impact the SoC profile. The mean SoC is around 48% for CASE-IV, with a variability between 40% and 60%, which dominates over CASE-I, with a 47% SoC and a variability between 60% and 70%. CASE-III has a 60% mean SoC, with a variability range between 40% and 80%. Since CASE-V ignores EUP and DoD as decision parameters, it is the worst among all the cases, with a 37% SoC and a variability between 28% and 65%. The APA shows a direct impact on valley filling/peak shaving at any time interval. Maximum EV battery can be exploited while considering Laxity and SoC as decision parameters in the ANFIS ranking system, i.e., CASE-V, which favors fleet operators.
On the contrary, CASE-IV leads to a lower APA, and a proportional impact on load flattening (min, ΔP) can be observed in
Figure 15. In contrast,
Figure 14 contradicts
Figure 15 and
Figure 16, where CASE-I is exceptional and favors both EVs and utility. Transacted power between EVs and the CS creates a similar influence.
Table 7 Demonstrates the Comparative analysis of various cases of different parameters.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}