
A Particle Swarm Optimization Technique Tuned TID Controller for Frequency and Voltage Regulation with Penetration of Electric Vehicles and Distributed Generations




Abstract
:1. Introduction
- The application of TID controllers with parameters optimized using the PSO technique has not been reported till date to deal with the AGC and/or AVR problem;
- The performance of a TID controller is yet to be tested in the presence of distributed generations (DGs) to suppress the system dynamics;
- The effect of non-linearities in the presence of a PSO-tuned TID controller on system dynamics requires investigation;
- The insensitivity of TID controllers to frequency-sensitive loads is yet to be studied; and
- The time-delay effect on the system performance in the presence of a PSO-based TID is requires further study.
- i.
- To study the comparative performance of PID and TID controllers to determine which is superior, considering the following test systems, the parameters of which are optimized using the PSO technique:
- a. Only AGC b. Only AVR c. A combination of AGC and AVR;
- ii.
- To demonstrate the efficiency of a TID controller for higher, and randomized disturbances;
- iii.
- To address the effect of TID controller in the presence of various non-linearities, such as GDB, GRC, and RT;
- iv.
- To study the communication delay effect in the presence of PID and TID controllers;
- v.
- To address the superiority of TID controllers with non-linearities and time delays;
- vi.
- To compare the stability of PSO-tuned PID and TID controllers;
- vii.
- To verify the robustness of TID controllers to variations in damping factor (D) and time constants of AVR systems; and
- viii.
- To validate the obtained simulation results using an OPAL RT 4510 real-time digital simulator.
2. System under Study
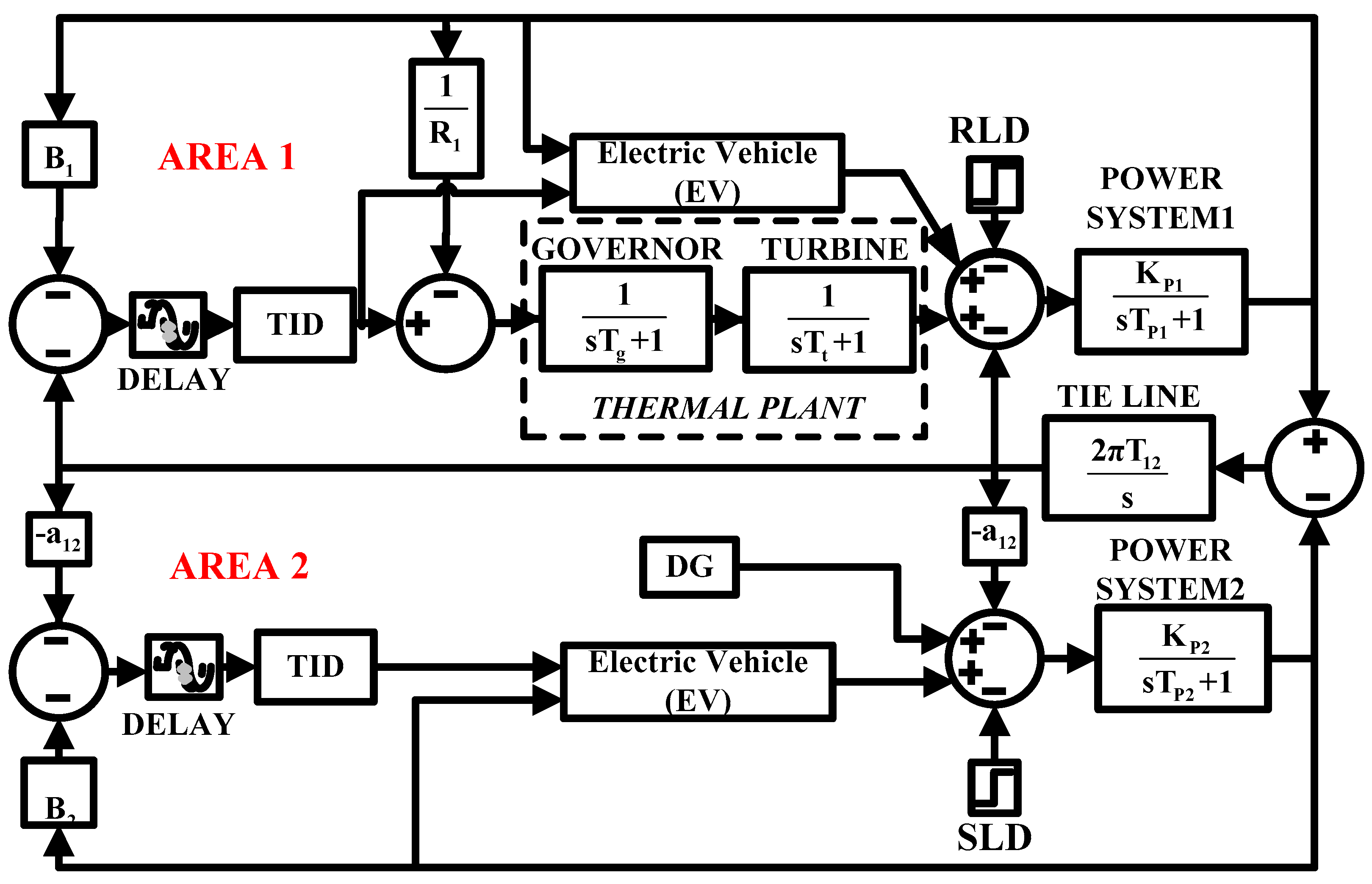
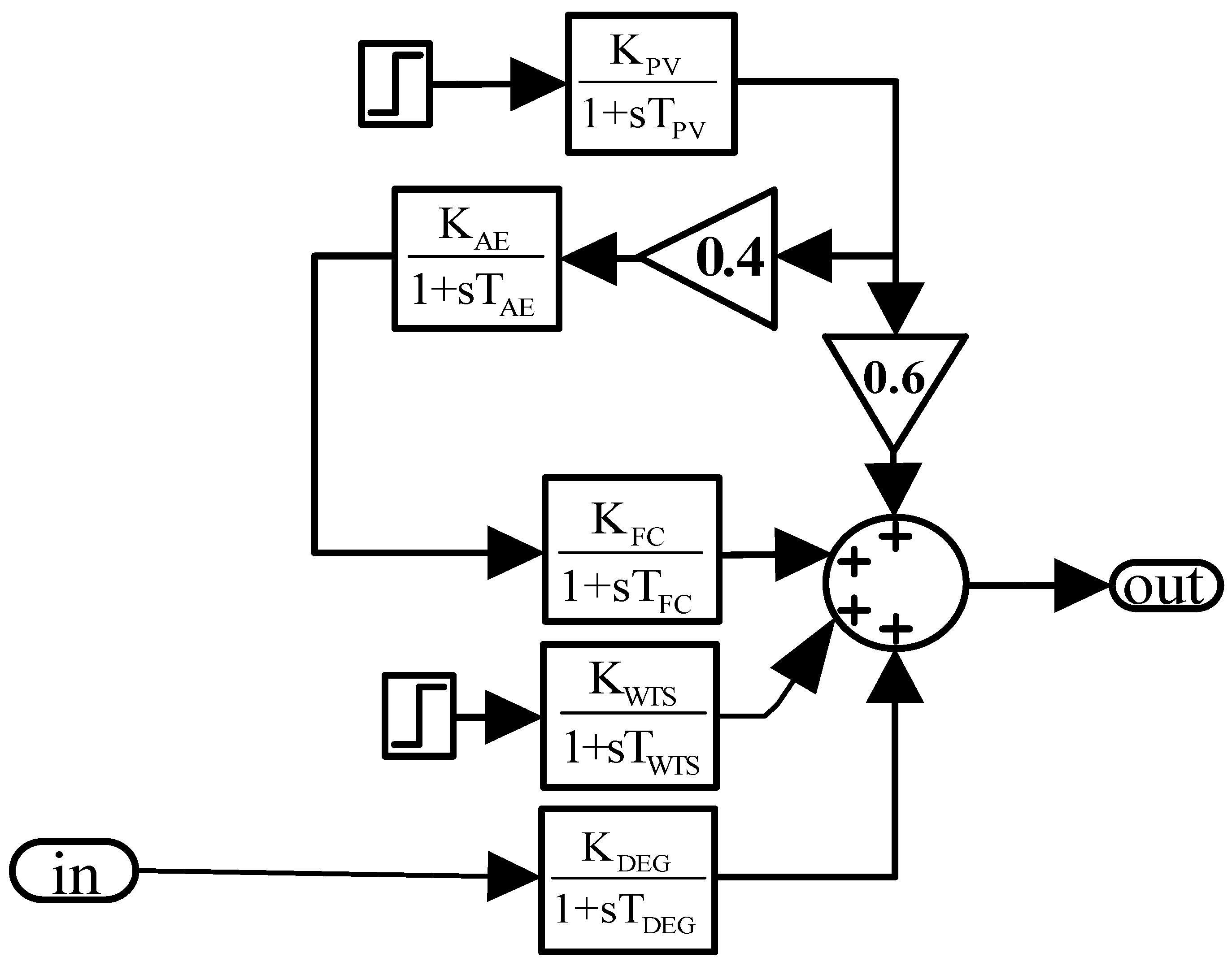
2.1. First Test System (FTS)
2.1.1. Photovoltaic (PV) System
2.1.2. Aqua Electrolyzer (AE) and Fuel Cell (FC)
2.1.3. Wind Turbine Sources (WTS)
2.1.4. Diesel Engine Generators (DEGs)
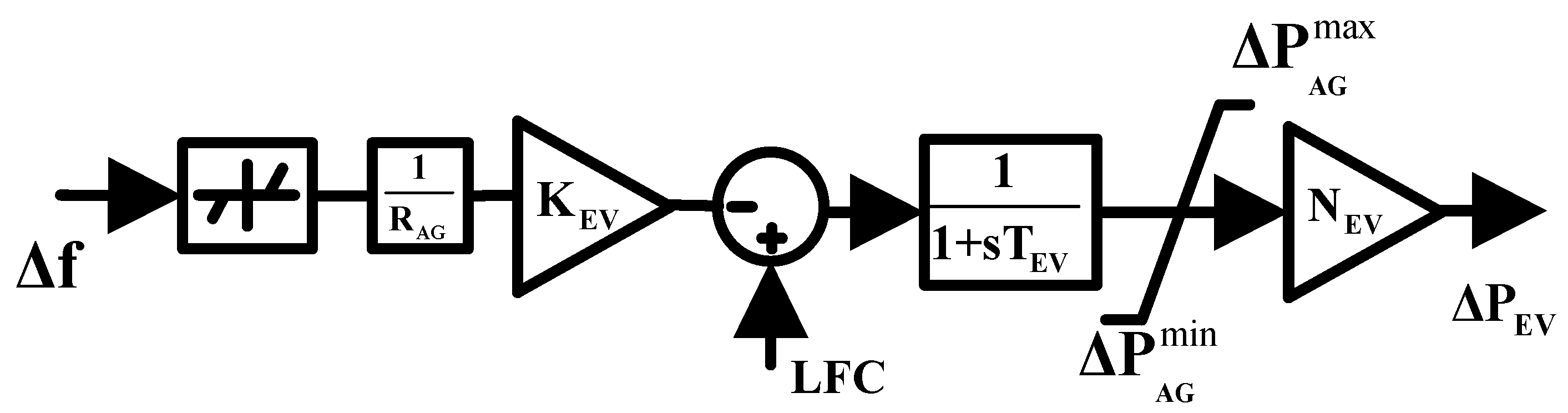
2.1.5. Electric Vehicle
2.2. Second Test System (STS)
2.3. Third Test System (TTS)
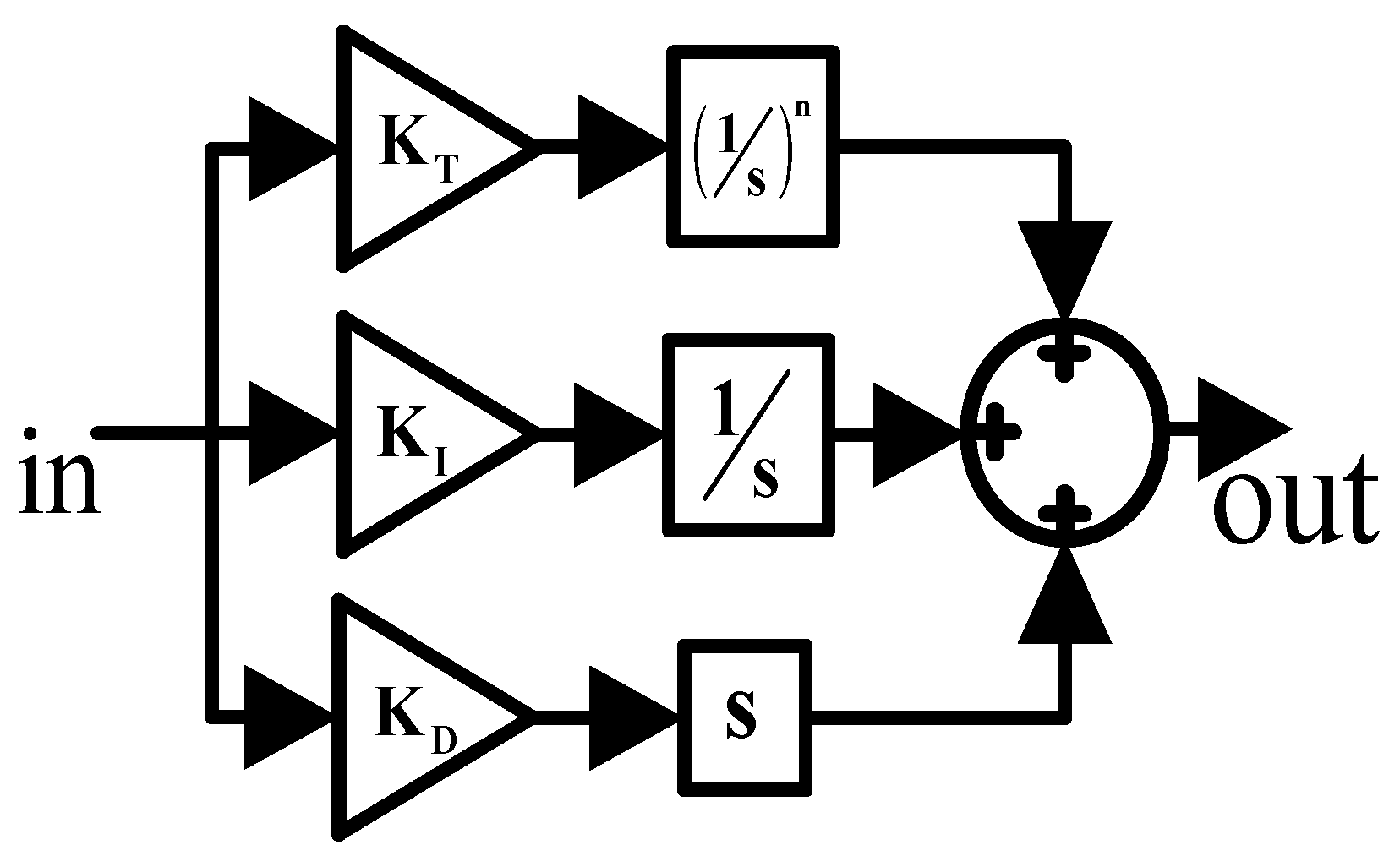
3. Controllers
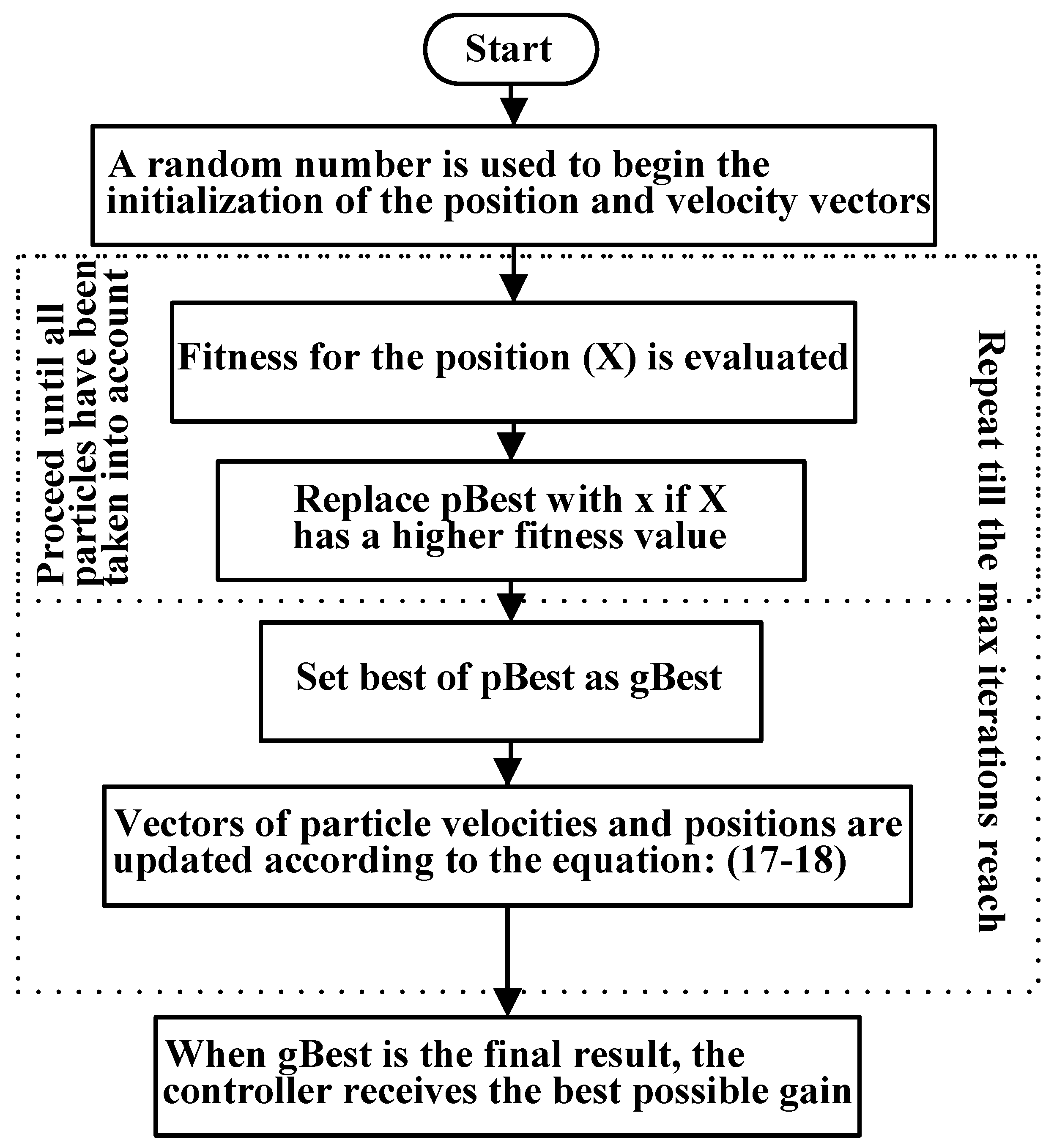
4. Particle Swarm Optimization
5. Results and Discussion
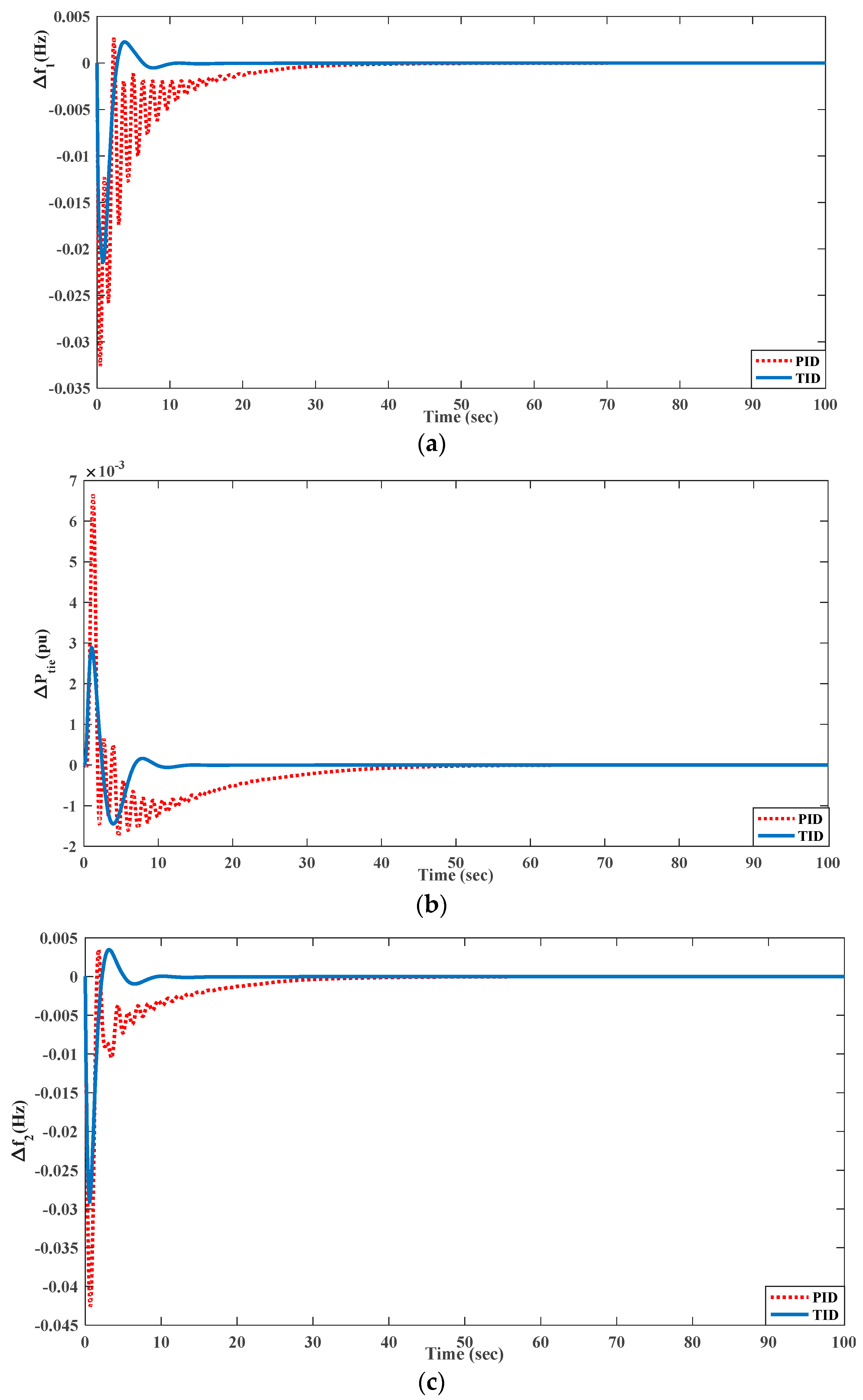
5.1. First Test System (AGC)
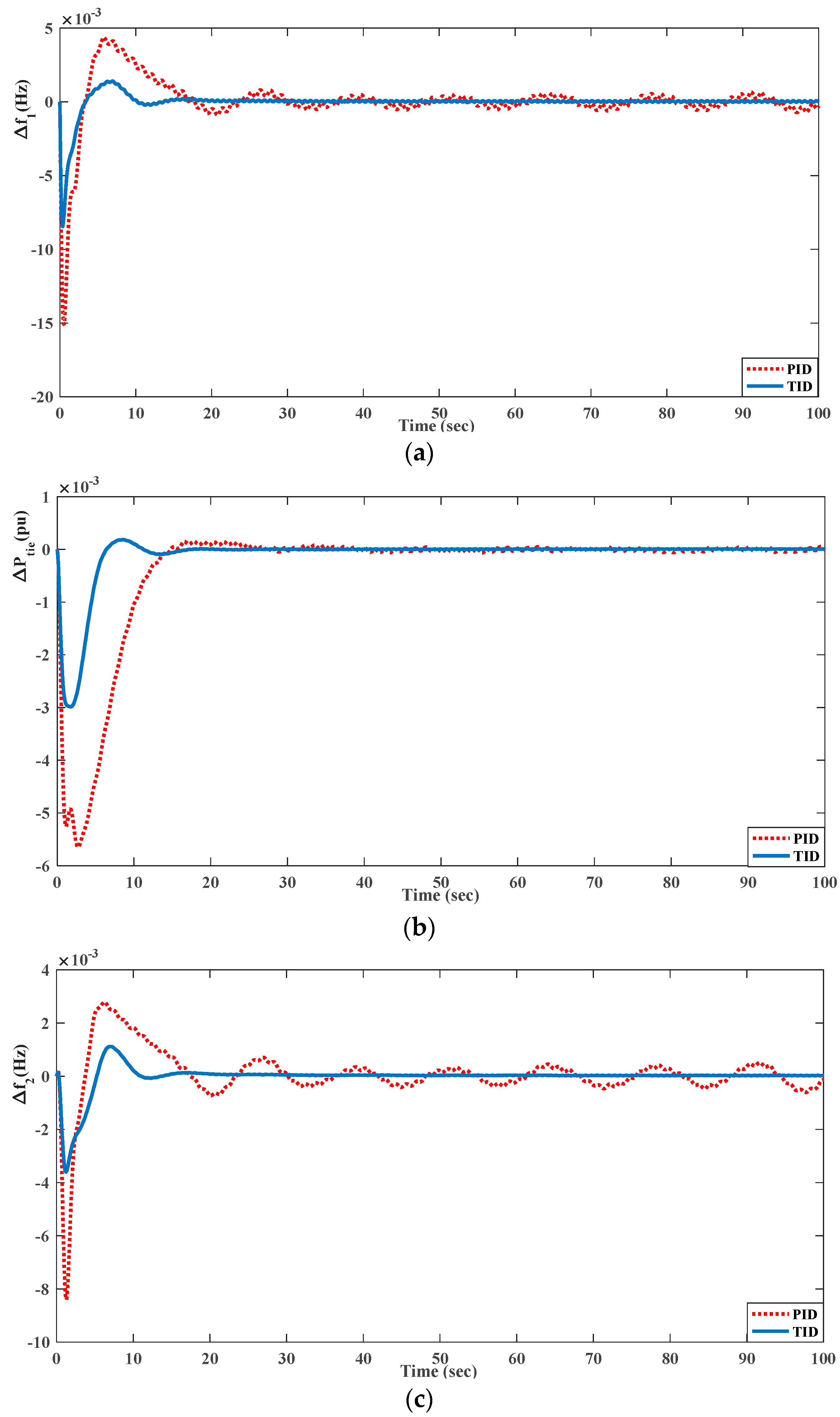
5.1.1. With 1% SLD in Both Areas
5.1.2. Comparative Performance of GA, ACO, and PSO
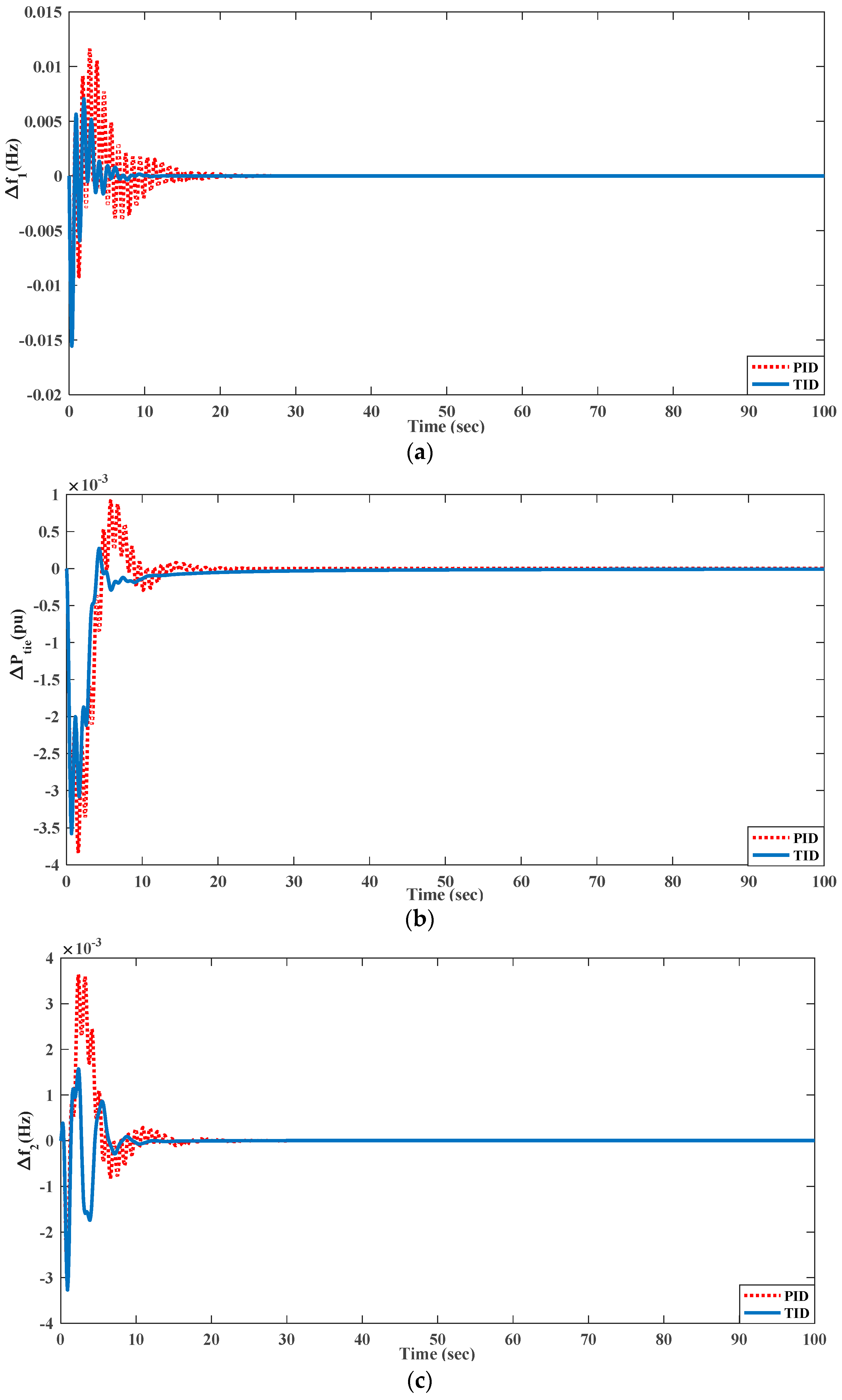
5.1.3. With 2% SLD in Both Areas
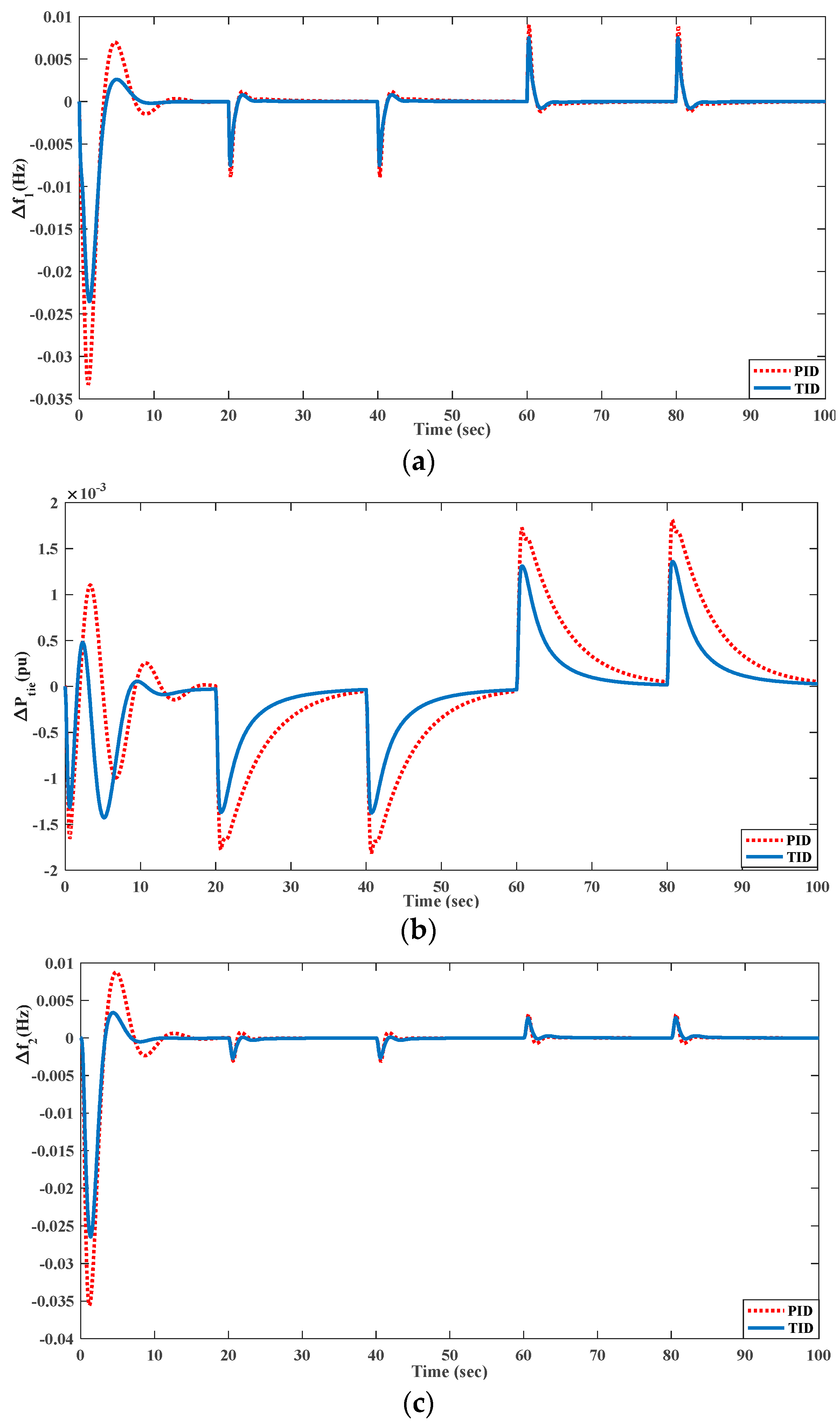
5.1.4. Randomized Load Pattern
5.1.5. With Non-Linearities
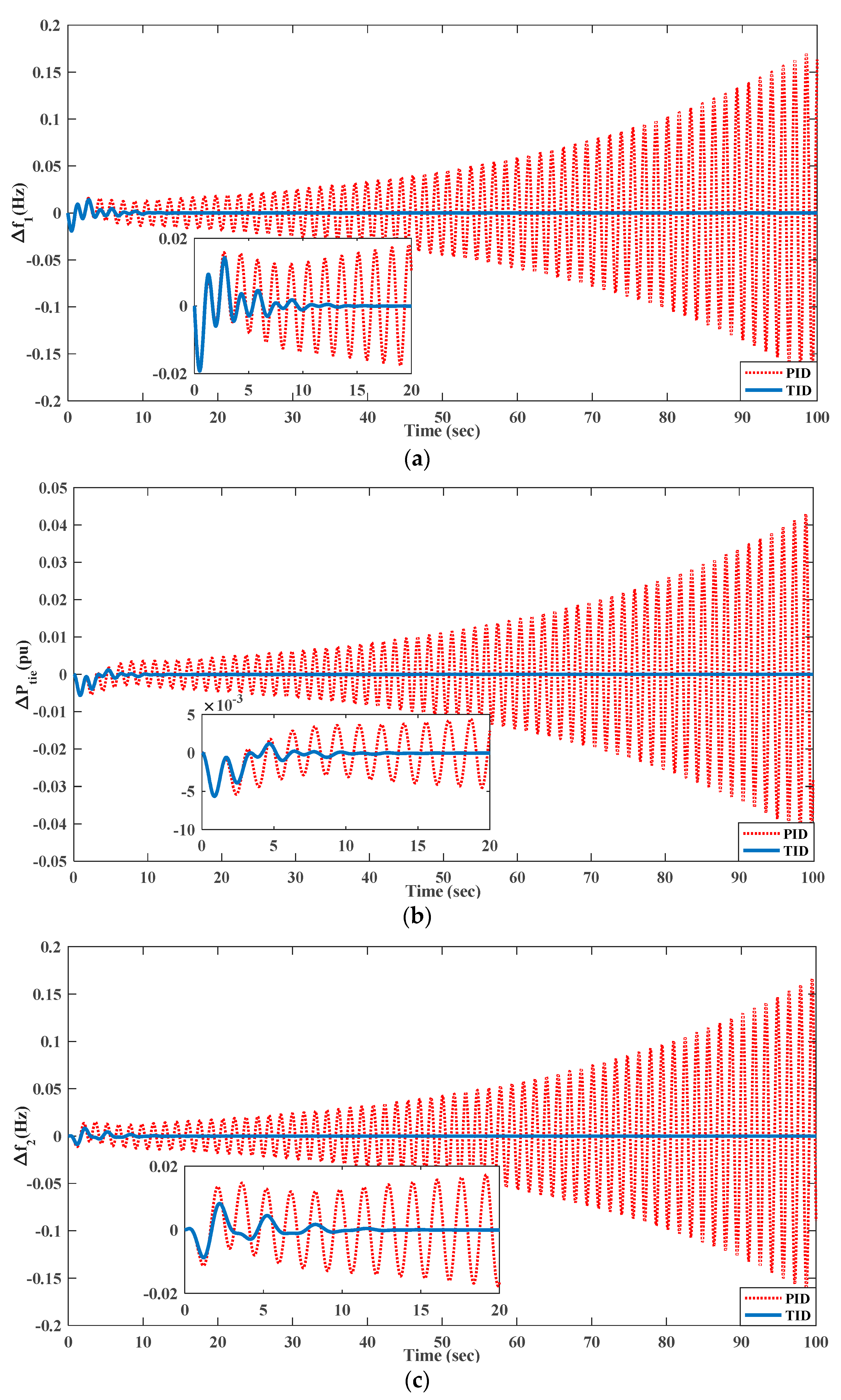
5.1.6. With Time Delays
5.2. Second Test System (AVR)
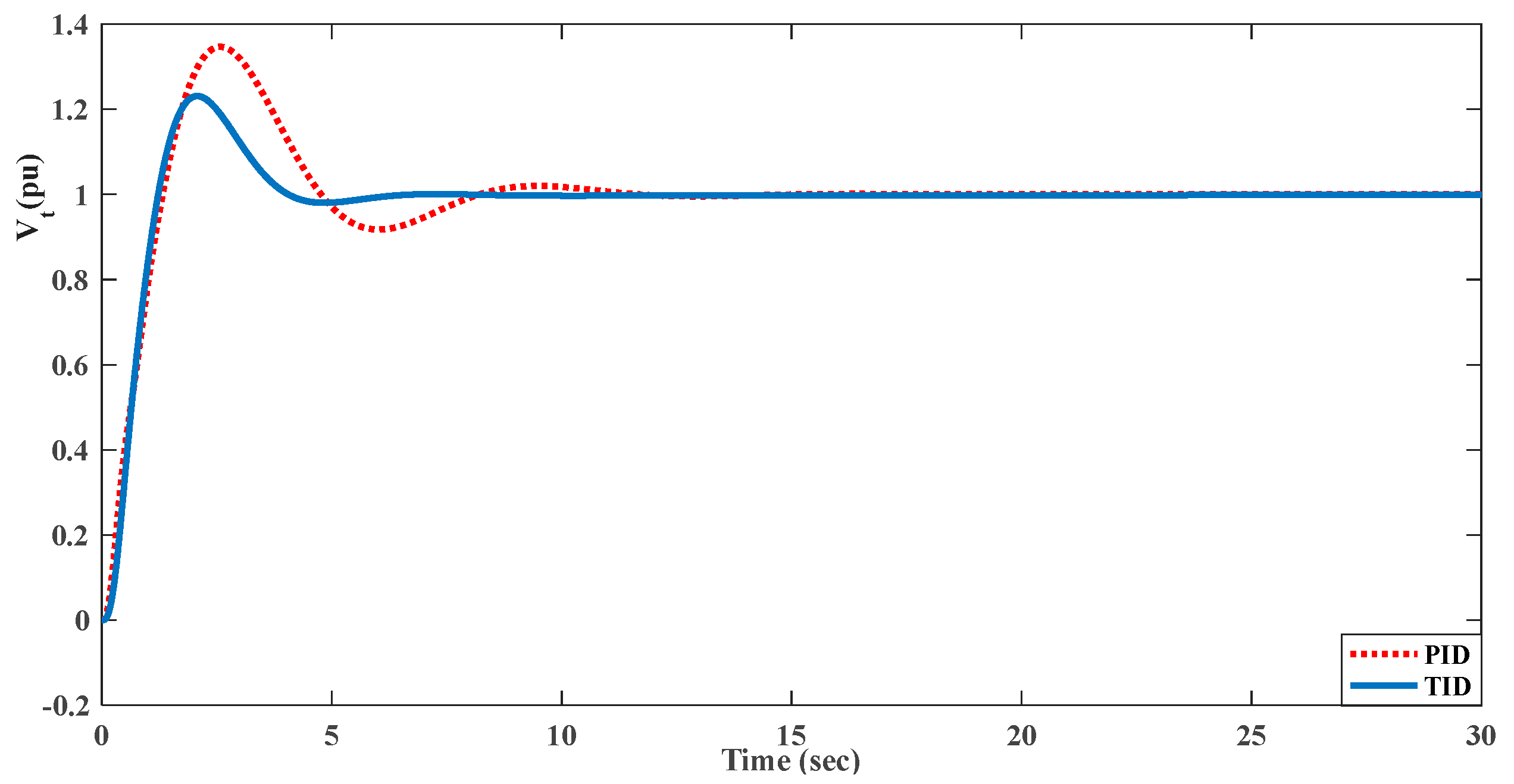
5.2.1. Time Domain Analysis of AVR
5.2.2. Frequency Domain Analysis through Bode Plot
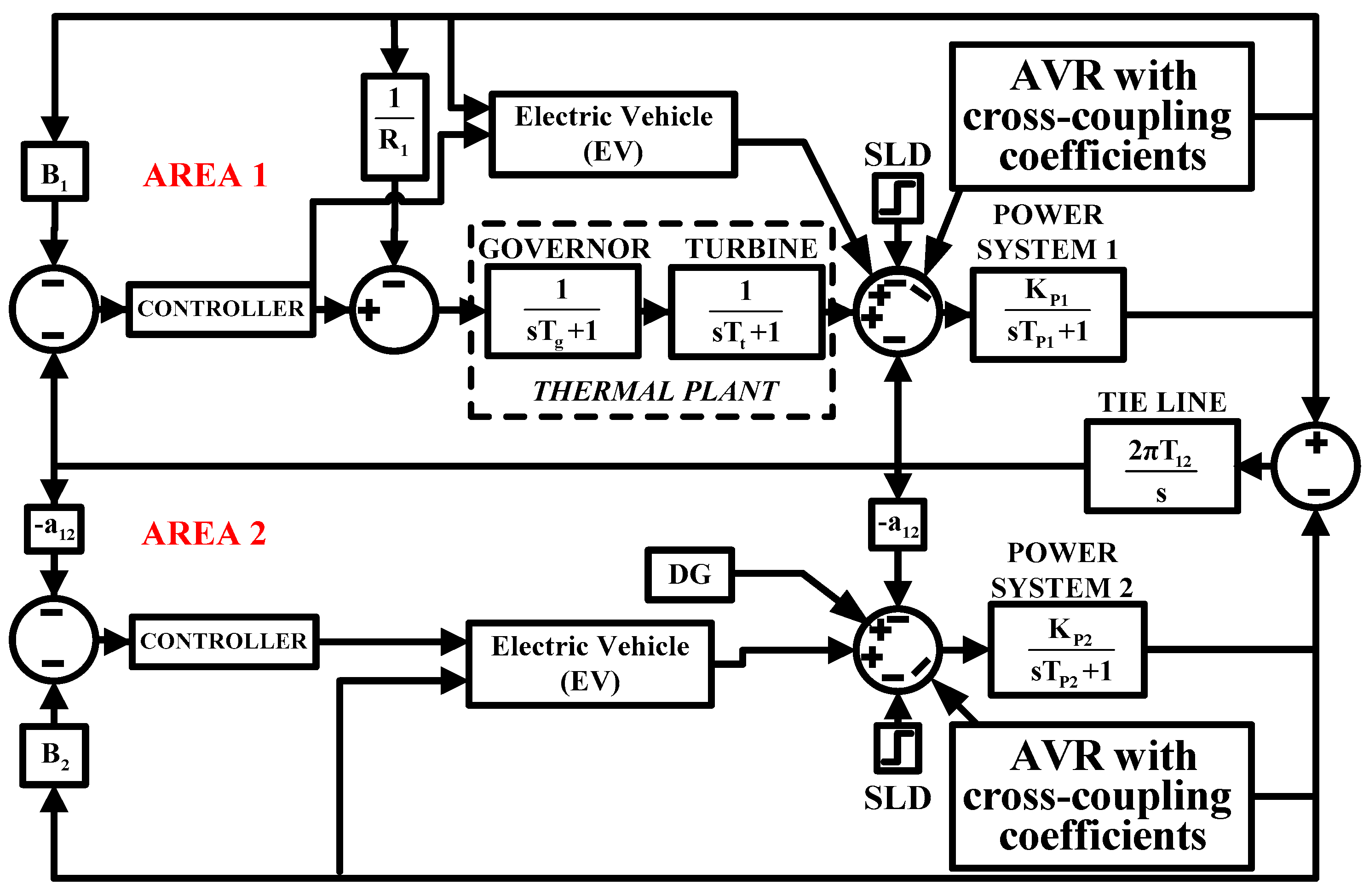
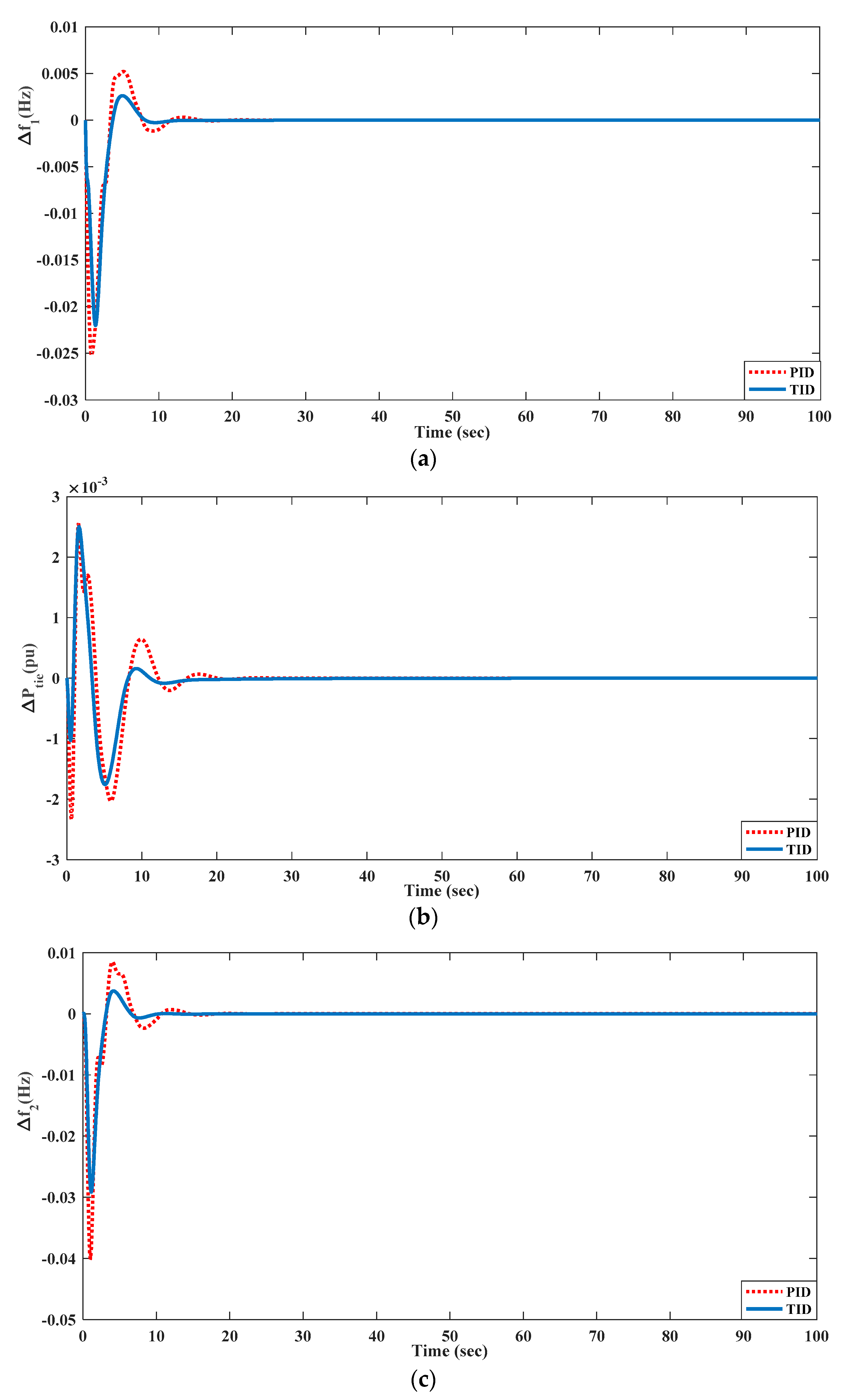
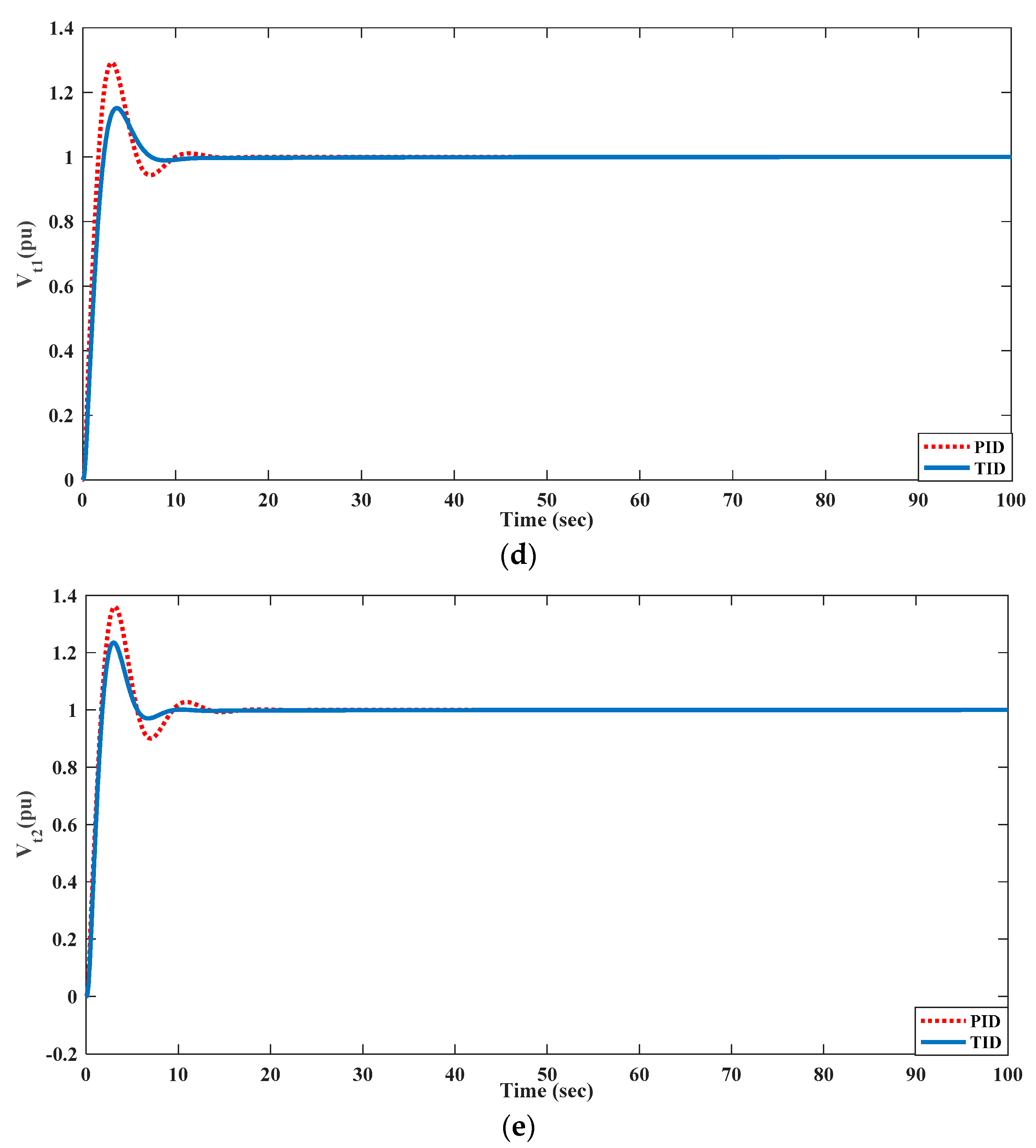
5.3. Third Test System (Combination of AGC and AVR)
5.3.1. With Step Load Disturbance
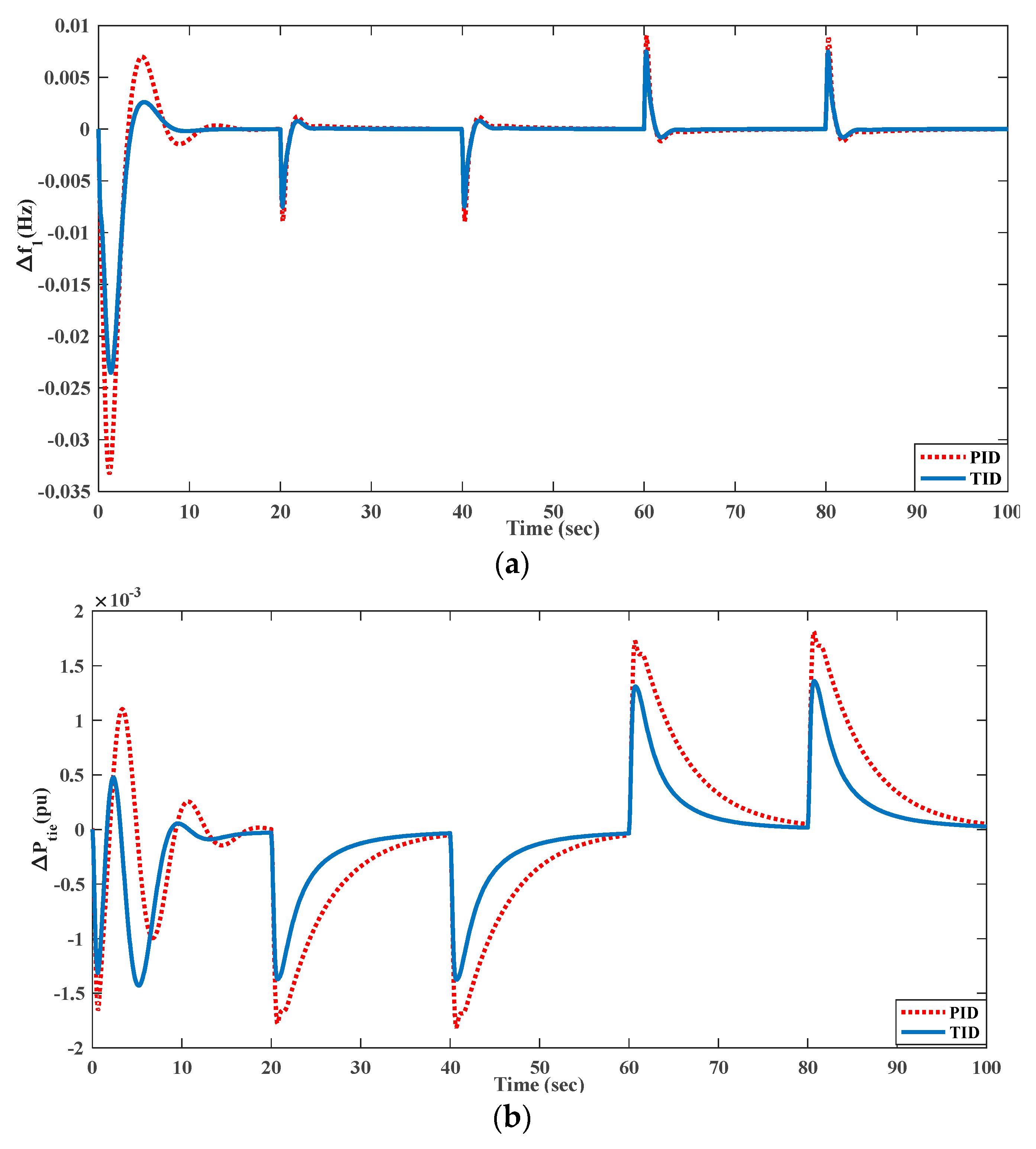
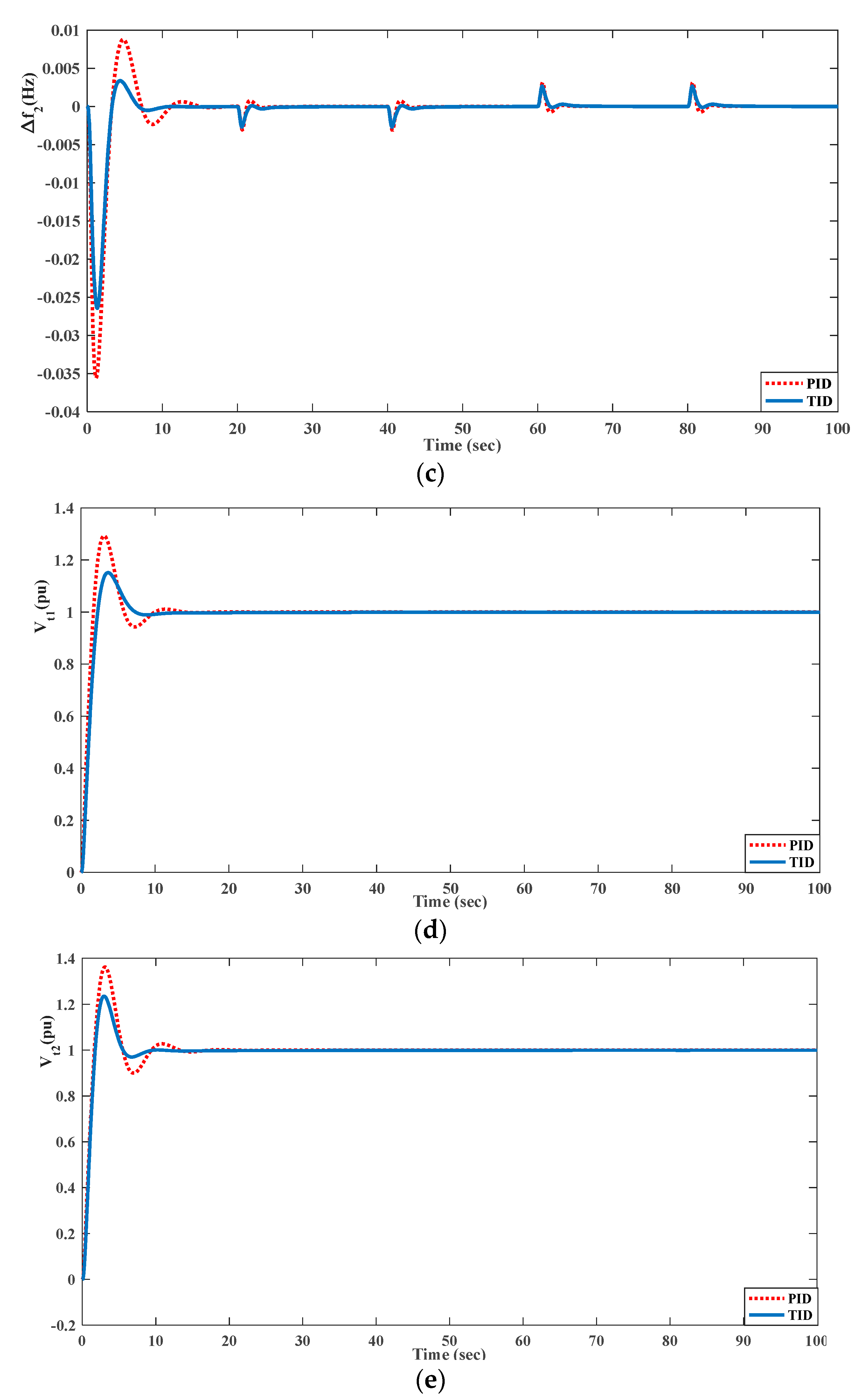
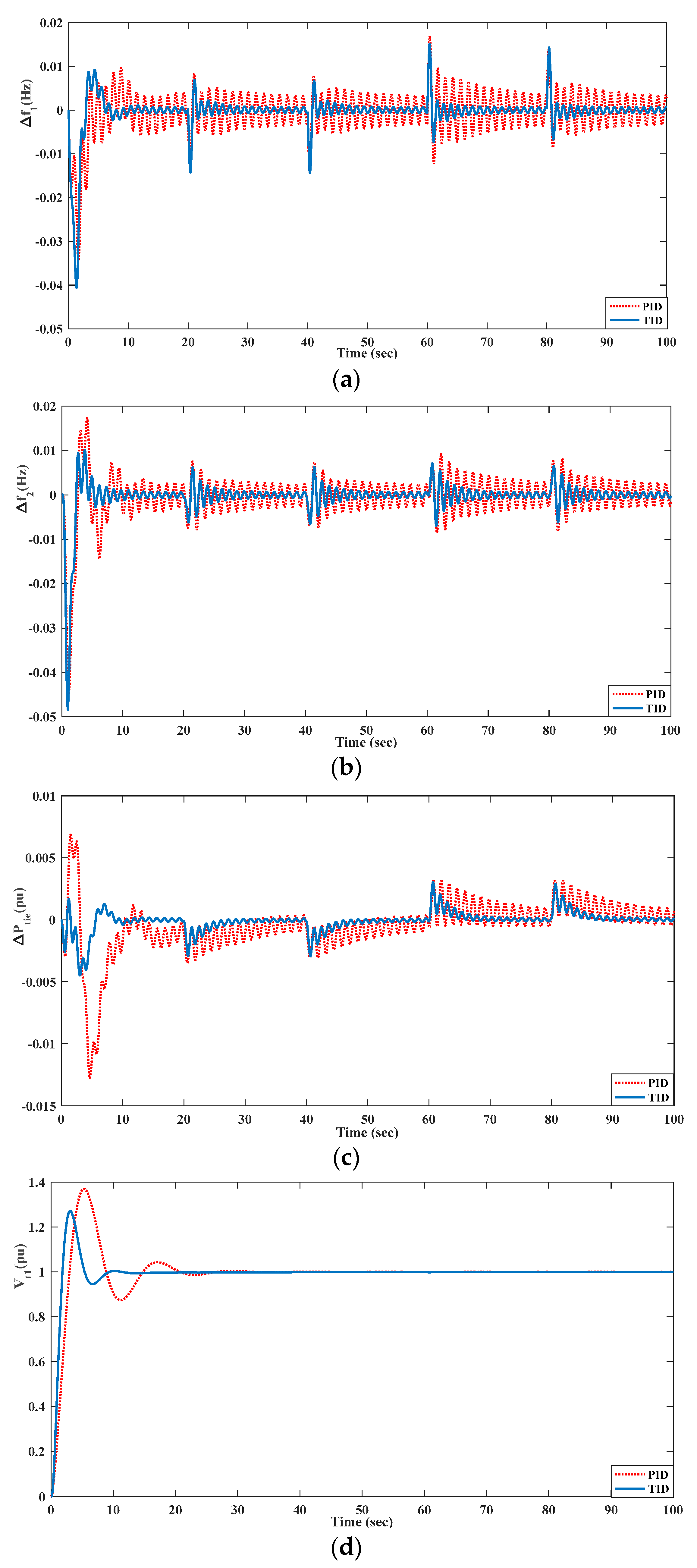
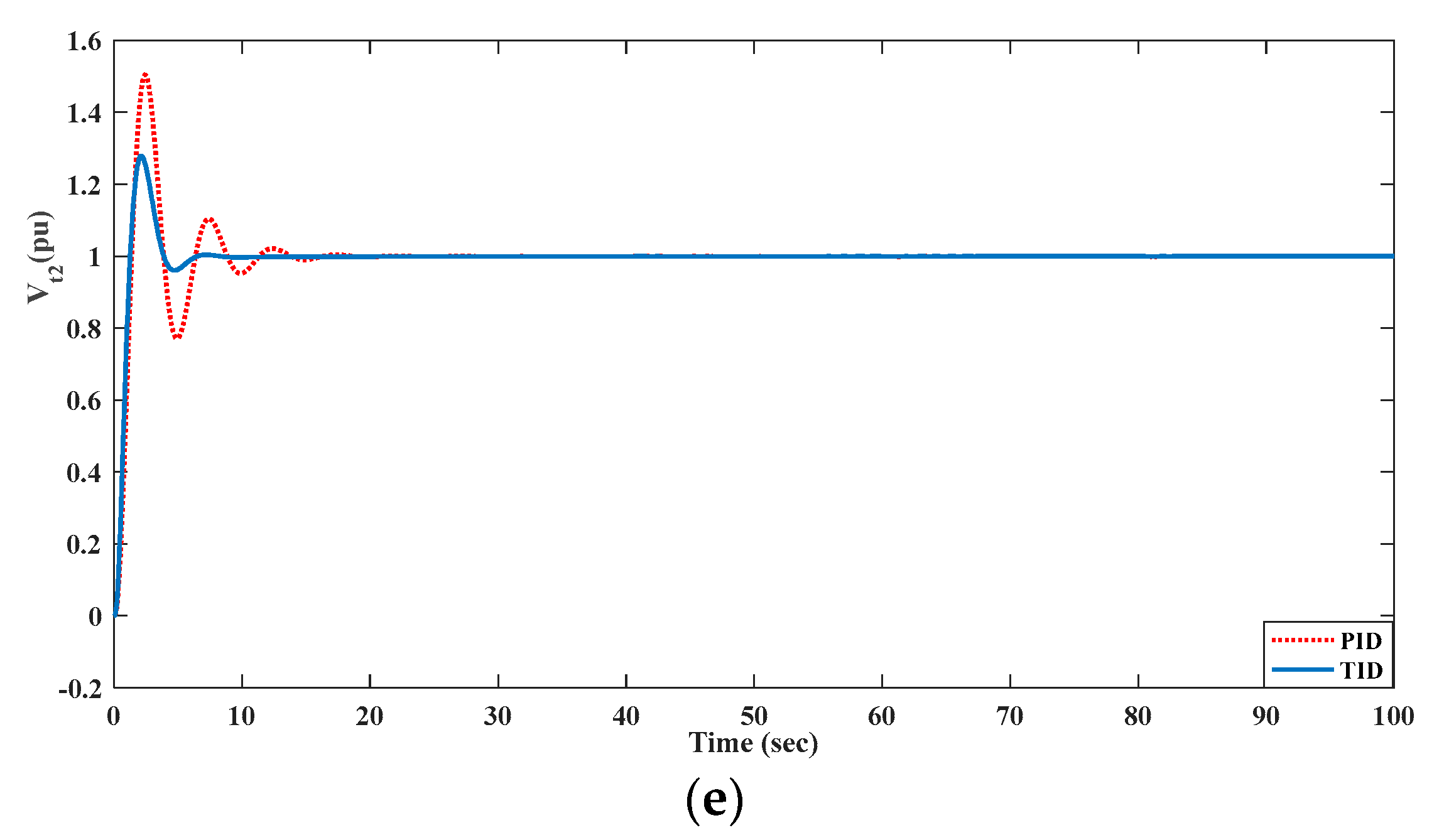
5.3.2. Randomized Load Pattern
5.3.3. Combined Effect of Non-Linearities and Time Delays against RLP
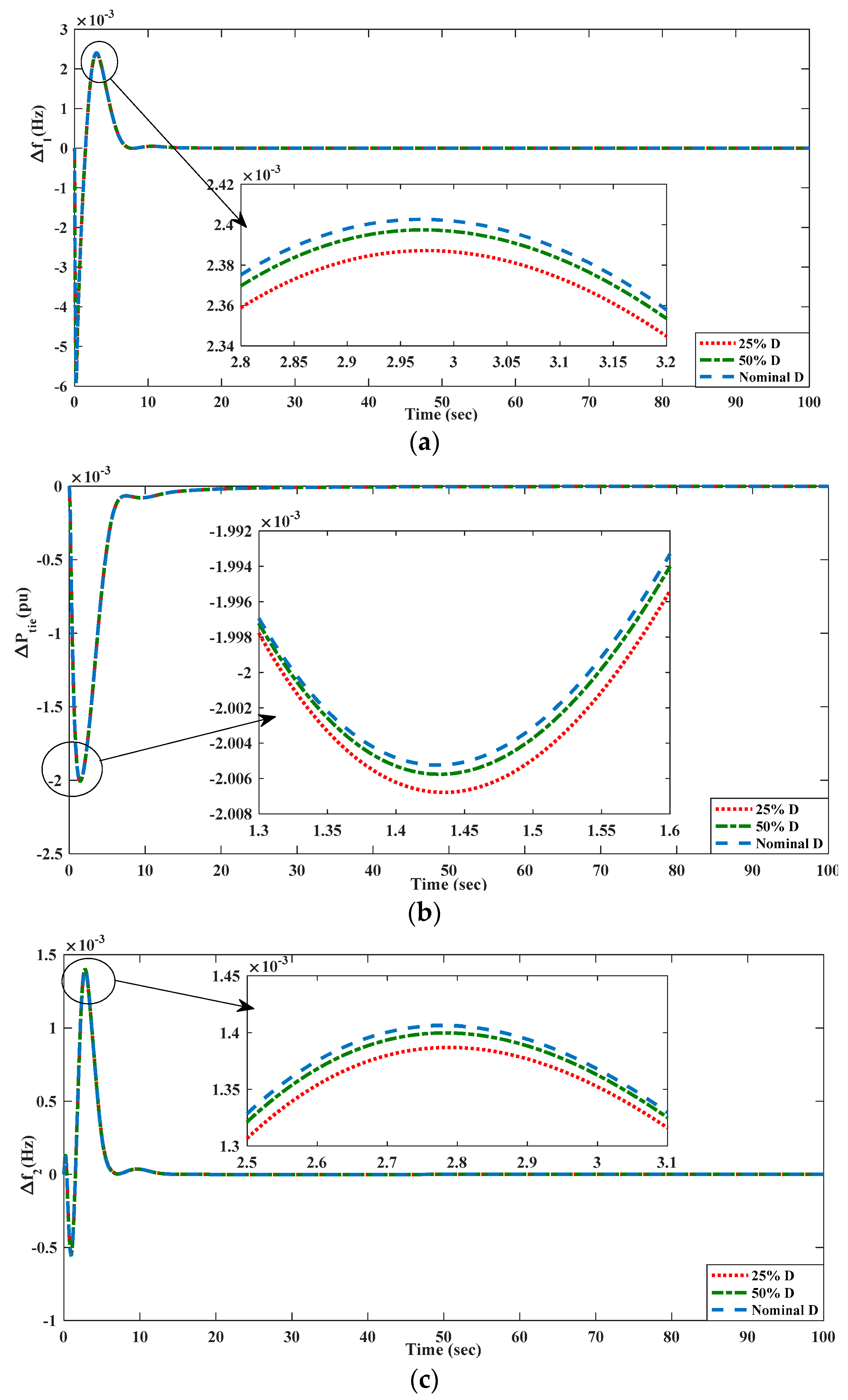
5.4. Insensitivity of the TID Controller
5.4.1. Insensitivity to Variation in D
5.4.2. Insensitivity to Variation in Time Constants of the AVR System
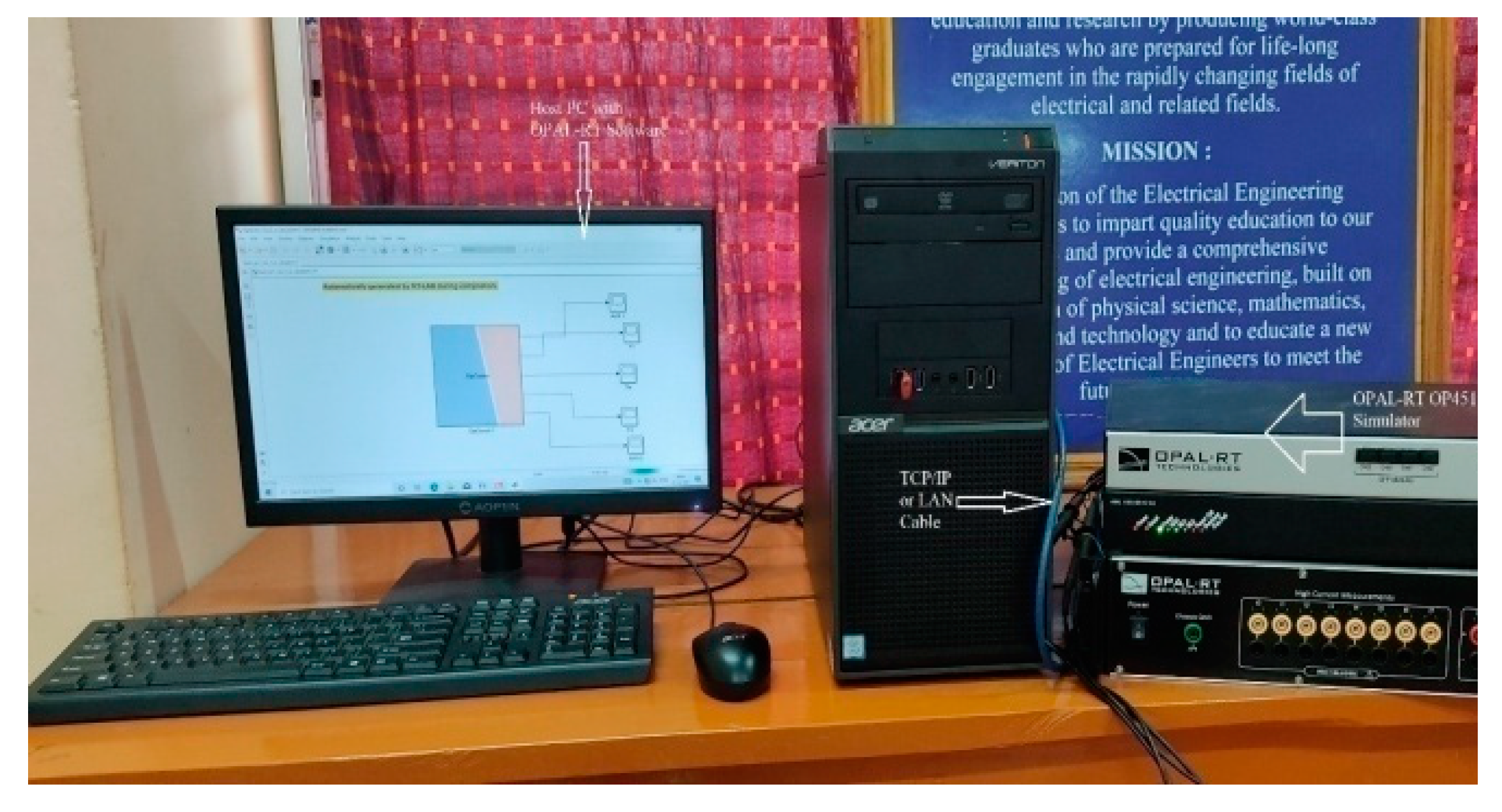
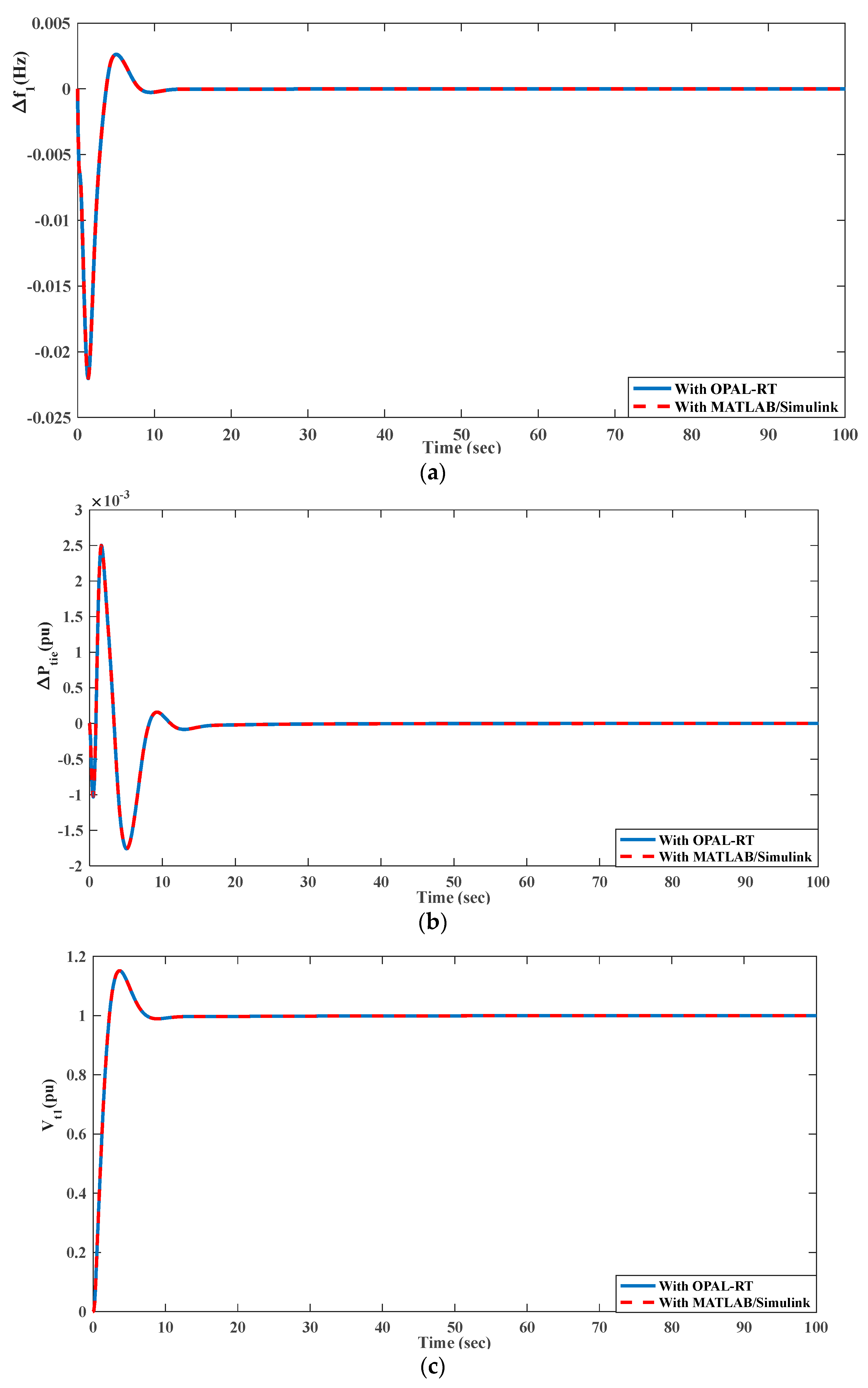
5.5. Validation of Results
6. Conclusions
7. Future Recommendations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kalyan, C.N.S.; Goud, B.S.; Reddy, C.R.; Bajaj, M.; Sharma, N.K.; Alhelou, H.H.; Siano, P.; Kamel, S. Comparative Performance Assessment of Different Energy Storage Devices in Combined LFC and AVR Analysis of Multi-Area Power System. Energies 2022, 15, 629. [Google Scholar] [CrossRef]
- Moschos, I.; Parisses, C. A Novel Optimal PIλDND2N2 Controller Using Coyote Optimization Algorithm for an AVR System. Eng. Sci. Technol. Int. J. 2021, 26, 100991. [Google Scholar] [CrossRef]
- Soliman, M.; Ali, M.N. Parameterization of Robust Multi-Objective PID-Based Automatic Voltage Regulators: Generalized Hurwitz Approach. Int. J. Electr. Power Energy Syst. 2021, 133, 107216. [Google Scholar] [CrossRef]
- Sikander, A.; Thakur, P. A New Control Design Strategy for Automatic Voltage Regulator in Power System. ISA Trans. 2020, 100, 235–243. [Google Scholar] [CrossRef] [PubMed]
- Ayas, M.S.; Sahin, E. FOPID Controller with Fractional Filter for an Automatic Voltage Regulator. Comput. Electr. Eng. 2021, 90, 106895. [Google Scholar] [CrossRef]
- Eke, I.; Saka, M.; Gozde, H.; Arya, Y.; Taplamacioglu, M.C. Heuristic Optimization Based Dynamic Weighted State Feedback Approach for 2DOF PI-Controller in Automatic Voltage Regulator. Eng. Sci. Technol. Int. J. 2021, 24, 899–910. [Google Scholar] [CrossRef]
- Rajbongshi, R.; Saikia, L.C. Combined Voltage and Frequency Control of a Multi-Area Multisource System Incorporating Dish-Stirling Solar Thermal and HVDC Link. IET Renew. Power Gener. 2018, 12, 323–334. [Google Scholar] [CrossRef]
- Rajbongshi, R.; Saikia, L.C. Combined Control of Voltage and Frequency of Multi-Area Multisource System Incorporating Solar Thermal Power Plant Using LSA Optimised Classical Controllers. IET Gener. Transm. Distrib. 2017, 11, 2489–2498. [Google Scholar] [CrossRef]
- Izadkhast, S.; Garcia-Gonzalez, P.; Frías, P. An Aggregate Model of Plug-In Electric Vehicles for Primary Frequency Control. IEEE Trans. Power Syst. 2015, 30, 1475–1482. [Google Scholar] [CrossRef]
- Debbarma, S.; Dutta, A. Utilizing Electric Vehicles for LFC in Restructured Power Systems Using Fractional Order Controller. IEEE Trans. Smart Grid 2017, 8, 2554–2564. [Google Scholar] [CrossRef]
- Khan, M.; Haishun, S. Complete Provision of MPC-Based LFC By Electric Vehicles With Inertial and Droop Support from DFIG-Based Wind Farm. IEEE Trans. Power Deliv. 2022, 37, 716–726. [Google Scholar] [CrossRef]
- Magzoub, M.A.; Alquthami, T. Optimal Design of Automatic Generation Control Based on Simulated Annealing in Interconnected Two-Area Power System Using Hybrid PID—Fuzzy Control. Energies 2022, 15, 1540. [Google Scholar] [CrossRef]
- Ullah, K.; Basit, A.; Ullah, Z.; Albogamy, F.R.; Hafeez, G. Automatic Generation Control in Modern Power Systems with Wind Power and Electric Vehicles. Energies 2022, 15, 1771. [Google Scholar] [CrossRef]
- Mishra, D.K.; Złotecka, D.; Li, L. Significance of SMES Devices for Power System Frequency Regulation Scheme considering Distributed Energy Resources in a Deregulated Environment. Energies 2022, 15, 1766. [Google Scholar] [CrossRef]
- Gupta, D.K.; Jha, A.V.; Appasani, B.; Srinivasulu, A.; Bizon, N.; Thounthong, P. Load Frequency Control Using Hybrid Intelligent Optimization Technique for Multi-Source Power Systems. Energies 2021, 14, 1581. [Google Scholar] [CrossRef]
- Raju, M.; Saikia, L.C.; Sinha, N. Load frequency control of a multi-area system incorporating distributed generation resources, gate controlled series capacitor along with high-voltage direct current link using hybrid ALO-pattern search optimised fractional order controller. IET Renew. Power Gener. 2019, 13, 330–341. [Google Scholar] [CrossRef]
- Raju, M.; Saikia, L.C.; Sinha, N. Maiden Application of Two Degree of Freedom Cascade Controller for Multi-Area Automatic Generation Control. Int. Trans. Electr. Energy Syst. 2018, 28, e2586. [Google Scholar] [CrossRef]
- Raju, M.; Saikia, L.C.; Sinha, N. Load Frequency Control of Multi-Area Hybrid Power System Using Symbiotic Organisms Search Optimized Two Degree of Freedom Controller. Int. J. Renew. Energy Res. 2017, 7, 1664–1674. [Google Scholar]
- Chorasiya, G.; Suhag, S. A Comparative study of MVO and SSA Optimized PID Controller for LFC in EV Integrated Multi Area Network. In Proceedings of the 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kharagpur, India, 1–3 July 2020; pp. 1–7. [Google Scholar]
- Asghar, R.; Ali, A.; Rehman, F.; Ullah, R.; Ullah, K.; Ullah, Z.; Sarwar, M.A.; Khan, B. Load Frequency Control for EVs based Smart Grid System using PID and MPC. In Proceedings of the 2020 3rd International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 29–30 January 2020; pp. 1–6. [Google Scholar]
- Prabu, R.G. Effect of Plug-in Electric Vehicles on Load Frequency Control. In Proceedings of the 2018 8th IEEE India International Conference on Power Electronics (IICPE), Jaipur, India, 13–15 December 2018. [Google Scholar]
- Kumar, M.; Agrawal, S.; Mohamed, T.H. Application of AGPSO Algorithm in Frequency Controller Design for Isolated Microgrid. In Proceedings of the 2021 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 2–5 February 2021; pp. 1–6. [Google Scholar]
- Ramoji, S.K.; Saikia, L.C. Maiden Application of Fuzzy-2DOFTID Controller in Unified Voltage-Frequency Control of Power System. IETE J. Res. 2021, 1–22. [Google Scholar] [CrossRef]
- Ramoji, S.K.; Saikia, L.C. Utilization of Electric Vehicles in Combined Voltage-frequency Control of Multi-area Thermal-Combined Cycle Gas Turbine System Using Two Degree of Freedom Tilt-integral-derivative Controller. Energy Storage 2021, 3, e234. [Google Scholar] [CrossRef]
- Prakash, A.; Parida, S.K. Combined Frequency and Voltage Stabilization of Thermal-Thermal System with UPFC and RFB. In Proceedings of the PIICON 2020 9th IEEE Power India International Conference, Sonepat, India, 28 February–1 March 2020. [Google Scholar] [CrossRef]
- Nahas, N.; Abouheaf, M.; Sharaf, A.; Gueaieb, W. A Self-Adjusting Adaptive AVR-LFC Scheme for Synchronous Generators. IEEE Trans. Power Syst. 2019, 34, 5073–5075. [Google Scholar] [CrossRef]
- Babu, N.R.; Kumar Sahu, D.; Saikia, L.C.; Kumar Ramoji, S. Combined Voltage and Frequency Control of a Multi-Area Multi-Source System Using SFLA Optimized TID Controller. In Proceedings of the 2019 IEEE 16th India Council International Conference, Rajkot, India, 13–15 December 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Rajbongshi, R.; Saikia, L.C.; Tasnin, W.; Saha, A.; Saha, D. Performance Analysis of Combined ALFC and AVR System Incorporating Power System Stabilizer. In Proceedings of the 2nd International Conference on Energy, Power and Environment: Towards Smart Technology, ICEPE 2018, Shillong, India, 1–2 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Ramoji, S.K.; Saikia, L.C. Optimal Coordinated Frequency and Voltage Control of CCGT-Thermal Plants with TIDF Controller. IETE J. Res. 2021, 1–18. [Google Scholar] [CrossRef]
- Bulatov, Y.; Kryukov, A.; Suslov, K. Using Group Predictive Voltage and Frequency Regulators of Distributed Generation Plants in Cyber-Physical Power Supply Systems. Energies 2022, 15, 1253. [Google Scholar] [CrossRef]
- Pan, I.; Das, S. Fractional Order AGC for Distributed Energy Resources Using Robust Optimization. IEEE Trans. Smart Grid 2016, 7, 2175–2186. [Google Scholar] [CrossRef] [Green Version]
- Sharma, D.; Mishra, S. Impacts of System Non-Linearities on Communication Delay Margin for Power Systems Having Open Channel Communication Based Automatic Generation Control. In Proceedings of the 2018 IEEMA Engineer Infinite Conference, eTechNxT, New Delhi, India, 13–14 March 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Sharma, D.; Mishra, S.; Firdaus, A. Multi Objective Gain Tuning Approach for Time Delayed Automatic Generation Control. In Proceedings of the IEEE Region 10 Annual International Conference, Penang, Malaysia, 5–8 November 2017; pp. 2896–2900. [Google Scholar] [CrossRef]
- Kalyan, C.H.N.S.; Suresh, C.V.; Rajesh, M. Performance Evaluation of Several Fuzzy Controllers in AGC of Dual Area System with Time Delays. In Proceedings of the 2021 2nd International Conference for Emerging Technology, INCET, Belagavi, India, 21–23 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Otchere, I.K.; Kyeremeh, K.A.; Frimpong, E.A. Adaptive PI-GA Based Technique for Automatic Generation Control with Renewable Energy Integration. In Proceedings of the 2020 IEEE PES/IAS PowerAfrica, Nairobi, Kenya, 25–28 August 2020; pp. 2020–2023. [Google Scholar] [CrossRef]
- Cam, E.; Gorel, G.; Mamur, H. Use of the Genetic Algorithm-Based Fuzzy Logic Controller for Load-Frequency Control in a Two Area Interconnected Power System. Appl. Sci. 2017, 7, 308. [Google Scholar] [CrossRef] [Green Version]
- Gharib, K.; Ebrahim, O.; Temraz, H.; Awadallah, M. Application of the Genetic Algorithm to Design an Optimal PID Controller for the AVR System. Int. Conf. Electr. Eng. 2008, 6, 1–11. [Google Scholar] [CrossRef]
- Jagatheesan, K.; Anand, B.; Dey, N.; Gaber, T.; Hassanien, A.E.; Kim, T.H. A Design of PI Controller Using Stochastic Particle Swarm Optimization in Load Frequency Control of Thermal Power Systems. In Proceedings of the 2015 4th International Conference on Information Science and Industrial Applications (ISI), Busan, Korea, 20–22 September 2015; pp. 25–31. [Google Scholar] [CrossRef]
- Shouran, M.; Alsseid, A. Particle Swarm Optimization Algorithm-Tuned Fuzzy Cascade Fractional Order PI-Fractional Order PD for Frequency Regulation of Dual-Area Power System. Processes 2022, 10, 477. [Google Scholar] [CrossRef]
- Ahcene, F.; Bentarzi, H. Automatic Voltage Regulator Design Using Particle Swarm Optimization Technique. In Proceedings of the 2020 International Conference on Electrical Engineering (ICEE), Istanbul, Turkey, 25–27 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Kumar, V.; Sharma, V. Automatic Voltage Regulator with Particle Swarm Optimized Model Predictive Control Strategy. In Proceedings of the 2020 1st IEEE International Conference on Measurement, Instrumentation, Control and Automation (ICMICA), Kurukshetra, India, 24–26 June 2020; pp. 2–6. [Google Scholar] [CrossRef]
- Genovesi, S.; Monorchio, A.; Manara, G. Particle Swarm Optimization for the Design of Frequency Selective Surfaces. IEEE Antennas Wirel. Propag. Lett. 2006, 5, 277–279. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A New Optimizer Using Particle Swarm Theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Honghai, K.; Fuqing, S.; Yurui, C.; Kai, W.; Zhiyi, H. Reactive Power Optimization for Distribution Network System with Wind Power Based on Improved Multi-Objective Particle Swarm Optimization Algorithm. Electr. Power Syst. Res. 2022, 213, 108731. [Google Scholar] [CrossRef]
- Beltran, A.S.; Das, S. Particle Swarm Optimization with Reducing Boundaries (PSO-RB) for Maximum Power Point Tracking of Partially Shaded PV Arrays. In Proceedings of the Conference Record of the IEEE Photovoltaic Specialists Conference, Calgary, AB, Canada, 15 June–21 August 2020; pp. 2040–2043. [Google Scholar] [CrossRef]
- Yang, Y.; Jiang, X.; Tong, Z. Optimization Design of Quad-Rotor Flight Controller Based on Improved Particle Swarm Optimization Algorithm. In Advances in Intelligent Systems and Interactive Applications, Proceedings of the Proceedings of the 4th International Conference on Intelligent, Interactive Systems and Applications (IISA2019), Bangkok, Thailand, 28–30 June 2019; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2020; pp. 180–188. [Google Scholar] [CrossRef]
- Akbari, M.S.; Asemani, M.H.; Vafamand, N.; Mobayen, S.; Fekih, A. Observer-Based Predictive Control of Nonlinear Clutchless Automated Manual Transmission for Pure Electric Vehicles: An LPV Approach. IEEE Access 2021, 9, 20469–20480. [Google Scholar] [CrossRef]
- Allahmoradi, E.; Mirzamohammadi, S.; Bonyadi Naeini, A.; Maleki, A.; Mobayen, S.; Skruch, P. Policy Instruments for the Improvement of Customers’ Willingness to Purchase Electric Vehicles: A Case Study in Iran. Energies 2022, 15, 4269. [Google Scholar] [CrossRef]
- Nasiri, M.; Mobayen, S.; Faridpak, B.; Fekih, A.; Chang, A. Small-Signal Modeling of PMSG-Based Wind Turbine for Low Voltage Ride-Through and Artificial Intelligent Studies. Energies 2020, 13, 6685. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| f (frequency) | 60 Hz |
| Bi (damping constant) | 0.425 pu/Hz |
| R (regulation) | 2.4 Hz/pu |
| Thermal Power plant | |
| Kg | 1 |
| Tg | 0.3 s |
| Kt | 1 |
| Tt | 0.08 s |
| Electric Vehicle | |
| RAG | 2.4 Hz/pu |
| KEV | 1 |
| TEV | 1 s |
| Distributed Generation | |
| KPV | 1 |
| TPV | 1.8 s |
| KAE | 1/500 |
| TAE | 0.5 s |
| KFC | 1/100 |
| TFC | 4 s |
| KWTS | 1 |
| TWTS | 1.5 s |
| KDEG | 3/1000 |
| TDEG | 2 s |
| Power System | |
| KPi | 120 |
| TPi | 20 s |
| Tie Line | |
| T12 | 0.0867 |
| a12 | −1 |
| AVR | |
| Ke | 1 |
| Te | 0.4 s |
| Kf | 0.8 |
| Tf | 1.4 s |
| Ka | 10 |
| Ta | 0.1 s |
| Ks | 1 |
| Ts | 0.05 s |
| K1 | 1 |
| K2 | 0.1 |
| K3 | 0.5 |
| K4 | 1.4 |
| Ps | 0.145 |
| Parameter | KP | KI | KD |
|---|---|---|---|
| Area 1 | 0.7611 | 0.544 | 0.2415 |
| Area 2 | 0.711 | 0.3576 | 0.3367 |
| Parameter | KT | n | KI | KD |
|---|---|---|---|---|
| Area 1 | 0.9563 | 3.14 | 0.7429 | 0.9999 |
| Area 2 | 0.9653 | 4.0823 | 0.8799 | 0.984 |
| Parameter | ∆f1 (Hz) | ∆f2 (Hz) | ∆Ptie (pu) | |
|---|---|---|---|---|
| PID | Peak Overshoot (in 10^(−3)) | 3.48 | 3.24 | NIL |
| Peak Undershoot (in 10^(−3)) | 11.08 | 2.491 | 2.8 | |
| Settling Time(s) | 19.74 | 18.2 | 20.3 | |
| TID | Peak Overshoot (in 10^(−3)) | 1.294 | 1.387 | NIL |
| Peak Undershoot (in 10^(−3)) | 5.902 | 0.54 | 2.006 | |
| Settling Time(s) | 10.4 | 6.8 | 12.5 |
| Parameter | KP | KI | KD |
|---|---|---|---|
| Area 1 | 0.0187 | 0.2536 | 0.6999 |
| Area 2 | 0.1962 | 0.1999 | 0.5905 |
| Parameters | KT | n | KI | KD |
|---|---|---|---|---|
| Area 1 | 0.5977 | 4.3453 | 0.6986 | 0.9999 |
| Area 2 | 0.9984 | 2.1517 | 0.8569 | 0.9618 |
| Parameter | ∆f1 (Hz) | ∆f2 (Hz) | ∆Ptie (pu) | |
|---|---|---|---|---|
| PID | Peak Overshoot (in 10^(−3)) | 4.2 | 2.65 | 1.4 |
| Peak Undershoot (in 10^(−3)) | 15.24 | 8.56 | 5.64 | |
| Settling Time(s) | - | - | - | |
| TID | Peak Overshoot (in 10^(−3)) | 1.4 | 1.116 | 1.8 |
| Peak Undershoot (in 10^(−3)) | 8.45 | 3.6 | 2.98 | |
| Settling Time(s) | 15.1 | 17.3 | 15.3 |
| Parameter | KP | KI | KD |
|---|---|---|---|
| Area 1 | 0.5854 | 0.4321 | 0.6764 |
| Area 2 | 0.6530 | 0.7517 | 0.8960 |
| Parameter | KT | n | KI | KD |
|---|---|---|---|---|
| Area 1 | 0.5773 | 1.9058 | 0.4240 | 0.4195 |
| Area 2 | 0.9999 | 1.3026 | 0.5228 | 0.2710 |
| Parameter | KP | KI | KD |
|---|---|---|---|
| Area 1 | 0.0477 | 0.6158 | 0.1237 |
| Area 2 | 0.1741 | 0.5329 | 0.6851 |
| Parameter | KT | n | KI | KD |
|---|---|---|---|---|
| Area 1 | 0.6562 | 1.1248 | 0.0171 | 0.156 |
| Area 2 | 0.7948 | 2.764 | 0.7713 | 0.2199 |
| Parameter | KP | KI | KD |
|---|---|---|---|
| AVR | 0.7974 | 0.9999 | 0.8416 |
| Parameter | KT | n | KI | KD |
|---|---|---|---|---|
| AVR | 0.9103 | 3.11 | 0.2531 | 0.4903 |
| Parameter | Vt (pu) | |
|---|---|---|
| PID | Peak Overshoot | 1.346 |
| Peak Undershoot | NIL | |
| Settling Time(s) | 11.3 | |
| TID | Peak Overshoot | 1.23 |
| Peak Undershoot | NIL | |
| Settling Time(s) | 5.1 |
| Parameter | KP | KI | KD |
|---|---|---|---|
| Area 1 | 0.2589 | 0.65649 | 0.6239 |
| Area 2 | 0.0218 | 0.2297 | 0.485 |
| AVR 1 | 0.7682 | 0.8001 | 0.7957 |
| AVR 2 | 0.7723 | 0.998 | 0.9827 |
| Parameter | KT | n | KI | KD |
|---|---|---|---|---|
| Area 1 | 0.9552 | 3.0699 | 0.8319 | 0.9255 |
| Area 2 | 0.9399 | 2.909 | 0.8348 | 0.9453 |
| AVR 1 | 0.8776 | 3.777 | 0.268 | 0.9696 |
| AVR 2 | 0.957 | 2.999 | 0.3594 | 0.8492 |
| Parameter | ∆f1 (Hz) | ∆f2 (Hz) | ∆Ptie (pu) | |
|---|---|---|---|---|
| PID | Peak Overshoot (in 10^(−3)) | 7 | 8.77 | 1.1 |
| Peak Undershoot (in 10^(−3)) | 33.3 | 35.5 | 1.654 | |
| Settling Time(s) | 16.8 | 16.3 | 22.7 | |
| TID | Peak Overshoot (in 10^(−3)) | 2.6 | 3.37 | 0.478 |
| Peak Undershoot (in 10^(−3)) | 23.5 | 26.45 | 1.43 | |
| Settling Time(s) | 10.1 | 7.2 | 19.6 |
| Parameter | Vt1 (pu) | Vt2 (pu) | |
|---|---|---|---|
| PID | Peak Overshoot | 1.293 | 1.36 |
| Peak Undershoot | NIL | NIL | |
| Settling Time(s) | 12.43 | 15.1 | |
| TID | Peak Overshoot | 1.151 | 1.235 |
| Peak Undershoot | NIL | NIL | |
| Settling Time(s) | 8.51 | 7.88 |
| Parameter | KP | KI | KD |
|---|---|---|---|
| Area 1 | 0.9260 | 0.8404 | 0.4653 |
| Area 2 | 0.2083 | 0.5591 | 0.4756 |
| AVR 1 | 0.3962 | 0.3576 | 0.7463 |
| AVR 2 | 0.3156 | 0.6342 | 0.0663 |
| Parameter | KT | n | KI | KD |
|---|---|---|---|---|
| Area 1 | 0.0743 | 1.087 | 0.82285 | 0.9255 |
| Area 2 | 0.9567 | 3.6834 | 0.4888 | 0.9961 |
| AVR 1 | 0.7247 | 2.5301 | 0.3014 | 0.6471 |
| AVR 2 | 0.9999 | 3.6129 | 0.5001 | 0.4756 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shukla, H.; Nikolovski, S.; Raju, M.; Rana, A.S.; Kumar, P. A Particle Swarm Optimization Technique Tuned TID Controller for Frequency and Voltage Regulation with Penetration of Electric Vehicles and Distributed Generations. Energies 2022, 15, 8225. https://doi.org/10.3390/en15218225
Shukla H, Nikolovski S, Raju M, Rana AS, Kumar P. A Particle Swarm Optimization Technique Tuned TID Controller for Frequency and Voltage Regulation with Penetration of Electric Vehicles and Distributed Generations. Energies. 2022; 15(21):8225. https://doi.org/10.3390/en15218225
Chicago/Turabian StyleShukla, Hiramani, Srete Nikolovski, More Raju, Ankur Singh Rana, and Pawan Kumar. 2022. "A Particle Swarm Optimization Technique Tuned TID Controller for Frequency and Voltage Regulation with Penetration of Electric Vehicles and Distributed Generations" Energies 15, no. 21: 8225. https://doi.org/10.3390/en15218225