
Implementation and Validation for Multitasks of a Cost-Effective Scheme Based on ESS and Braking Resistors in PMSG Wind Turbine Systems
 , , and
, , and
Abstract
:1. Introduction
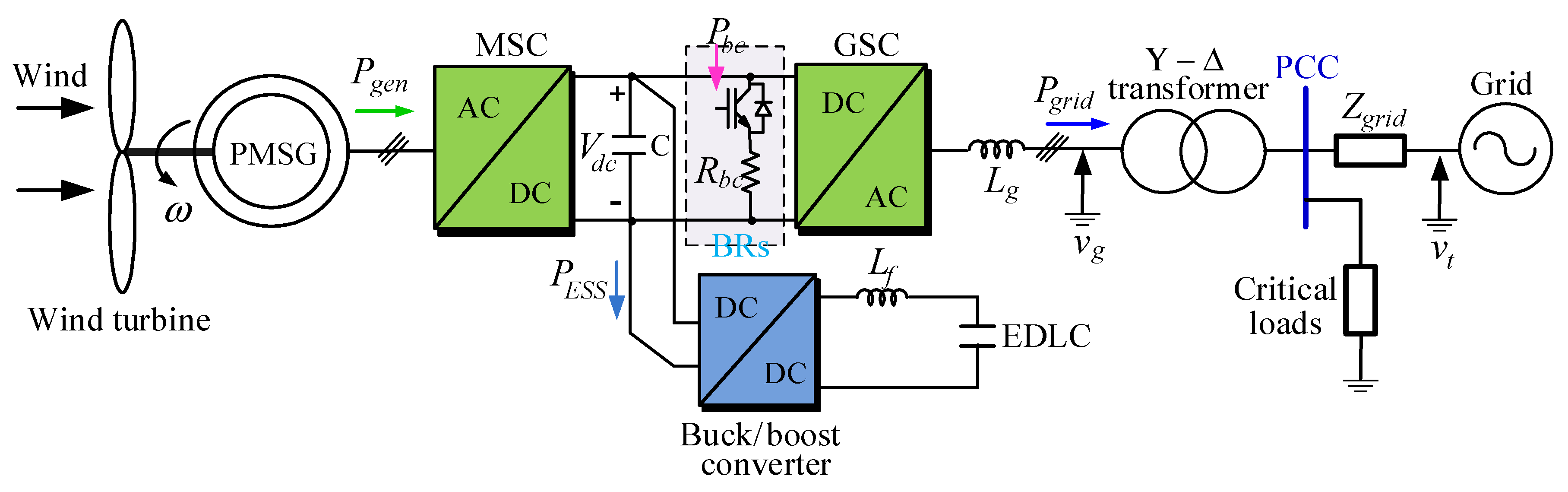
2. Control Scheme of PMSG Wind Turbine Systems
2.1. Turbine Inertial Effect for Absorbing Power under Grid Faults
2.2. Control of Grid-Side Converter
2.3. Control of Machine-Side Converter (MSC)
3. Power Smoothing Operation and FRT Control
3.1. Calculation of Power References for the ESS
3.2. Control of the ESS
3.3. Control of the BRs
4. Ratings of the ESSs and the BRs
5. Simulation Results
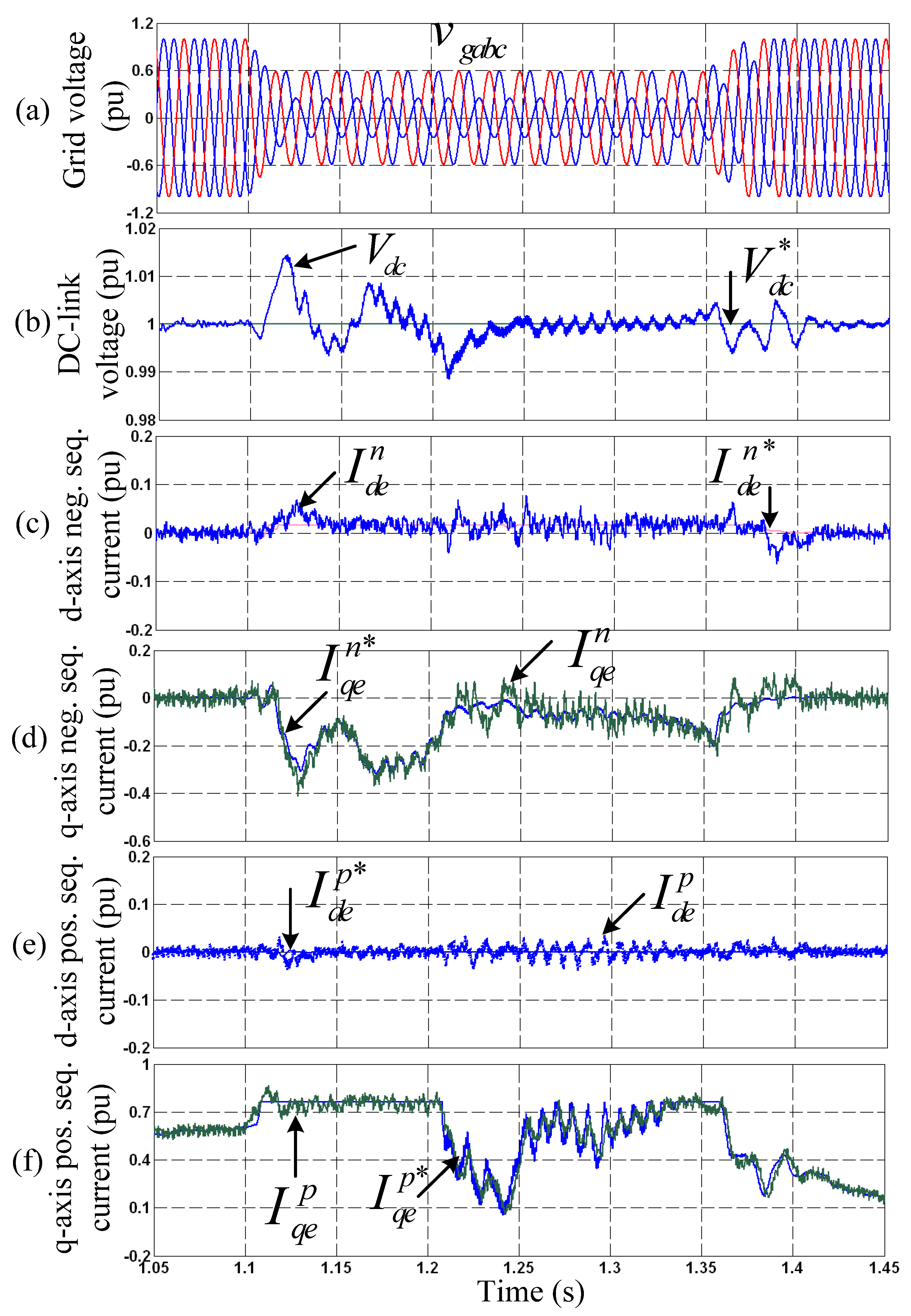
5.1. Test for a Fault Ride-Through Capability
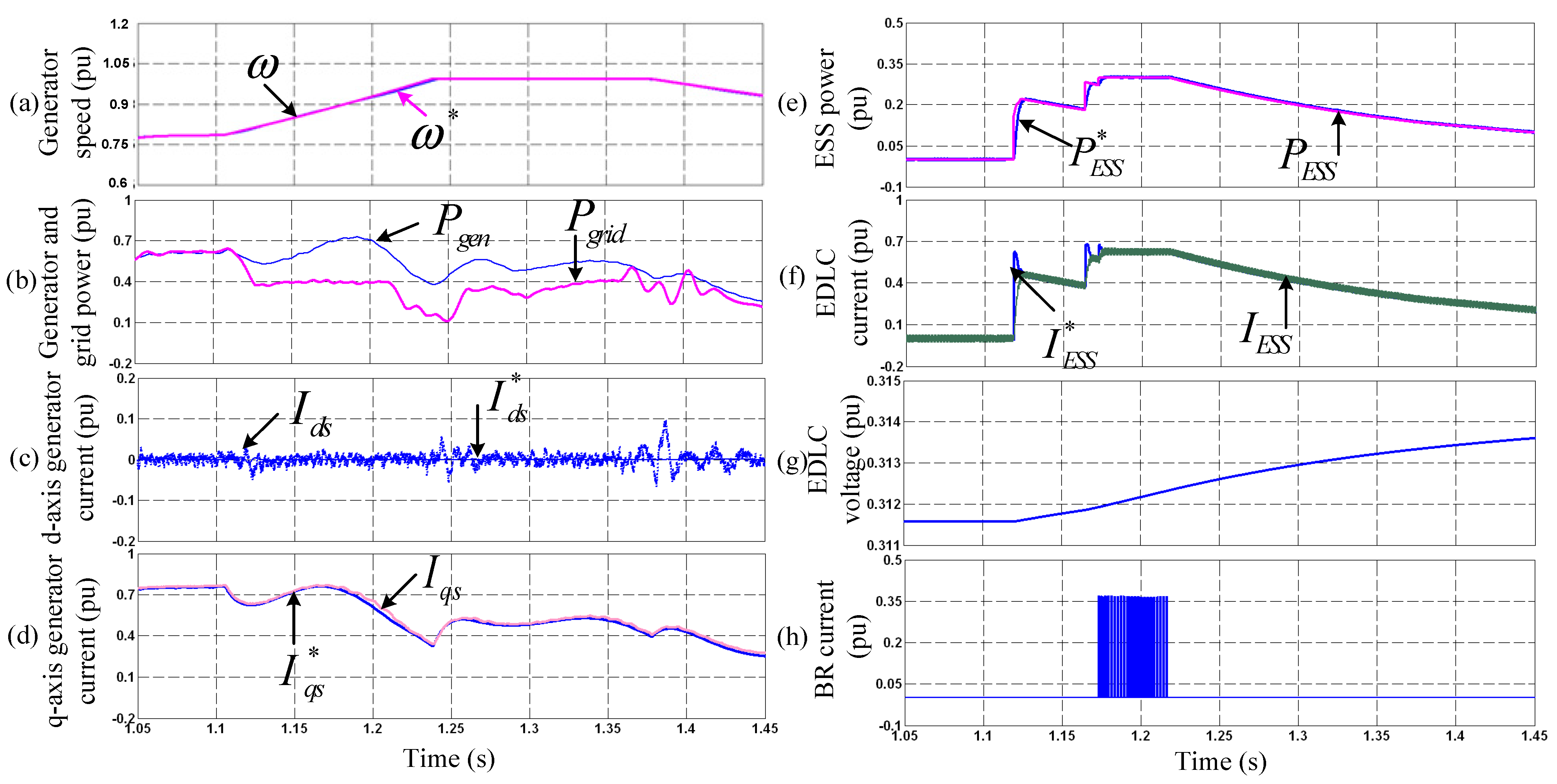
5.2. Power Fluctuation Mitigation Tests
6. Experimental Implementation and Results
6.1. Experimental Implementation of the Studied System
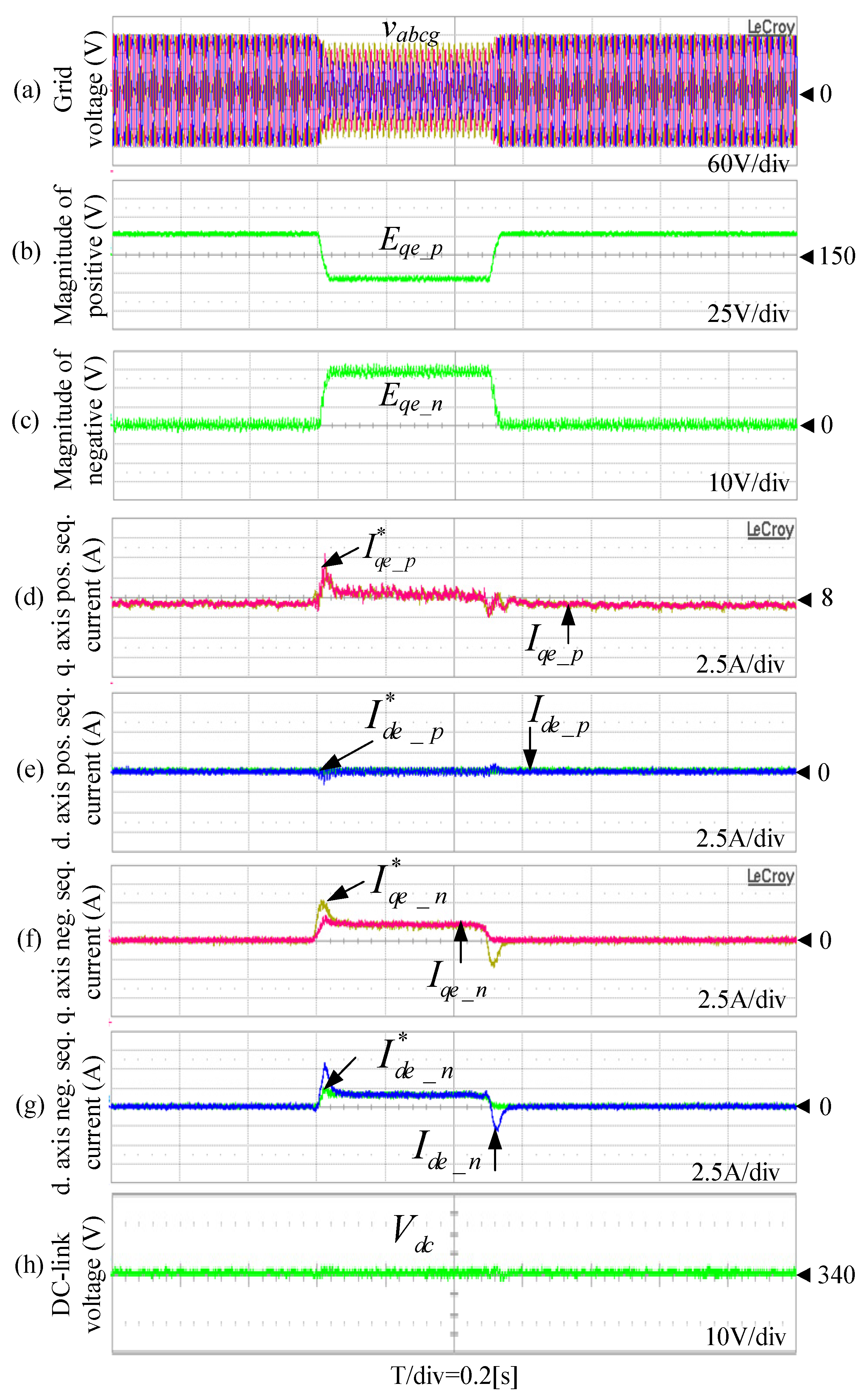
6.2. FRT Tests for an Unbalanced Voltage Sag
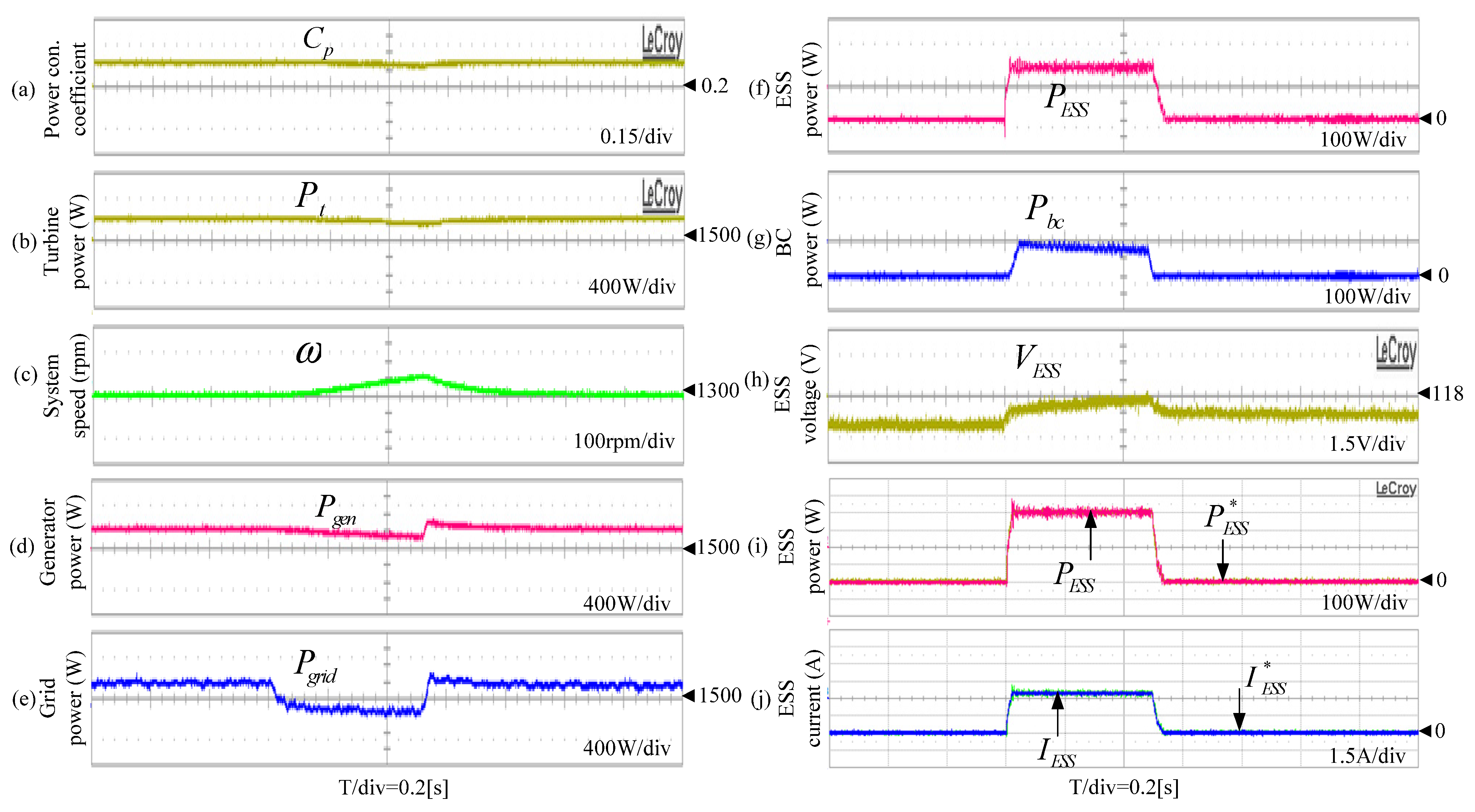
6.3. Power Fluctuation Mitigation Tests
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Huynh, P.; Tungare, S.; Banerjee, A. Maximum power point tracking for wind turbine using integrated generator-rectifier systems. IEEE Trans. Power Electron. 2021, 36, 504–512. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Van, T.L.; Nawaz, A.; Natsheh, A. Feedback Linearization-Based Control Strategy for Interlinking Inverters of Hybrid AC/DC Microgrids with Seamless Operation Mode Transition. Energies 2021, 14, 5613. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Quach, N.T. A hybrid HVDC converter based on M2C and diode rectifiers without DC capacitors for offshore wind farm integration. Int. J. Electr. Power Energy Syst. 2021, 133, 107260. [Google Scholar] [CrossRef]
- Ramasamy, T.; Abdul Basheer, A.; Tak, M.-H.; Joo, Y.-H.; Lee, S.-R. An Effective DC-Link Voltage Control Strategy for Grid-Connected PMVG-Based Wind Energy Conversion System. Energies 2022, 15, 2931. [Google Scholar] [CrossRef]
- Prince, M.K.K.; Arif, M.T.; Gargoom, A.; Oo, A.M.T.; Haque, E. Modeling, parameter measurement, and control of PMSG-based grid-connected wind energy conversion system. J. Mod. Power Syst. Clean Energy 2021, 9, 1054–1065. [Google Scholar] [CrossRef]
- do Nascimento, T.F.; Nunes, E.A.D.F.; Villarreal, E.R.L.; Pinheiro, R.F.; Salazar, A.O. Performance analysis of an electromagnetic frequency regulator under parametric variations for wind system applications. Energies 2022, 15, 2873. [Google Scholar] [CrossRef]
- Yuan, H.; Xin, H.; Huang, L.; Wang, Z.; Wu, D. Unified power quality conditioner with advanced dual control for performance improvement of DFIG-based wind farm. IEEE Trans. Energy Convers. 2019, 34, 838–848. [Google Scholar] [CrossRef]
- Luo, C.; Banakar, H.; Shen, B.; Ooi, B.T. Strategy to smooth wind power fluctuation of wind turbine generator. IEEE Trans. Energy Convers. 2007, 22, 341–349. [Google Scholar] [CrossRef]
- Wang, D. Utilisation of kinetic energy from wind turbine for grid connections: A review paper. IET Renew. Power Gener. 2018, 12, 615–624. [Google Scholar] [CrossRef]
- Carrasco, J.M.; Franquelo, L.G.; Bialasiewicz, J.T.; Galvan, E.; Guisado, R.C.P.; Prats, M.A.M.; Leon, J.I.; Alfonso, M. Power-electronic system for the grid integration of renewable energy sources: A survey. IEEE Trans. Ind. Electron. 2006, 53, 1002–1016. [Google Scholar] [CrossRef]
- Cardenas, R.; Asher, G.; Pena, R.; Clare, J. Power smoothing control using sensorless flywheel drive in wind–diesel generation system. In Proceedings of the IEEE 28th Annual IEEE IECON, Seville, Spain, 5–8 November 2002; pp. 3303–3308. [Google Scholar]
- Magnus, D.; Scharlau, C.C.; Pfitscher, L.L.; Costa, G.C.; Silva, G.M. A novel approach for robust control design of hidden synthetic inertia for variable speed wind turbines. Electr. Power Syst. Res. 2021, 196, 107267. [Google Scholar] [CrossRef]
- Barra, P.; de Carvalho, W.C.; Menezes, T.S.; Fernandes, R.A.S.; Coury, D.V. A review on wind power smoothing using high-power energy storage systems. Renew. Sustain. Energy Rev. 2021, 137, 110455. [Google Scholar] [CrossRef]
- Eydi, M.; Alishahi, M.; Zarif, M. A novel output power determination and power distribution of hybrid energy storage system for wind turbine power smoothing. IET Electric Power Appl. 2022, 1–17. [Google Scholar] [CrossRef]
- Gencer, A. Analysis and Control of Fault Ride Through Capability Improvement PMSG Based on WECS Using Active Crowbar System During Different Fault Conditions. Elektron. Elektrotechnika 2018, 24, 64–69. [Google Scholar] [CrossRef] [Green Version]
- Nasiri, M.; Arzani, A. Roust control scheme for the braking chopper of PMSG-based wind turbines—A comparative assessment. Int. J. Electr. Power Energy Syst. 2022, 134, 107322. [Google Scholar] [CrossRef]
- Jeong, D.H.; Kim, C.H.; Gui, Y.H.; Chung, C.C. Sliding mode control for LVRT of a PMSG wind turbine using stored energy in rotor inertia. In Proceedings of the IEEE Power and Energy Society General Meeting, Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Alhejji, A.; Bouzid, Y. Robust Adaptive PI Controller of Low Voltage Ride-Through For PMSG-Based Wind Turbine. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 1233–1237. [Google Scholar]
- Kim, C.; Kim, W. Coordinated Fuzzy-Based Low-Voltage Ride-Through Control for PMSG Wind Turbines and Energy Storage Systems. IEEE Access 2020, 8, 105874–105885. [Google Scholar] [CrossRef]
- Shen, Y.-W.; Ke, D.-P.; Qiao, W.; Sun, Y.-Z.; Kirschen, D.S.; Wei, C. Transient reconfiguration and coordinated control for power converters to enhance the LVRT of a DFIG wind turbine with an energy storage device. IEEE Trans. Energy Convers. 2015, 30, 1679–1690. [Google Scholar] [CrossRef]
- Kim, C.; Kim, W. Low-Voltage Ride-Through Coordinated Control for PMSG Wind Turbines Using De-Loaded Operation. IEEE Access 2021, 9, 66599–66606. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Lee, D.-C.; Song, S.-H.; Kim, E.-H. Improvement of power quality for PMSG wind turbine systems. In Proceedings of the IEEE-ECCE, Atlanta, GA, USA, 12–16 September 2010; pp. 2763–2770. [Google Scholar]
- Nguyen, T.H.; Lee, D.-C. Advanced fault ride-through technique for PMSG wind turbine systems using line-side converter as STATCOM. IEEE Trans. Ind. Electron. 2013, 60, 2842–2850. [Google Scholar] [CrossRef]
- Lubosny, Z. Wind Turbine Operation in Electric Power System; Springer-Verlag: Berlin/Heidelberg, Germany, 2003; Chapter 5. [Google Scholar]
- Shaker, M.S.; Kraidi, A.A. Robust fault-tolerant control of wind turbine systems against actuator and sensor faults. Arab. J. Sci. Eng. 2017, 42, 3055. [Google Scholar] [CrossRef]
- Akhmatov, V. Induction Generators for Wind Power; Multi-Science Publishing Company: Essex, UK, 2005; Chapter 3. [Google Scholar]
- Jang, J.-I.; Lee, D.-C. High performance control of three-phase PWM converters under non-ideal source voltage. In Proceedings of the IEEE ICIT, Mumbai, India, 15–17 December 2006; pp. 2791–2796. [Google Scholar]
- Song, H.-S.; Nam, K. Dual current control scheme for PWM converter under unbalanced input voltage conditions. IEEE Trans. Ind. Appl. 1999, 46, 953–959. [Google Scholar]
- Rodriguez, P.; Pou, J.; Bergas, J.; Candela, J.I.; Burgos, R.P.; Boroyevich, D. Decoupled double synchronous reference frame PLL for power converters control. IEEE Trans. Power Electron. 2007, 22, 584–592. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Aguilar, R.S.M.; Otadui, I.E.; Teodorescu, R.; Blaabjerg, F. A stationary reference frame grid synchronization system for three-phase grid-connected power converters under adverse grid conditions. IEEE Trans. Power Electron. 2012, 27, 99–112. [Google Scholar] [CrossRef]
- Ibrahim, A.O.; Nguyen, T.H.; Lee, D.-C.; Kim, S.-C. A fault ride-through technique of DFIG wind turbine systems using dynamic voltage restorers. IEEE Trans. Energy Convers. 2011, 26, 871–882. [Google Scholar] [CrossRef]
- Fernández, G.; Martínez, A.; Galán, N.; Ballestín-Fuertes, J.; Muñoz-Cruzado-Alba, J.; López, P.; Stukelj, S.; Daridou, E.; Rezzonico, A.; Ioannidis, D. Optimal D-STATCOM Placement Tool for Low Voltage Grids. Energies 2021, 14, 4212. [Google Scholar] [CrossRef]
- Sul, S.-K. Control of Electrical Machine Drive Systems; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Data, R.; Ranganathan, V.T. A method of tracking the peak power points for a variable speed wind energy conversion system. IEEE Trans. Energy Convers. 2003, 18, 163–168. [Google Scholar] [CrossRef]
- Sharma, S.; Chandra, A.; Saad, M.; Lefebvre, S.; Asber, D.; Lenoir, L. Voltage flicker mitigation employing smart loads with high penetration of renewable energy in distribution systems. IEEE Trans. Sust. Energy 2017, 8, 414–424. [Google Scholar] [CrossRef]
- Camara, M.B.; Gualous, H.; Gustin, F.; Berthon, A. Design and new control of DC/DC converters to share energy between supercapacitors and batteries in hybrid vehicles. IEEE Trans. Veh. Tech. 2008, 57, 2721–2735. [Google Scholar] [CrossRef]
- Wang, J.; Xiong, X.; Li, H.; Lu, X. Time-periodic model of wind speed and its application in risk evaluation of wind-power-integrated power systems. IET Renew. Power Gener. 2019, 13, 46–54. [Google Scholar] [CrossRef]
- Available online: https://www.amazon.ae/Maxwell-DuraBlue-Capacitor-3000farad-ultracapacitor/dp/B081LBMNH2/ref=sr_1_4?crid=S8K48G97H0M1&keywords=super+capacitor&qid=1665136325&qu=eyJxc2MiOiI0LjQyIiwicXNhIjoiMy43NSIsInFzcCI6IjAuMDAifQ%3D%3D&sprefix=supercapacito%2Caps%2C234&sr=8-4 (accessed on 8 October 2022).
- Available online: https://ae.wiautomation.com/siemens/drives-motors-circuits-protection/sinamics/6SL30001BE313AA0?utm_source=shopping_free&utm_medium=organic&utm_content=AE50617&gclid=Cj0KCQjwnP-ZBhDiARIsAH3FSReMDOWHKVbC6VEdM0KUlGzyPw3MqflDOLICsMR2KF62a50nwJ3P2EwaAngdEALw_wcB (accessed on 8 October 2022).
- Texas Instruments. TMS320C3x User’s Guide; Texas Instruments: Dallas, TX, USA, 1997. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Only ESS | Hybrid Scheme | ||
|---|---|---|---|---|
| Specification | ESS | Braking Resistor | ||
| Power rating | 2 MW | 0.6 MW | 1.4 MW | |
| Unit rating | 4.8 kW [38] | 4.8 kW [38] | 125 kW [39] | |
| Unit price | $526 [38] | $526 [38] | $1145 [39] | |
| Number of units | 417 | 125 | 12 | |
| Total cost | $219,342 | $79,490 | ||
| Parameters | Values |
|---|---|
| Power rating | 2 MW |
| Turbine rotor radius | 42 m |
| Turbine inertia constant | 4.2 s |
| Generator voltage | 690 V |
| Resistance/inductance | 8.56 mΩ/3.59 mH |
| Number of pole pairs | 60 |
| Generator inertia | 0.75 s |
| Parameters | Values |
|---|---|
| Ratings | 6.37 MJ/0.6 MW |
| Capacitance of EDLC | 200 F |
| Inductor (Lf) | 0.5 mH |
| Operating voltage (VESS) | 0.4 kV |
| Pbc-rated | 1.133 MW |
| Rbc | 1.49 Ω |
| Parameters | Values |
|---|---|
| Power rating | 2.68 kW |
| Number of pole pairs | 3 |
| Speed rating | 1200 rpm |
| Inertia of WTS | 0.071 kg.m2 |
| Stator resistance/inductance | 0.49 /5.35 mH |
| Boost inductance | 3.17 mH |
| Capacitance of ESSs | 2.92 F |
| Operating voltage | 120 V |
| BR resistance | 23 Ω |
| Converters and Controllers | Gains | |
|---|---|---|
| GSC | DC-link voltage controller | |
| Current controllers | ||
| MSC | Speed controller | |
| Current controllers | ||
| DC/DC converter | Power controller | |
| Current controller | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.H.; Nawaz, A.; Sreekumar, P.; Natsheh, A.; Akre, V.; Van, T.L. Implementation and Validation for Multitasks of a Cost-Effective Scheme Based on ESS and Braking Resistors in PMSG Wind Turbine Systems. Energies 2022, 15, 8282. https://doi.org/10.3390/en15218282
Nguyen TH, Nawaz A, Sreekumar P, Natsheh A, Akre V, Van TL. Implementation and Validation for Multitasks of a Cost-Effective Scheme Based on ESS and Braking Resistors in PMSG Wind Turbine Systems. Energies. 2022; 15(21):8282. https://doi.org/10.3390/en15218282
Chicago/Turabian StyleNguyen, Thanh Hai, Asif Nawaz, Preetha Sreekumar, Ammar Natsheh, Vishwesh Akre, and Tan Luong Van. 2022. "Implementation and Validation for Multitasks of a Cost-Effective Scheme Based on ESS and Braking Resistors in PMSG Wind Turbine Systems" Energies 15, no. 21: 8282. https://doi.org/10.3390/en15218282