
Equivalent Inertia Estimation of Asynchronous Motor and Its Effect on Power System Frequency Response


Abstract
:1. Introduction
2. Amplitude-Phase Motion Equation Based on Potential after Transient Reactance
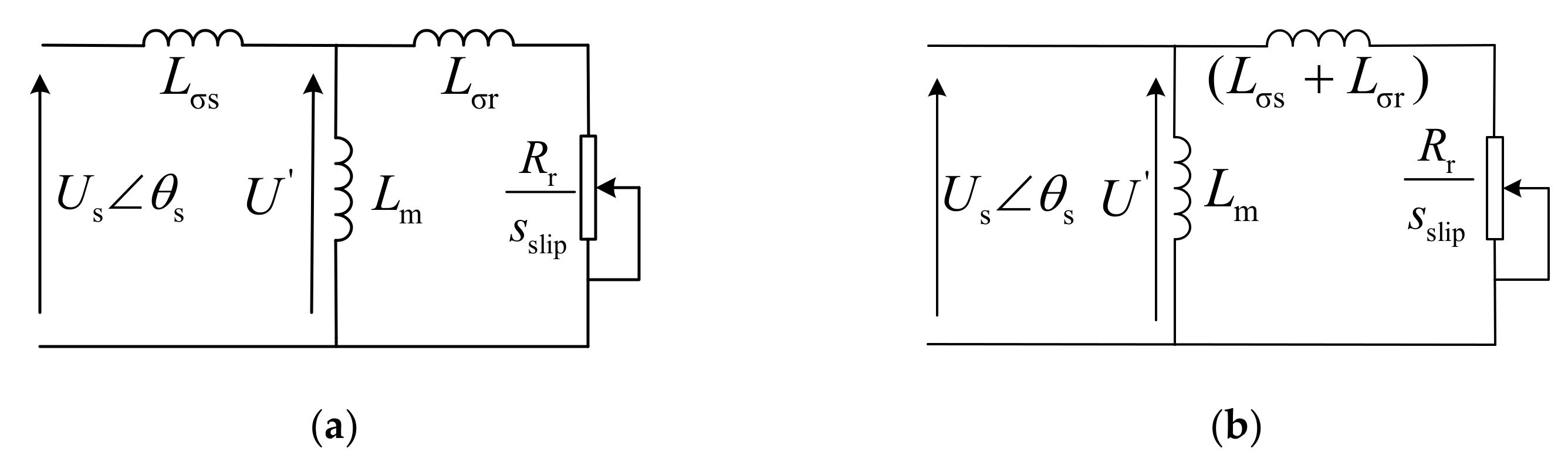
2.1. Model Derivation
2.2. Model Analysis and Definition of Equivalent Inertia Him
3. Equivalent Inertia Estimation of Asynchronous Motors in Electromechanical Time Scales
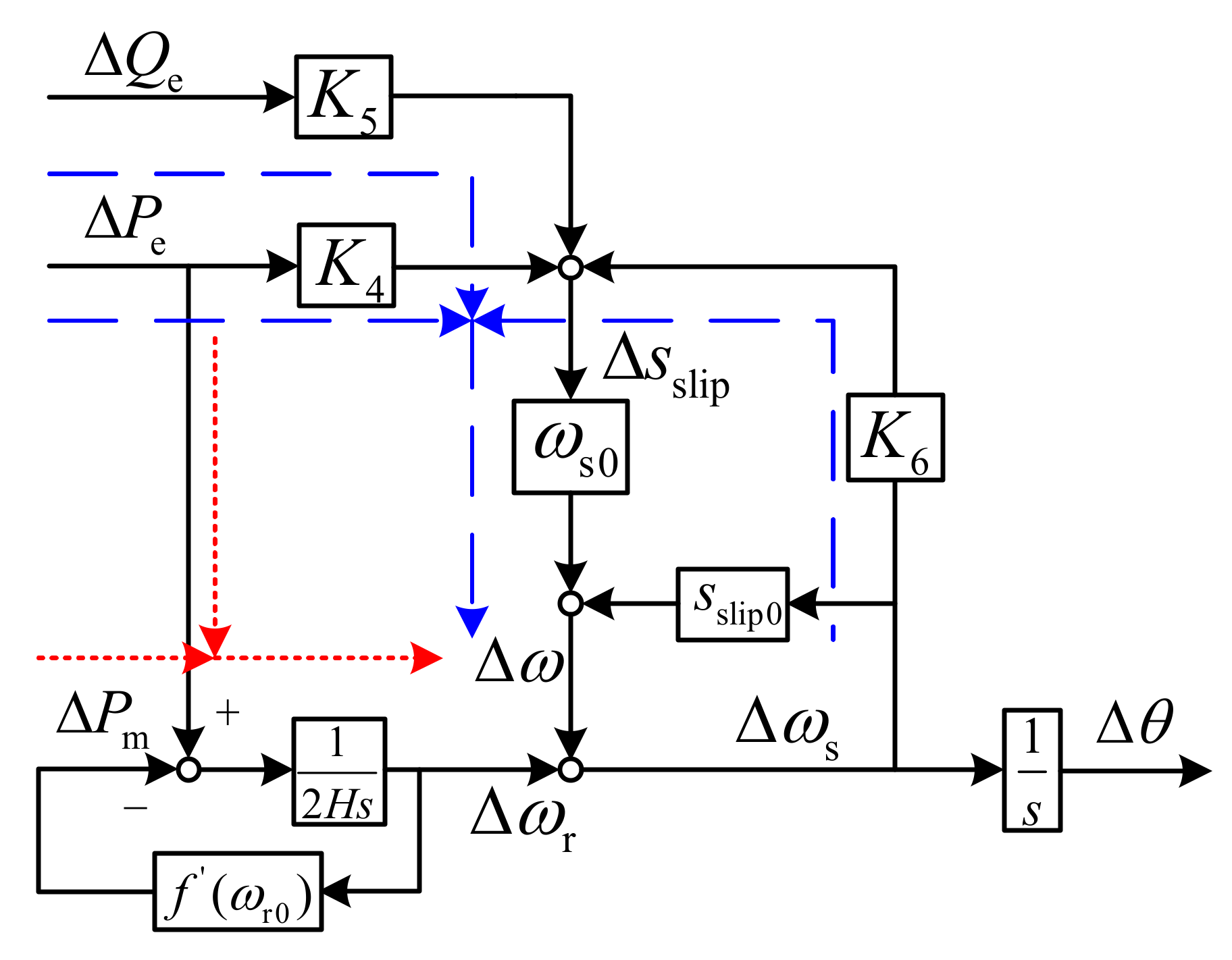
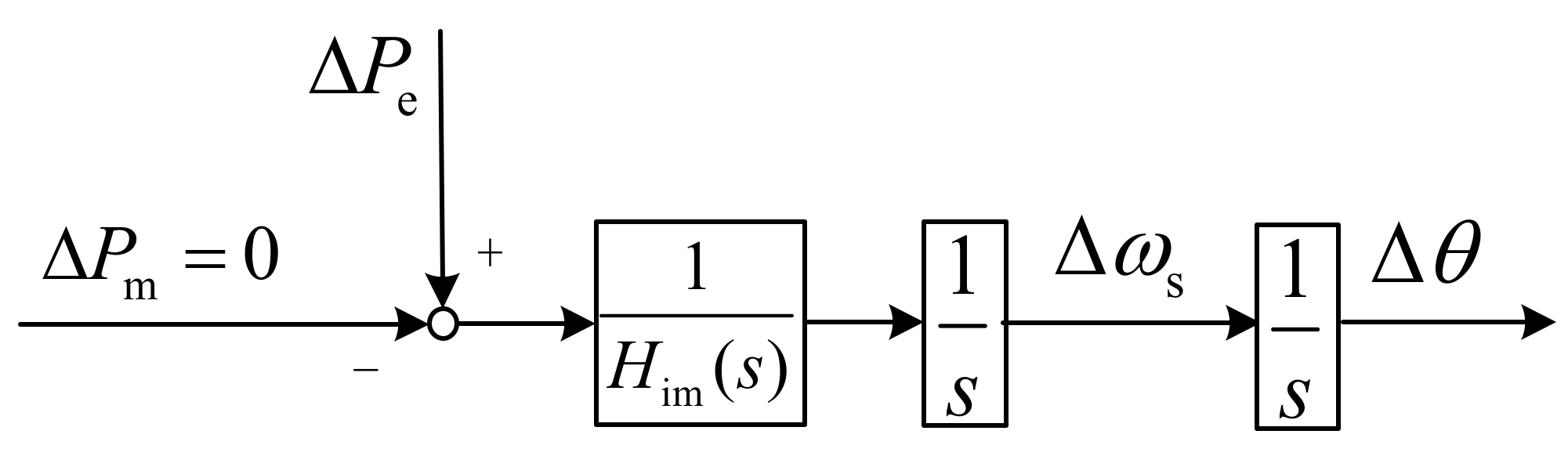
3.1. Small-Signal Modeling of the Phase Motion Equation of Potential after Transient Reactance
3.2. Equivalent Inertia Analysis of Asynchronous Motor
4. Effect of Equivalent Inertia of Asynchronous Motor on Frequency Characteristics of Black-Start System
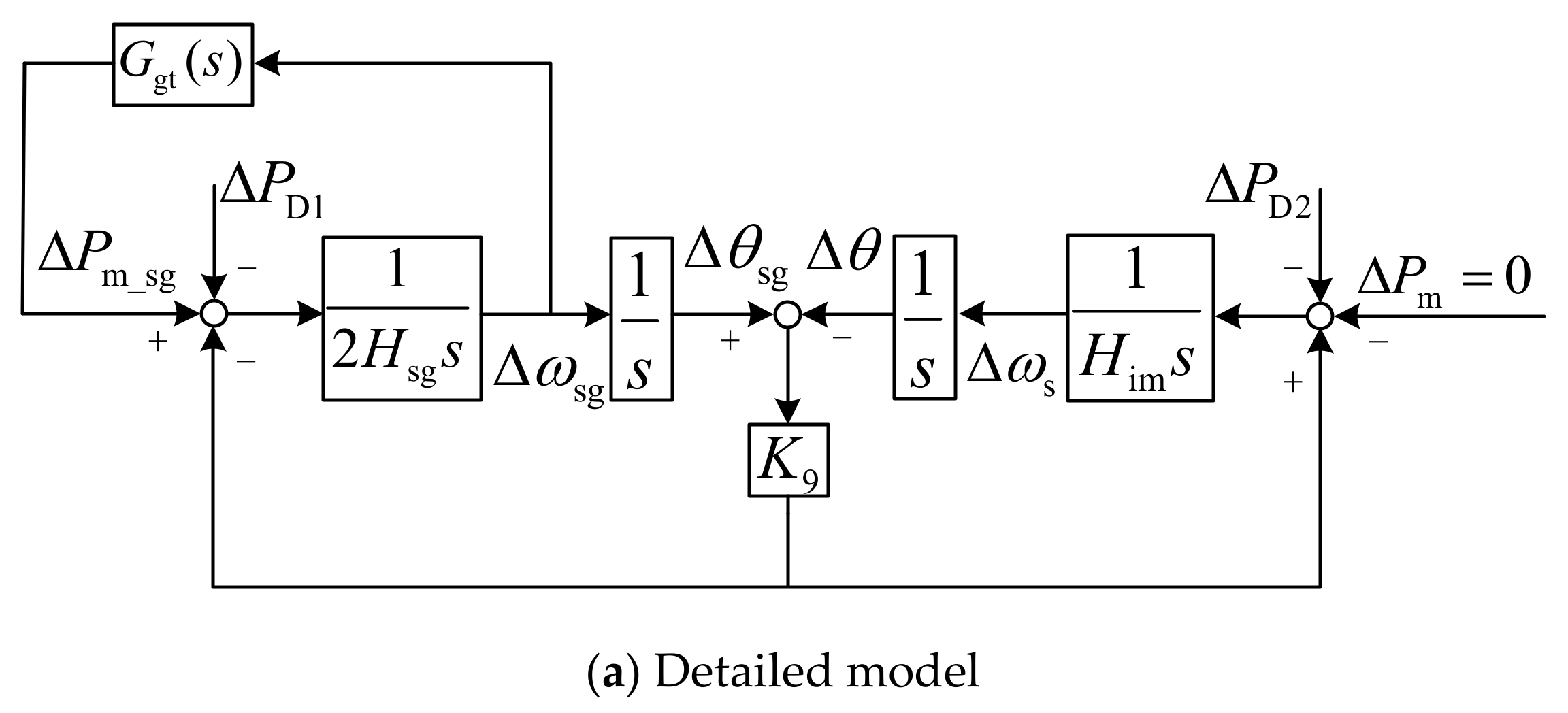
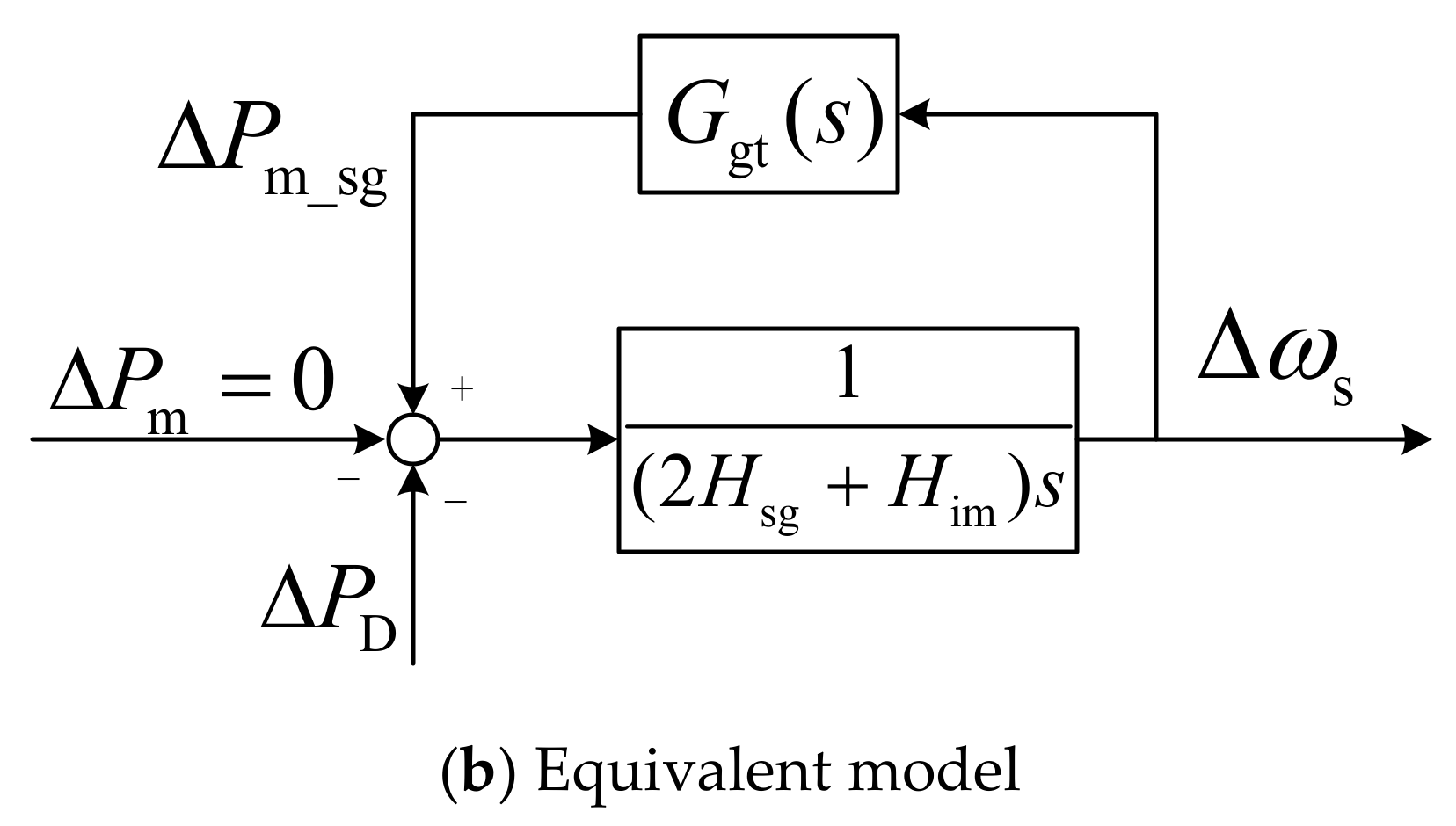
4.1. System Frequency Response Model
4.2. Effect of Asynchronous Motor on System Frequency Characteristics
- (1)
- The maximum rate of change of frequency.
- (2)
- The steady-state frequency deviation.
- (3)
- The maximum frequency deviation.
4.3. Theoretical Analysis
5. Simulation Validation
5.1. Simulation Validation of the Equivalent Inertia of Asynchronous Motor
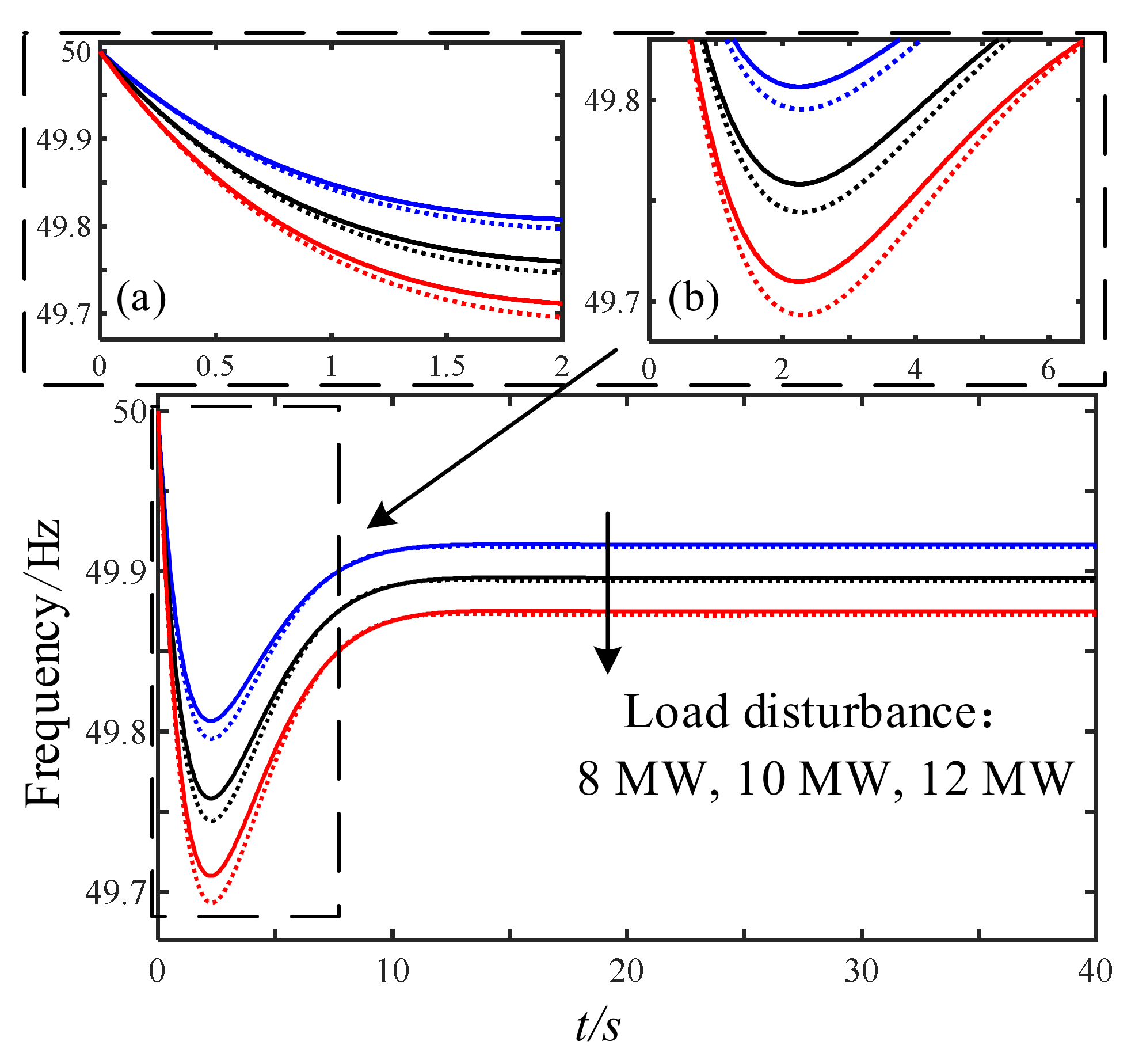
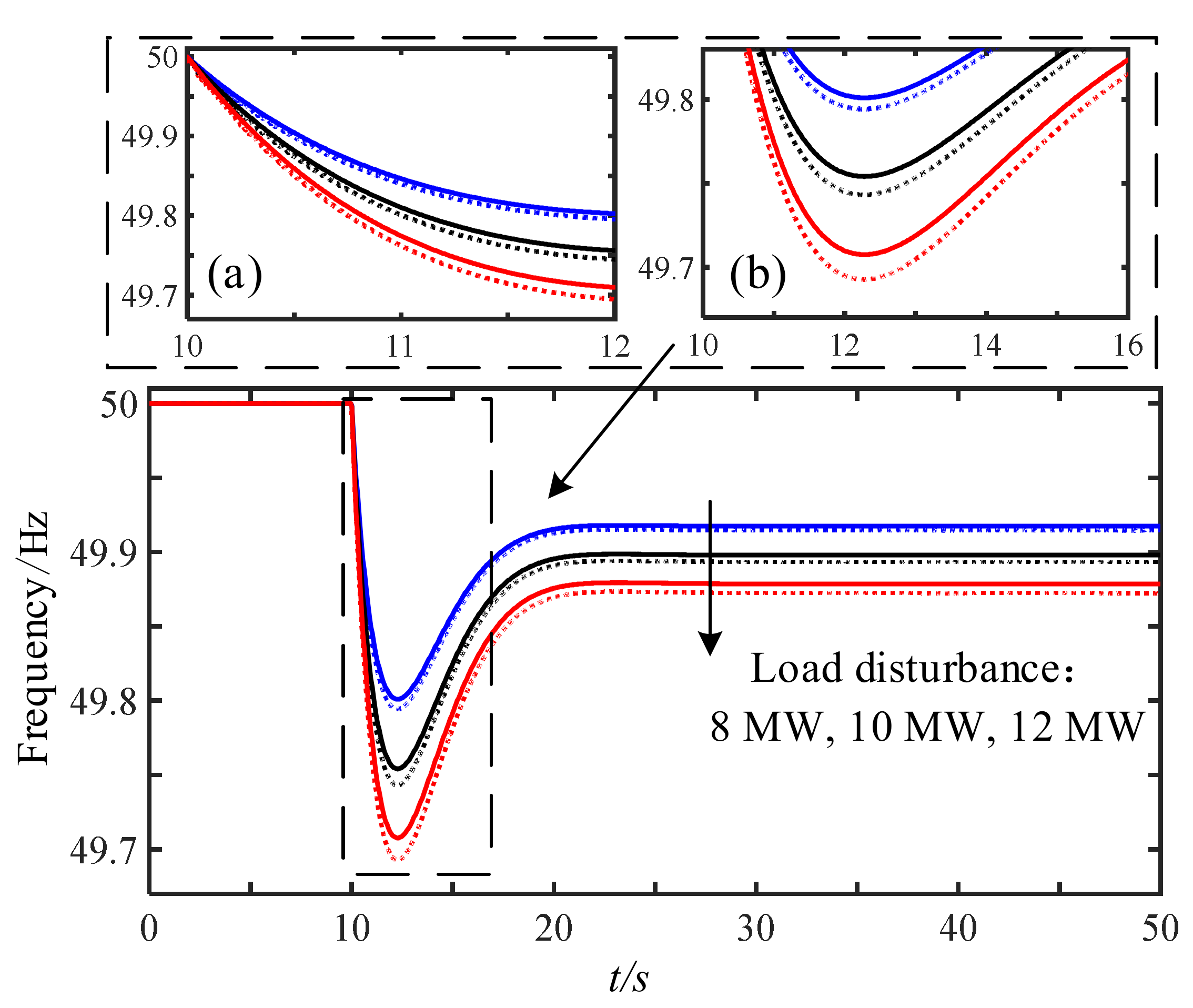
5.2. Simulation Validation of the Effect of Asynchronous Motor Equivalent Inertia on the System Frequency Characteristics during Black-Start
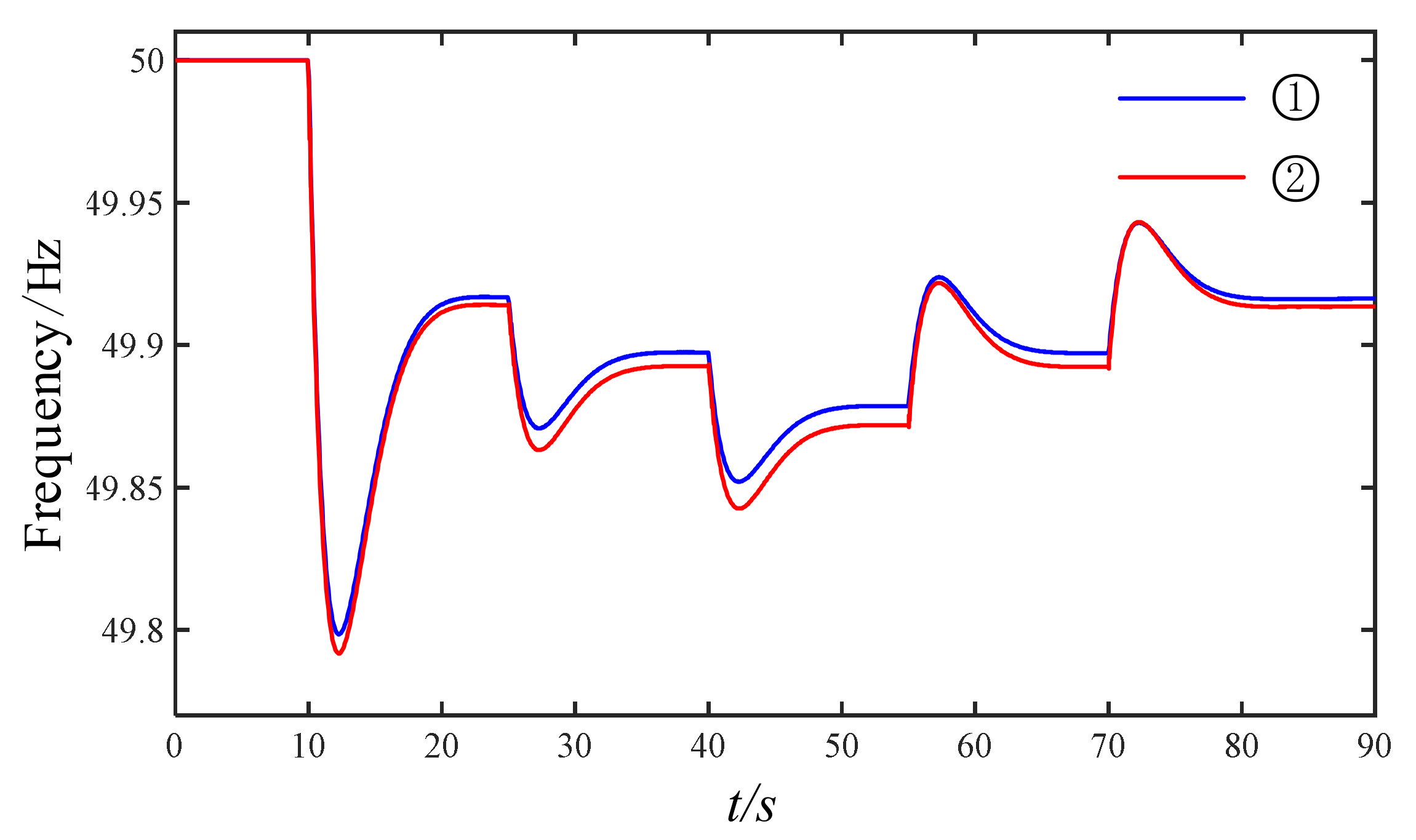
5.3. Simulation Validation of the Effect of Asynchronous Motor Equivalent Inertia on the System Frequency Characteristics when Wind Power Is Considered
6. Conclusions
- (1)
- Different from the inertia time constant, the effect of asynchronous motor equivalent inertia on the system frequency characteristics is time-varying due to the joint action of rotor speed and slip frequency.
- (2)
- In addition to the operating point, the effect of asynchronous motor equivalent inertia on the maximum rate of change of frequency and the maximum frequency deviation are determined by the rotor resistance and the inertial time constant. Smaller rotor resistance and larger inertial time constant can reduce the maximum rate of change of frequency and the maximum frequency deviation. In addition, the larger the mechanical load coefficient, the better the steady-state frequency deviation.
- (3)
- For the frequency stability problem, this paper illustrates that the equivalent inertia of asynchronous motors can essentially improve the system frequency characteristics, and clearly points out the error direction when the equivalent inertia of asynchronous motors is ignored, so that the load inertia of asynchronous motors can be considered in frequency stability analysis to obtain more realistic results.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Kayikci, M.; Milanovic, J.V. Dynamic Contribution of DFIG-Based Wind Plants to System Frequency Disturbances. IEEE Trans. Power Syst. 2009, 24, 859–867. [Google Scholar] [CrossRef]
- Ekanayake, J.; Jenkins, N. Comparison of the response of doubly fed and fixed-speed induction generator wind turbines to changes in network frequency. IEEE Trans. Energy Convers. 2018, 19, 800–802. [Google Scholar] [CrossRef]
- Delille, G.; Francois, B.; Malarange, G. Dynamic Frequency Control Support by Energy Storage to Reduce the Impact of Wind and Solar Generation on Isolated Power System’s Inertia. IEEE Trans. Sustain. Energy 2012, 3, 931–939. [Google Scholar] [CrossRef]
- Tielens, P.; Van Hertem, D. The relevance of inertia in power systems. Renew. Sustain. Energy Rev. 2016, 55, 999–1009. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Heylen, E.; Teng, F.; Strbac, G. Challenges and opportunities of inertia estimation and forecasting in low-inertia power systems. Renew. Sustain. Energy Rev. 2021, 147, 111176. [Google Scholar] [CrossRef]
- Wang, B.; Sun, H.; Li, W.; Yang, C.; Wei, W.; Zhao, B.; Xu, S. Power system inertia estimation method based on maximum frequency deviation. IET Renew. Power Gener. 2022, 16, 622–633. [Google Scholar] [CrossRef]
- Morren, J.; Pierik, J.; De Haan, S.W.H. Inertial response of variable speed wind turbines. Electr. Power Syst. Res. 2006, 76, 980–987. [Google Scholar] [CrossRef]
- Keung, P.K.; Li, P.; Banakar, H.; Ooi, B.T. Kinetic energy of wind-turbine generators for system frequency support. IEEE Trans. Power Syst. 2008, 24, 279–287. [Google Scholar] [CrossRef]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Pradhan, C.; Bhende, C.N. Frequency sensitivity analysis of load damping coefficient in wind farm-integrated power system. IEEE Trans. Power Syst. 2016, 32, 1016–1029. [Google Scholar]
- Chen, L.; Wang, X.; Min, Y.; Li, G.; Wang, L.; Qi, J.; Xu, F. Modelling and investigating the impact of asynchronous inertia of induction motor on power system frequency response. Int. J. Electr. Power Energy Syst. 2020, 117, 105708. [Google Scholar] [CrossRef]
- Inoue, T.; Taniguchi, H.; Ikeguchi, Y.; Yoshida, K. Estimation of power system inertia constant and capacity of spinning-reserve support generators using measured frequency transients. IEEE Trans. Power Syst. 1997, 12, 136–143. [Google Scholar] [CrossRef]
- Tavakoli, M.R.B.; Power, M.; Ruttledge, L.; Flynn, D. Load inertia estimation using white and grey-box estimators for power systems with high wind penetration. IFAC Proc. Vol. 2012, 45, 399–404. [Google Scholar] [CrossRef]
- Wang, D.; Yuan, X.; Shen, Y.; Cui, T.; Hu, Z.; Cao, W.; Li, L. Available Inertia Estimation of Induction Machine and Its Effect on Frequency Response of Power Systems with Wind Penetration. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies-Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 1783–1787. [Google Scholar]
- Nomikos, B.M.; Vournas, C.D. Investigation of induction machine contribution to power system oscillations. IEEE Trans. Power Syst. 2005, 20, 916–925. [Google Scholar] [CrossRef]
- Van Cutsem, T.; Vournas, C. Voltage Stability of Electric Power Systems; Springer Science & Business Media: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Sigrist, L.; Rouco, L. An induction motor model for system frequency response models. Int. Trans. Electr. Energy Syst. 2017, 27, e2413. [Google Scholar] [CrossRef]
- Aik, D.L.H. A general-order system frequency response model incorporating load shedding: Analytic modeling and applications. IEEE Trans. Power Syst. 2006, 21, 709–717. [Google Scholar] [CrossRef]
- Hu, J.; Sun, L.; Yuan, X.; Wang, S.; Chi, Y. Modeling of type 3 wind turbines with df/dt inertia control for system frequency response study. IEEE Trans. Power Syst. 2016, 32, 2799–2809. [Google Scholar] [CrossRef]
- Anderson, P.M.; Mirheydar, M. A low-order system frequency response model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Pn/MVA | 100 | Lg/H | 1.36 |
| Vn/kV | 16.5 | Rr/Ω | 4.929 |
| Lr/H | 0.1139 | H/s | 1.5 |
| Lm/H | 0.1098 | P0 | 0.5 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Pn/MVA | 247.5 | X1/pu | 0.15 |
| Vn/kV | 16.5 | Td0′/pu | 8.0 |
| Xd/pu | 1.81 | Td0′/pu | 0.03 |
| Xd′/pu | 0.3 | Tq0′/pu | 1.0 |
| Xd′′/pu | 0.23 | Tq0′/pu | 0.07 |
| Xq/pu | 1.76 | Rs/pu | 0.0379 |
| Xq′/pu | 0.65 | H/s | 3.33 |
| Xq′′/pu | 0.25 | p | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Qin, P.; Tang, Z. Equivalent Inertia Estimation of Asynchronous Motor and Its Effect on Power System Frequency Response. Energies 2022, 15, 8350. https://doi.org/10.3390/en15228350
Zhao X, Qin P, Tang Z. Equivalent Inertia Estimation of Asynchronous Motor and Its Effect on Power System Frequency Response. Energies. 2022; 15(22):8350. https://doi.org/10.3390/en15228350
Chicago/Turabian StyleZhao, Xingyong, Penghui Qin, and Zhen Tang. 2022. "Equivalent Inertia Estimation of Asynchronous Motor and Its Effect on Power System Frequency Response" Energies 15, no. 22: 8350. https://doi.org/10.3390/en15228350