
PID Control of a Superheated Steam Temperature System Based on Integral Gain Scheduling

 ,
, 
 , , and
, , and
Abstract
:1. Introduction
- (1)
- A PID scheme based on the integral-gain scheduling is proposed, which has a scheduling parameter with simple implementation.
- (2)
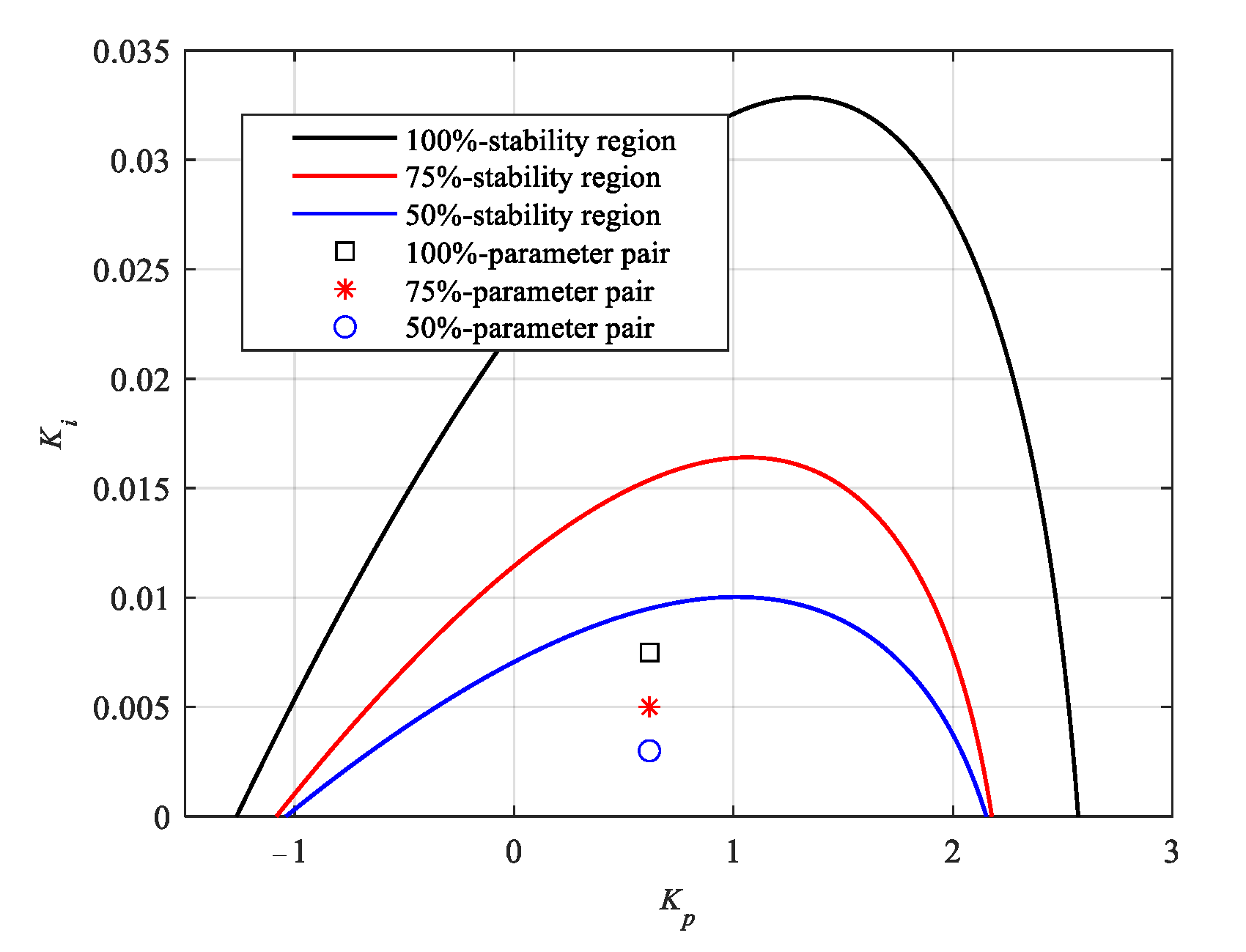
- The parameters of the proposed scheme are analyzed by the calculation of the PID stability region. With reasonable tuning, all parameters of the proposed scheme can located in the stability region.
- (3)
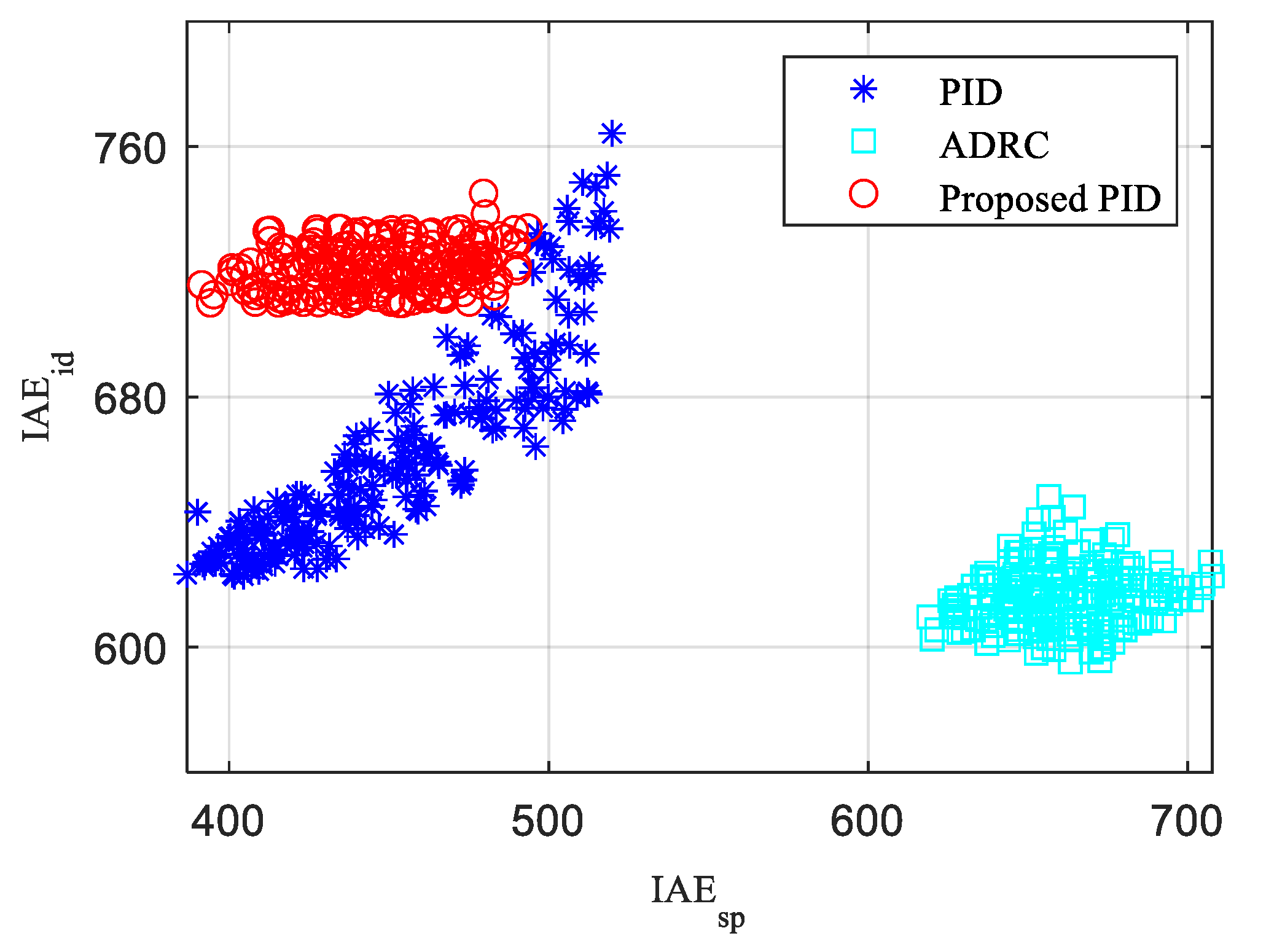
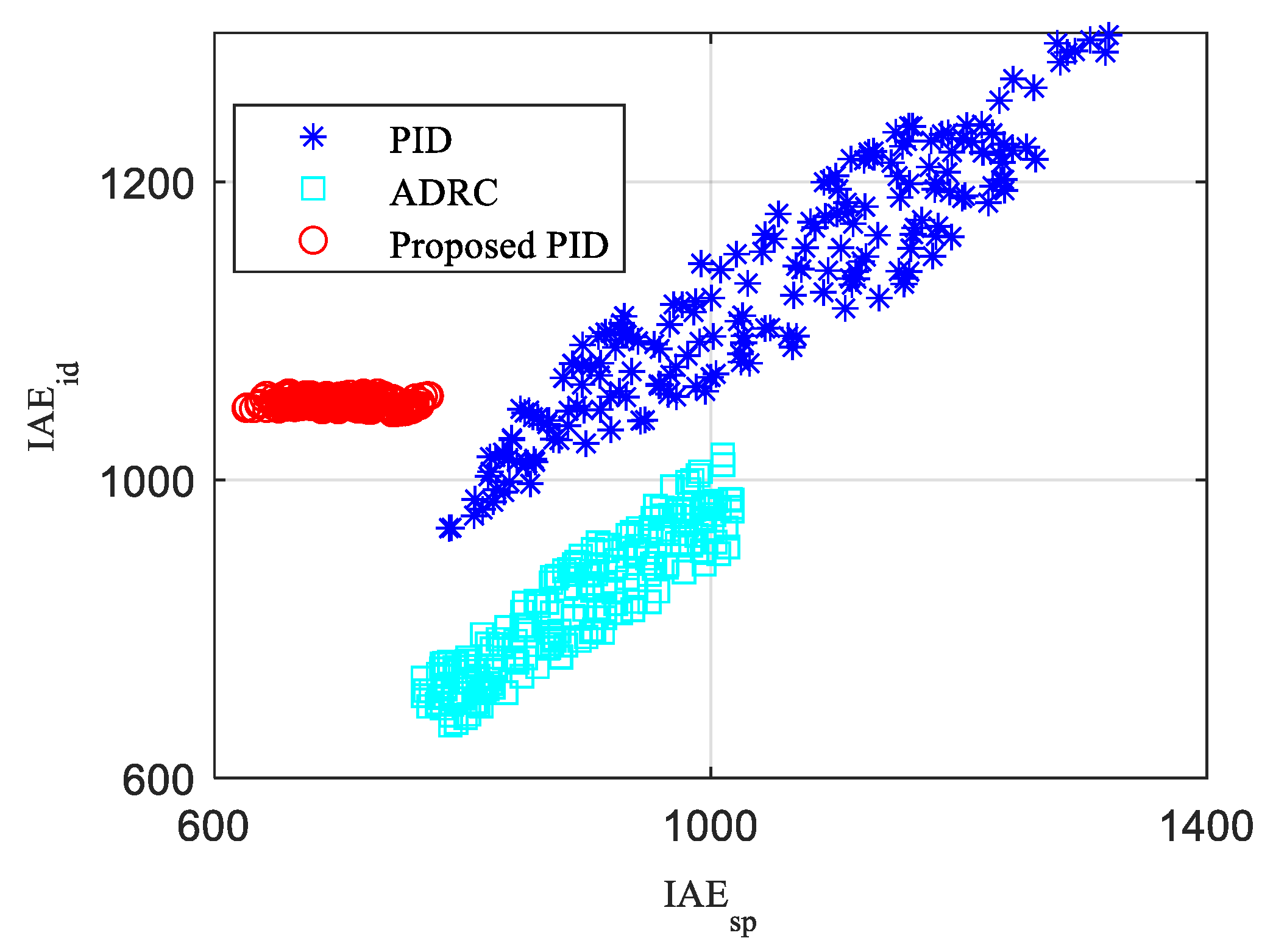
- The advantages in the tracking and disturbance rejection performance of the proposed design scheme are illustrated by comparative simulations under different operating conditions. In addition, Monte Carlo experiments verify the robustness of the proposed scheme.
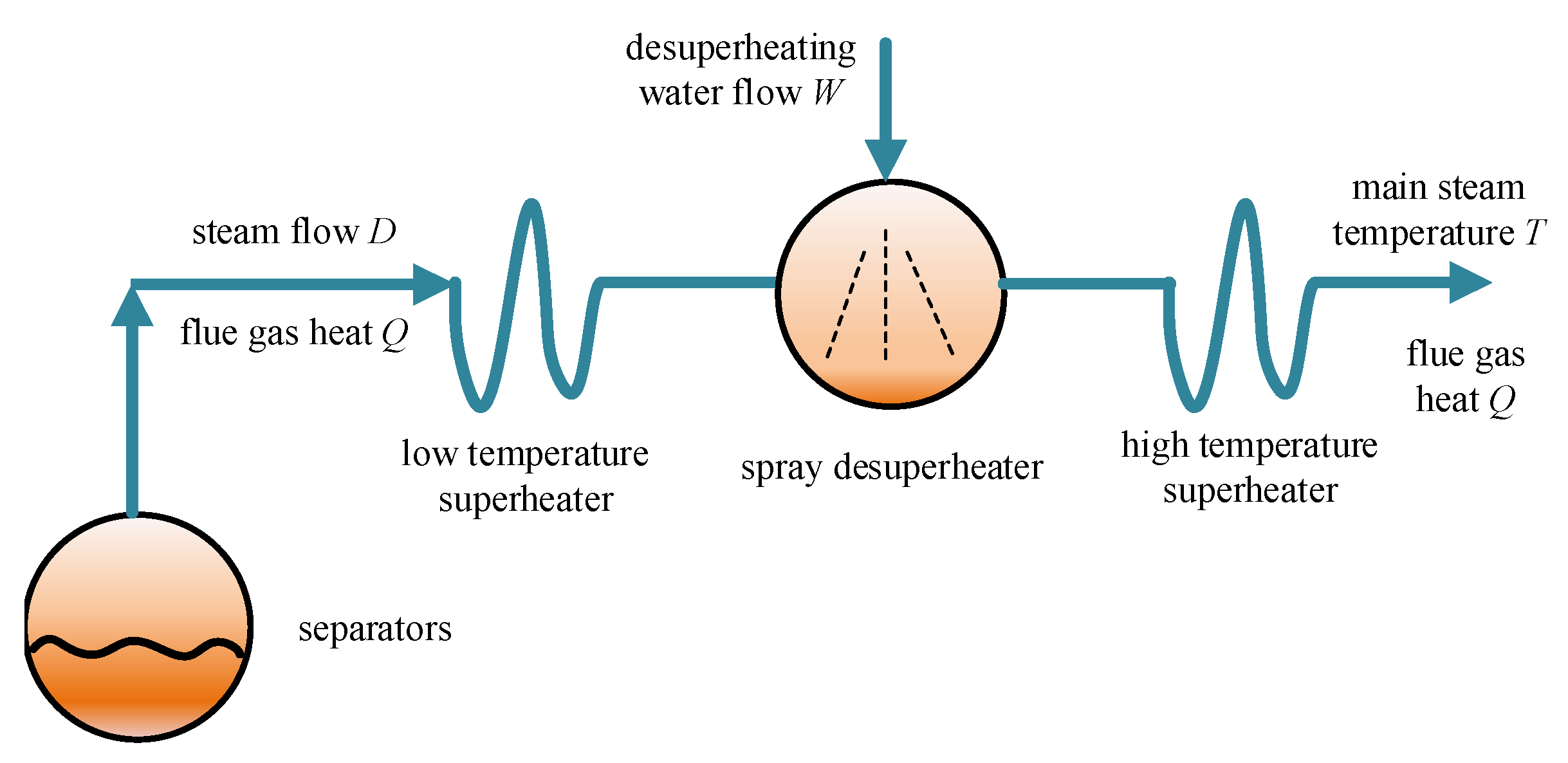
2. Problem Description
3. Control Methods Based on Integral-Gain Scheduling
- (1)
- , the singular boundary iswhere and represent the characteristics of the controlled object. Therefore, the singular value boundary of the PID controller is depicted as .
- (2)
- , the singular value boundary of the PID controller does not exist.
- (3)
- , the non-singular value boundary of the PID controller can be solved by taking the real part and the imaginary part of Equation (11) as zero to obtain the boundary value:
4. Simulation Results
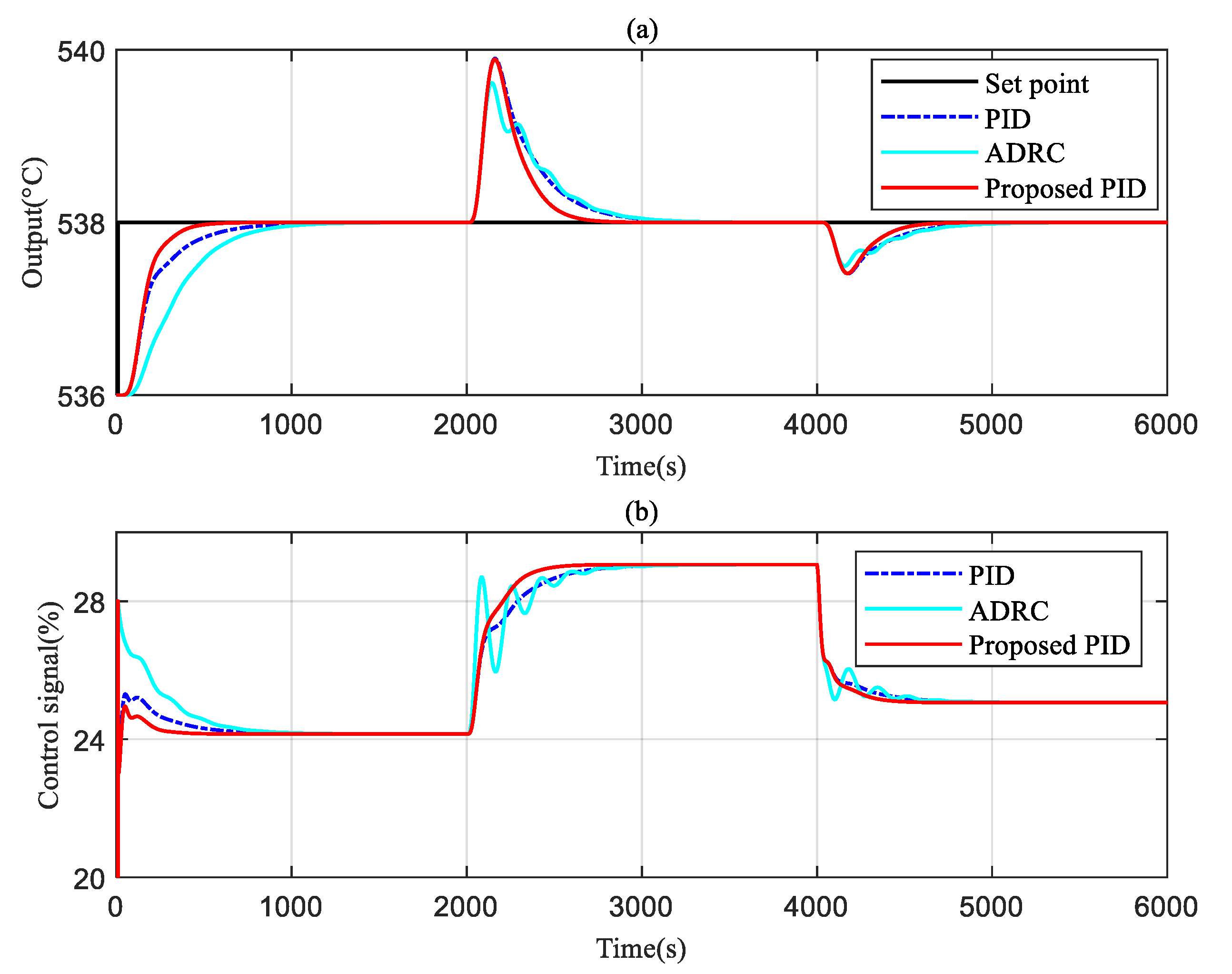
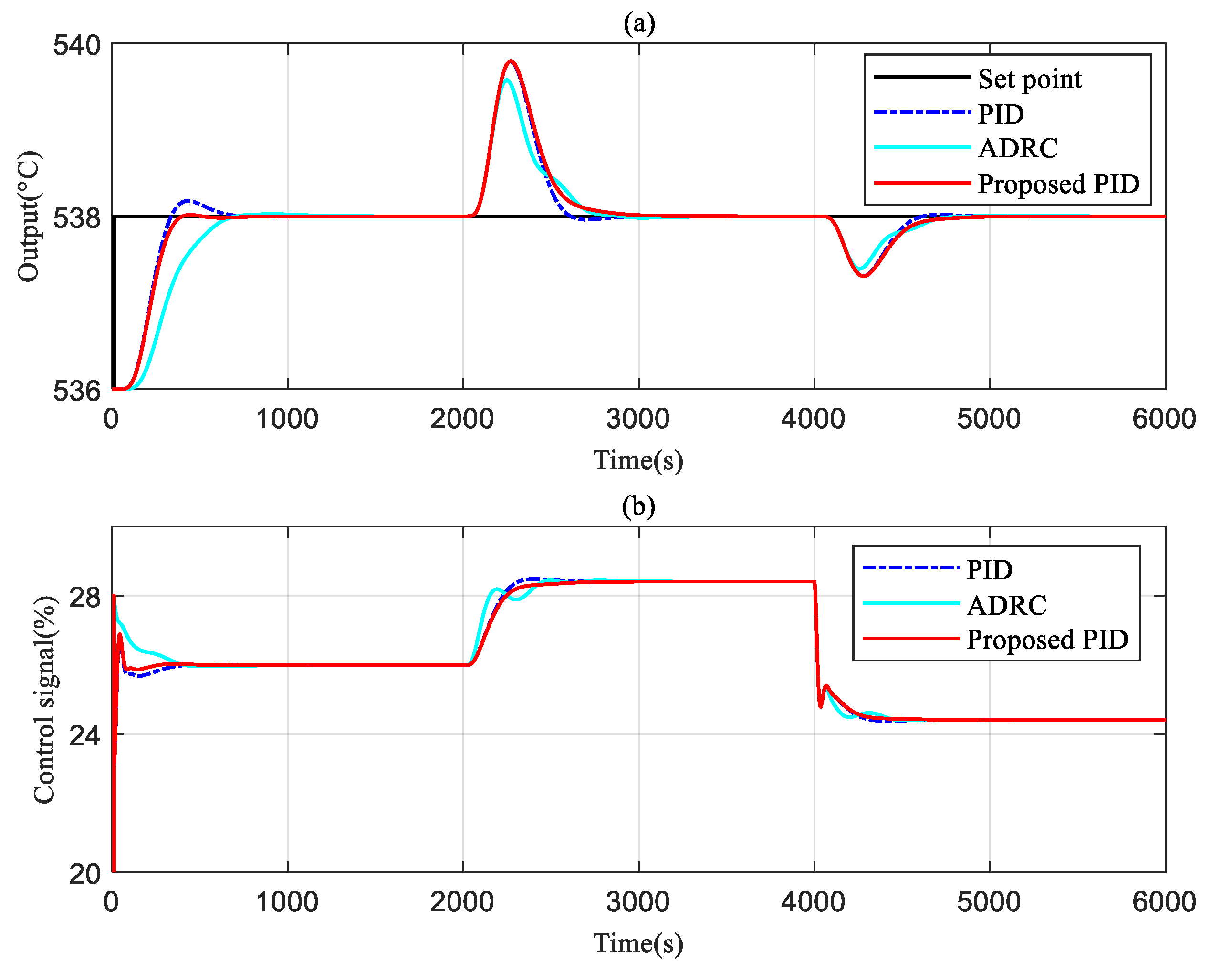
4.1. Control Effect under Nominal Operating Conditions
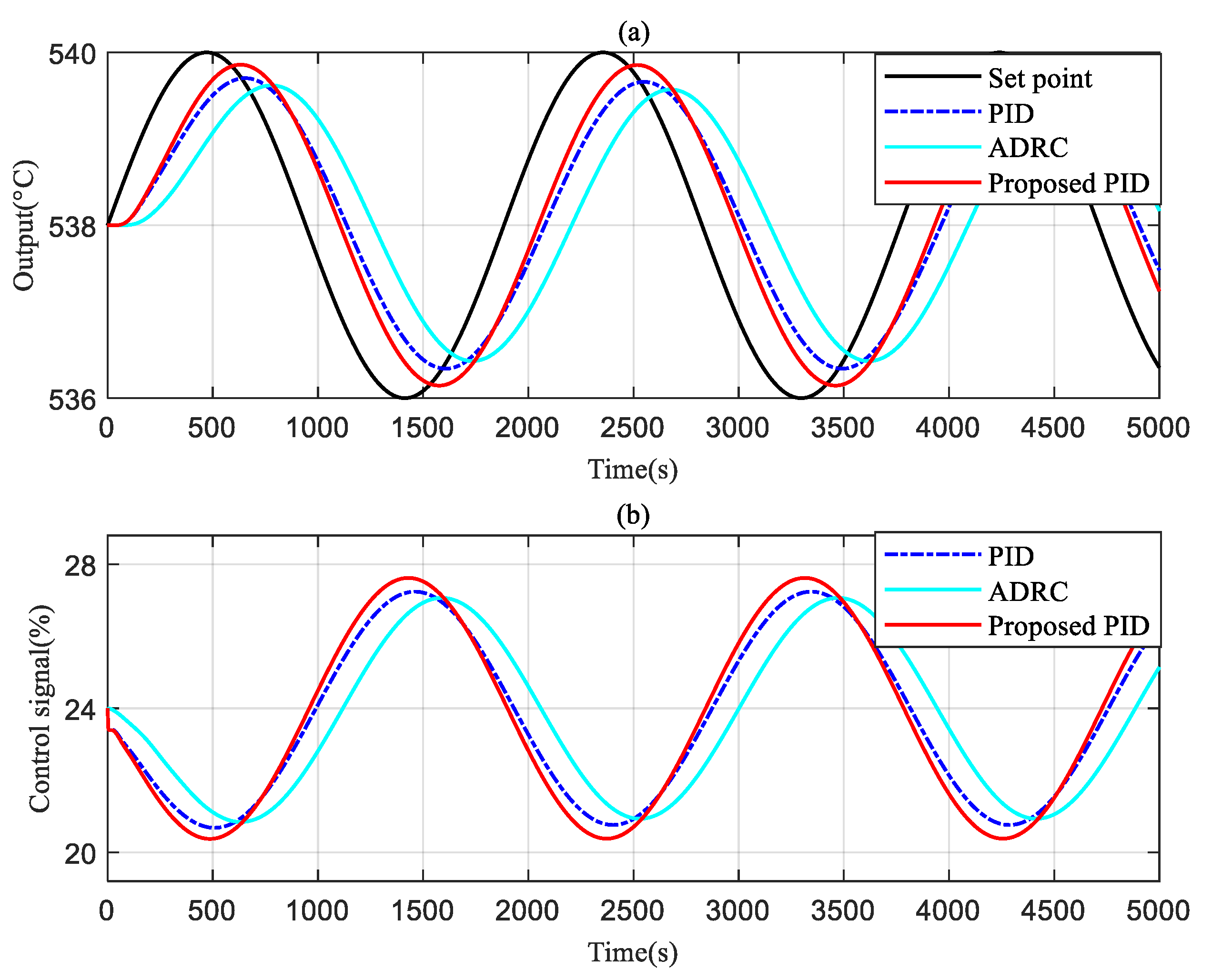
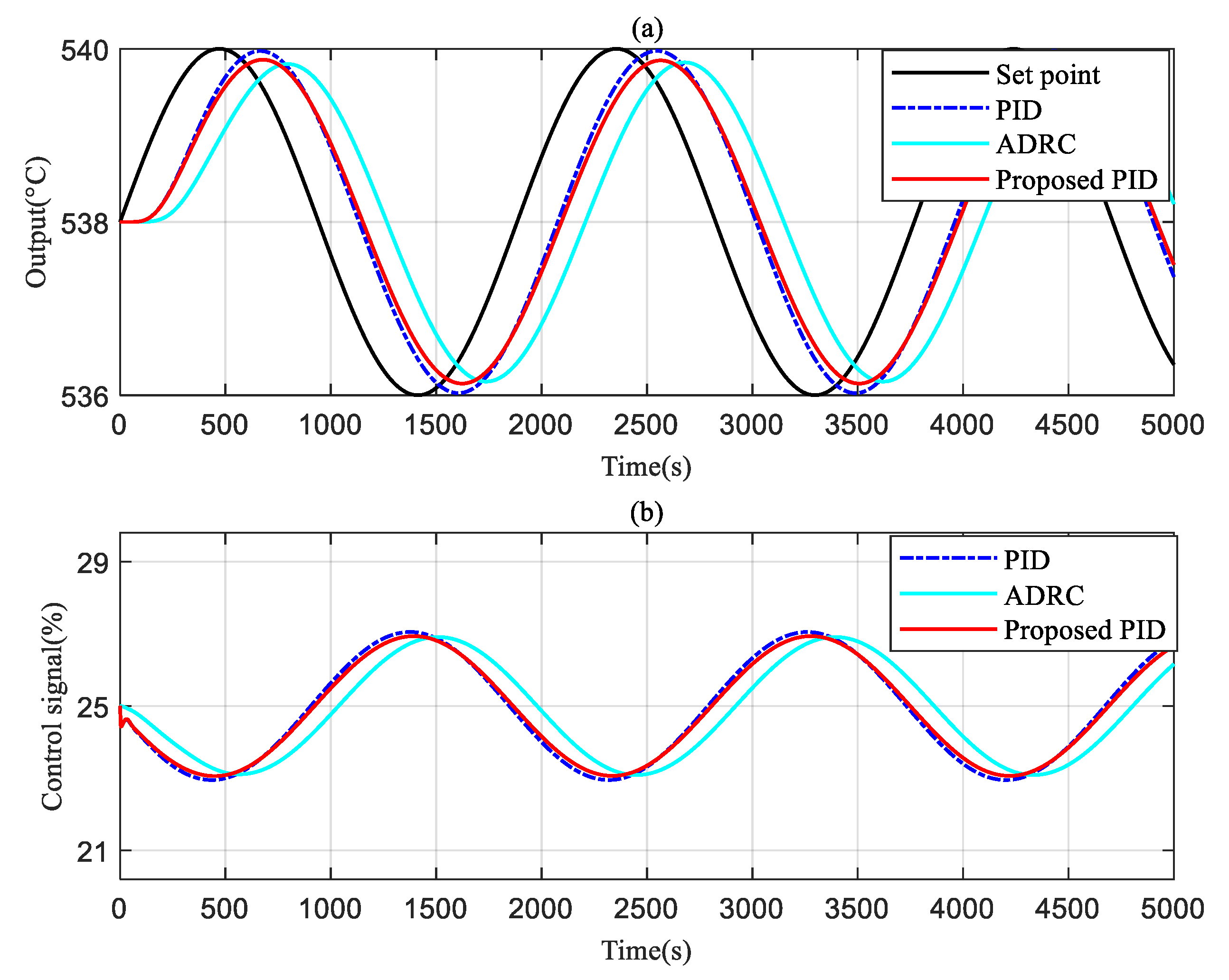
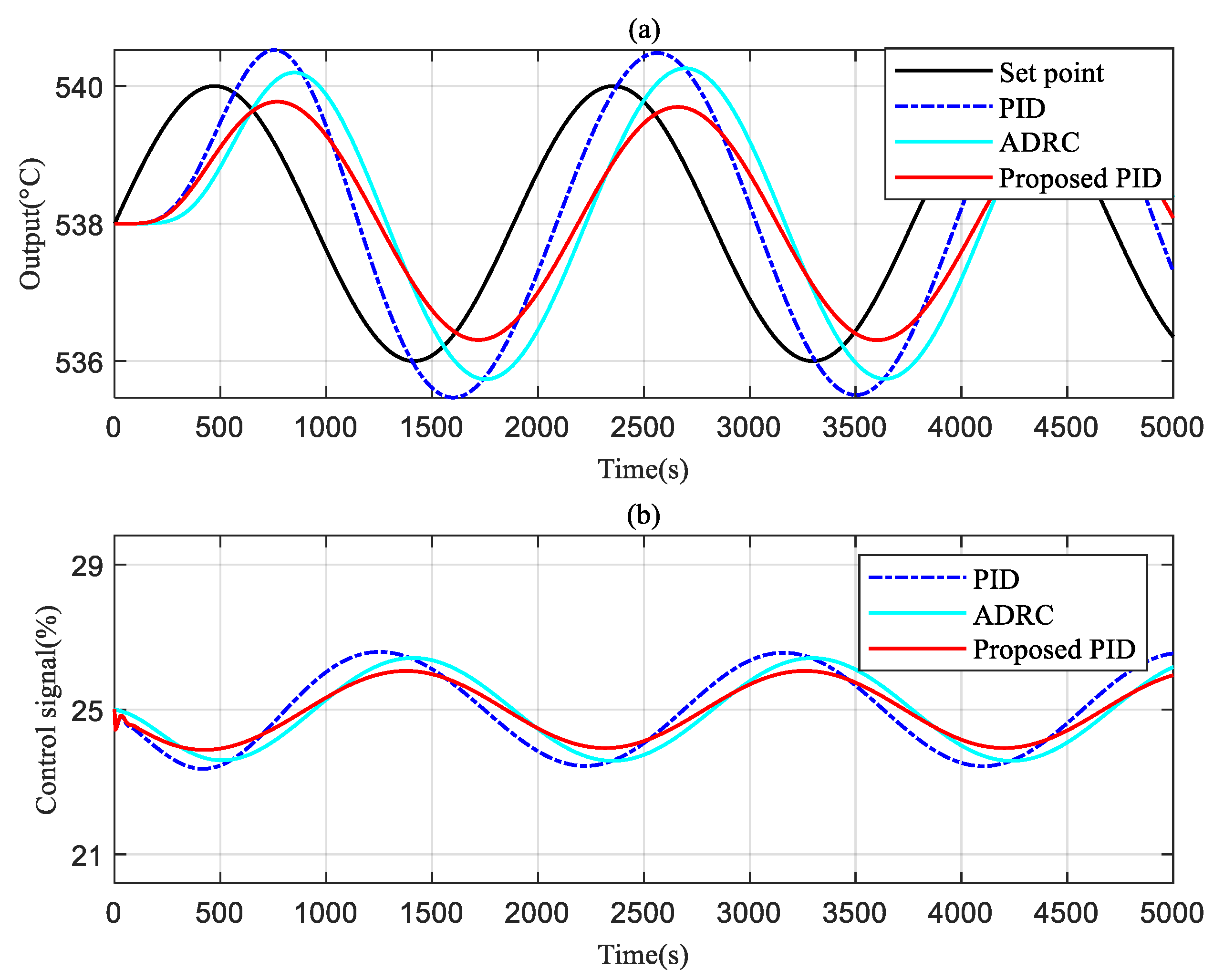
4.2. Control Performance under Uncertain Conditions
5. Discussions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Leading segment | |
| Inert segment | |
| Inner loop controller | |
| Outer loop controller | |
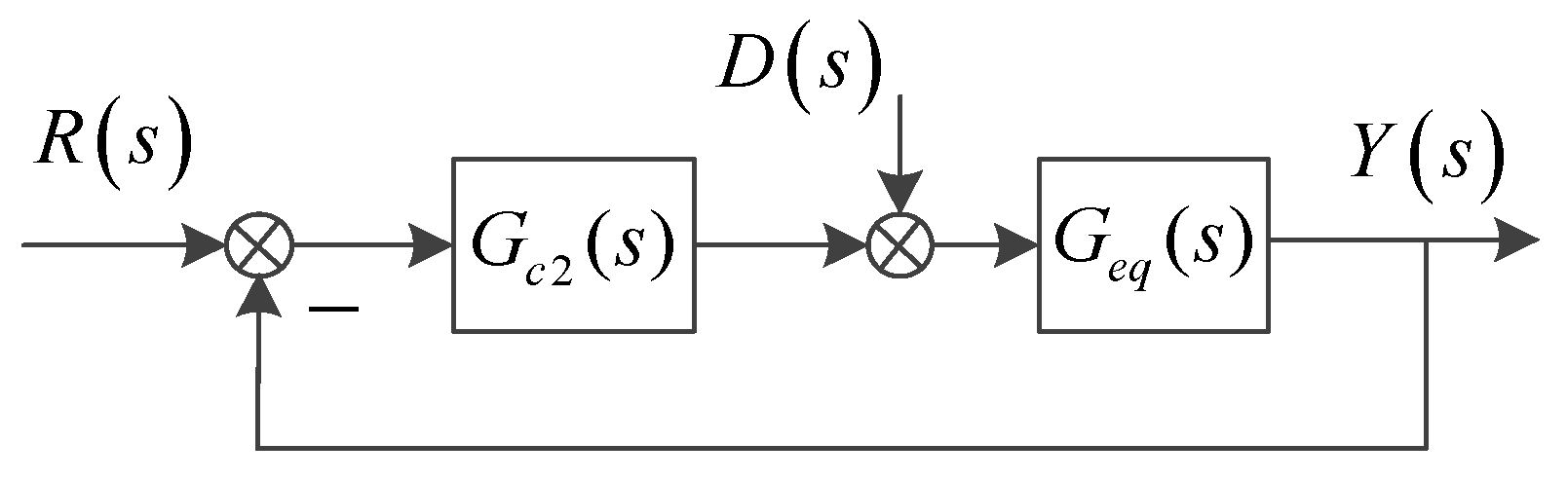
| Equivalent transfer function of the inner loop closed-loop system and the inert zone system | |
| Angular frequency | |
| , | Real part and imaginary part of the controlled object |
| Parameters of ADRC | |
| d1 | Inner loop step disturbance |
| d2 | Outer loop step disturbance |
| Set point of main steam temperature | |
| Main steam temperature | |
| IAE | Integral absolute error |
Appendix A
References
- Wu, Z.L.; Li, D.H.; Xue, Y.L.; Chen, Y.Q. Gain scheduling design based on active disturbance rejection control for thermal power plant under full operating conditions. Energy 2019, 185, 744–762. [Google Scholar] [CrossRef]
- Wu, X.; Li, Y.G.; Shen, J. Fuzzy modeling and predictive control of superheater steam temperature for power plant. ISA Trans. 2015, 56, 241–251. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.L.; He, T.; Li, D.H.; Xue, Y.L.; Sun, L.M. Superheated steam temperature control based on modified active disturbance rejection control. Control. Eng. Pract. 2019, 83, 83–97. [Google Scholar] [CrossRef]
- Du, Z.P.; Fang, Y.F.; Yang, X.F.; Li, J.Z. Design of PI controller for a class of discrete cascade control systems. IEEE Trans. Autom. Sci. Eng. 2022, 1–9. [Google Scholar] [CrossRef]
- Wang, L.B.; Xiao, B.X. PID controller parameters tuning based on pole assignment optimal prediction for power station boiler superheated steam temperature. Int. J. Eng. Technol. 2016, 8, 88–93. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.L.; Li, D.H.; Wang, L.M. Control of the superheated steam temperature: A comparison study between PID and fractional order PID controller. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016. [Google Scholar] [CrossRef]
- Sun, L.; Dong, J.Y.; Li, D.H. Active disturbance rejection control for superheated steam boiler temperatures using the fruit fly algorithm. J. Tsinghua Univ. (Sci. Technol.) 2014, 54, 1288–1292. [Google Scholar] [CrossRef]
- Sun, L.; Hua, Q.S.; Shen, J.; Xue, Y.L.; Li, D.H.; Lee, K.Y. Multi-objective optimization for advanced superheater steam temperature control in a 300 MW power plant. Appl. Energy 2017, 208, 592–606. [Google Scholar] [CrossRef]
- He, T.; Wu, Z.L.; Li, D.H.; Wang, J.H. A tuning method of active disturbance rejection control for a class of high-order processes. IEEE Trans. Ind. Electron. 2020, 67, 3191–3201. [Google Scholar] [CrossRef] [Green Version]
- Shi, G.J.; Wu, Z.L.; Guo, J.; Li, D.H.; Ding, Y.J. Superheated steam temperature control based on a hybrid active disturbance rejection control. Energies 2020, 13, 1757. [Google Scholar] [CrossRef]
- Hao, Y.S.; Chen, Z.; Sun, L.; Liang, J.; Zhu, H. Multi-objective intelligent optimization of superheated steam temperature control based on cascaded disturbance observer. Sustainability 2020, 12, 1–24. [Google Scholar] [CrossRef]
- Alamoodi, N.; Daoutidis, P. Nonlinear control of coal-fired steam power plants. Control. Eng. Pract. 2017, 60, 63–75. [Google Scholar] [CrossRef]
- Wang, Y.L. Nonlinear adaptive control for superheated steam temperature based on interpolation and fitting technique. J. Eng. Therm. Energy Power 2018, 33, 21–25. [Google Scholar] [CrossRef]
- Guo, W.; Zhang, P.C.; Li, T.; Zhu, C.P. ARX-Laguerre model PID predictive control and its application in superheated steam temperature control. Control. Eng. China 2021, 28, 524–530. [Google Scholar] [CrossRef]
- Lian, L. Main steam temperature control based on variable universe fuzzy dynamic matrix control. Therm. Eng. 2022, 69, 763–778. [Google Scholar] [CrossRef]
- Tong, S.; Liu, L.; Wang, P.F. Coordinative two-stage superheated steam temperature linkage control based on multivariable generalized predictive control algorithm. Electr. Power 2020, 53, 215–223. [Google Scholar]
- Qu, X.F.; Lv, J.H. Reheat steam temperature prediction and control based on iterative learning algorithm for ultra-supercritical units under deep peak shaving. J. Chin. Soc. Power Eng. 2020, 40, 614–620, 634. [Google Scholar] [CrossRef]
- Li, X.M.; Yu, X.H. Robust regulation for superheated steam temperature control based on data-driven feedback compensation. Appl. Energy 2022, 325, 119918. [Google Scholar] [CrossRef]
- Chen, Z.; Hao, Y.S.; Sun, L.; Su, Z.G. Phase compensation based active disturbance rejection control for high order superheated steam temperature system. Control. Eng. Pract. 2022, 126, 105200. [Google Scholar] [CrossRef]
- Yu, L.; Zhang, C.; Huang, J.; Fei, S.M. Discrete-time sliding-mode switching control scheme with disturbance observer and its application to superheated steam temperature systems. J. Dyn. Syst. Meas. Control.-Trans. ASME 2022, 138, 101003. [Google Scholar] [CrossRef]
- Liang, W.P.; Zhang, X. Fuzzy-PID control system of main steam temperature based on intermediate point temperature feedforward. Electr. Power Sci. Eng. 2019, 35, 72–78. [Google Scholar] [CrossRef]
- Tu, X.; Shi, J.K.; Yao, K.; Wan, J.; Qiao, F. State variable-fuzzy prediction control strategy for superheated steam temperature of thermal power units. Therm. Sci. 2021, 25, 4083–4090. [Google Scholar] [CrossRef]
- Ma, L.Y.; Yan, M. Application of neural network inverse control with PID compensation in superheated steam temperature control of supercritical boiler unit. J. Eng. Therm. Energy Power 2020, 35, 178–184. [Google Scholar] [CrossRef]
- Zhan, J.S.; Du, J.; Dong, S.F.; Hu, W. Superheated steam temperature system of thermal power control engineering based on neural network local multi-model prediction. Therm. Sci. 2021, 25, 2949–2956. [Google Scholar] [CrossRef]
- Wu, Z.L.; Liu, Y.H.; Li, D.H.; Chen, Y.Q. Performance analysis of improved ADRCs for a class of high-order processes with verification on main steam pressure control. IEEE Trans. Ind. Electron. 2022, 1–10. [Google Scholar] [CrossRef]
- Draganescu, M.; Guo, S.; Wojcik, J.; Wang, J.H.; Liu, X.J.; Hou, G.L.; Xue, Y.L.; Gao, Q.R. Generalized predictive control for superheated steam temperature regulation in a supercritical coal-fired power plant. CSEE J. Power Energy Syst. 2015, 1, 69–77. [Google Scholar] [CrossRef]
- Wu, Z.L.; Li, D.H.; Xue, Y.L. A new PID controller design with constraints on relative delay margin for first-order plus dead-time systems. Processes 2019, 7, 713. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Guo, L. Towards a theoretical foundation of PID control for uncertain nonlinear systems. Automatica 2022, 142, 110360. [Google Scholar] [CrossRef]
- Astrom, K.J.; Kumar, P.R. Control: A perspective. Automatica 2014, 50, 3–43. [Google Scholar] [CrossRef]
- Zhao, C.; Guo, L. PID controller design for second order nonlinear uncertain systems. Sci. China 2017, 60, 022201. [Google Scholar] [CrossRef] [Green Version]
- Ma, D.; Chen, J. Delay Margin of low-order systems achievable by PID controllers. Automatica 2019, 64, 1958–1973. [Google Scholar] [CrossRef]
- Hussain, I.; Das, D.C.; Latif, A.; Sinha, N.; Hussain, S.M.S.; Ustun, T.S. Active power control of autonomous hybrid power system using two degree of freedom PID controller. Energy Rep. 2022, 8, 973–981. [Google Scholar] [CrossRef]
- Fan, Y.S.; Xu, Z.G.; Chen, L.J. Research on adaptive fuzzy control system of boiler superheated steam temperature based on dynamic characteristic mechanism analysis. Proc. CSEE 1997, 17, 23–28. [Google Scholar] [CrossRef]
- Liu, L.Y.; Jin, Q.B. Analytical optimization of IMC-PID design based on performance/robustness tradeoff tuning strategy for the modified Smith structure. J. Low Freq. Noise Vib. Act. Control 2020, 39, 158–173. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load/% | ||
|---|---|---|
| 100 | ||
| 75 | ||
| 50 |
| Controller | Figure 5 (× 103) | Figure 6 (×103) | Figure 7 (×103) | Figure 8 (×103) | Figure 9 (×103) | Figure 10 (×103) |
|---|---|---|---|---|---|---|
| PID | 1.1852 | 1.1563 | 2.2372 | 5.7468 | 4.2103 | 5.6937 |
| ADRC | 1.4041 | 1.2728 | 1.7880 | 3.7776 | 6.1339 | 7.1943 |
| Proposed PID | 0.90099 | 1.1562 | 1.7966 | 3.3028 | 4.1970 | 5.6822 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, X.; Xu, P.; Song, G.; Gu, H.; Gu, H.; Wang, L.; Zhu, H. PID Control of a Superheated Steam Temperature System Based on Integral Gain Scheduling. Energies 2022, 15, 8978. https://doi.org/10.3390/en15238978
Cui X, Xu P, Song G, Gu H, Gu H, Wang L, Zhu H. PID Control of a Superheated Steam Temperature System Based on Integral Gain Scheduling. Energies. 2022; 15(23):8978. https://doi.org/10.3390/en15238978
Chicago/Turabian StyleCui, Xiaobo, Pan Xu, Guohui Song, Haiming Gu, Hui Gu, Liang Wang, and Hongxia Zhu. 2022. "PID Control of a Superheated Steam Temperature System Based on Integral Gain Scheduling" Energies 15, no. 23: 8978. https://doi.org/10.3390/en15238978
APA StyleCui, X., Xu, P., Song, G., Gu, H., Gu, H., Wang, L., & Zhu, H. (2022). PID Control of a Superheated Steam Temperature System Based on Integral Gain Scheduling. Energies, 15(23), 8978. https://doi.org/10.3390/en15238978