
Analysis on Position Estimation Error of Sensorless Control Based on Square-Wave Injection for SynRM Caused by Dead-Time Harmonic Current

Abstract
:1. Introduction
2. Sensorless Control Based on Filter-Free Square-Wave Voltage Injection
2.1. The High-Frequency Equivalent Model of SynRM
2.2. Sensorless Control Based on Filter-Free Square Voltage Injection
3. Analysis of Error Caused by Dead-Time Effect Harmonic Current
4. Current Polarity Detection and Dead-Time Effect Compensation for Filter-Free Square-Wave Injection
4.1. Voltage Compensation Methods for Inverter
4.2. Filter-Free Current Polarity Detection
5. Experiment Results and Analysis
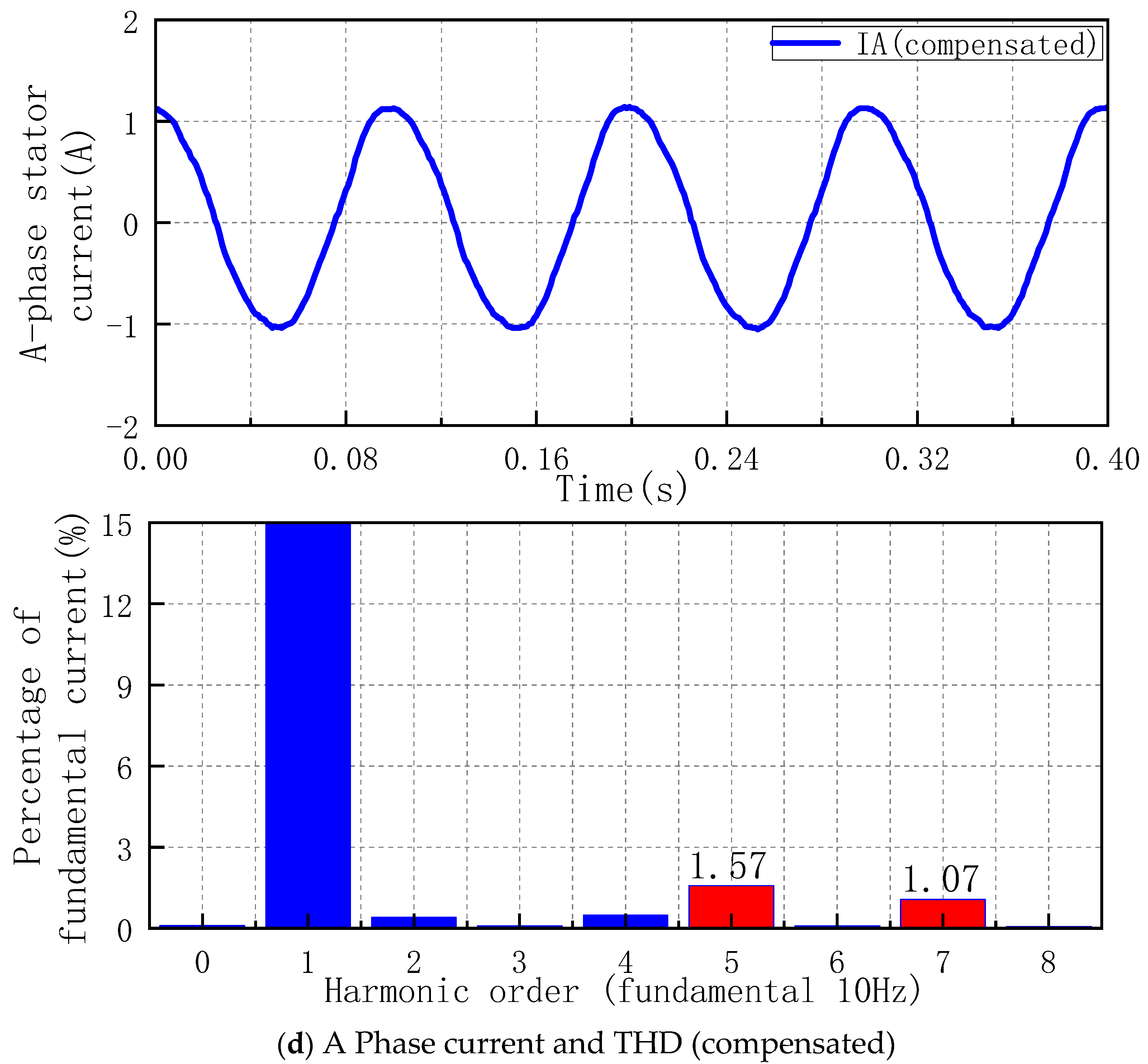
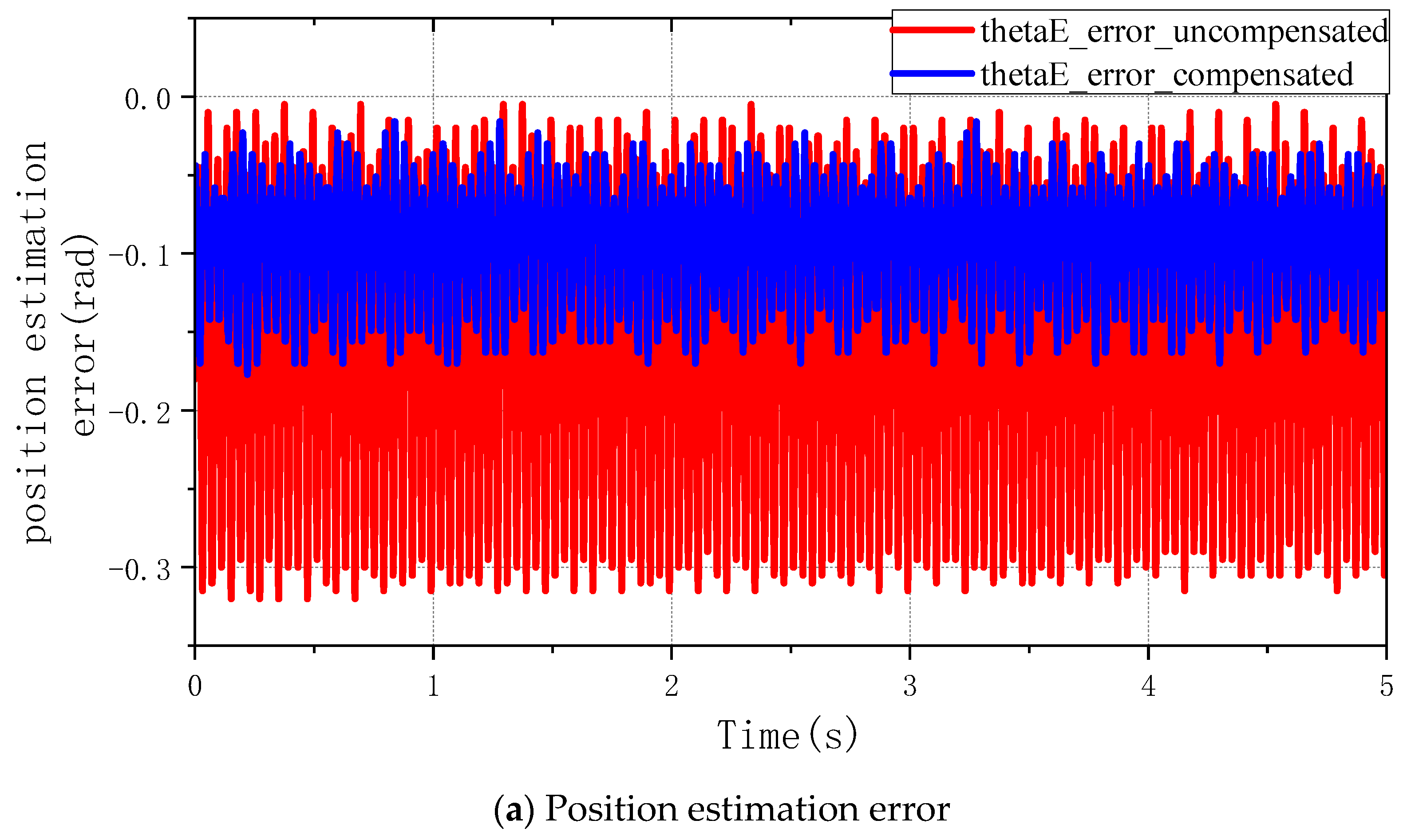
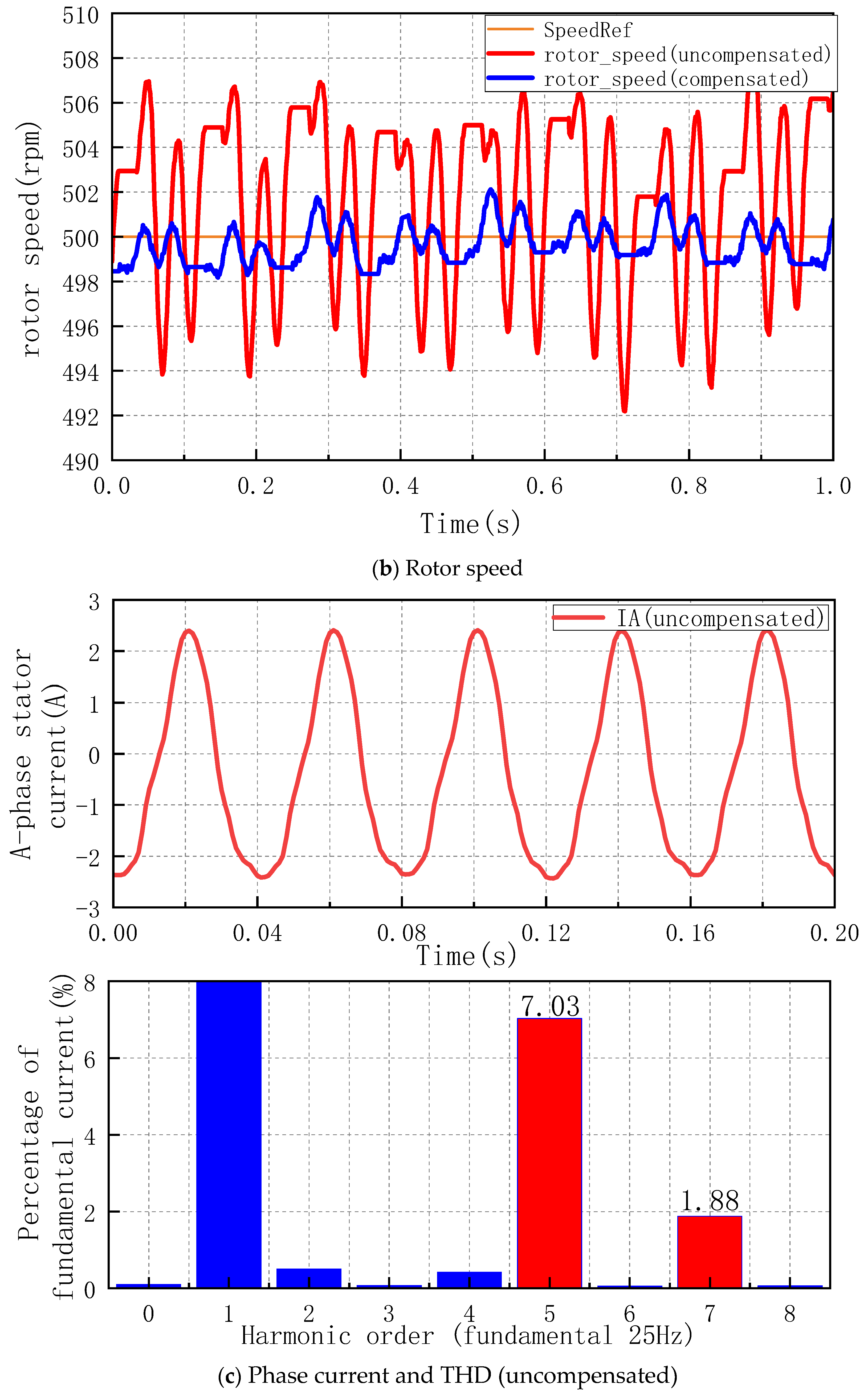
5.1. Uncompensated/Compensated Experiment and Result Analysis
5.2. Comparision and Analysis of Experimentation Data for Different Speed Conditions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tsujii, Y.; Morimoto, S.; Inoue, Y.; Sanada, M. Effect of Inductance Model on Sensorless Control Performance of SynRM with Magnetic Saturation. In Proceedings of the 2022 International Power Electronics Conference (IPEC-Himeji 2022-ECCE Asia), Himeji, Japan, 15–19 May 2022; pp. 2687–2693. [Google Scholar] [CrossRef]
- Li, C.; Wang, G.; Zhang, G.; Xu, D. High Frequency Torque Ripple Suppression for High Frequency Signal Injection Based Sensorless Control of SynRMs. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 2544–2548. [Google Scholar] [CrossRef]
- Li, C.; Wang, G.; Zhang, G.; Zhao, N.; Xu, D.G. Adaptive Pseudorandom High-Frequency Square-Wave Voltage Injection Based Sensorless Control for SynRM Drives. IEEE Trans. Power Electron. 2020, 36, 3200–3210. [Google Scholar] [CrossRef]
- Alberti, L.; Bottesi, O.; Calligaro, S.; Kumar, P.; Petrella, R. Self-adaptive high-frequency injection based sensorless control for IPMSM and SynRM. In Proceedings of the 2017 IEEE International Symposium on Sensorless Control for Electrical Drives (SLED), Catania, Italy, 18–19 September 2017; pp. 97–102. [Google Scholar] [CrossRef]
- Nikowitz, M.; Schrodl, M. Stability- and Sensitivity-Analysis of a Sensorless Controlled Synchronous Reluctance Machine using the Back-EMF Model. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; pp. 234–239. [Google Scholar] [CrossRef]
- Scalcon, F.P.; Volpato, C.J.; Lazzari, T.; Gabbi, T.S.; Vieira, R.P.; Grundling, H.A. Sensorless Control of a SynRM Drive Based on a Luenberger Observer with an Extended EMF Model. In Proceedings of the IECON 2019 - 45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 1333–1338. [Google Scholar] [CrossRef]
- Martinez, M.; Laborda, D.F.; Reigosa, D.; Fernandez, D.; Guerrero, J.M.; Briz, F. SynRM Sensorless Torque Estimation Using High-Frequency Signal Injection. IEEE Trans. Ind. Appl. 2021, 57, 6083–6092. [Google Scholar] [CrossRef]
- Setty, A.R.; Wekhande, S.; Chatterjee, K. Adaptive signal amplitude for high frequency signal injection based sensor less PMSM drives. In Proceedings of the 2013 IEEE International Symposium on Sensorless Control for Electrical Drives and Predictive Control of Electrical Drives and Power Electronics (SLED/PRECEDE), Munich, Germany, 17–19 October 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Liang, B.; Wang, Y.; Wei, J. A Compensation Method for Rotor Position Estimation of PMSM Based on Pulsating High Frequency Injection. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; pp. 2128–2132. [Google Scholar] [CrossRef]
- Yoon, Y.-D.; Sul, S.-K. Sensorless control for induction machines using square-wave voltage injection. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 3147–3152. [Google Scholar] [CrossRef]
- Li, W.; Liu, J. Improved High-Frequency Square-Wave Voltage Signal Injection Sensorless Strategy for Interior Permanent Magnet Synchronous Motors. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 3205–3209. [Google Scholar] [CrossRef]
- Wu, X.; Feng, Y.; Liu, X.; Huang, S.; Yuan, X.; Gao, J.; Zheng, J. Initial Rotor Position Detection for Sensorless Interior PMSM With Square-Wave Voltage Injection. IEEE Trans. Magn. 2017, 53, 8112104. [Google Scholar] [CrossRef]
- Zhou, J.; Liu, J. An Improved High Frequency Square Wave Injection Permanent Magnet Synchronous Motor sensorless Control. In Proceedings of the 2021 6th International Conference on Control and Robotics Engineering (ICCRE), Beijing, China, 16–18 April 2021; pp. 101–105. [Google Scholar] [CrossRef]
- Shi, W.-W.; Du, J.-W.; Jia-Wei, D. Sensorless control of Permanent Magnet Synchronous Motor based on rotating coordinate system considering dead-time. In Proceedings of the 2016 IEEE International Conference on Power and Renewable Energy (ICPRE), Shanghai, China, 21–23 October 2016; pp. 57–61. [Google Scholar] [CrossRef]
- Hwang, C.-E.; Lee, Y.; Sul, S.-K. Analysis on the position estimation error in position-sensorless operation using pulsating square wave signal injection. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 844–850. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Li, Y.; Howe, D.; Bingham, C.M. Compensation for Rotor Position Estimation Error due to Cross-Coupling Magnetic Saturation in Signal Injection Based Sensorless Control of PM Brushless AC Motors. In Proceedings of the 2007 IEEE International Electric Machines & Drives Conference, Antalya, Turkey, 3–5 May 2007; pp. 208–213. [Google Scholar] [CrossRef] [Green Version]
- Hwang, C.-E.; Lee, Y.; Sul, S.-K. Analysis on Position Estimation Error in Position-Sensorless Operation of IPMSM Using Pulsating Square Wave Signal Injection. IEEE Trans. Ind. Appl. 2018, 55, 458–470. [Google Scholar] [CrossRef]
- Yanying, W.; Peng, W.; Zhen, W. Sensorless Control of Permanent Magnet Synchronous Motor with Double Frequency Square Wave Voltage Injection. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Kim, D.; Kwon, Y.-C.; Sul, S.-K.; Kim, J.-H.; Yu, R.-S. Suppression of Injection Voltage Disturbance for High-Frequency Square-Wave Injection Sensorless Drive with Regulation of Induced High-Frequency Current Ripple. IEEE Trans. Ind. Appl. 2015, 52, 302–312. [Google Scholar] [CrossRef]
- Kim, K.-C.; Ahn, J.S.; Won, S.H.; Hong, J.-P.; Lee, J. A Study on the Optimal Design of SynRM for the High Torque and Power Factor. IEEE Trans. Magn. 2007, 43, 2543–2545. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, G.; Xu, D. Initial position detection method of permanent magnet synchronous motor based on unfiltered square wave signal injection. J. Electrotech. 2017, 32, 7. (In Chinese) [Google Scholar] [CrossRef]
- Swathy, T.V.; Abhilash, T.V. High performance vector control of PMSM with dead-time compensation. In Proceedings of the 2012 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Bengaluru, India, 16–19 December 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Xu, Z.; Yang, K.; Zheng, Y.; Yang, F.; Zhang, Y.; Song, P. Torque-Ripple reduction in Permanent Magnet Synchronous Motor Based on LADRC and Repetitive control. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October–3 November 2021; pp. 1777–1781. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
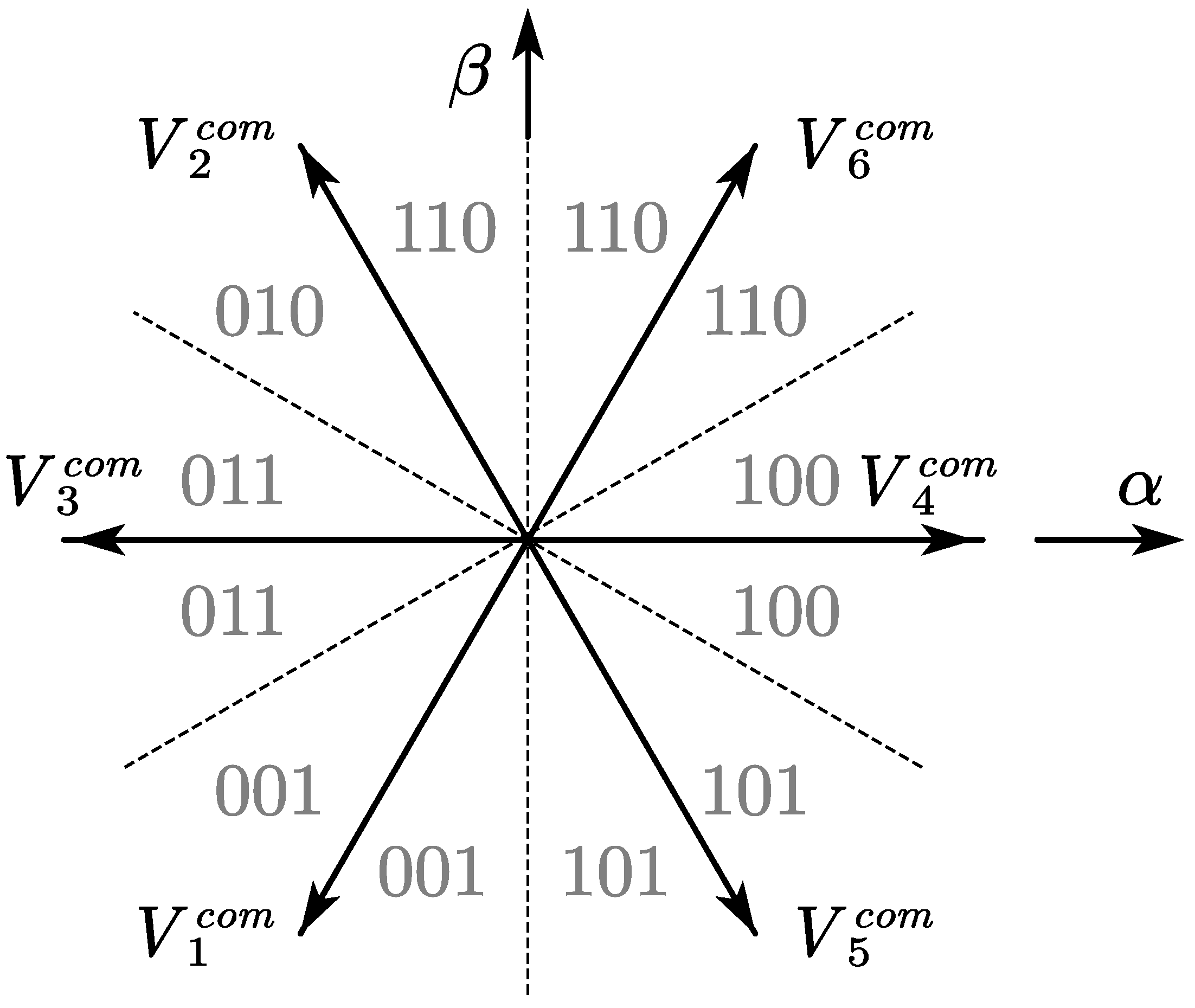
| The Range of θ | Stator Current Polarities (ia, ib, ic) |
|---|---|
| −π~−5π/6 | 011 |
| −5π/6~−π/2 | 001 |
| −π/2~−π/6 | 101 |
| −π/6~π/6 | 100 |
| π/6~π/2 | 110 |
| π/2~5π/6 | 010 |
| 5π/6~π | 011 |
| The Parameters | The Value of the Parameters |
|---|---|
| Number of pole pairs | 3 |
| Stator resistance (Ω) | 3.11 |
| d-axis inductance (mH) | 52.61 |
| q-axis inductance (mH) | 152.76 |
| Permanent magnet flux linkage (Wb) | 0.3064 |
| Rotor inertia (kg·m2) | 0.0042 |
| Viscous damping (N·m·s) | 0.002 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Yang, K.; Luo, C. Analysis on Position Estimation Error of Sensorless Control Based on Square-Wave Injection for SynRM Caused by Dead-Time Harmonic Current. Energies 2022, 15, 9539. https://doi.org/10.3390/en15249539
Huang Y, Yang K, Luo C. Analysis on Position Estimation Error of Sensorless Control Based on Square-Wave Injection for SynRM Caused by Dead-Time Harmonic Current. Energies. 2022; 15(24):9539. https://doi.org/10.3390/en15249539
Chicago/Turabian StyleHuang, Yuhao, Kai Yang, and Cheng Luo. 2022. "Analysis on Position Estimation Error of Sensorless Control Based on Square-Wave Injection for SynRM Caused by Dead-Time Harmonic Current" Energies 15, no. 24: 9539. https://doi.org/10.3390/en15249539