
Integral Methodology for the Multiphysics Design of an Automotive Eddy Current Damper



Abstract
:1. Introduction
2. The Multiphysics Model of the EC Damper
2.1. The Geometry of the EC Damper
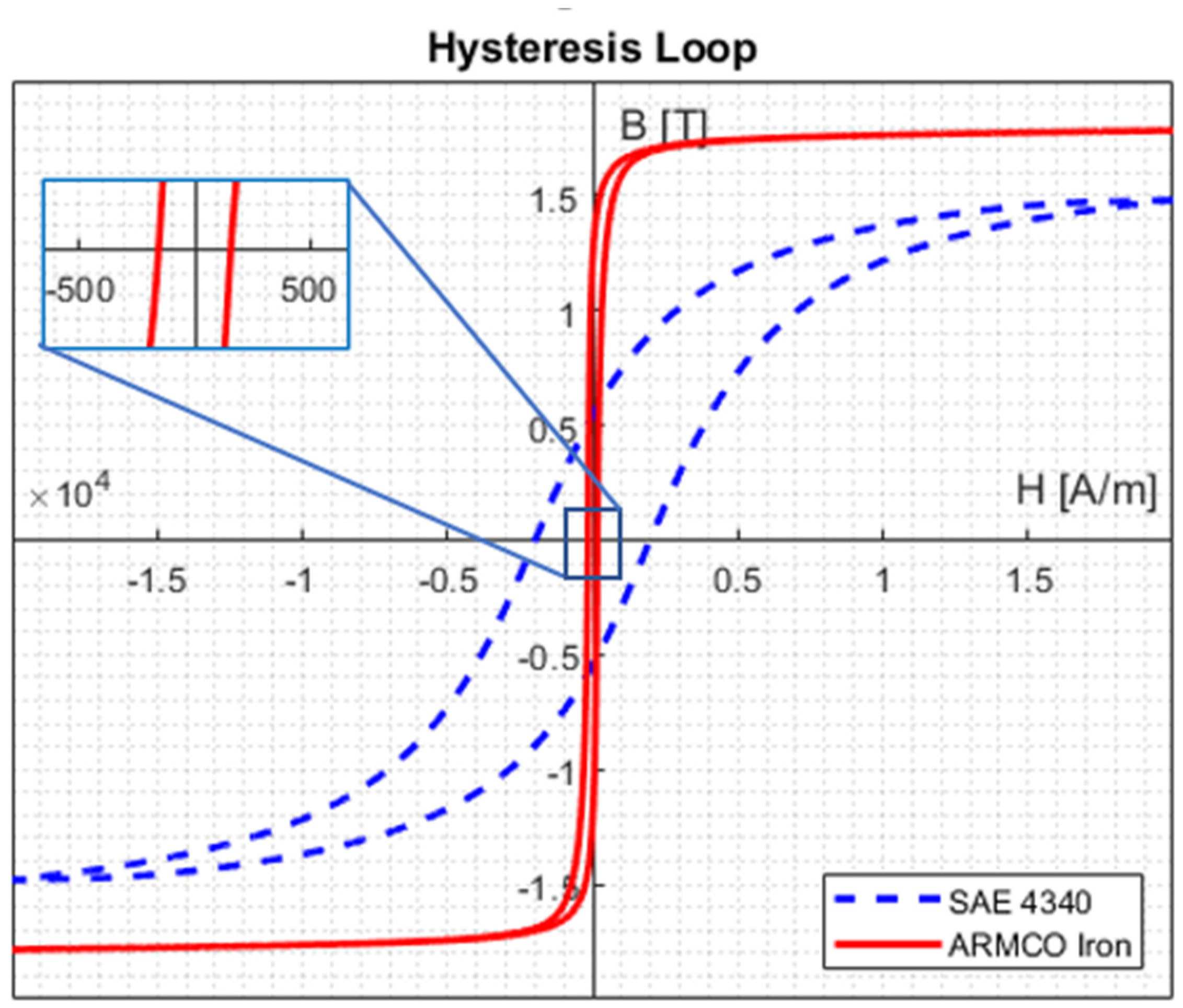
2.2. The Magnetic Model
2.3. The Thermal Field Model
- Air–gas fluid
- constant temperature at both ends of the stator tube
- convective heat flux at the outer surface of the external stator tube
- no-slip condition at all the boundaries.
- compressible and laminar flow
2.4. Implementation of the EC Damper Multiphyscis Model
2.4.1. Implementation of the Magnetic Model
2.4.2. Implementation of the Thermal Flow Models
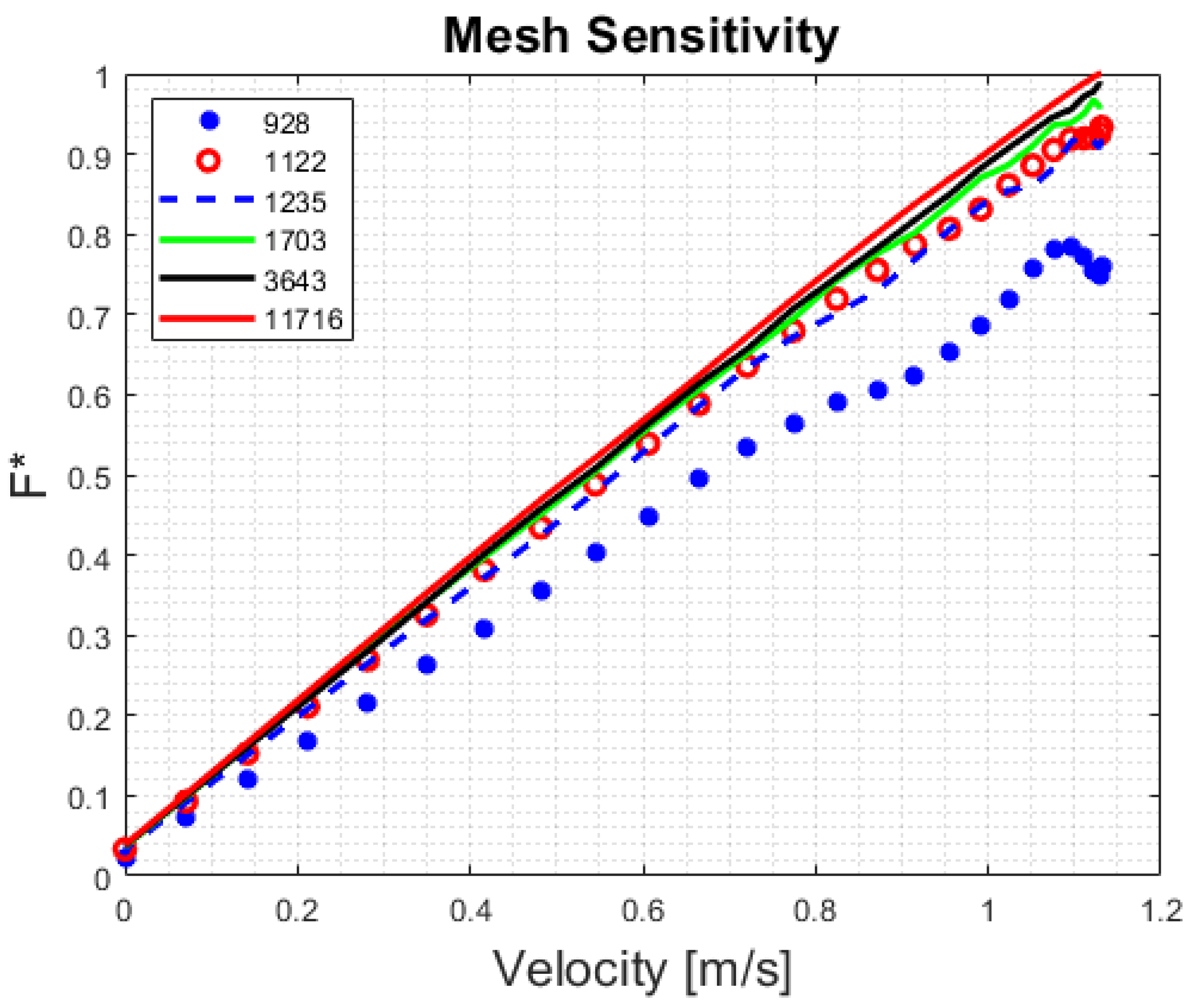
2.5. Mesh Sensitivity Study
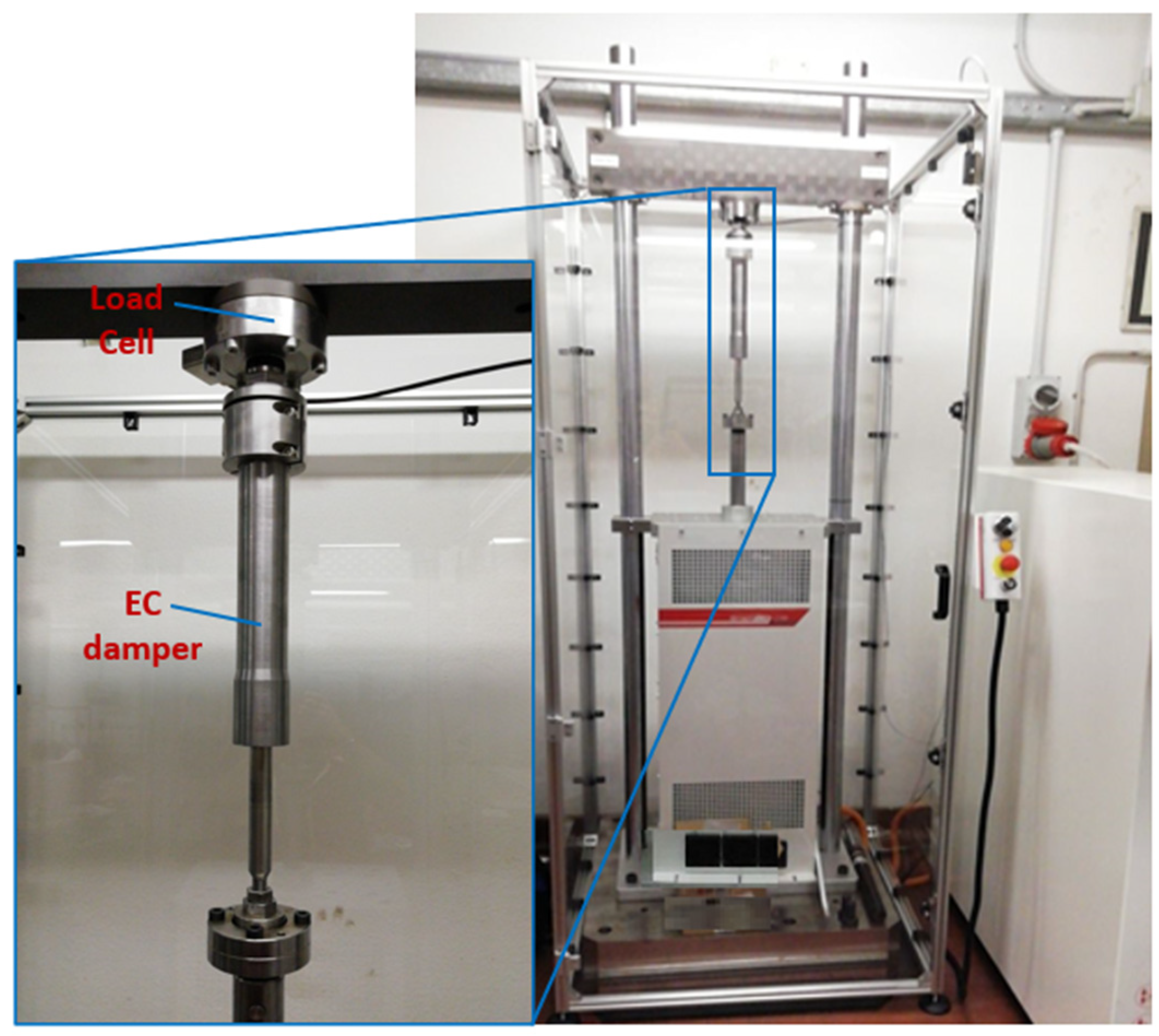
3. Experimental Validation of the EC Damper Model
4. EC Damper Simulation and Experimental Results
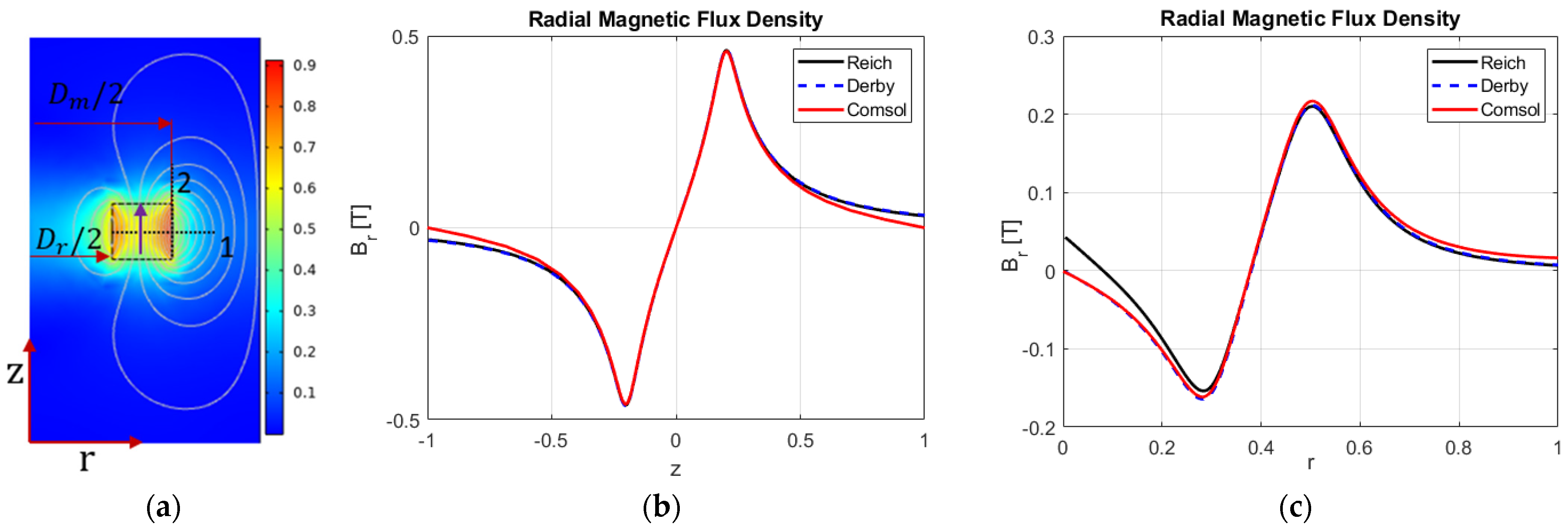
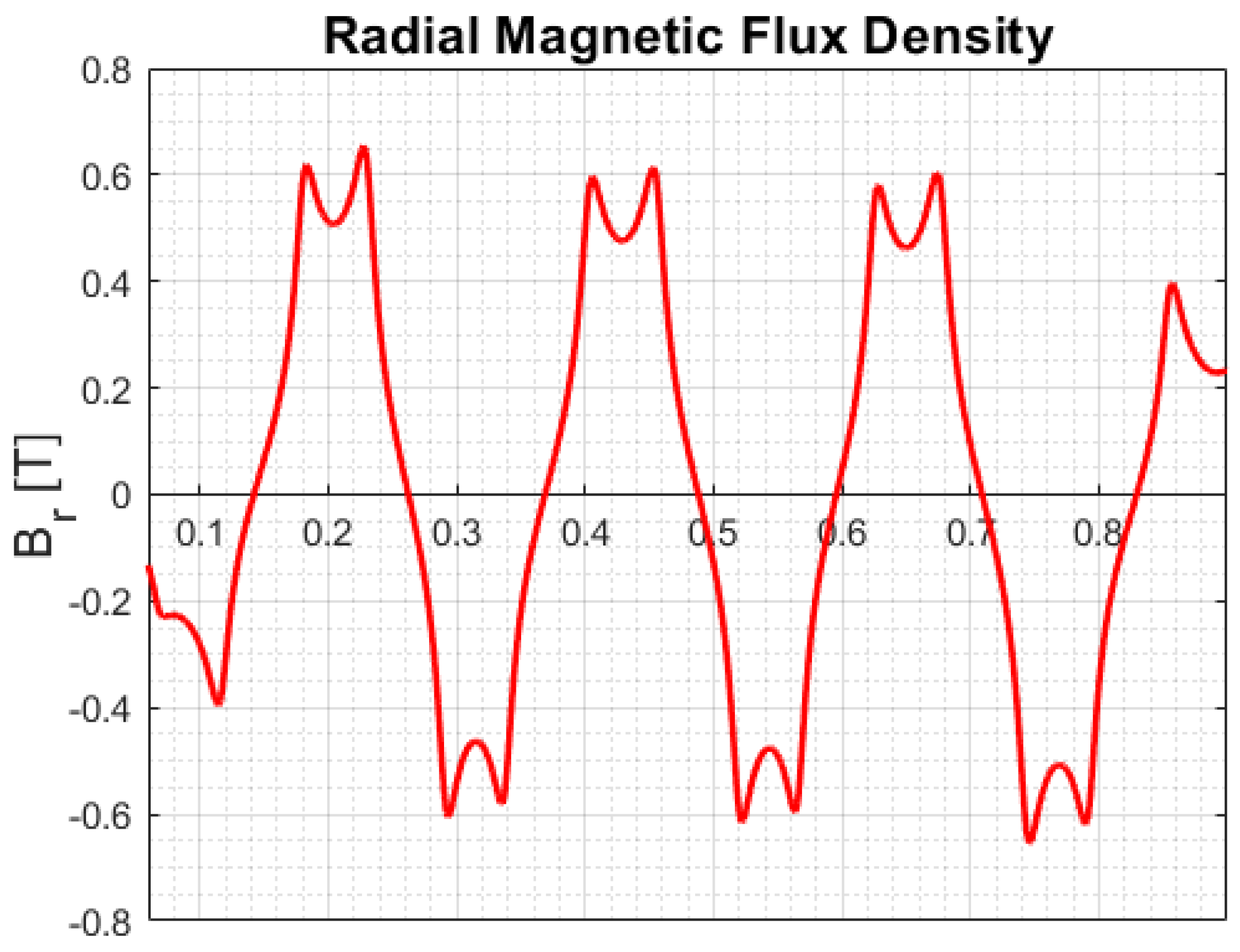
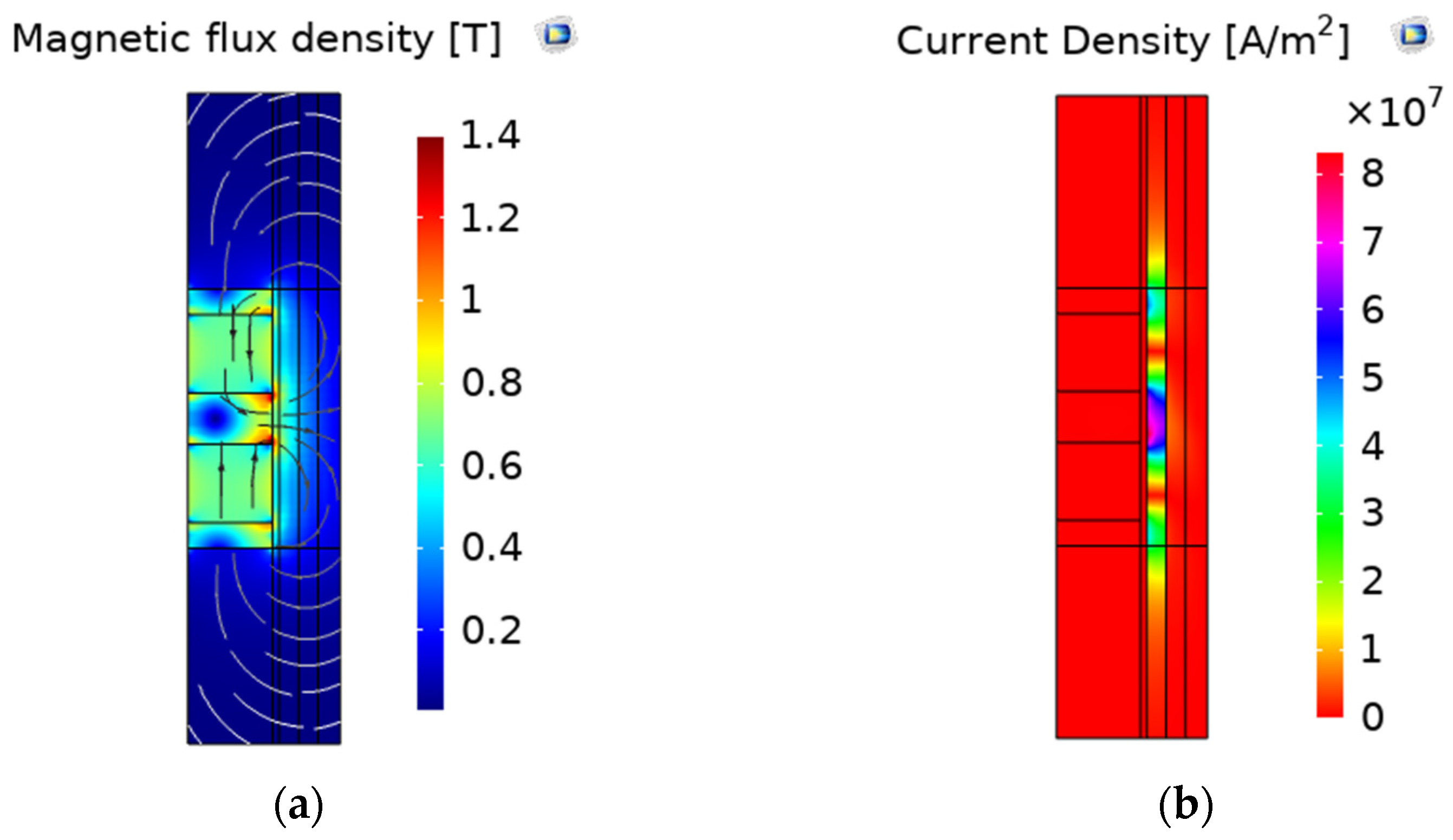
4.1. The Magnetic Field
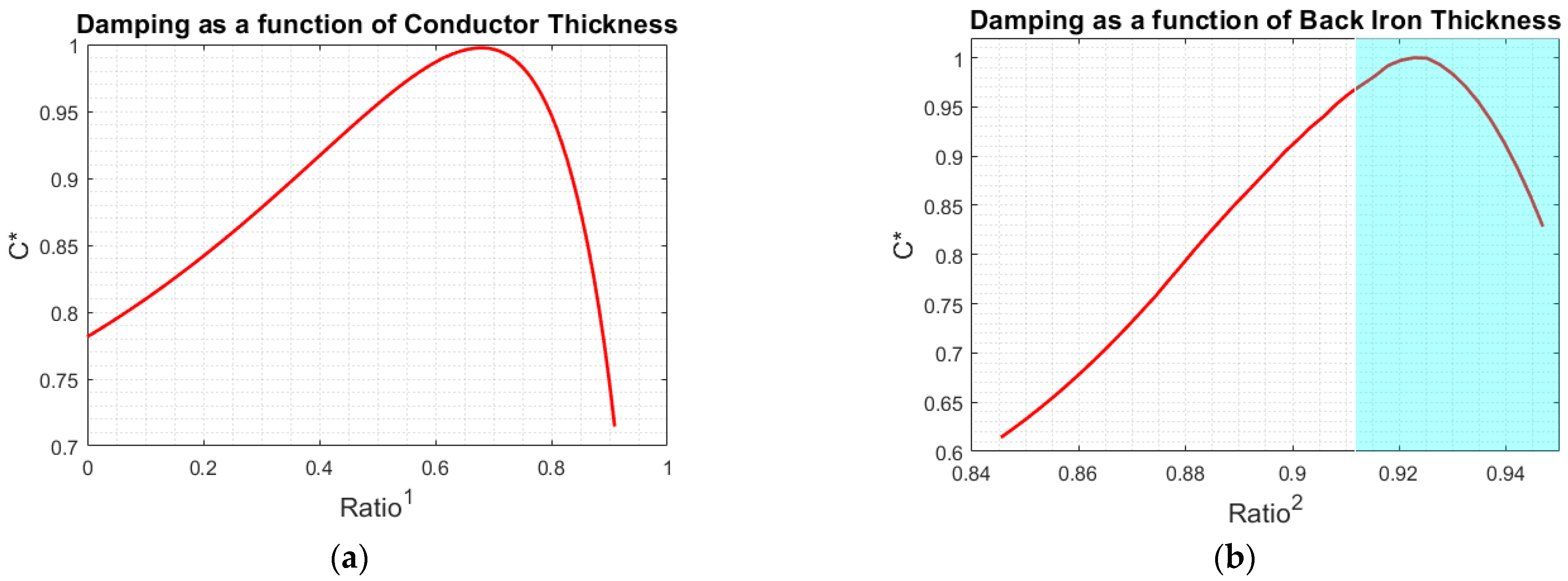
4.2. The Effect of Back Iron
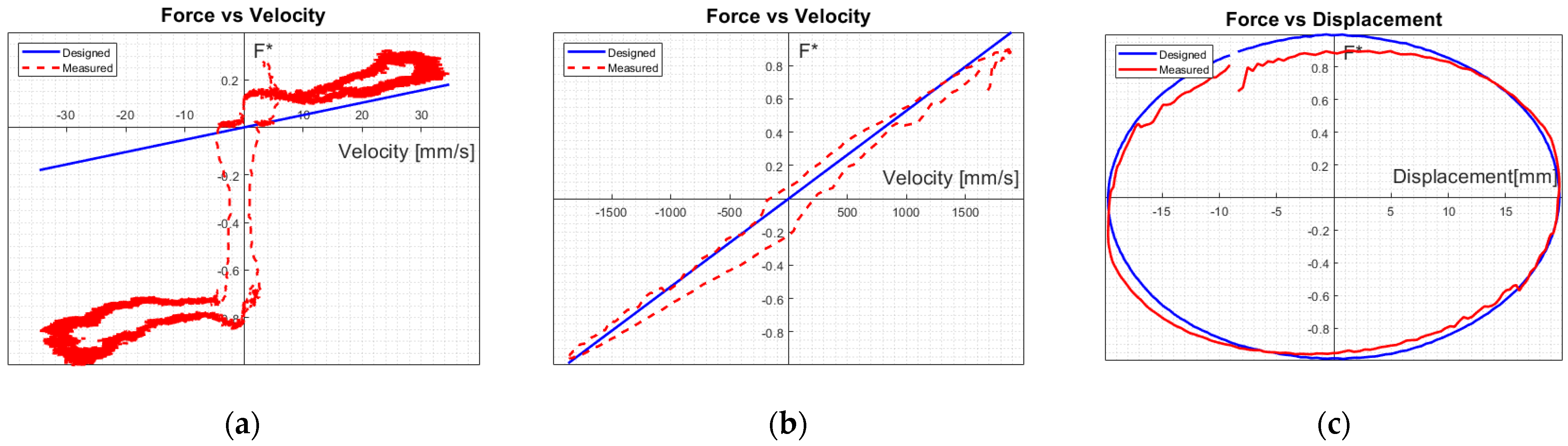
4.3. Performance of the EC Damper and Experimental Verification
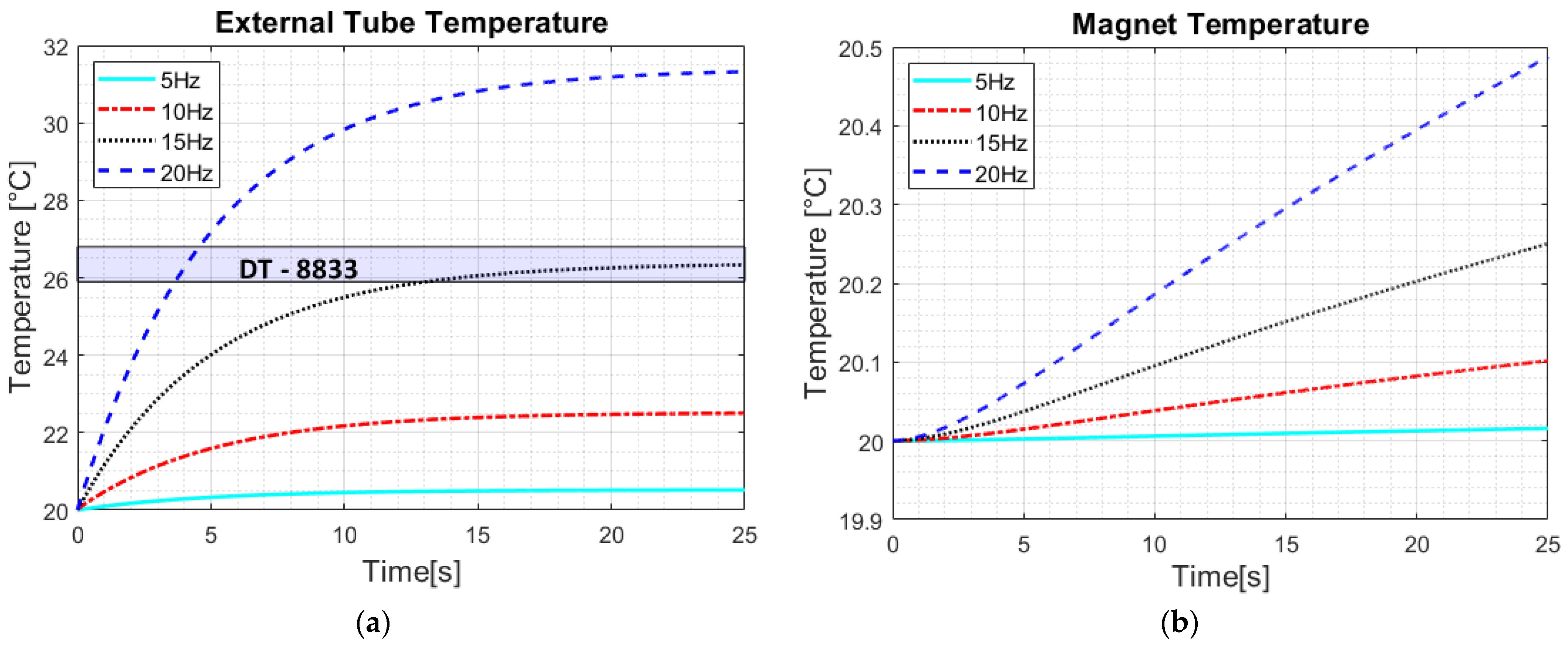
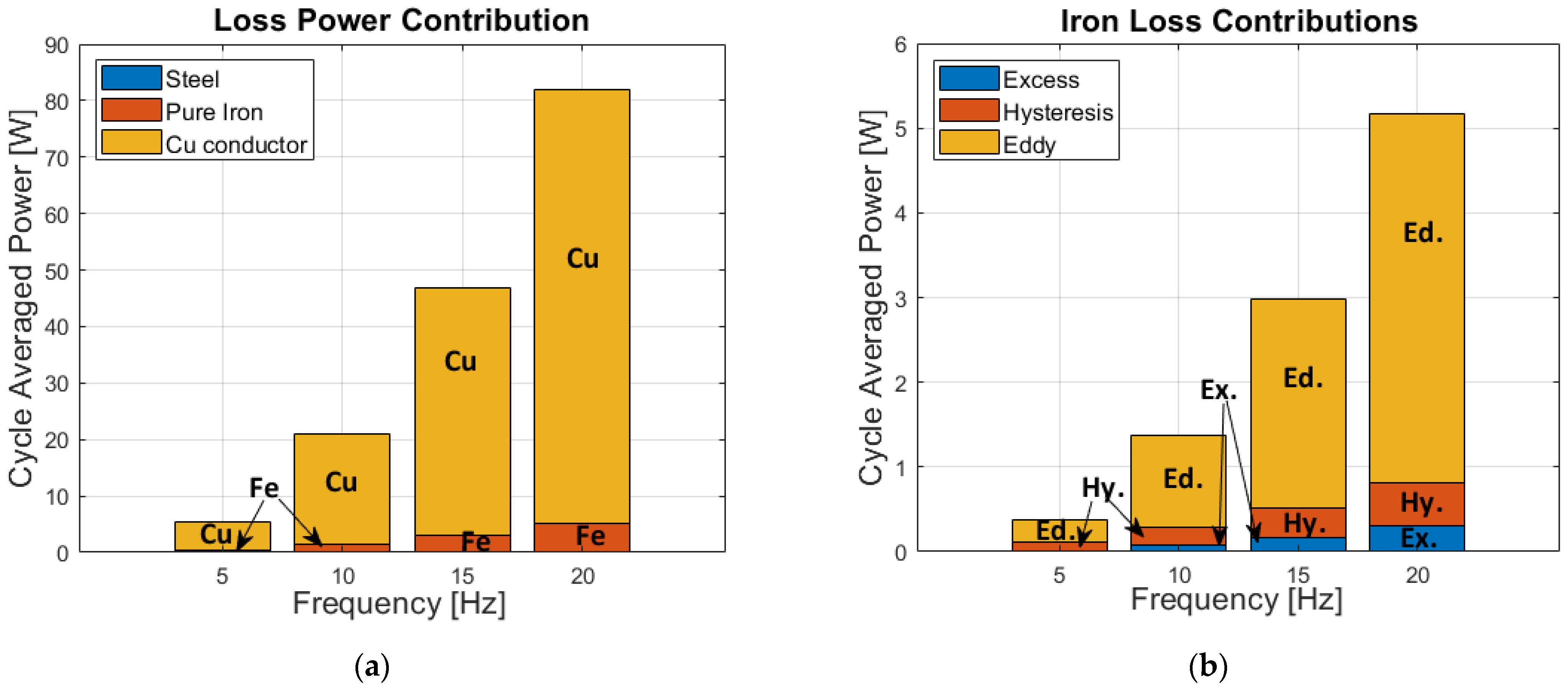
4.4. Thermal Characteristics
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Ebrahimi, B.; Khamesee, M.B.; Golnaraghi, F. Eddy current damper feasibility in automobile suspension: Modeling, simulation and testing. Smart Mater. Struct. 2008, 18, 015017. [Google Scholar] [CrossRef]
- Ebrahimi, B.; Khamesee, M.B.; Golnaraghi, F. A novel eddy current damper: Theory and experiment. J. Phys. D Appl. Phys. 2009, 42, 075001. [Google Scholar] [CrossRef]
- Abdo, T.M.; Huzayyin, A.A.; Abdallah, A.A.; Adly, A.A. Characteristics and Analysis of an Eddy Current Shock Absorber Damper Using Finite Element Analysis. Actuators 2019, 8, 77. [Google Scholar] [CrossRef] [Green Version]
- Maddah, A.A.; Hojjat, Y.; Karafi, M.R.; Ashory, M.R. Reduction of magneto rheological dampers stiffness by incorporating of an eddy current damper. J. Sound Vib. 2017, 396, 51–68. [Google Scholar] [CrossRef]
- Pu, H.; Li, J.; Wang, M.; Huang, Y.; Zhao, J.; Yuan, S.; Peng, Y.; Xie, S.; Luo, J.; Sun, Y. Optimum design of an eddy current damper considering the magnetic congregation effect. J. Phys. D Appl. Phys. 2019, 53, 115002. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, Z.; Hua, X.; Huang, Z.; Niu, H. Design and dynamic characterization of a large-scale eddy current damper with enhanced performance for vibration control. Mech. Syst. Signal Process. 2020, 145, 106879. [Google Scholar] [CrossRef]
- Firoozy, P.; Friswell, M.I.; Gao, Q. Using time delay in the nonlinear oscillations of magnetic levitation for simultaneous energy harvesting and vibration suppression. Int. J. Mech. Sci. 2019, 163, 105098. [Google Scholar] [CrossRef]
- Kamaruzaman, N.A.; Robertson, W.S.; Ghayesh, M.H.; Cazzolato, B.S.; Zander, A.C. Six degree of freedom quasi-zero stiffness magnetic spring with active control: Theoretical analysis of passive versus active stability for vibration isolation. J. Sound Vib. 2021, 502, 116086. [Google Scholar] [CrossRef]
- Gulec, M.; Aydin, M.; Nerg, J.; Lindh, P.; Pyrhonen, J.J. Magneto-Thermal Analysis of an Axial-Flux Permanent-Magnet-Assisted Eddy-Current Brake at High-Temperature Working Conditions. IEEE Trans. Ind. Electron. 2020, 68, 5112–5121. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, Y.; Ye, L. Braking Torque Analysis and Control Method of a New Motor with Eddy-Current Braking and Heating System for Electric Vehicle. Int. J. Automot. Technol. 2021, 22, 1159–1168. [Google Scholar] [CrossRef]
- Diez-Jimenez, E.; Cordero, C.A.; Alcover-Sánchez, R.; Corral-Abad, E. Modelling and Test of an Integrated Magnetic Spring-Eddy Current Damper for Space Applications. Actuators 2021, 10, 8. [Google Scholar] [CrossRef]
- Ao, W.K.; Reynolds, P. Analytical and experimental study of eddy current damper for vibration suppression in a footbridge structure. In Dynamics of Civil Structures; Springer: Cham, Switzerland, 2017; Volume 2, pp. 131–138. [Google Scholar]
- Irazu, L.; Elejabarrieta, M.J. Analysis and numerical modelling of eddy current damper for vibration problems. J. Sound Vib. 2018, 426, 75–89. [Google Scholar] [CrossRef]
- Gysen, B.L.; van der Sande, T.P.; Paulides, J.J.; Lomonova, E.A. Efficiency of a regenerative direct-drive electromagnetic active suspension. IEEE Trans. Veh. Technol. 2011, 60, 1384–1393. [Google Scholar] [CrossRef] [Green Version]
- Callaghan, E.E.; Maslen, S.H. The Magnetic Field of a Finite Solenoid; National Aeronautics and Space Administration: Washington, DC, USA, 1960.
- Derby, N.; Olbert, S. Cylindrical magnets and ideal solenoids. Am. J. Phys. 2010, 78, 229–235. [Google Scholar] [CrossRef] [Green Version]
- Reich, F.A.; Stahn, O.; Müller, W.H. The magnetic field of a permanent hollow cylindrical magnet. Contin. Mech. Thermodyn. 2015, 28, 1435–1444. [Google Scholar] [CrossRef]
- MacLatchy, C.S.; Backman, P.; Bogan, L. A quantitative magnetic braking experiment. Am. J. Phys. 1993, 61, 1096–1101. [Google Scholar] [CrossRef]
- Bae, J.-S.; Hwang, J.-H.; Park, J.-S.; Kwag, D.-G. Modeling and experiments on eddy current damping caused by a permanent magnet in a conductive tube. J. Mech. Sci. Technol. 2009, 23, 3024–3035. [Google Scholar] [CrossRef]
- Friedrich, L.A.J.; Paulides, J.J.H.; Lomonova, E.A. Modeling and Optimization of a Tubular Generator for Vibration Energy Harvesting Application. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- O’handley, R.C. Modern Magnetic Materials: Principles and Applications; Wiley: New York, NY, USA, 2000. [Google Scholar]
- Shokrollahi, H. The magnetic and structural properties of the most important alloys of iron produced by mechanical alloying. Mater. Des. 2009, 30, 3374–3387. [Google Scholar] [CrossRef]
- Du, S.W.; Ramanujan, R.V. Mechanical alloying of Fe–Ni based nanostructured magnetic materials. J. Magn. Magn. Mater. 2005, 292, 286–298. [Google Scholar] [CrossRef]
- Naumoski, H.; Maucher, A.; Herr, U. Investigation of the influence of global stresses and strains on the magnetic properties of electrical steels with varying alloying content and grain size. In Proceedings of the 2015 5th International Electric Drives Production Conference (EDPC), Nuremberg, Germany, 15–16 September 2015; pp. 1–8. [Google Scholar]
- Bertotti, G.; Fiorillo, F.; Soardo, G.P. The prediction of power losses in soft magnetic materials. J. Phys. Colloq. 1988, 49, C8-1915. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Xue, S.; Chu, W.; Feng, J.; Guo, S.; Chen, Z.; Peng, J. Evaluation of iron loss models in electrical machines. IEEE Trans. Ind. Appl. 2018, 55, 1461–1472. [Google Scholar] [CrossRef]
- Boglietti, A.; Cavagnino, A.; Lazzari, M.; Pastorelli, M. Predicting iron losses in soft magnetic materials with arbitrary voltage supply: An engineering approach. IEEE Trans. Magn. 2003, 39, 981–989. [Google Scholar] [CrossRef]
- Kowal, D.; Sergeant, P.; Dupre, L.; Vandenbossche, L. Comparison of Iron Loss Models for Electrical Machines with Different Frequency Domain and Time Domain Methods for Excess Loss Prediction. IEEE Trans. Magn. 2014, 51, 1–10. [Google Scholar] [CrossRef]
- Bottauscio, O.; Canova, A.; Chiampi, M.; Repetto, M. Iron losses in electrical machines: Influence of different material models. IEEE Trans. Magn. 2002, 38, 805–808. [Google Scholar] [CrossRef]
- Jiles, D.C.; Atherton, D.L. Theory of ferromagnetic hysteresis. J. Appl. Phys. 1984, 55, 2115–2120. [Google Scholar] [CrossRef]
- Leite, J.V.; Benabou, A.; Sadowski, N. Accurate minor loops calculation with a modified Jiles-Atherton hysteresis model. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2009, 28, 741–749. [Google Scholar] [CrossRef] [Green Version]
- Szewczyk, R. Computational problems connected with Jiles-Atherton model of magnetic hysteresis. In Recent Advances in Automation, Robotics and Measuring Techniques; Springer: Cham, Switzerland, 2014; pp. 275–283. [Google Scholar]
- Podbereznaya, I.B.; Medvedev, V.V.; Pavlenko, A.V.; Bol’shenko, I.A. Selection of optimal parameters for the Jiles–Atherton magnetic hysteresis model. Russ. Electr. Eng. 2019, 90, 80–85. [Google Scholar] [CrossRef]
- Sedira, D.; Gabi, Y.; Kedous-Lebouc, A.; Jacob, K.; Wolter, B.; Strass, B. ABC method for hysteresis model parameters identification. J. Magn. Magn. Mater. 2020, 505, 166724. [Google Scholar] [CrossRef]
- Zou, M. Parameter estimation of extended Jiles–Atherton hysteresis model based on ISFLA. IET Electr. Power Appl. 2019, 14, 212–219. [Google Scholar] [CrossRef]
- Hergli, K.; Marouani, H.; Zidi, M. Numerical determination of Jiles-Atherton hysteresis parameters: Magnetic behavior under mechanical deformation. Phys. B Condens. Matter 2018, 549, 74–81. [Google Scholar] [CrossRef]
- Szewczyk, R.; Salach, J.; Bienkowski, A.; Frydrych, P.; Kolano-Burian, A. Application of Extended Jiles–Atherton Model for Modeling the Magnetic Characteristics of Fe41.5Co41.5Nb3Cu1B13 Alloy in As-Quenched and Nanocrystalline State. IEEE Trans. Magn. 2012, 48, 1389–1392. [Google Scholar] [CrossRef]
- Hussain, S.; Benabou, A.; Clenet, S.; Lowther, D.A. Temperature Dependence in the Jiles–Atherton Model for Non-Oriented Electrical Steels: An Engineering Approach. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Belgasmi, I.; Hamimid, M. Accurate Hysteresis Loops Calculation Under the Frequency Effect Using the Inverse Jiles-Atherton Model. Adv. Electromagn. 2020, 9, 93–98. [Google Scholar] [CrossRef]
- Reimpell, J.; Stoll, H.; Betzler, J. The Automotive Chassis: Engineering Principles; Elsevier Butterworth-Heinemann: Oxford, UK, 2001. [Google Scholar]
- Jiles, D.C.; Thoelke, J.B.; Devine, M.K. Numerical determination of hysteresis parameters for the modeling of magnetic properties using the theory of ferromagnetic hysteresis. IEEE Trans. Magn. 1992, 28, 27–35. [Google Scholar] [CrossRef]
- Sablik, M.J.; Kwun, H.; Burkhardt, G.L.; Jiles, D.C. Model for the effect of tensile and compressive stress on ferromagnetic hysteresis. J. Appl. Phys. 1987, 61, 3799–3801. [Google Scholar] [CrossRef]
- Bergman, T.L.; Lavine, A.S.; Incropera, F.P.; DeWitt, D.P. Fundamentals of Heat and Mass Transfer, 7th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Available online: https://www.comsol.com/model/download/735431/models.acdc.vector_hysteresis_modeling.pdf (accessed on 1 November 2021).
- Ebrahimi, B.; Khamesee, M.B.; Golnaraghi, F. Permanent magnet configuration in design of an eddy current damper. Microsyst. Technol. 2010, 16, 19. [Google Scholar] [CrossRef]
- Gieras, J.F.; Piech, Z.J.; Tomczuk, B. Linear Synchronous Motors: Transportation and Automation Systems, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Bas, J.A.; Calero, J.A.; Dougan, M.J. Sintered soft magnetic materials. Properties and applications. J. Magn. Magn. Mater. 2003, 254, 391–398. [Google Scholar] [CrossRef]
- Chermahini, M.D.; Zandrahimi, M.; Shokrollahi, H.; Sharafi, S. The effect of milling time and composition on microstructural and magnetic properties of nanostructured Fe-Co alloys. J. Alloys Compd. 2009, 477, 45–50. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Name |
|---|---|
| Rod diameter | |
| Magnet outer diameter | |
| Pure iron outer diameter | |
| Pole pitch | |
| Cu tube—inner diameter | |
| Cu tube—outer diameter | |
| Damper—outer diameter | |
| Iron pole height |
| Material | Electrical Resistivity [Ωm] | ||
|---|---|---|---|
| Cu–ETP tube | 1.67 × 10−8 | 390 | 385 |
| ARMCO iron | 10.51 × 10−8 | 73.2 | 450 |
| SAE 4340 steel | 24.8 × 10−8 | 44.5 | 475 |
| Neodymium PM | 1.2 × 10−4 | 8.95 | 502 |
| Inconel 718 | 1.25 × 10−6 | 11.4 | 435 |
| Number of Elements | 928 | 1122 | 1235 | 1703 | 3643 | 11,716 |
|---|---|---|---|---|---|---|
 |  | 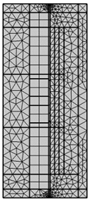 | 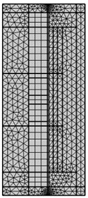 |  |  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jamolov, U.; Maizza, G. Integral Methodology for the Multiphysics Design of an Automotive Eddy Current Damper. Energies 2022, 15, 1147. https://doi.org/10.3390/en15031147
Jamolov U, Maizza G. Integral Methodology for the Multiphysics Design of an Automotive Eddy Current Damper. Energies. 2022; 15(3):1147. https://doi.org/10.3390/en15031147
Chicago/Turabian StyleJamolov, Umid, and Giovanni Maizza. 2022. "Integral Methodology for the Multiphysics Design of an Automotive Eddy Current Damper" Energies 15, no. 3: 1147. https://doi.org/10.3390/en15031147
APA StyleJamolov, U., & Maizza, G. (2022). Integral Methodology for the Multiphysics Design of an Automotive Eddy Current Damper. Energies, 15(3), 1147. https://doi.org/10.3390/en15031147