
Possibility to Use Professional Bicycle Computers for the Scientific Evaluation of Electric Bikes: Trajectory, Distance, and Slope Data



Abstract
:1. Introduction
2. Materials and Methods
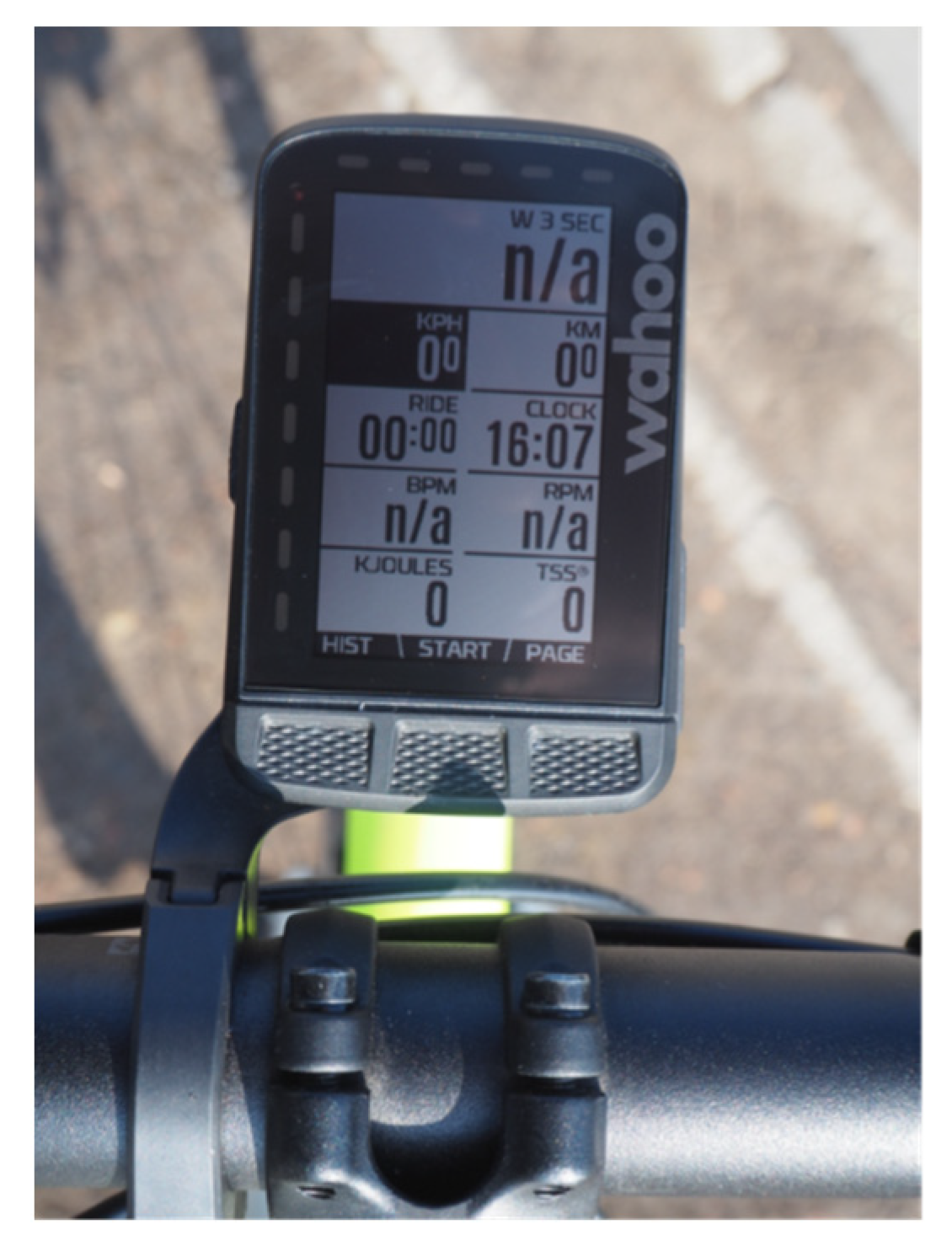
2.1. Materials: Electric Bike and Measuring Equipment
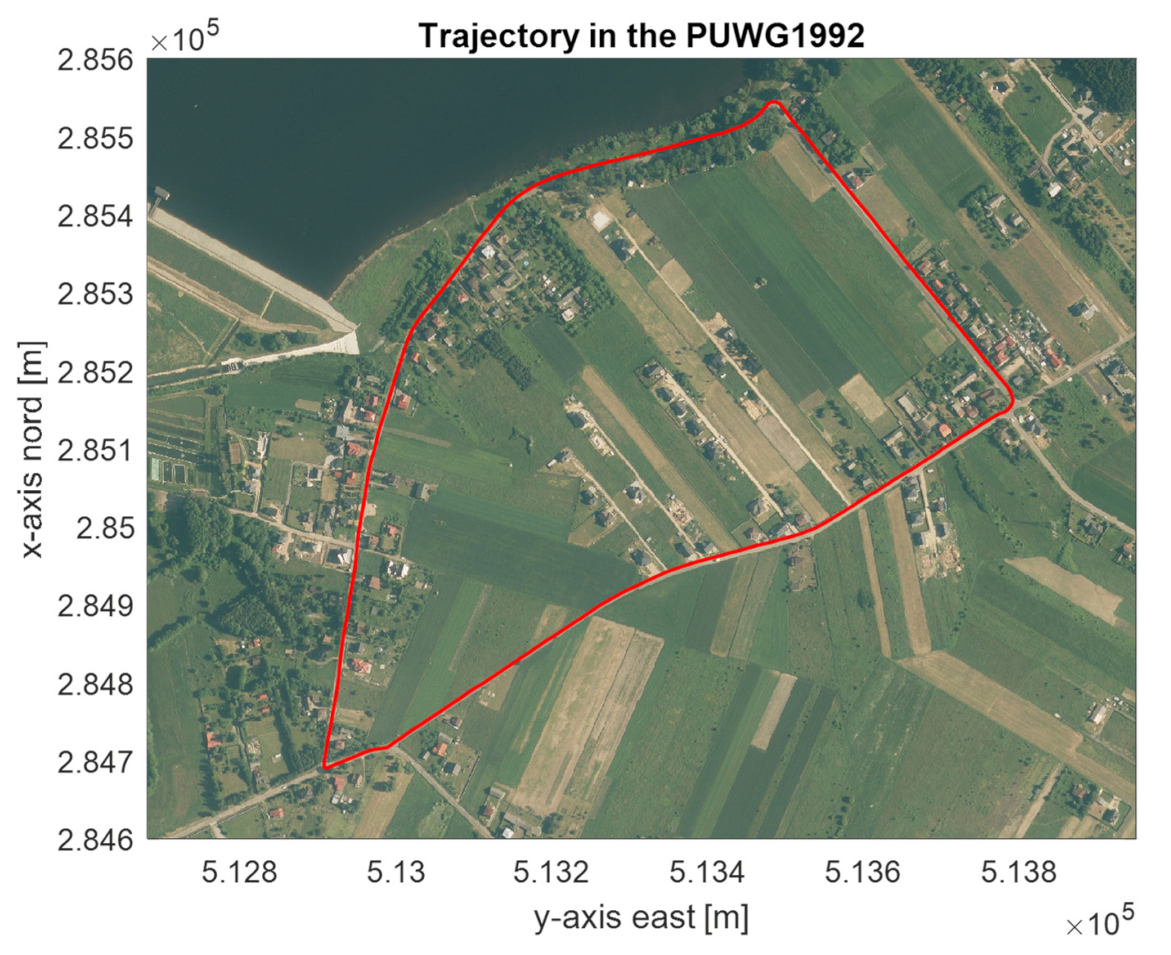
2.2. Materials: Test Route
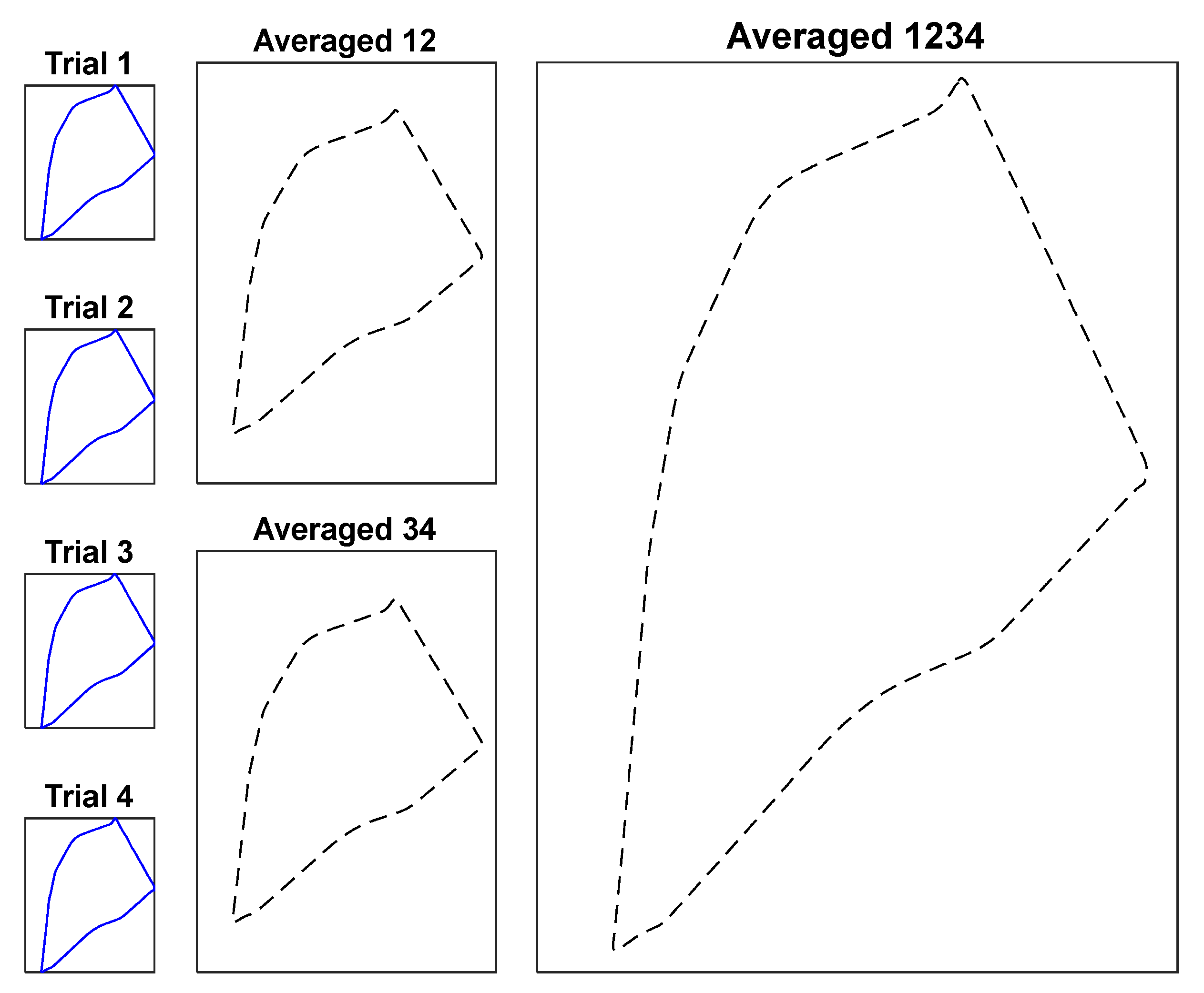
2.3. Methods: Trials
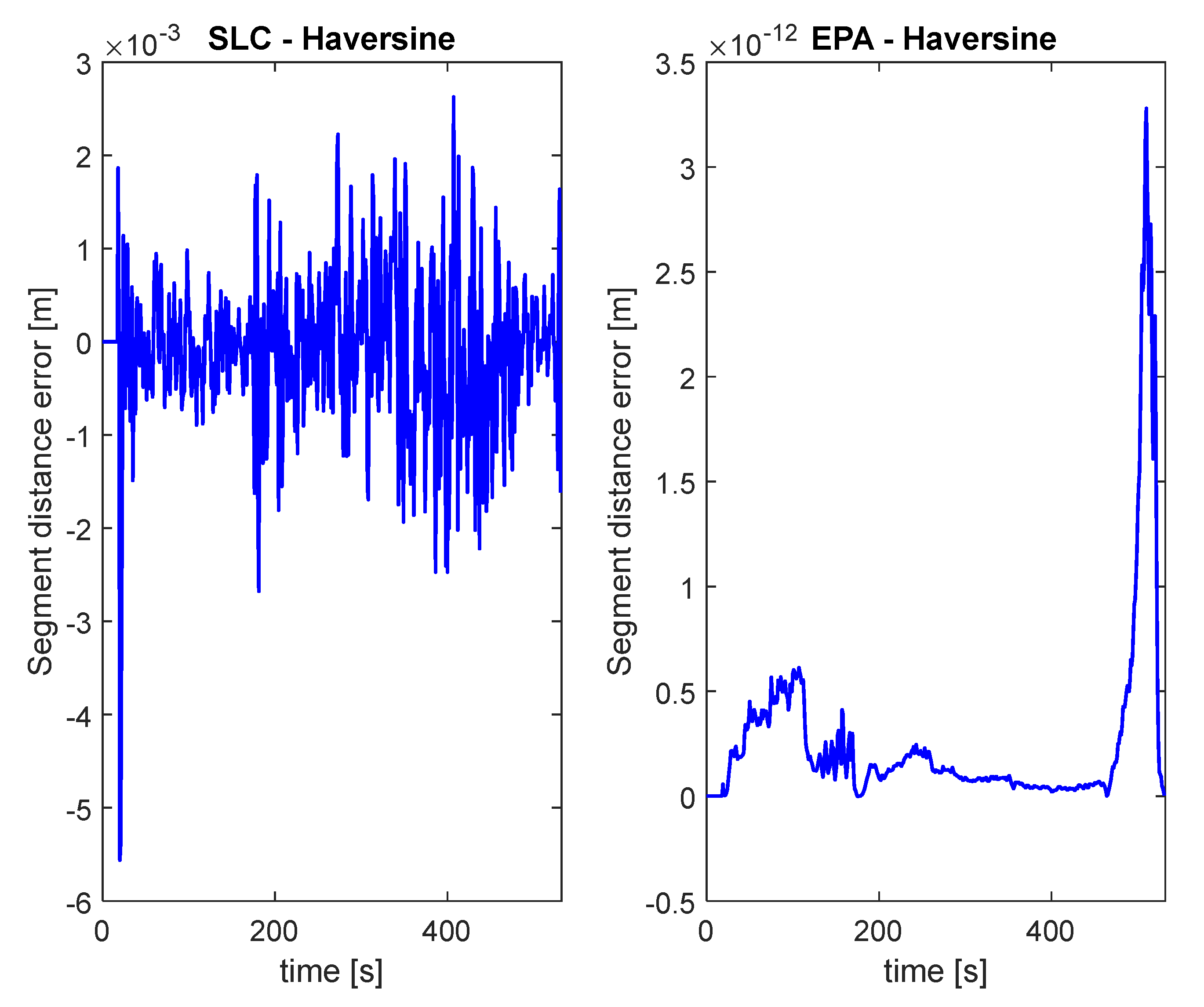
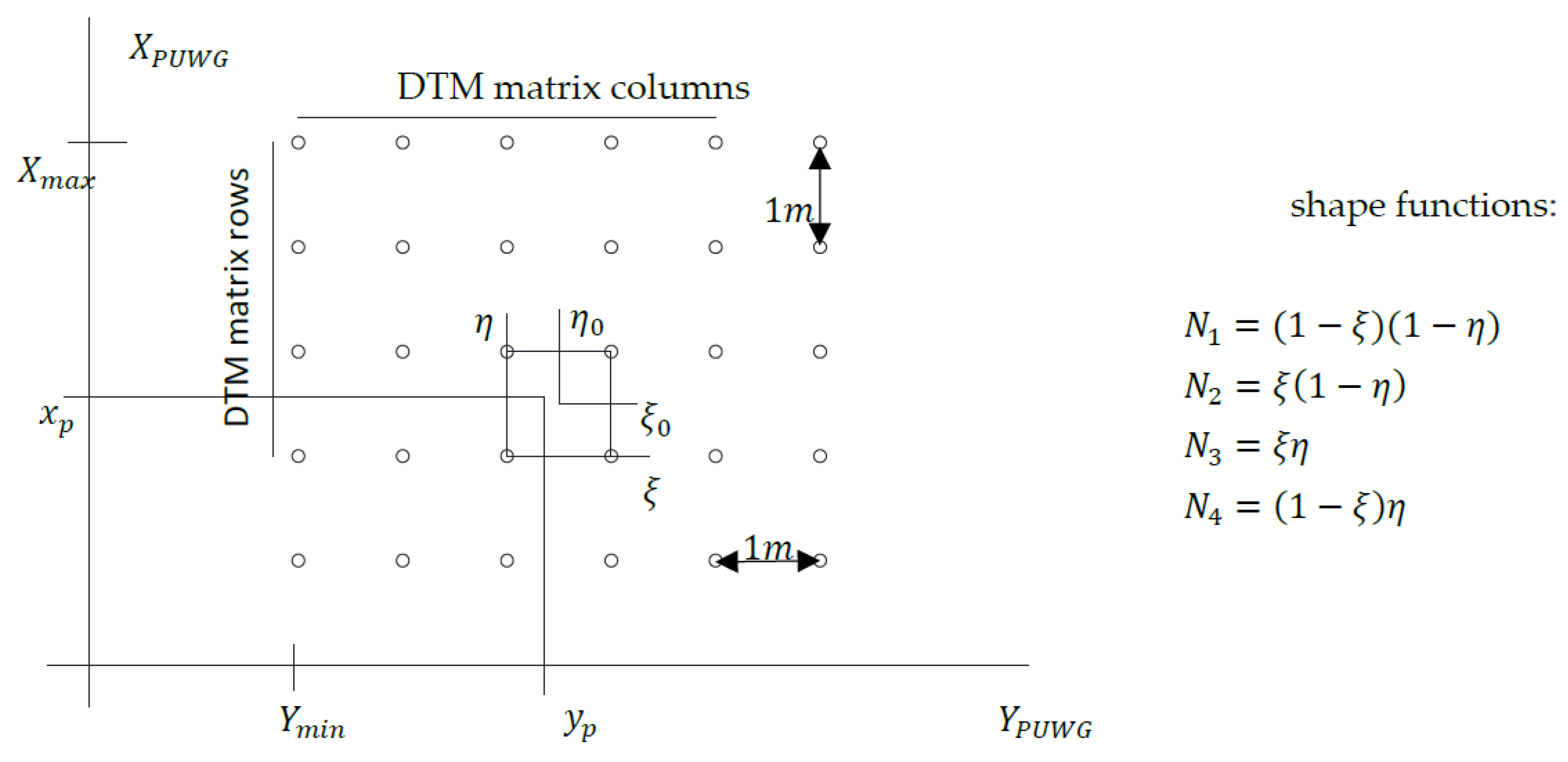
2.4. Methods: Evaluation of Altitude and Slope Data
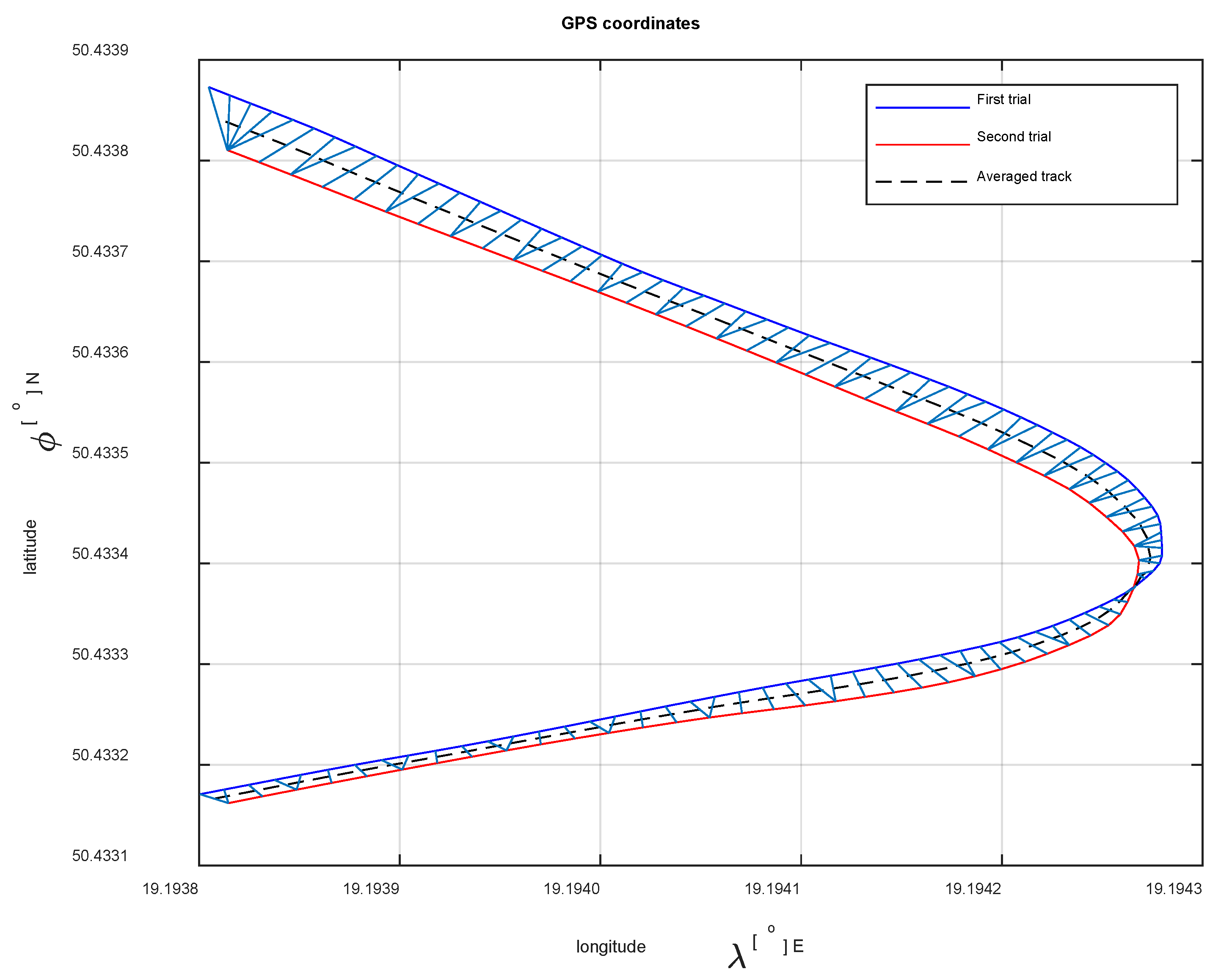
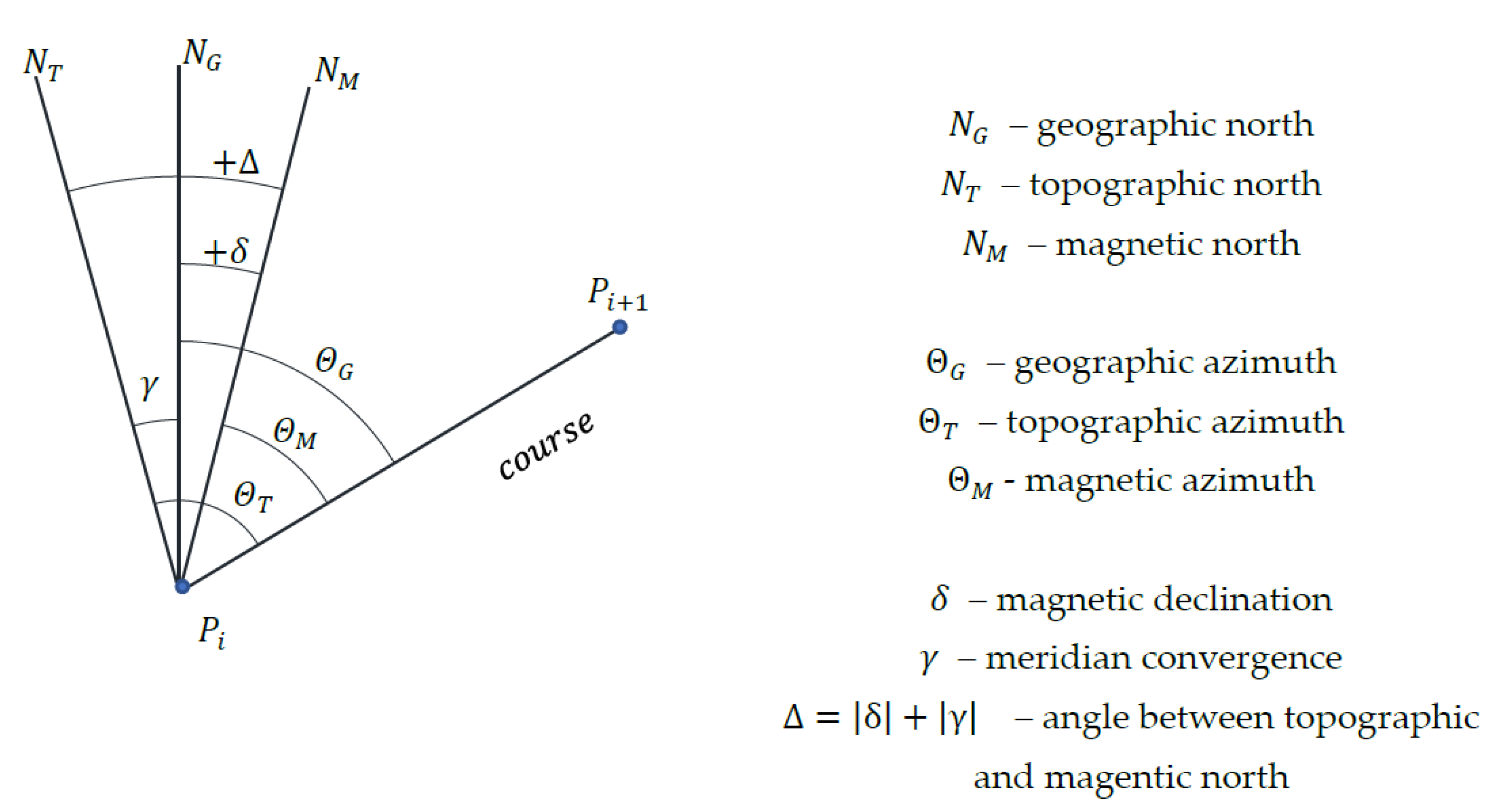
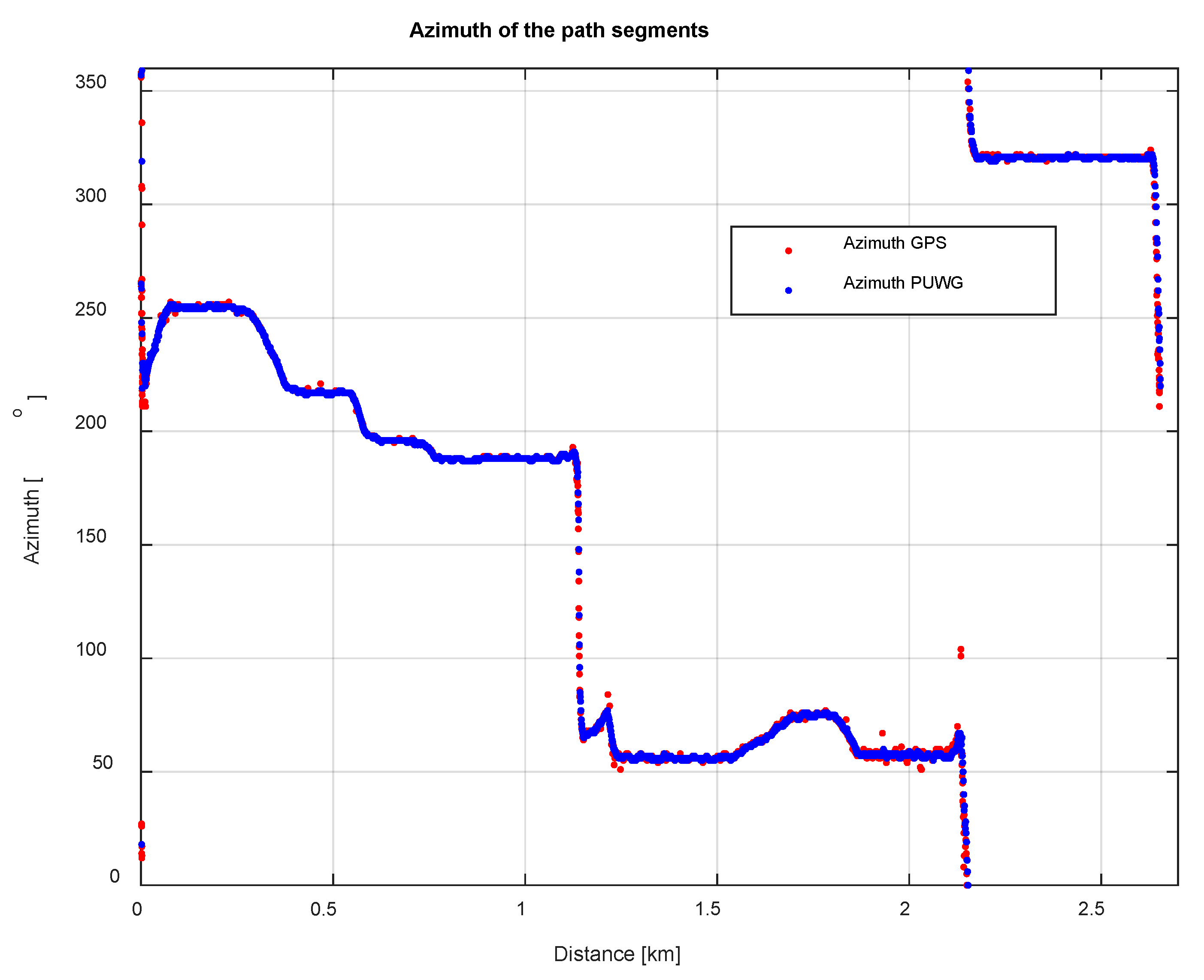
2.5. Methods: Azimuth of Trajectory Segment
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Charvátová, H.; Procházka, A.; Vyšata, O. Motion Assessment for Accelerometric and Heart Rate Cycling Data Analysis. Sensors 2020, 20, 1523. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karetnikov, A.D. Application of Data-Driven Analytics on Sport Data from A Professional Bicycle Racing Team. Master’s Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2019. [Google Scholar]
- Chen, F.; Turoń, K.; Kłos, M.; Czech, P.; Pamuła, W.; Sierpiński, G. Fifth-generation bikesharing systems: Examples from Poland and China. Sci. J. Sil. Univ. Technol. Ser. Transp. 2018, 99, 05–13. [Google Scholar]
- Hurwitz, D.; Horne, D.; Jashami, H.; Abadi, M. Bicycling Simulator Calibration: Speed and Steering Latency; Pacific Northwest Transportation Consortium: Seattle, WA, USA, 2019; Volume 12, pp. 1–21. [Google Scholar]
- Favero Electronisc SLR. Influence of Angular Velocity of Pedaling on the Accuracy of the Measurement of Cyclist Power. Research article. Available online: https://cycling.favero.com/ (accessed on 18 January 2022).
- Desai, E.; Wang, P.; Suway, J.; Engleman, K. Bicycle GPS Positional Accuracy; SAE Technical Paper; SAE: Warrendale, PA, USA, 2021; Volume 1, pp. 1–7. [Google Scholar]
- Lißner, S.; Huber, S. Facing the needs for clean bicycle data—A bicycle-specific approach of GPS data processing. Eur. Transport. Res. Rev. 2021, 13, 1–14. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman. Filter. In Computer Graphics; Addison-Wesley: Boston, MA, USA; ACM Press: Los Angeles, CA, USA, 2001. [Google Scholar]
- Deep, A.; Mittal, M.; Mittal, V. Application of Kalman Filter in GPS Position Estimation. In Proceedings of the IEEE 8th Power India International Conference (Piicon), Jaipur, India, 13–15 December 2018. [Google Scholar]
- Gabaglio, V.; Ladetto, Q.; Merminod, B. Kalman Filter Approach for Augmented GPS Pedestrian Navigation; GNSS: Sevilla, Spain, 2001; pp. 1–5. [Google Scholar]
- Beato, M.; Bartolini, D.; Ghia, G.; Zamparo, P. Accuracy of a 10 Hz GPS Unit in Measuring Shuttle Velocity Performed at Different Speeds and Distances (5–20 M). J. Hum. Kinetics 2016, 54, 15–22. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ranacher, P.; Brunauer, R.; van der Spek, S.; Reich, S. What is an Appropriate Temporal Sampling Rate to Record Floating Car Data with a GPS? ISPRS Int. J. Geo-Inf. 2016, 5, 1. [Google Scholar] [CrossRef] [Green Version]
- Jiménez-Meza, A.; Arámburo-Lizárraga, J.; de la Fuente, E. Framework for Estimating Travel Time, Di-stance, Speed, and Street Segment Level Of Service (LOS), based on GPS Data. Procedia Technol. 2013, 7, 61–70. [Google Scholar] [CrossRef] [Green Version]
- Vaughan, N.; Gabrys, B. Comparing and combining time series trajectories using Dynamic Time Warping. Procedia Comput. Sci. 2016, 96, 465–474. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Mariescu-Istodor, R.; Fränti, P. Three Rapid Methods for Averaging GPS Segments. Appl. Sci. 2019, 9, 4899. [Google Scholar] [CrossRef] [Green Version]
- Marteau, P.-F. Estimating Road Segments Using Kernelized Averaging of GPS Trajectories. Appl. Sci. 2019, 9, 2736. [Google Scholar] [CrossRef] [Green Version]
- Karney, C. Algorithms for geodesics. J. Geod. 2013, 87, 43–55. [Google Scholar] [CrossRef] [Green Version]
- Moritz, H. Geodetic Reference System 1980. J. Geod. 2000, 74, 128–133. [Google Scholar] [CrossRef]
- Szymanski, Z.; Jankowski, S.; Szczyrek, J. Reconstruction of environment model by using radar vector field histograms. In Photonics Applications in Astronomy, Communications, Industry, and High-Energy Physics Experiments; International Society for Optics and Photonics: Bellingham, WA, USA, 2012; Volume 8454, pp. 1–8. [Google Scholar]
- Geoportal. Available online: https://mapy.geoportal.gov.pl (accessed on 5 December 2021).
- Zaliva, V.; Franchetti, F. Barometric and GPS altitude sensor fusion. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 7525–7529. [Google Scholar]
- Wahoo Product FAQ. Available online: https://eu.wahoofitness.com/ (accessed on 18 January 2022).
- Osman, I. Wind speed, wind yaw and the aerodynamic drag acting on a bicycle and rider. J. Sci. Cycl. 2015, 4, 42–50. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trial | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| Time [s] | 469 | 353 | 342 | 344 | 394 | 532 | 440 | 398 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matyja, T.; Kubik, A.; Stanik, Z. Possibility to Use Professional Bicycle Computers for the Scientific Evaluation of Electric Bikes: Trajectory, Distance, and Slope Data. Energies 2022, 15, 758. https://doi.org/10.3390/en15030758
Matyja T, Kubik A, Stanik Z. Possibility to Use Professional Bicycle Computers for the Scientific Evaluation of Electric Bikes: Trajectory, Distance, and Slope Data. Energies. 2022; 15(3):758. https://doi.org/10.3390/en15030758
Chicago/Turabian StyleMatyja, Tomasz, Andrzej Kubik, and Zbigniew Stanik. 2022. "Possibility to Use Professional Bicycle Computers for the Scientific Evaluation of Electric Bikes: Trajectory, Distance, and Slope Data" Energies 15, no. 3: 758. https://doi.org/10.3390/en15030758
APA StyleMatyja, T., Kubik, A., & Stanik, Z. (2022). Possibility to Use Professional Bicycle Computers for the Scientific Evaluation of Electric Bikes: Trajectory, Distance, and Slope Data. Energies, 15(3), 758. https://doi.org/10.3390/en15030758