
Detent Force Minimization of Double-Sided Permanent Magnet Linear Synchronous Machine with 120° Phase Belt Toroidal Windings by Slot-Shift Structure



Abstract
:1. Introduction
2. Structure and Detent Force of 120°-TWDSPMLSM
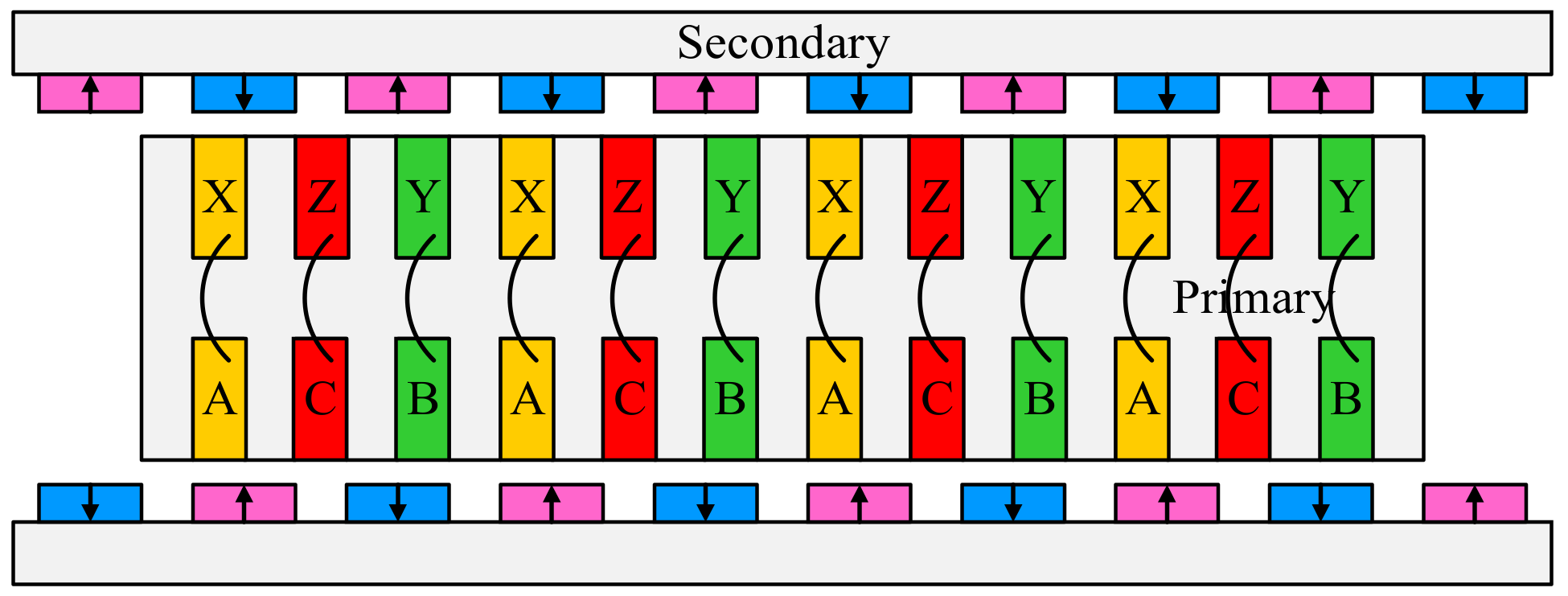
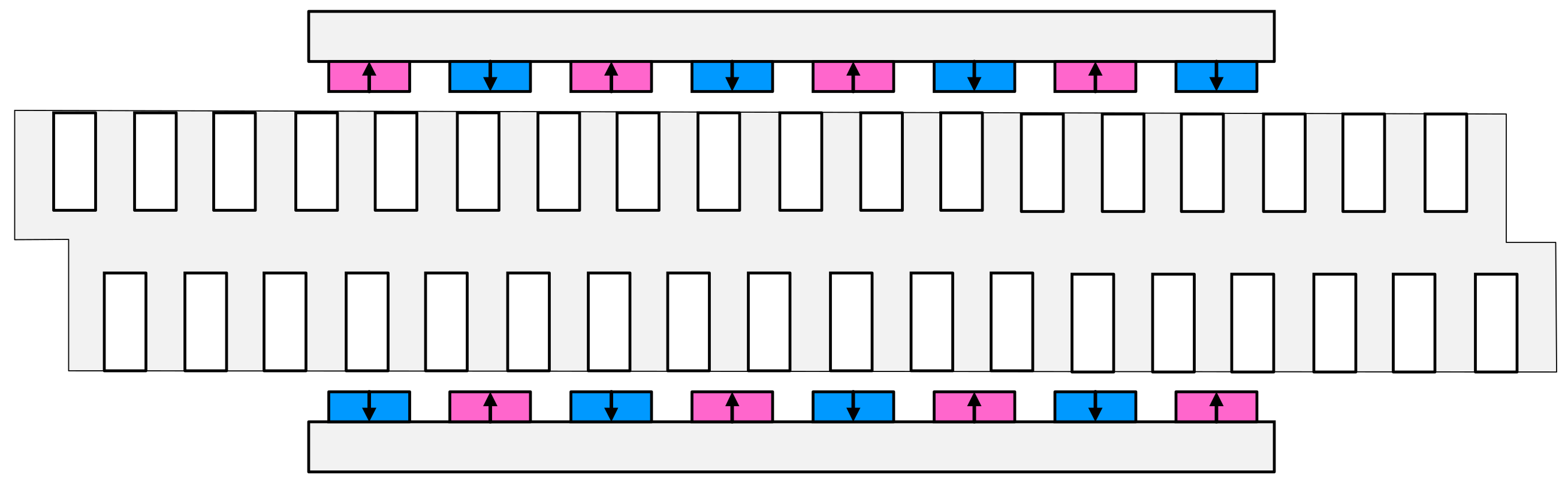
2.1. Structure of 120°-TWDSPMLSM
2.2. Detent Force of 120°-TWDSPMLSM
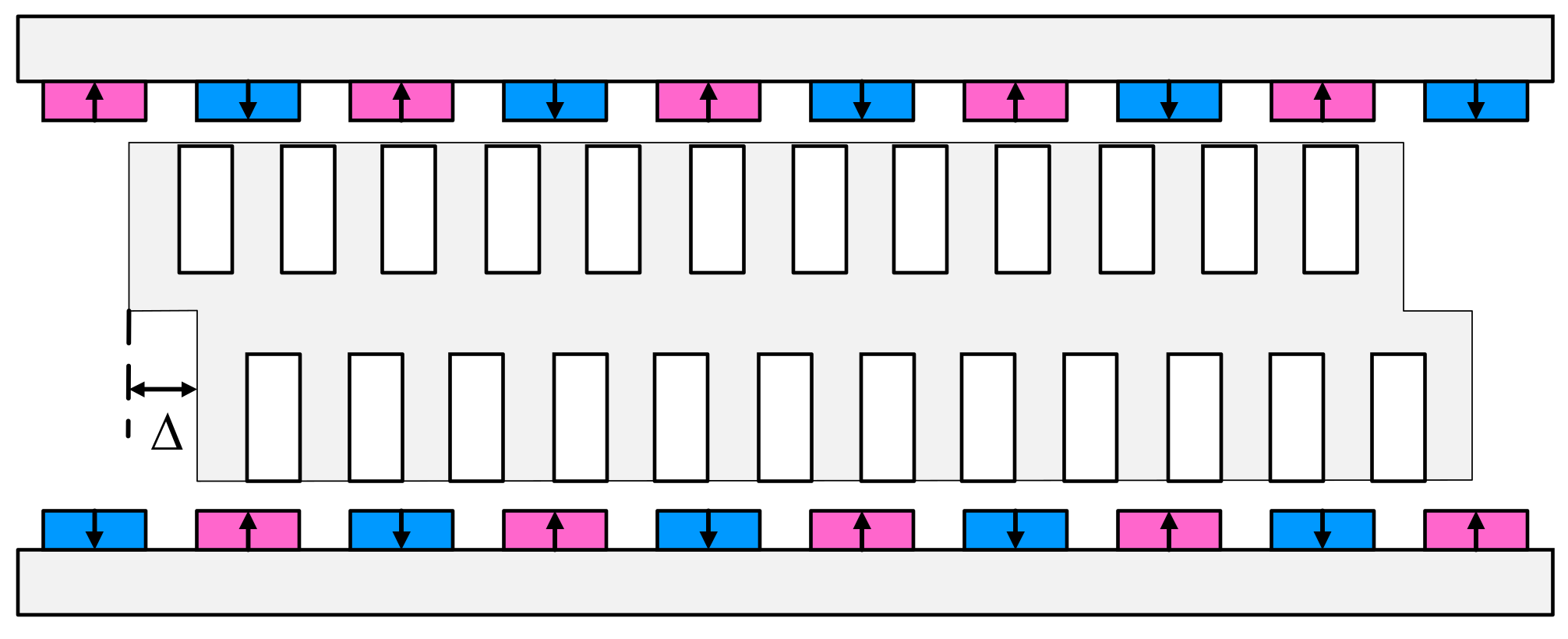
2.3. Slot-Shift Structure of 120°-TWDSPMLSM
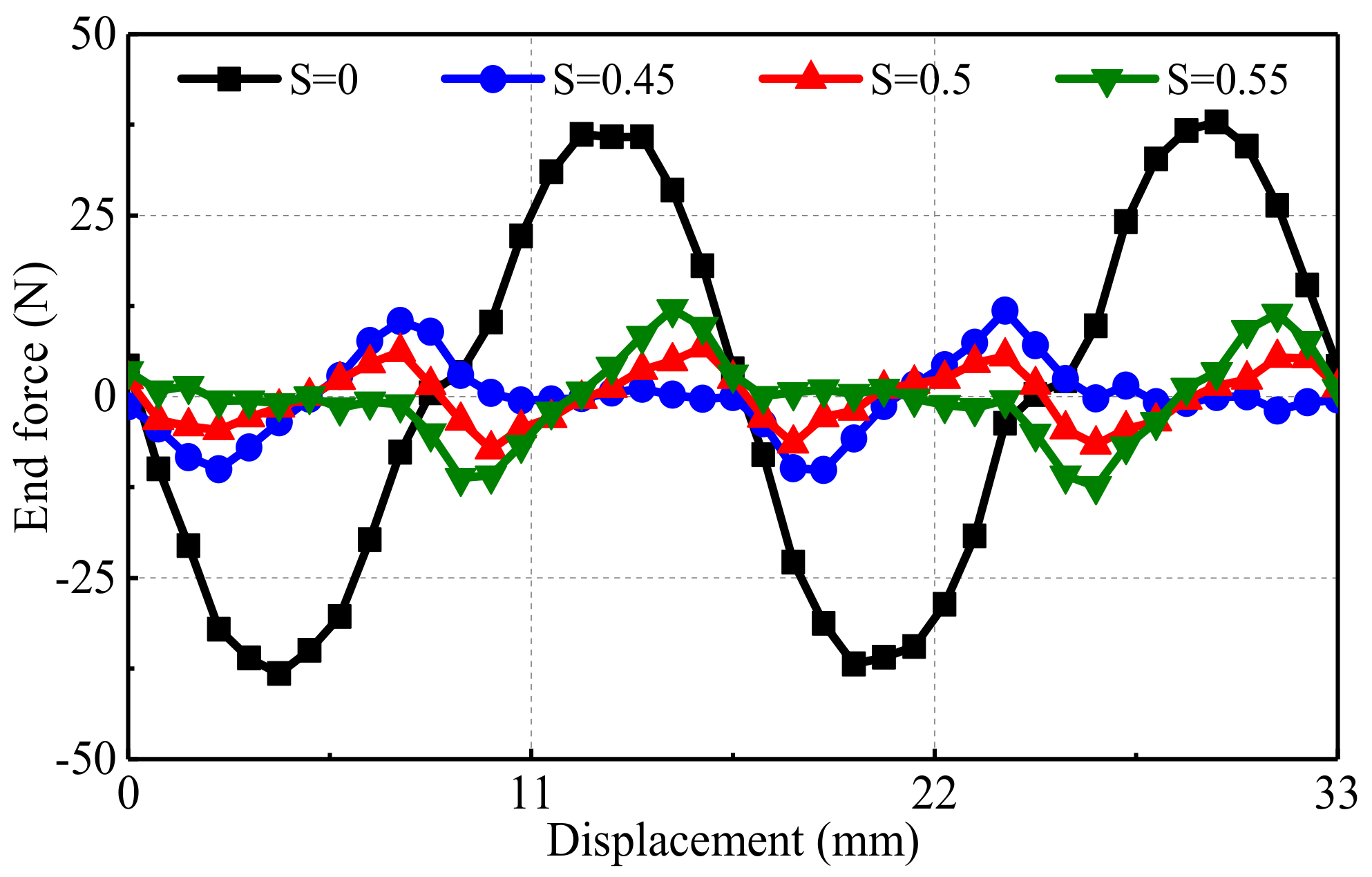
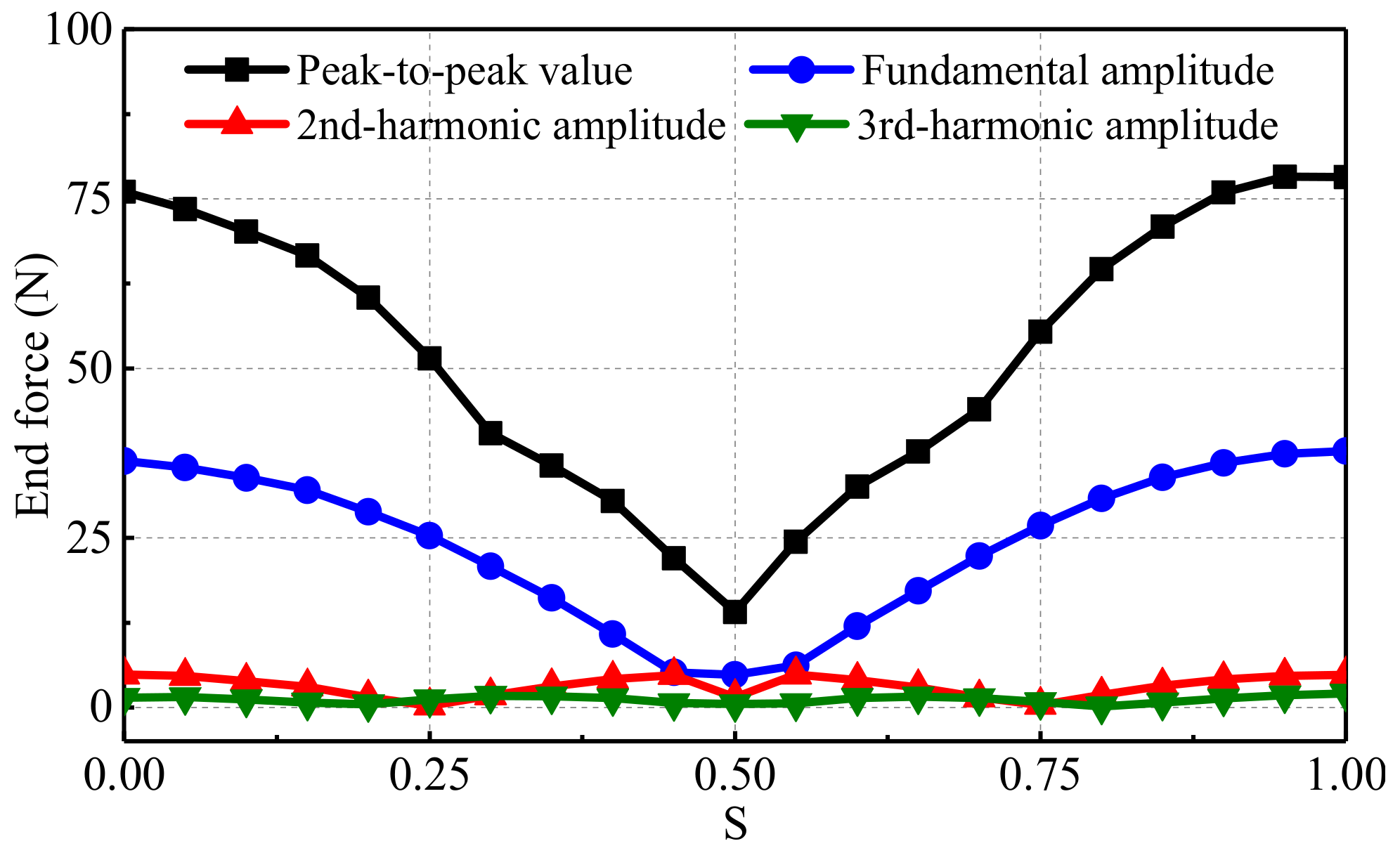
3. Analysis of End Force
3.1. Theoretical Analysis of End Force
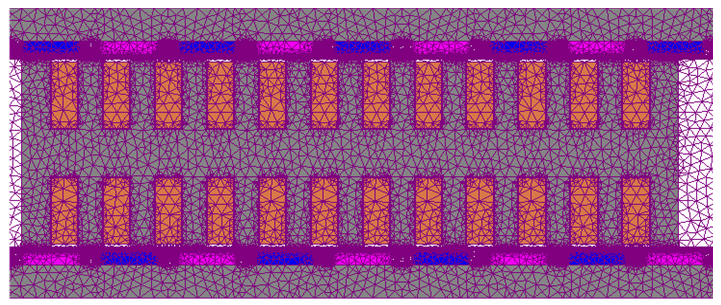
3.2. Simulation and Verification of End Force
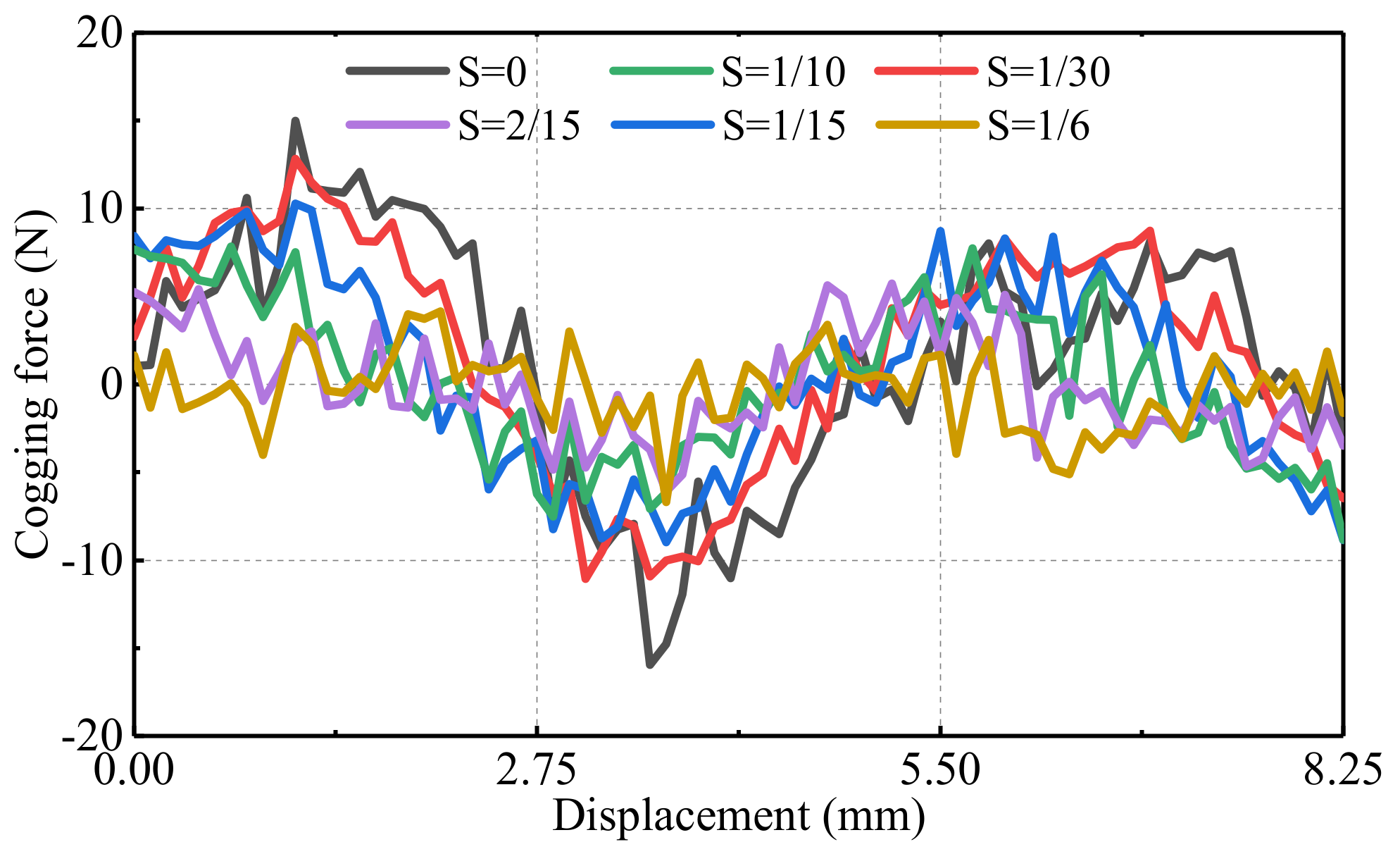
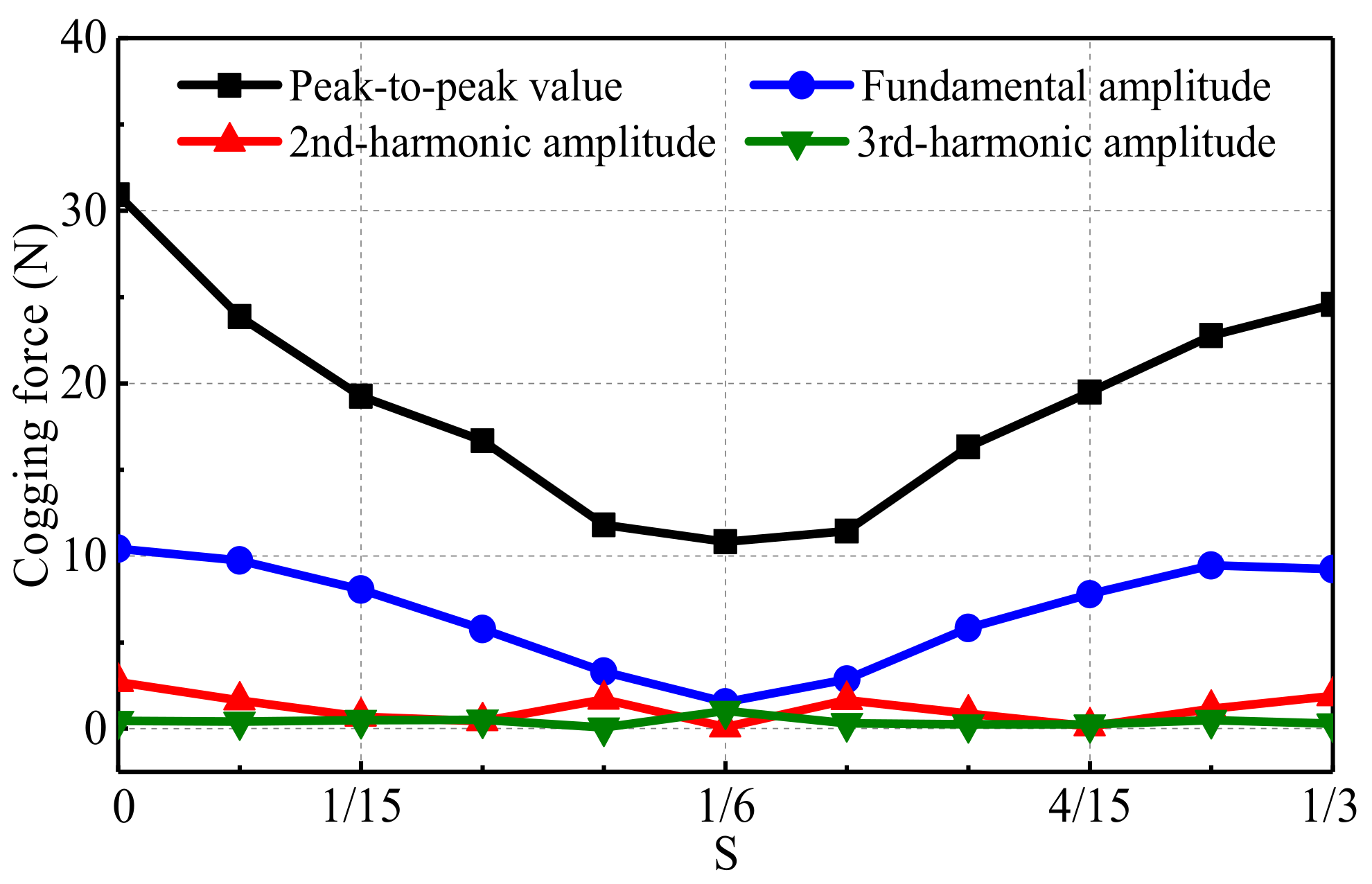
4. Analysis of Cogging Force
4.1. Theoretical Analysis of Cogging Force
4.2. Simulation and Verification of Cogging Force
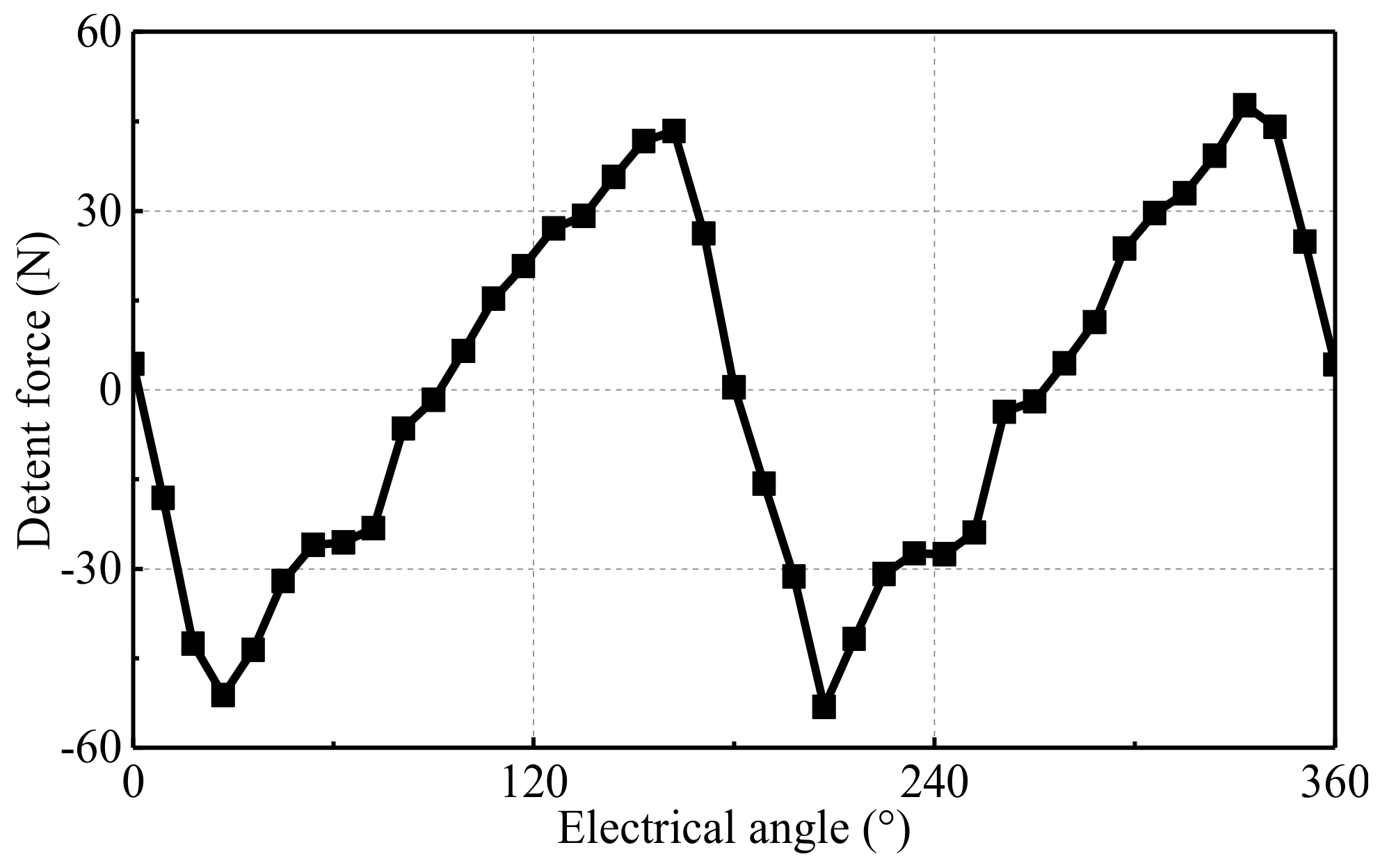
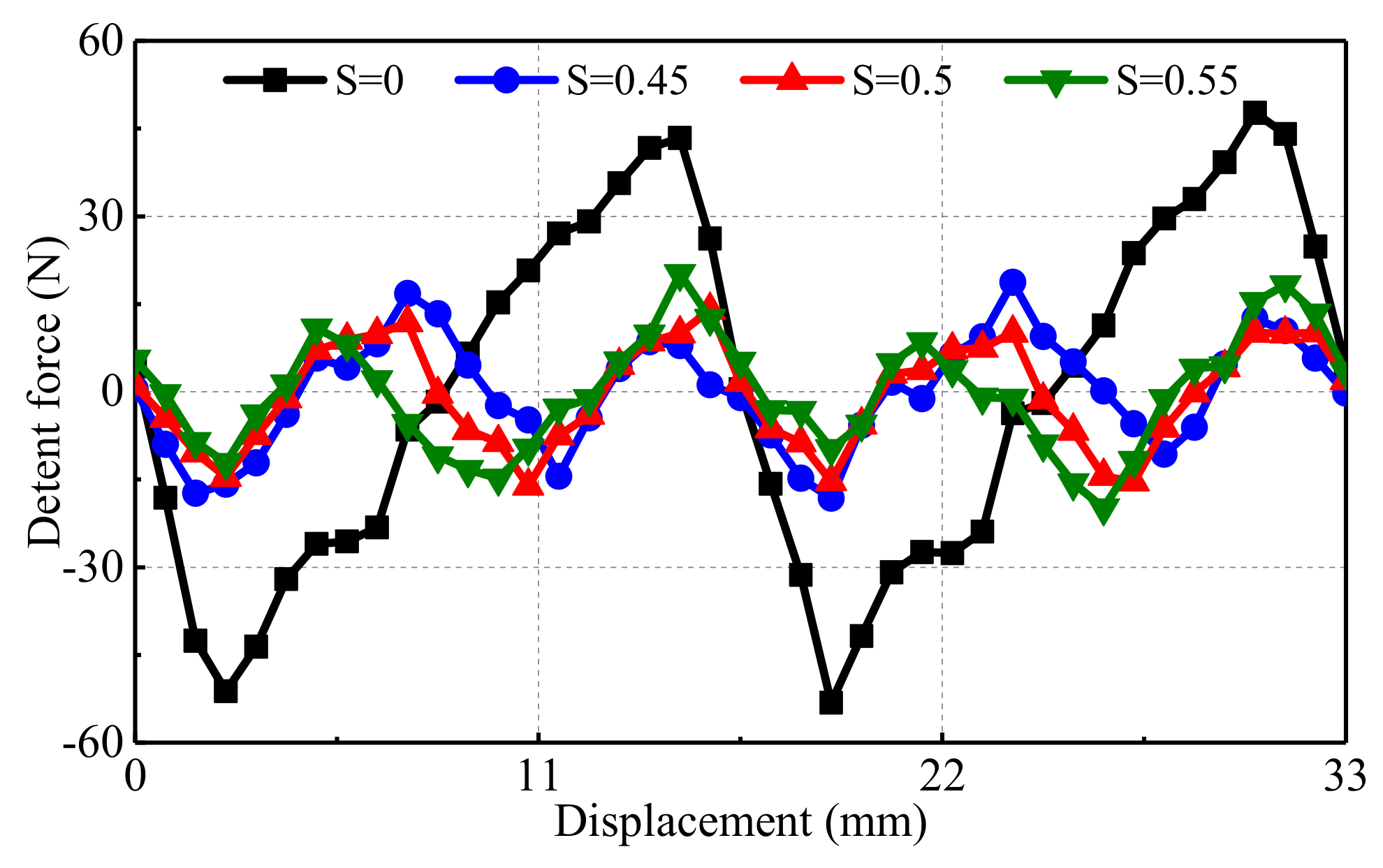
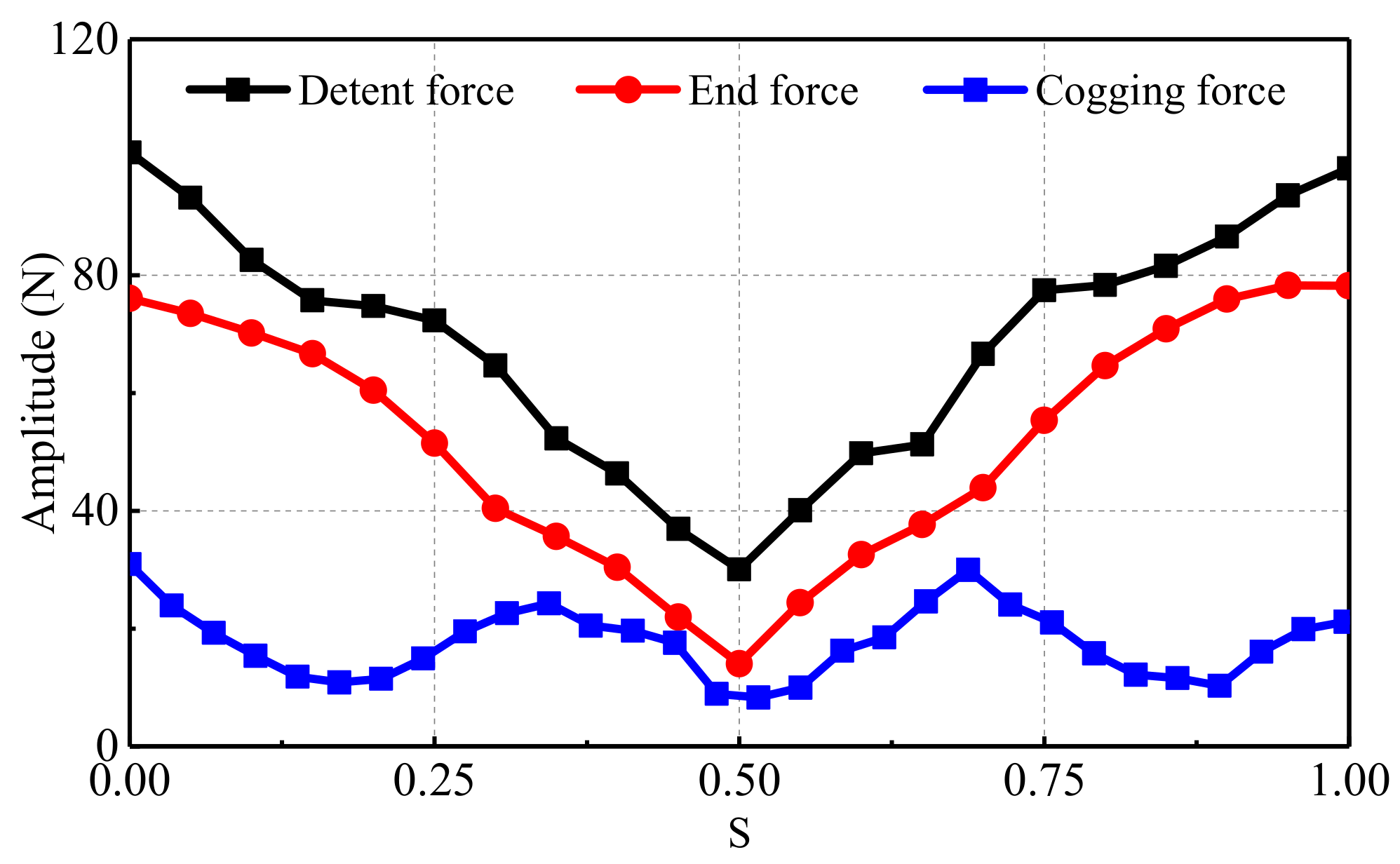
5. Simulation of Detent Force
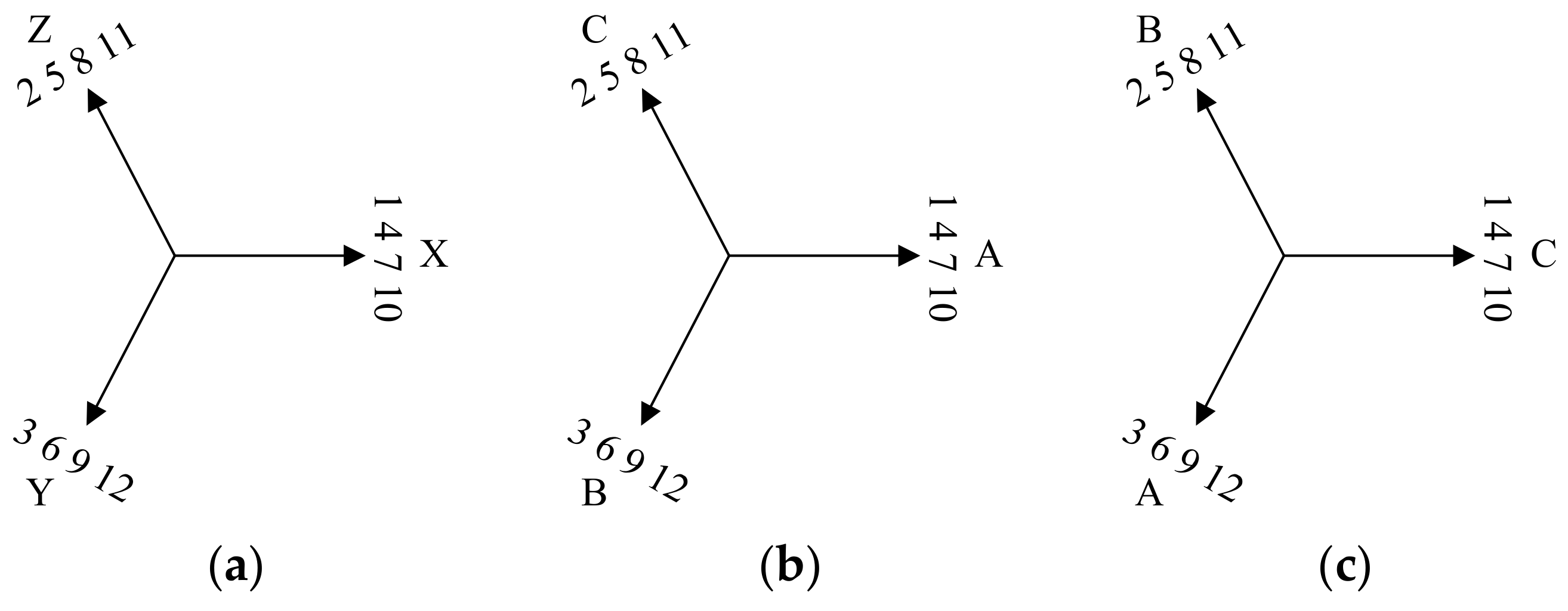
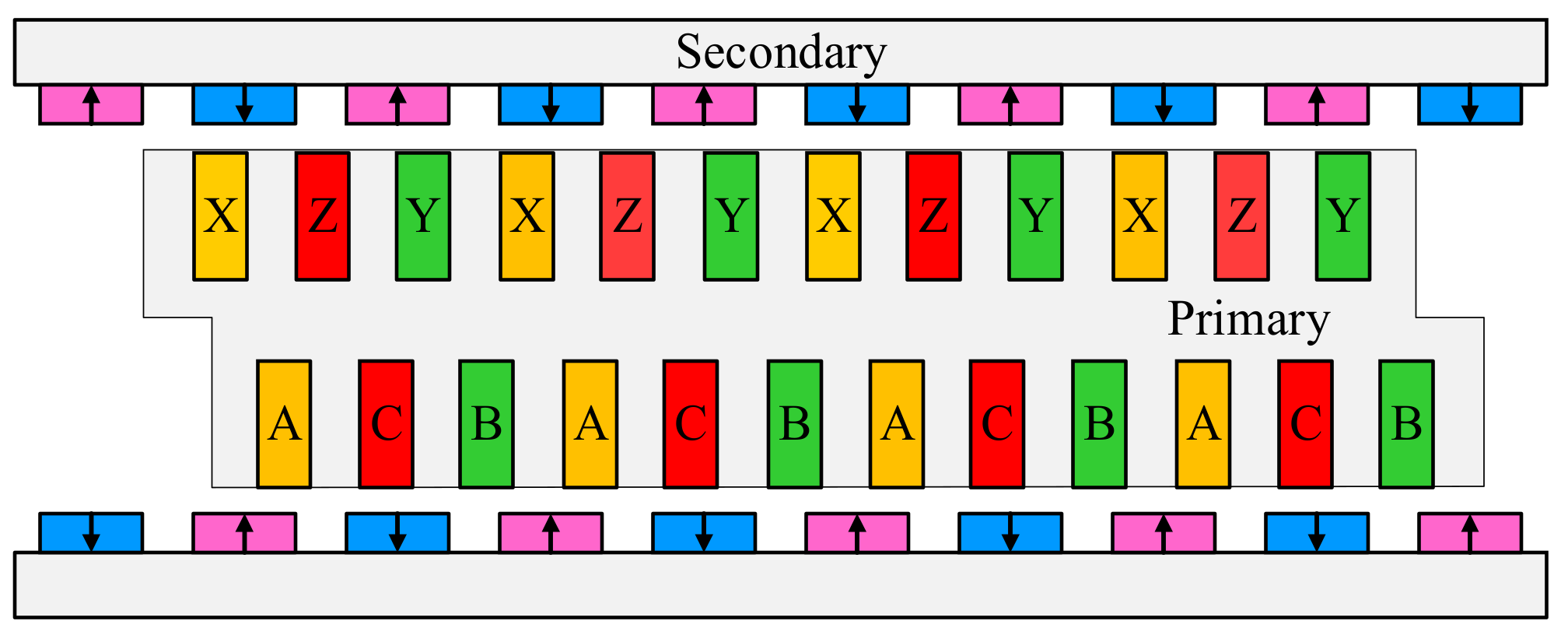
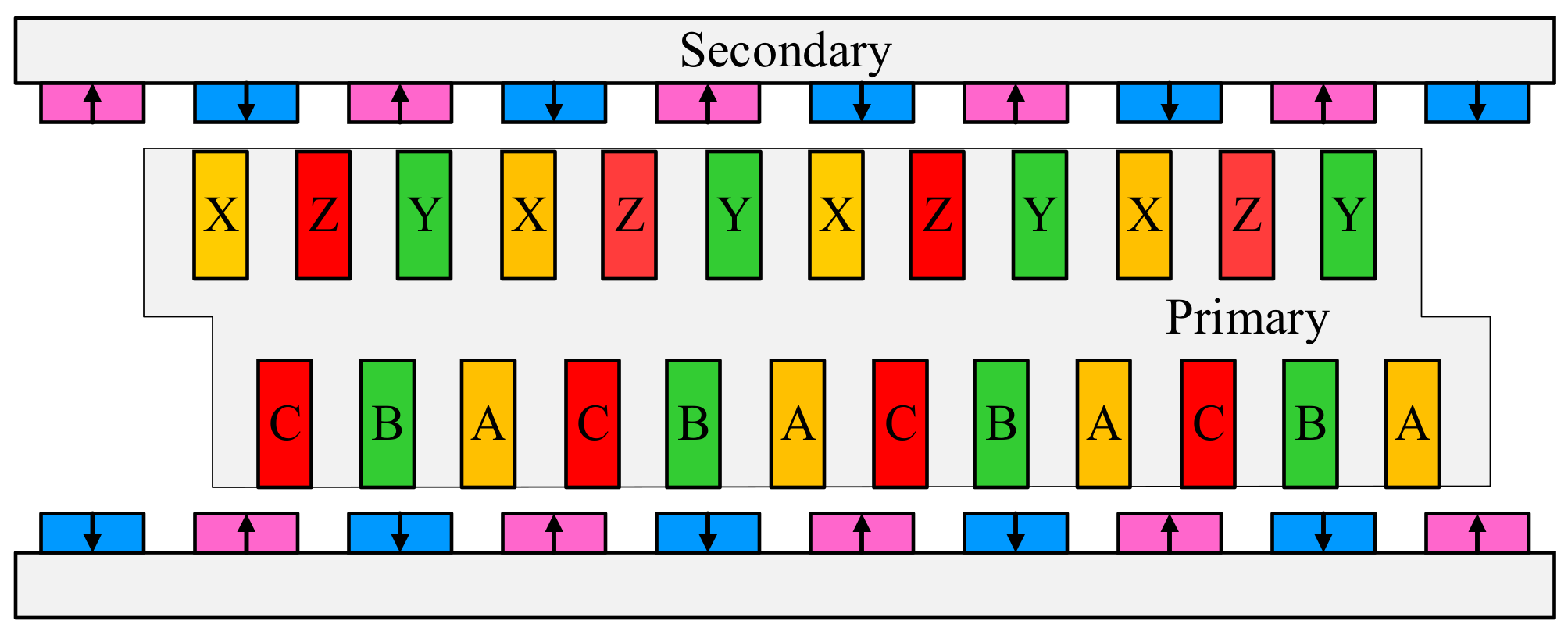
6. Winding Arrangements and Characteristic Analysis
6.1. Arrangement of 120°-TW
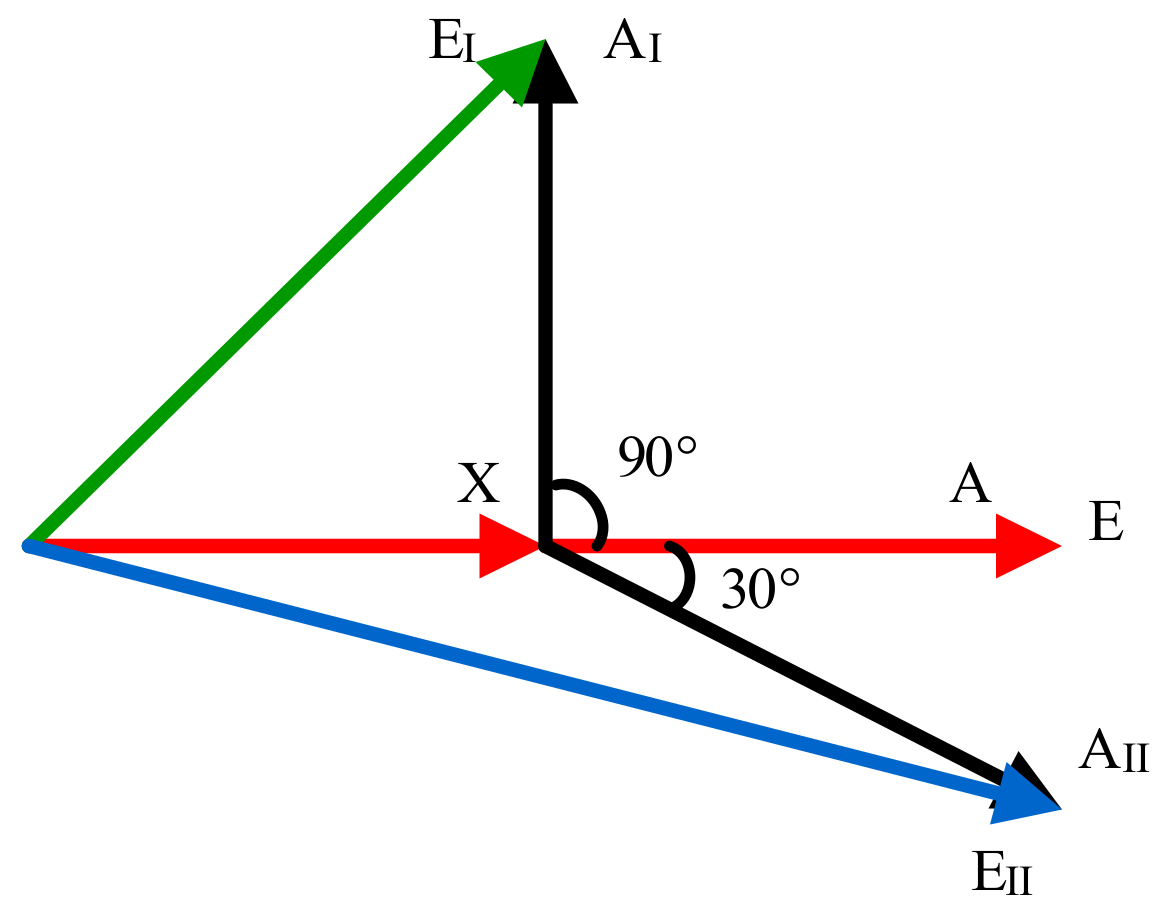
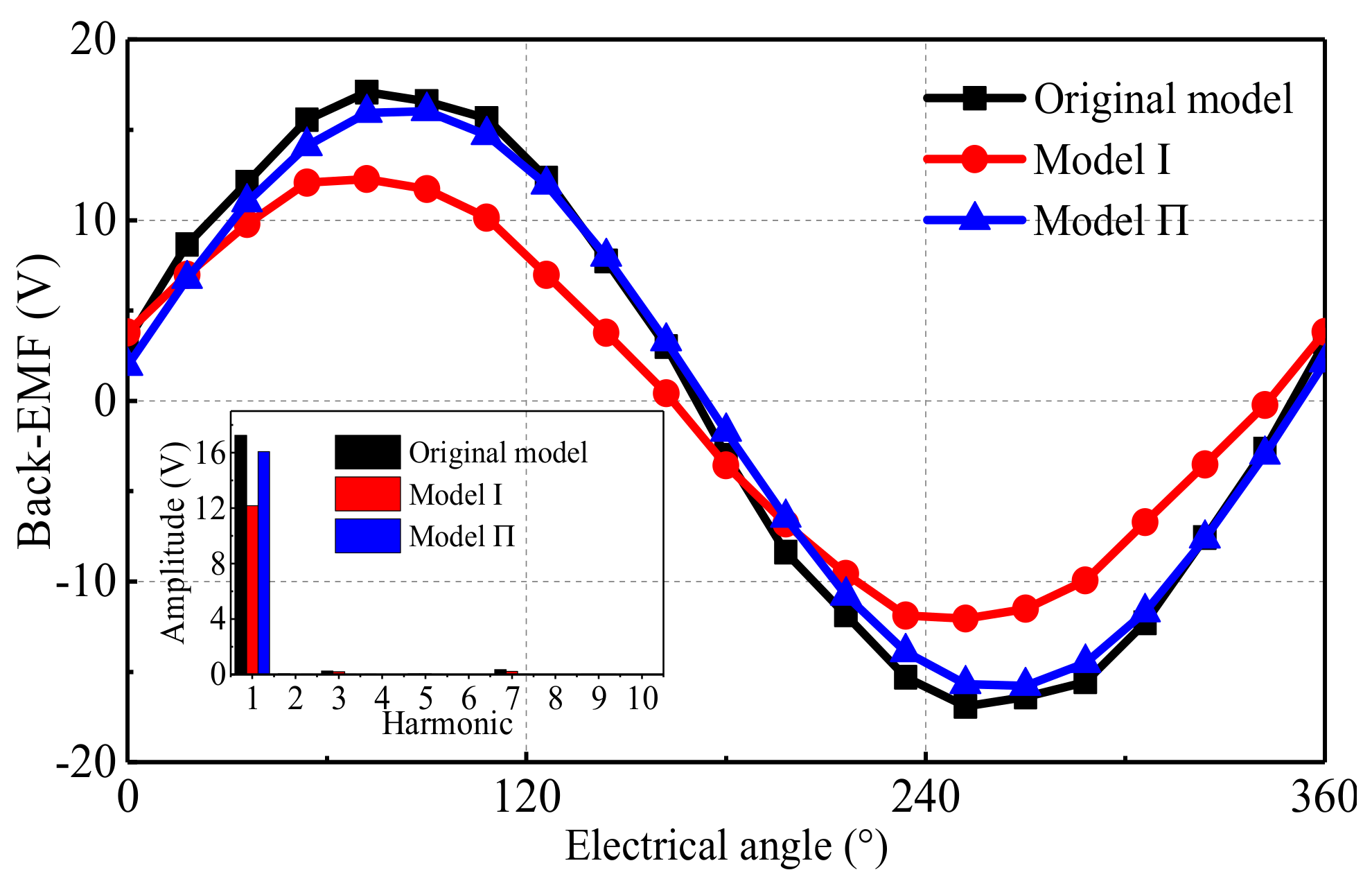
6.2. Back-EMF Characteristic
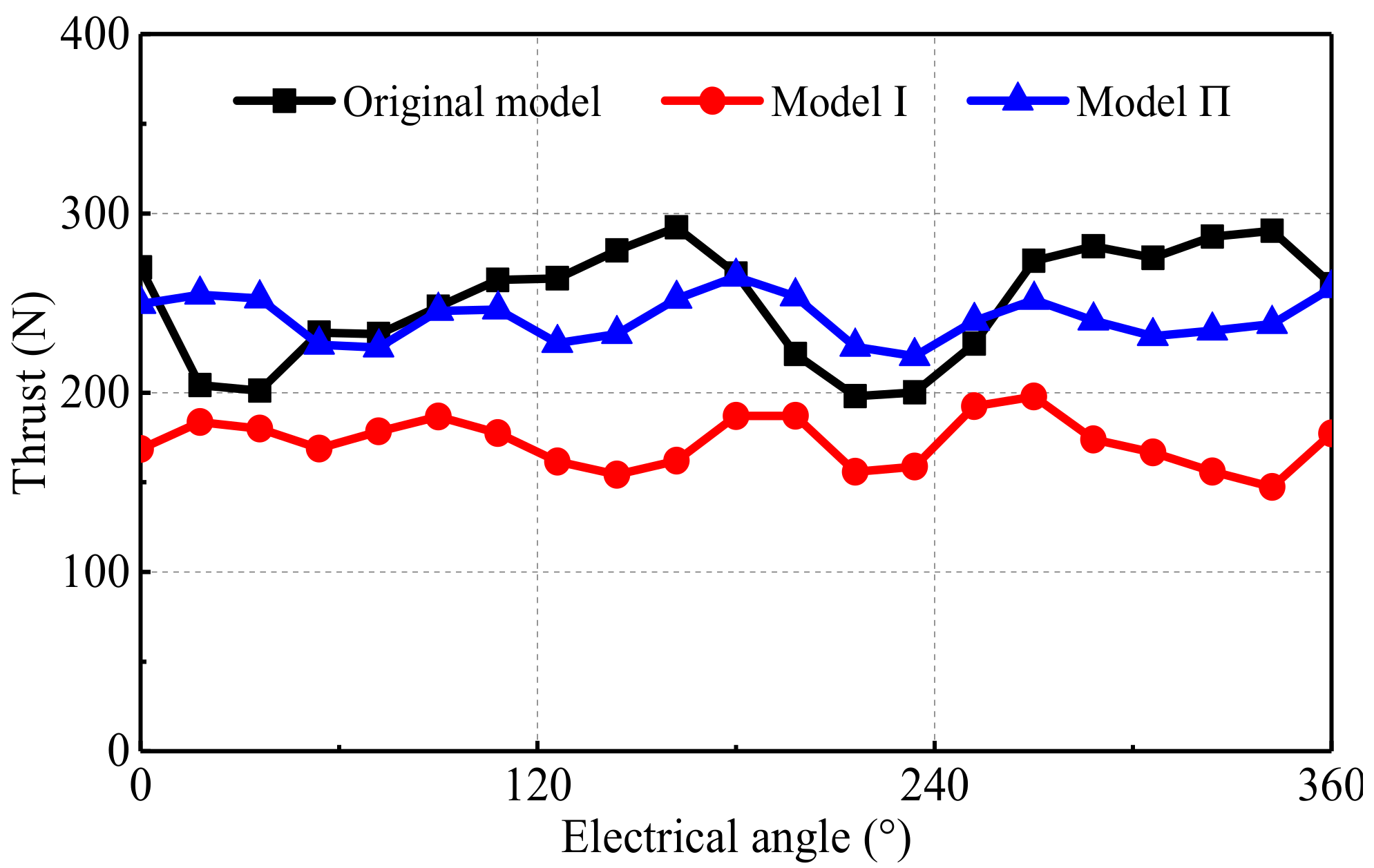
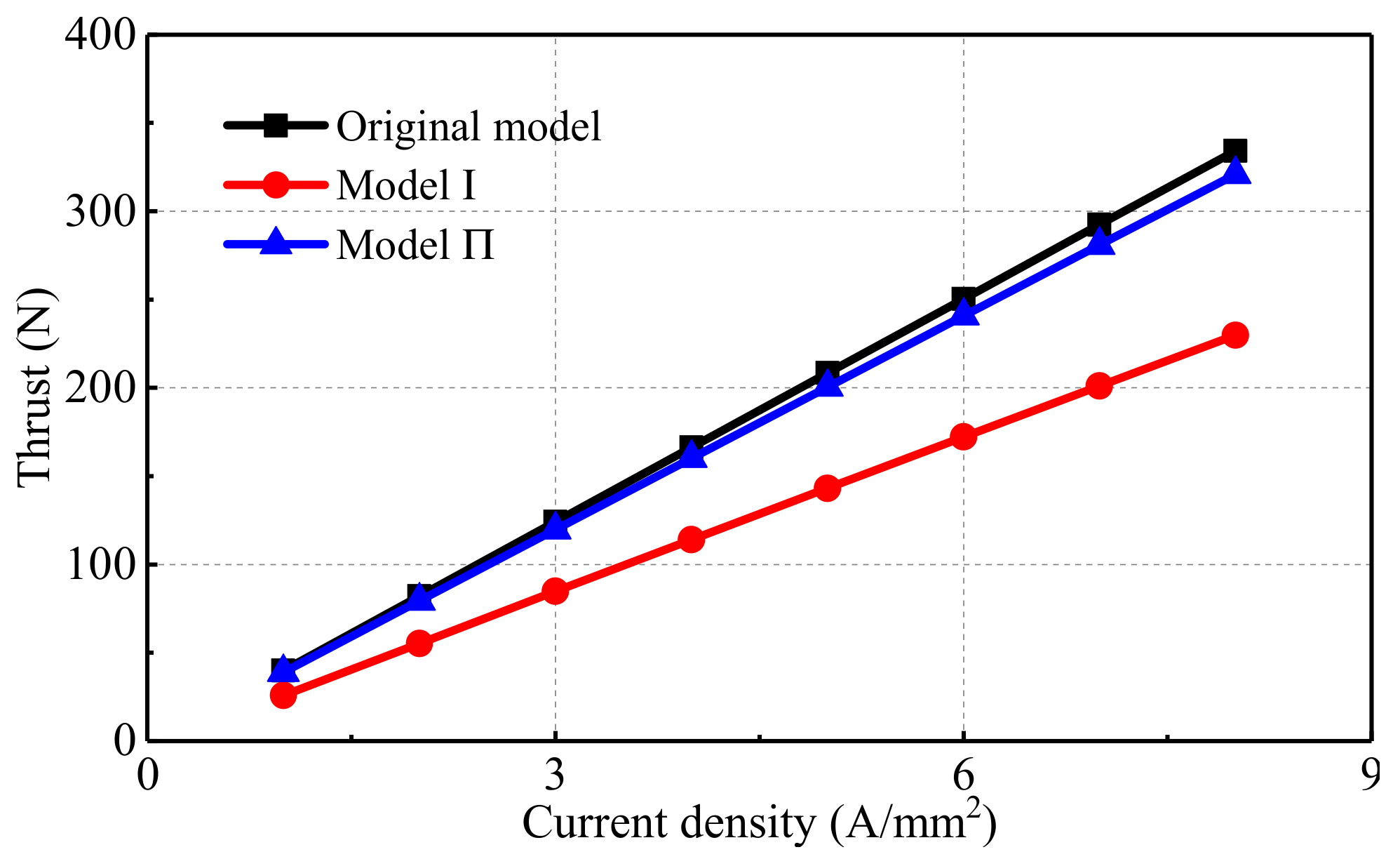
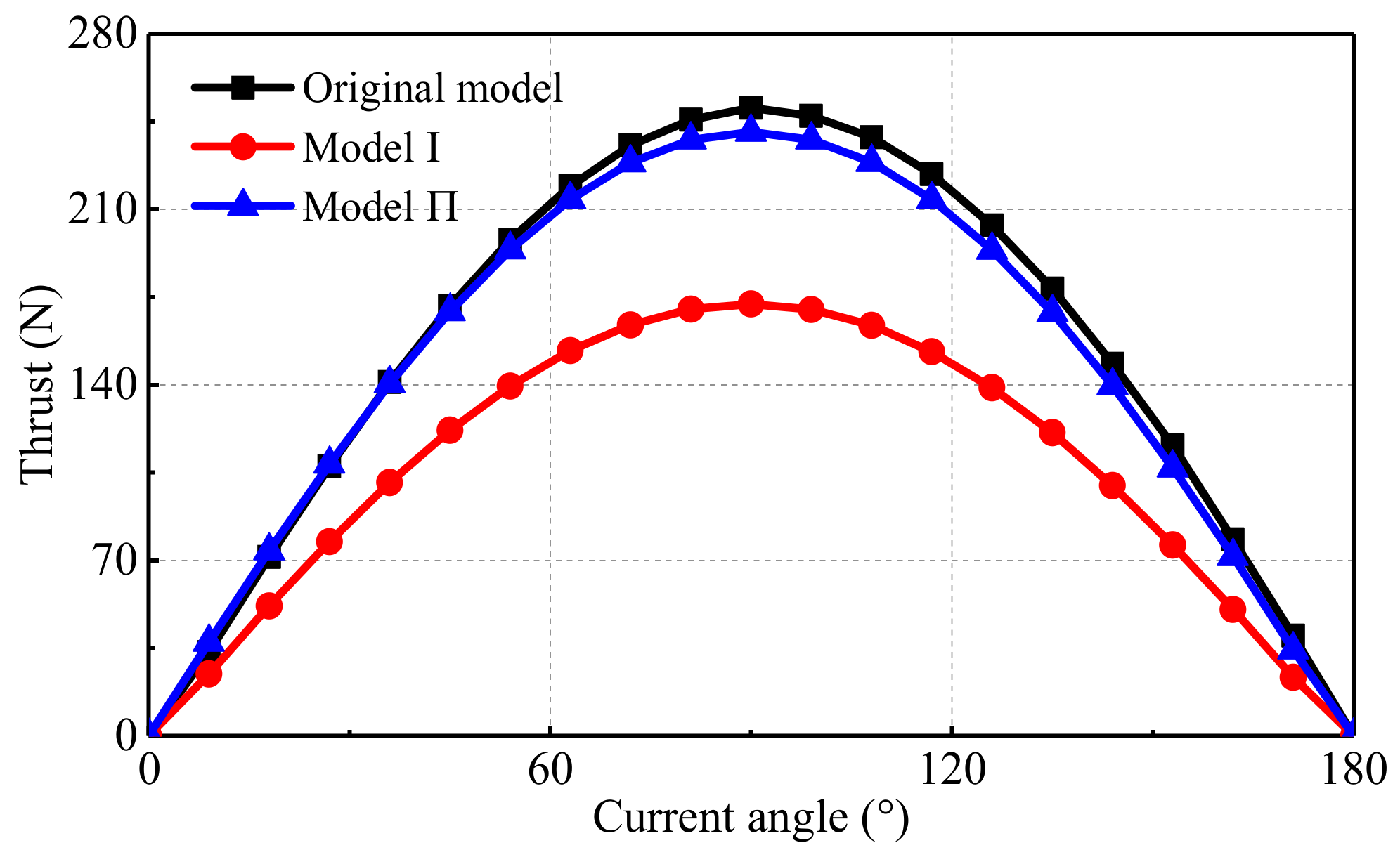
6.3. Thrust Characteristic
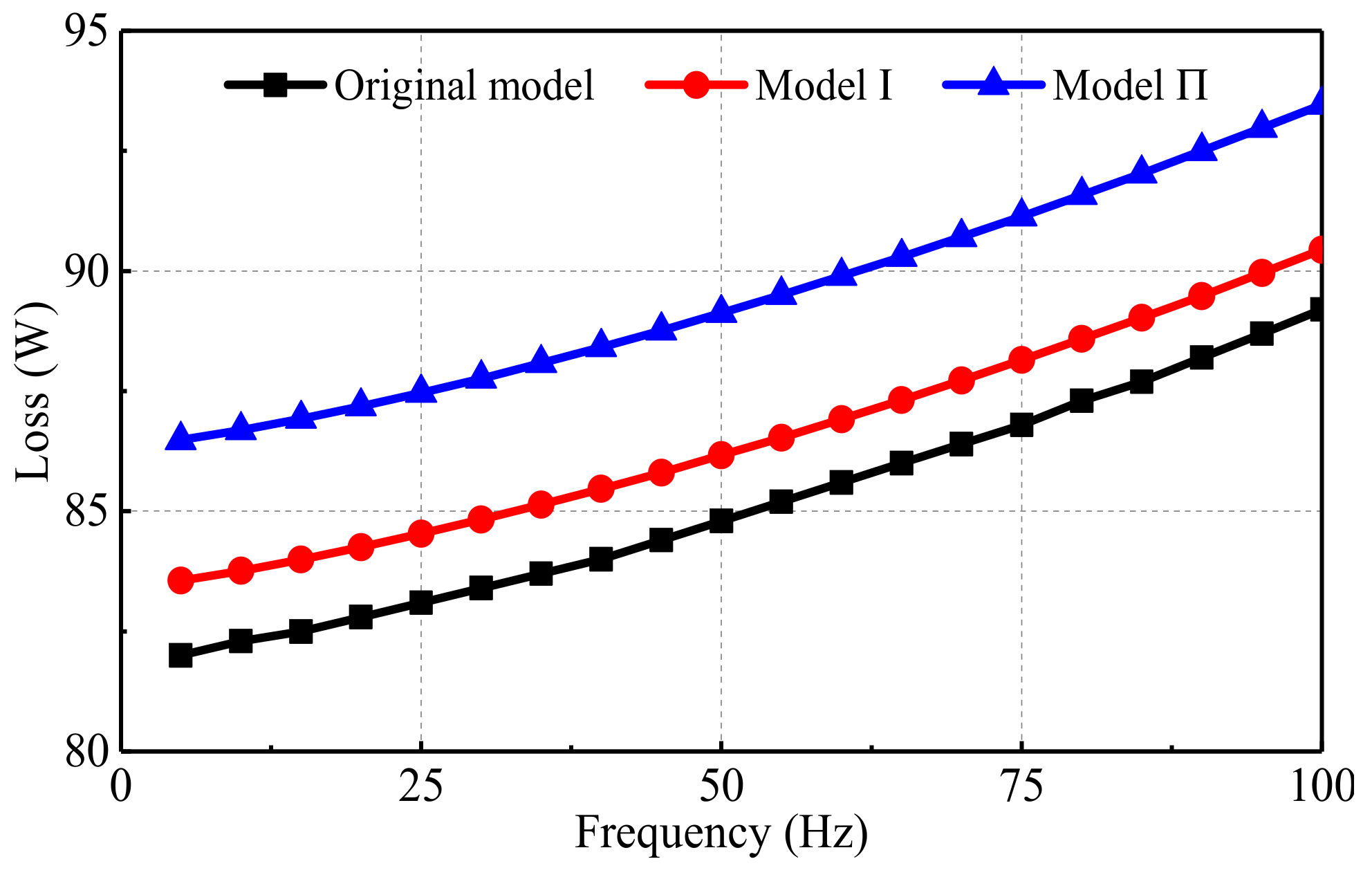
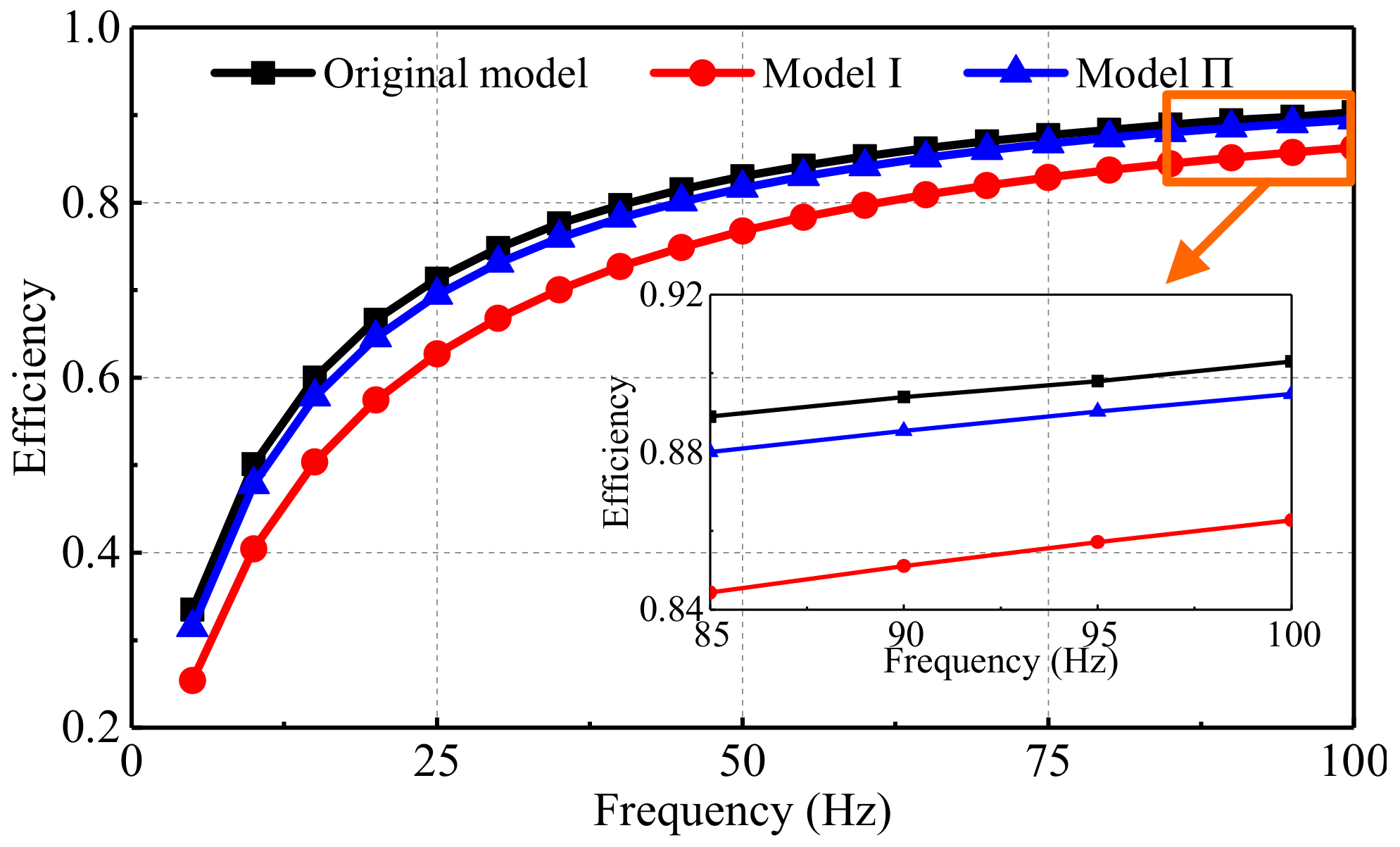
6.4. Loss and Efficient Characteristic
7. Conclusions
- (1)
- The detent force when S is 0.5 is 70.19% lower than that when the coefficient S is 0.
- (2)
- The thrust fluctuation of Model Ⅰ is reduced by 19.21% comparing with the original machine.
- (3)
- The back-EMF of Model Ⅱ is 31.86% higher than that of Model Ⅰ. Additionally, the thrust of Model Ⅱ is 39.78% higher than that of Model Ⅰ.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ji, J.H.; Xue, R.; Zhao, W.X.; Tao, T.; Huang, L.S. Simplified Three-Vector-Based Model Predictive Thrust Force Control with Cascaded Optimization Process for a Double-Side Linear Vernier Permanent Magnet Motor. IEEE Trans. Power Electron. 2020, 35, 10681–10689. [Google Scholar] [CrossRef]
- Song, J.C.; Zhao, J.W.; Dong, F.; Zhao, J.; Song, X.W. Demagnetization Fault Detection for Double-Sided Permanent Magnet Linear Motor Based on Three-Line Magnetic Signal Signature Analysis. IEEE-ASME Trans. Mech. 2020, 25, 815–827. [Google Scholar] [CrossRef]
- Zhang, Z.J.; Luo, M.Z.; Duan, J.A.; Kou, B.Q. Performance Analysis of Double-Sided Permanent Magnet Linear Synchronous Motor with Quasi-Sinusoidal Ring Windings. IEEE Trans. Energy Convers. 2020, 35, 1465–1474. [Google Scholar] [CrossRef]
- Zhao, J.; Mou, Q.S.; Zhu, C.C.; Chen, Z.; Li, J. Study on a Double-Sided Permanent-Magnet Linear Synchronous Motor with Reversed Slots. IEEE-ASME Trans. Mech. 2021, 26, 3–12. [Google Scholar] [CrossRef]
- Li, B.; Zhao, J.; Liu, X.D.; Guo, Y.G.; Hu, H.Z.; Li, J. Detent Force Reduction of an Arc-Linear Permanent-Magnet Synchronous Motor by Using Compensation Windings. IEEE Trans. Ind. Electron. 2017, 64, 3001–3011. [Google Scholar] [CrossRef]
- Zhu, Y.W.; Jin, S.M.; Chung, K.K.; Cho, Y.H. Control-Based Reduction of Detent Force for Permanent Magnet Linear Synchronous Motor. IEEE Trans. Magn. 2009, 45, 2827–2830. [Google Scholar] [CrossRef]
- Wang, M.L.; Li, L.Y.; Pan, D.H. Detent Force Compensation for PMLSM Systems Based on Structural Design and Control Method Combination. IEEE Trans. Ind. Electron. 2015, 62, 6845–6854. [Google Scholar] [CrossRef]
- Shin, J.S.; Watanabe, R.; Koseki, T.; Kim, H.J.; Takada, Y. The Design for Cogging Force Reduction of a Double-Sided Transverse Flux Permanent Magnet Linear Synchronous Motor. IEEE Trans. Magn. 2014, 50, 8205104. [Google Scholar] [CrossRef]
- Kim, T.W.; Chang, J.H. Analysis of Thrust Characteristics Considering Step-Skew and Overhang Effects in Permanent Magnet Linear Synchronous Motor. IEEE Trans. Magn. 2015, 51, 8102104. [Google Scholar]
- Ma, M.N.; Zhang, J.P.; Yu, J.K.; Zhang, H.; Jin, Y.X. Analytical Methods for Minimizing Detent Force in Long-Stator PM Linear Motor Including Longitudinal End Effects. IEEE Trans. Magn. 2015, 51, 8204104. [Google Scholar] [CrossRef]
- Zhu, Y.W.; Lee, S.G.; Chung, K.S.; Cho, Y.H. Investigation of Auxiliary Poles Design Criteria on Reduction of End Effect of Detent Force for PMLSM. IEEE Trans. Magn. 2009, 45, 2863–2866. [Google Scholar] [CrossRef]
- Inoue, M.; Sato, K. An approach to a suitable stator length for minimizing the detent force of permanent magnet linear synchronous motors. IEEE Trans. Magn. 2000, 36, 1890–1893. [Google Scholar] [CrossRef]
- Hu, H.Z.; Liu, X.D.; Zhao, J.; Guo, Y.G. Analysis and Minimization of Detent End Force in Linear Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2018, 65, 2475–2486. [Google Scholar] [CrossRef]
- Seo, S.W.; Jang, G.H.; Koo, M.M.; Choi, J.Y. Characteristic Analysis of the Influence of Auxiliary Teeth and Notching on the Reduction of the Detent Force of a Permanent Magnet Linear Synchronous Machine. IEEE Trans. Appl. Supercon. 2018, 28, 5203705. [Google Scholar] [CrossRef]
- Huang, X.Z.; Qian, Z.Y.; Tan, Q.; Li, J.; Zhou, B. Suppressing the Thrust Ripple of the Permanent Magnet Linear Synchronous Motors with Different Pole Structures by Setting the Modular Primary Structures Differently. IEEE Trans. Energy Convers. 2018, 33, 1815–1824. [Google Scholar] [CrossRef]
- Kwon, Y.S.; Kim, W.J. Detent-Force Minimization of Double-Sided Interior Permanent-Magnet Flat Linear Brushless Motor. IEEE Trans. Magn. 2016, 52, 8201609. [Google Scholar] [CrossRef]
- Kwon, Y.S.; Kim, W.J. Steady-State Modeling and Analysis of a Double-Sided Interior Permanent-Magnet Flat Linear Brushless Motor with Slot-Phase Shift and Alternate Teeth Windings. IEEE Trans. Magn. 2016, 52, 8205611. [Google Scholar] [CrossRef]
- Huang, X.Z.; Ji, T.P.; Li, L.Y.; Zhou, B.; Zhang, Z.R.; Gerada, D.; Gerada, C. Detent Force, Thrust, and Normal Force of the Short-Primary Double-Sided Permanent Magnet Linear Synchronous Motor with Slot-Shift Structure. IEEE Trans. Energy Convers. 2019, 34, 1411–1421. [Google Scholar] [CrossRef]
- Chai, X.B.; Si, J.K.; Nie, R.; Wang, Y.Q.; Qi, G.; Dong, L.H. Comparative Analysis of Double-sided Permanent Magnet Linear Synchronous Machines with 120° Phase Belt Toroidal and Concentrated Windings. In Proceedings of the 13th International symposium on Linear Drives for Industry Applications (LDIA), Wuhan, China, 1–3 July 2021. [Google Scholar]
- Baatar, N.; Yoon, H.S.; Pham, M.T.; Shin, P.S.; Koh, C.S. Shape Optimal Design of a 9-pole 10-slot PMLSM for Detent Force Reduction Using Adaptive Response Surface Method. IEEE Trans. Magn. 2009, 45, 4562–4565. [Google Scholar] [CrossRef]
- Huang, X.Z.; Yu, H.C.; Zhou, B.; Li, L.Y.; Gerada, D.; Gerada, C.; Qian, Z.Y. Detent-Force Minimization of Double-Sided Permanent Magnet Linear Synchronous Motor by Shifting One of the Primary Components. IEEE Trans. Ind. Electron. 2020, 67, 180–191. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Cappello, A.D.F. Reduction of Cogging Force in PM Linear Motor by Pole-Shifting. IEEE Proc. Electr. Power Appl. 2005, 152, 703–709. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Value |
|---|---|
| Pole pitch (mm) | 16.5 |
| Primary lamination thickness (mm) | 60 |
| Secondary-core thickness (mm) | 7 |
| Slot pitch (mm) | 11 |
| Slot width (mm) | 6 |
| Slot height (mm) | 15 |
| PM height (mm) | 3 |
| PM width (mm) | 12.4 |
| Rated power (W) | 397.17 |
| Maximum thrust (N) | 320.87 |
| Maximum velocity (m/s) | 3.3 |
| Maximum stroke (mm) | 1000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Si, J.; Chai, X.; Nie, R.; Hu, Y.; Li, Y. Detent Force Minimization of Double-Sided Permanent Magnet Linear Synchronous Machine with 120° Phase Belt Toroidal Windings by Slot-Shift Structure. Energies 2022, 15, 943. https://doi.org/10.3390/en15030943
Si J, Chai X, Nie R, Hu Y, Li Y. Detent Force Minimization of Double-Sided Permanent Magnet Linear Synchronous Machine with 120° Phase Belt Toroidal Windings by Slot-Shift Structure. Energies. 2022; 15(3):943. https://doi.org/10.3390/en15030943
Chicago/Turabian StyleSi, Jikai, Xiaobao Chai, Rui Nie, Yihua Hu, and Yingsheng Li. 2022. "Detent Force Minimization of Double-Sided Permanent Magnet Linear Synchronous Machine with 120° Phase Belt Toroidal Windings by Slot-Shift Structure" Energies 15, no. 3: 943. https://doi.org/10.3390/en15030943
APA StyleSi, J., Chai, X., Nie, R., Hu, Y., & Li, Y. (2022). Detent Force Minimization of Double-Sided Permanent Magnet Linear Synchronous Machine with 120° Phase Belt Toroidal Windings by Slot-Shift Structure. Energies, 15(3), 943. https://doi.org/10.3390/en15030943