
Fault-Tolerant Fuzzy Logic Control of a 6-Phase Axial Flux Permanent-Magnet Synchronous Generator


Abstract
:1. Introduction
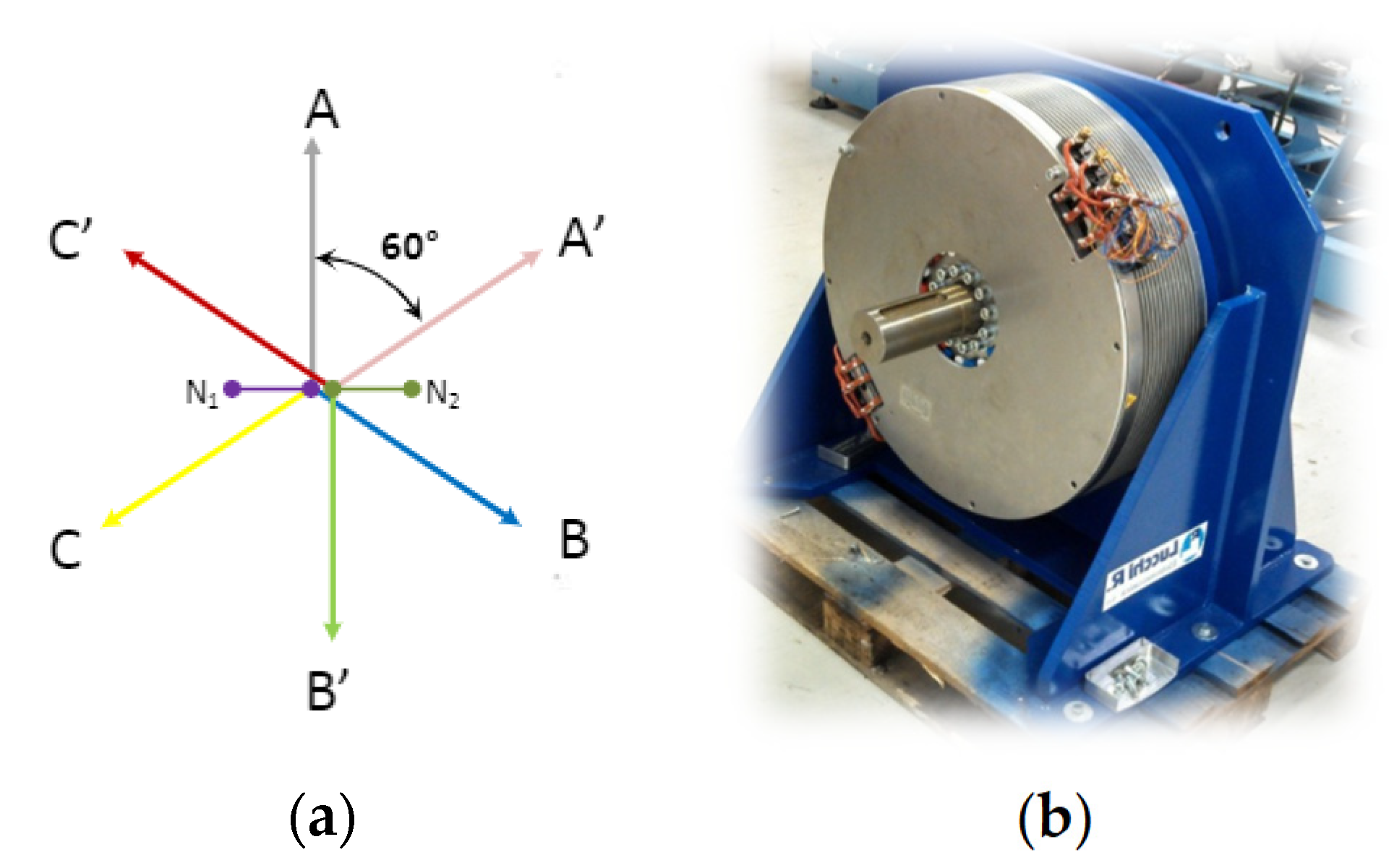
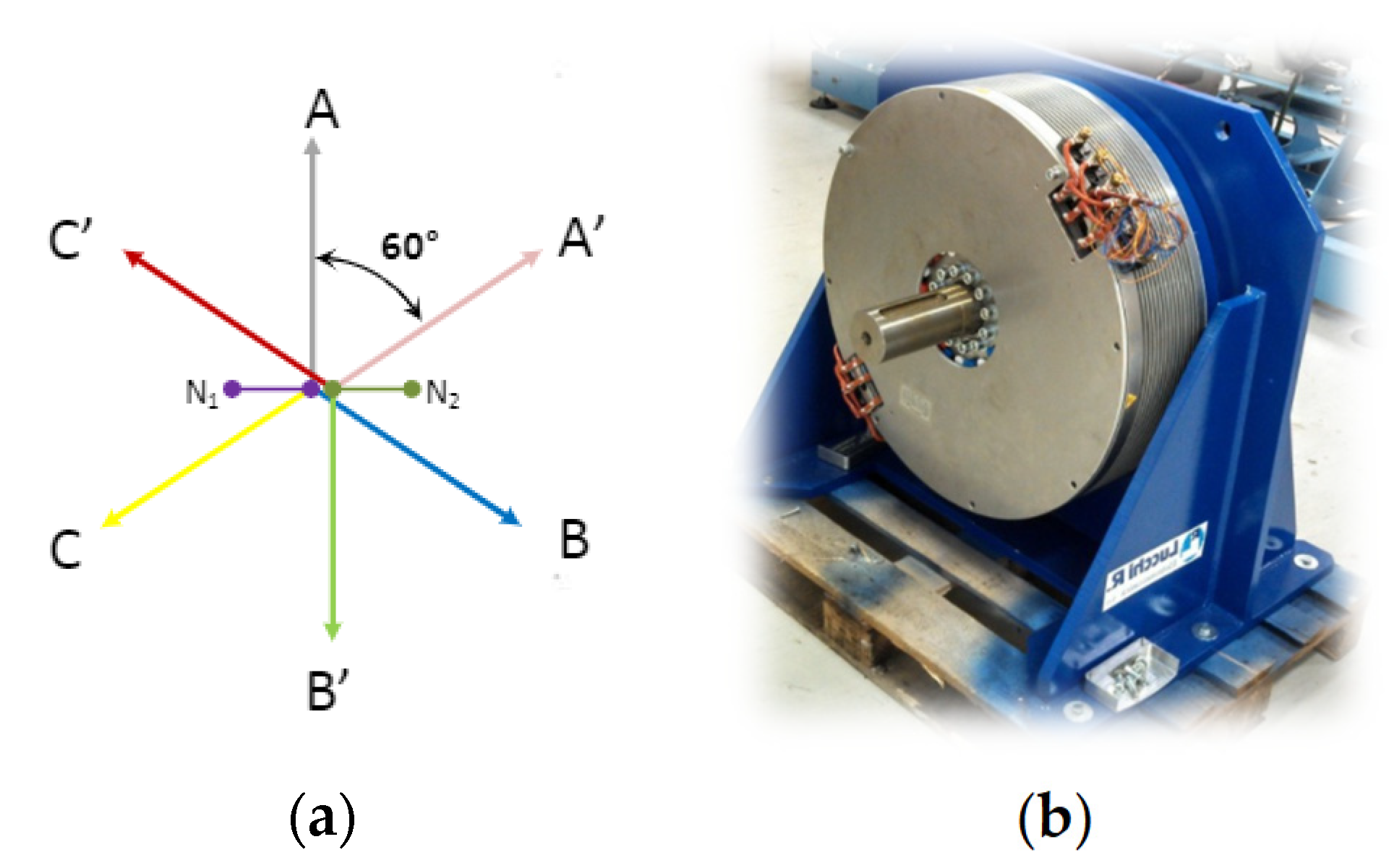
2. Topology and Model of 6P-AFPMSM
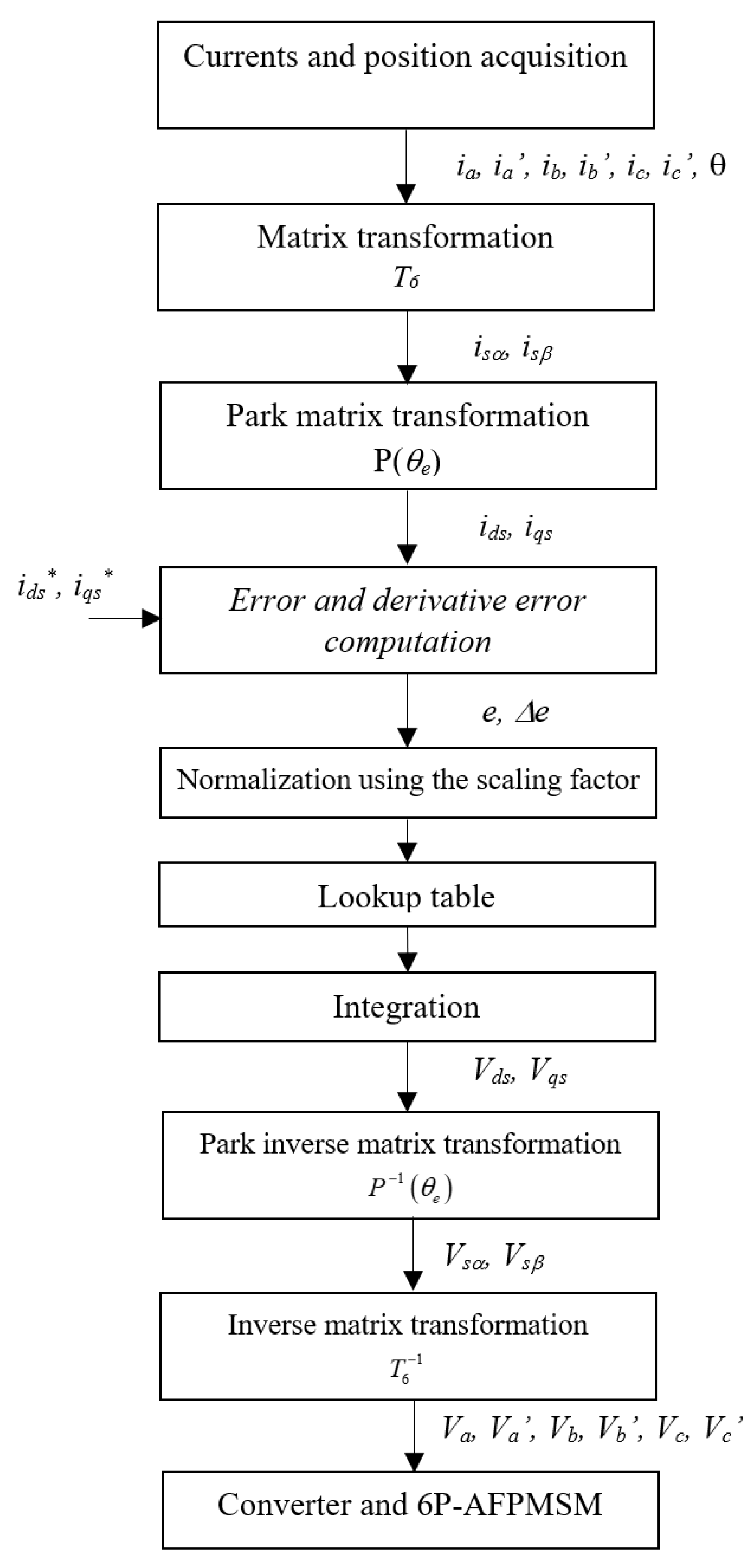
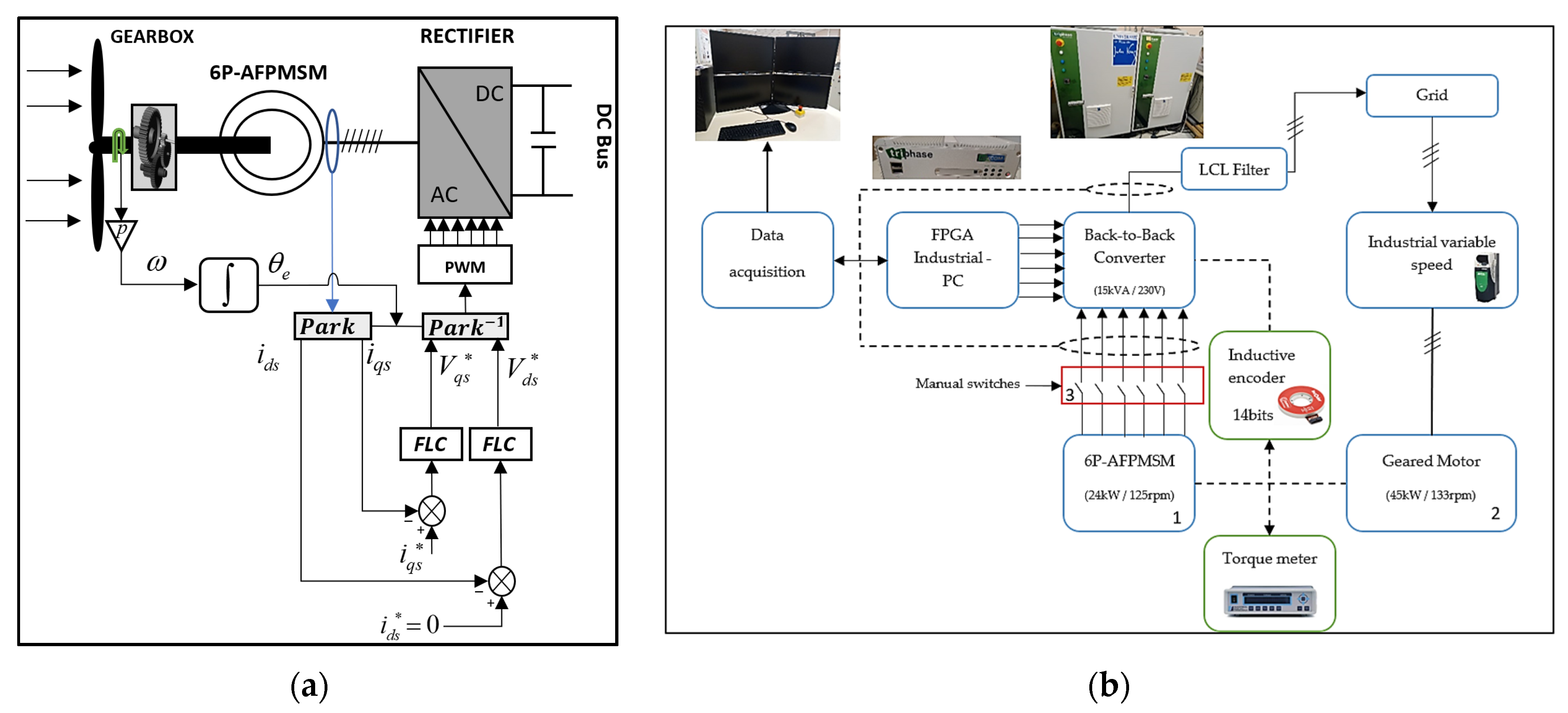
2.1. Field Oriented Control
- are the stator terminal voltages to neutral voltage ;
- are the stator phase currents ;
- are the stator phase winding resistances with ;
- are the stator winding fluxes linkages ;
- are the permanent magnet fluxes ;
- are the stator inductance windings:where , and are the self-inductance of the stator windings, and the others represent the mutual inductances of the stator windings.
2.2. dq Model of 6P-AFPMS
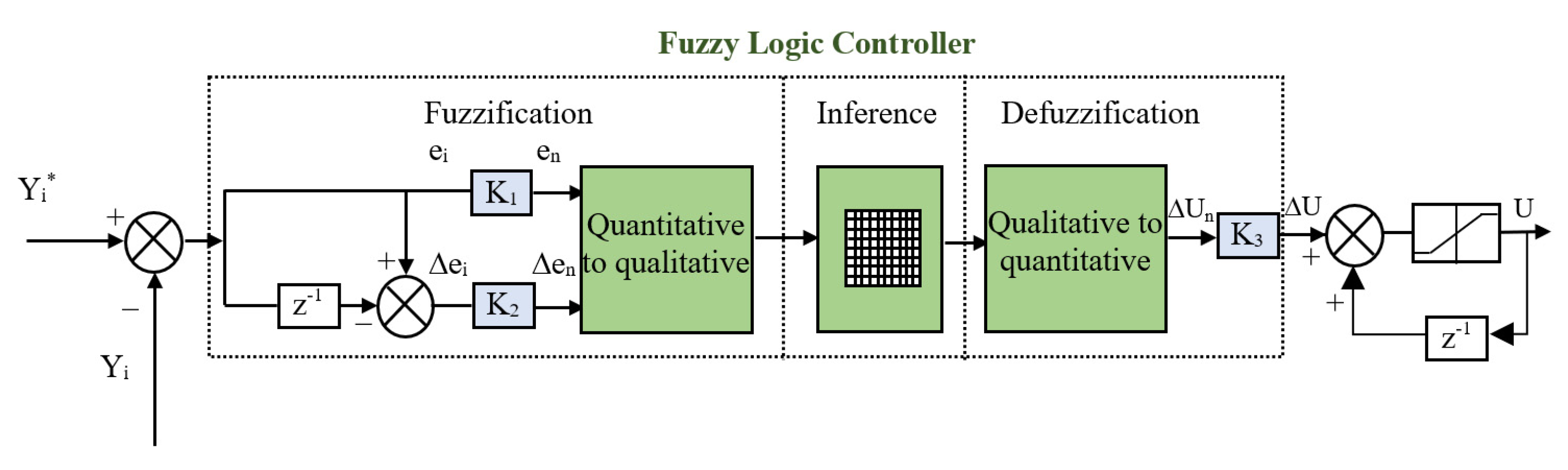
3. Fuzzy Logic Controller for AFPM Machine
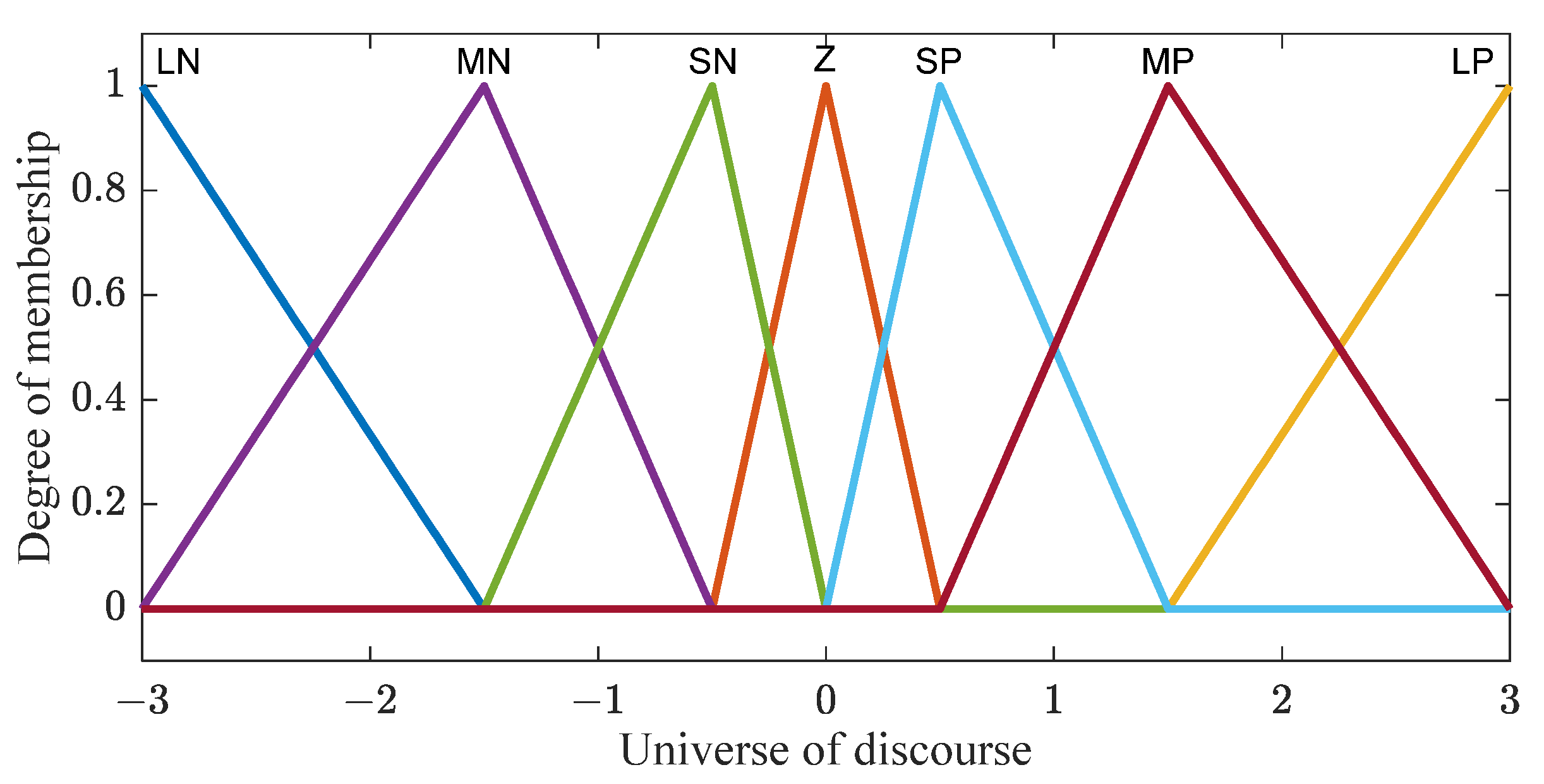
3.1. The Fuzzification of Input Variables
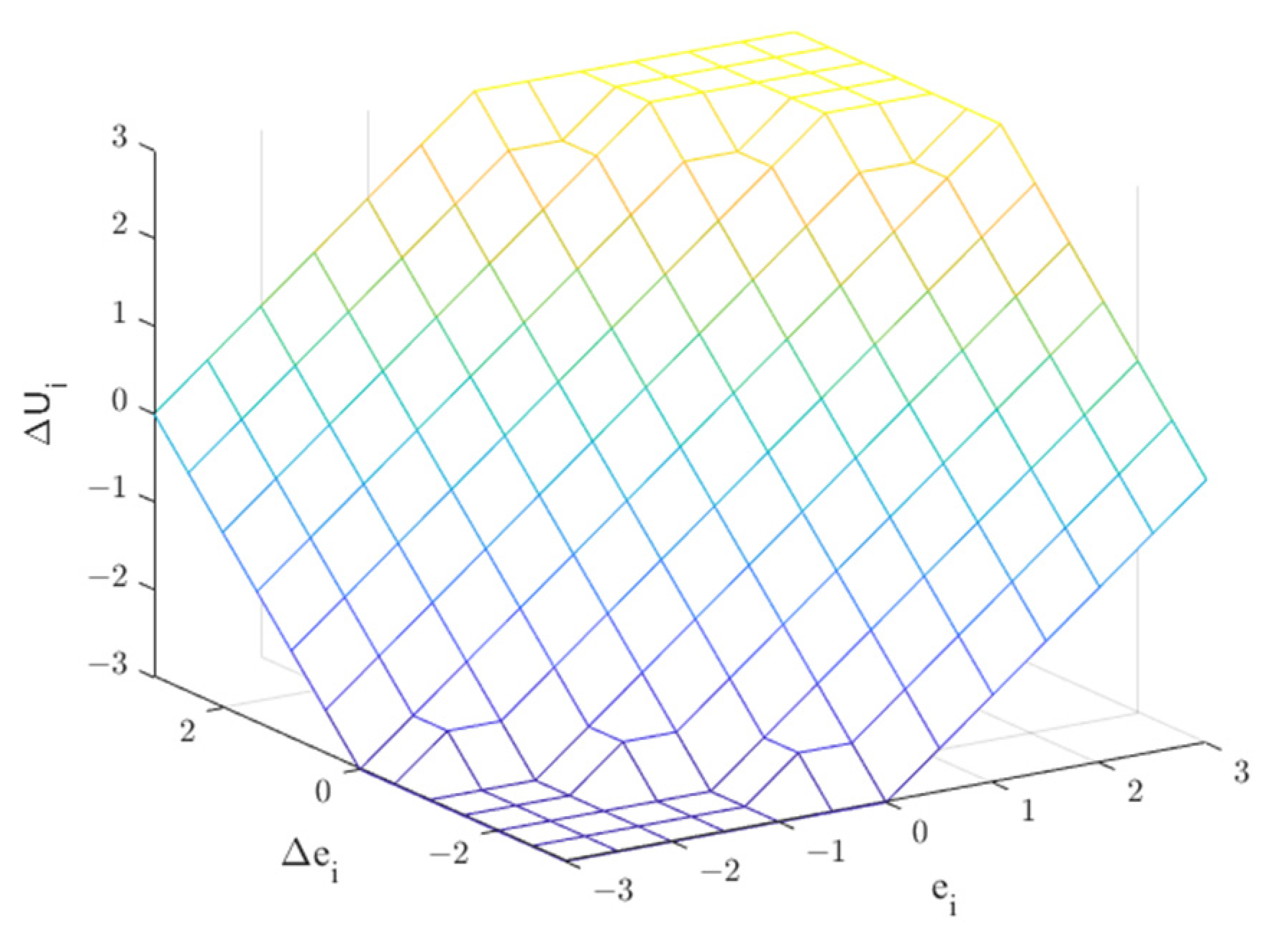
3.2. Inference Engine from a Knowledge Base
3.3. Defuzzification
4. Experimental Results under Healthy and Faulty Conditions
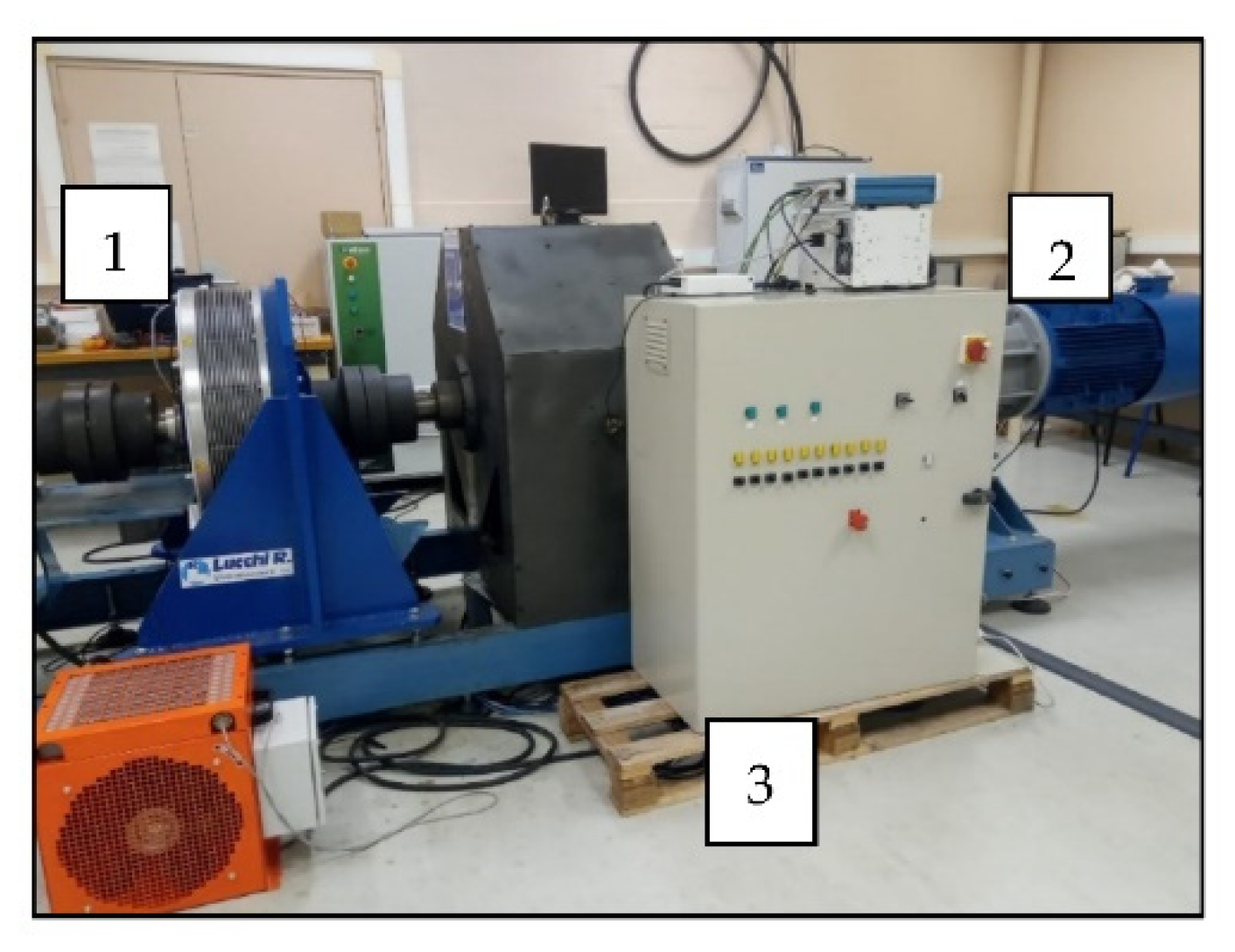
4.1. Test Bed Presentation
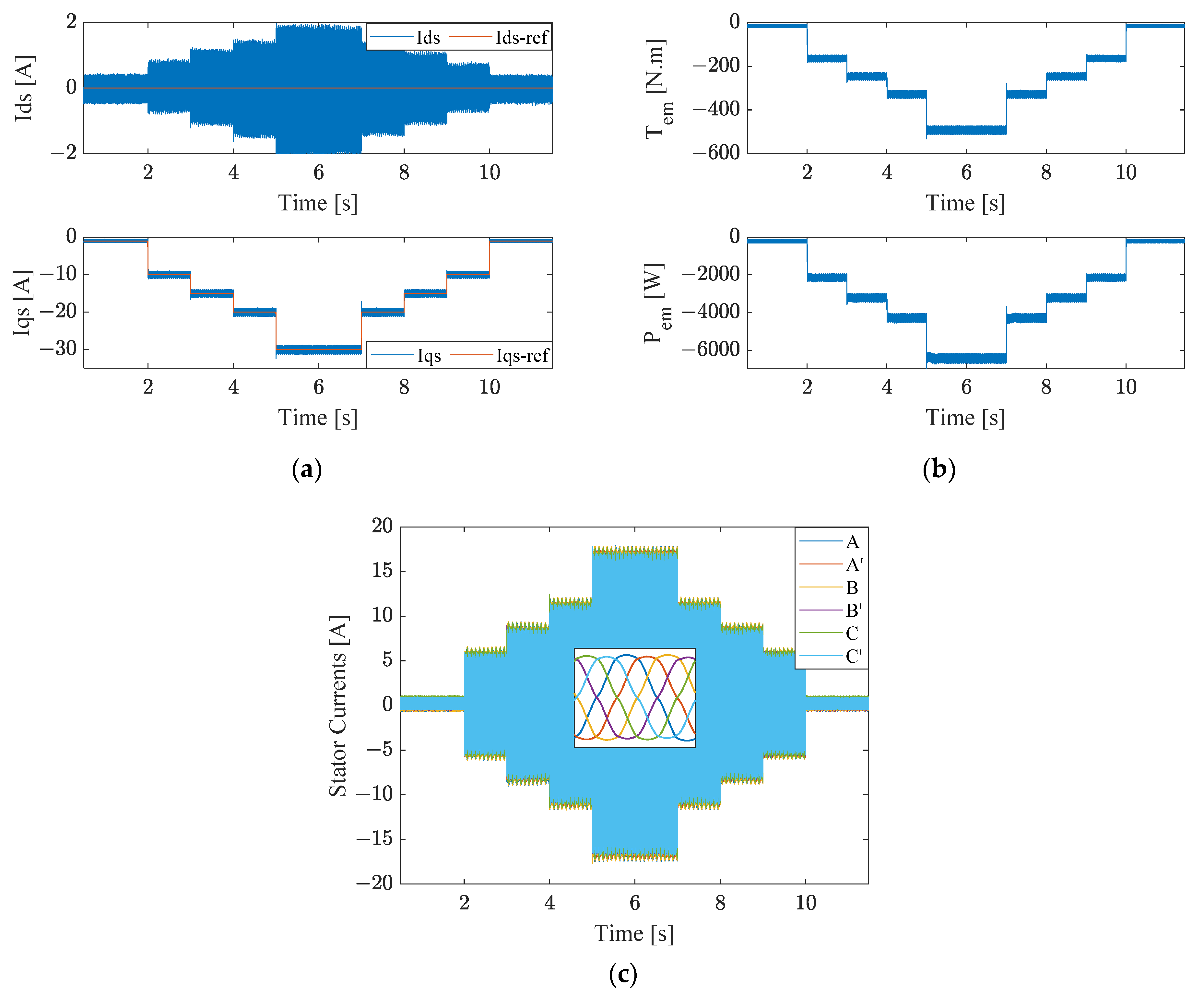
4.2. Healthy Mode Operation
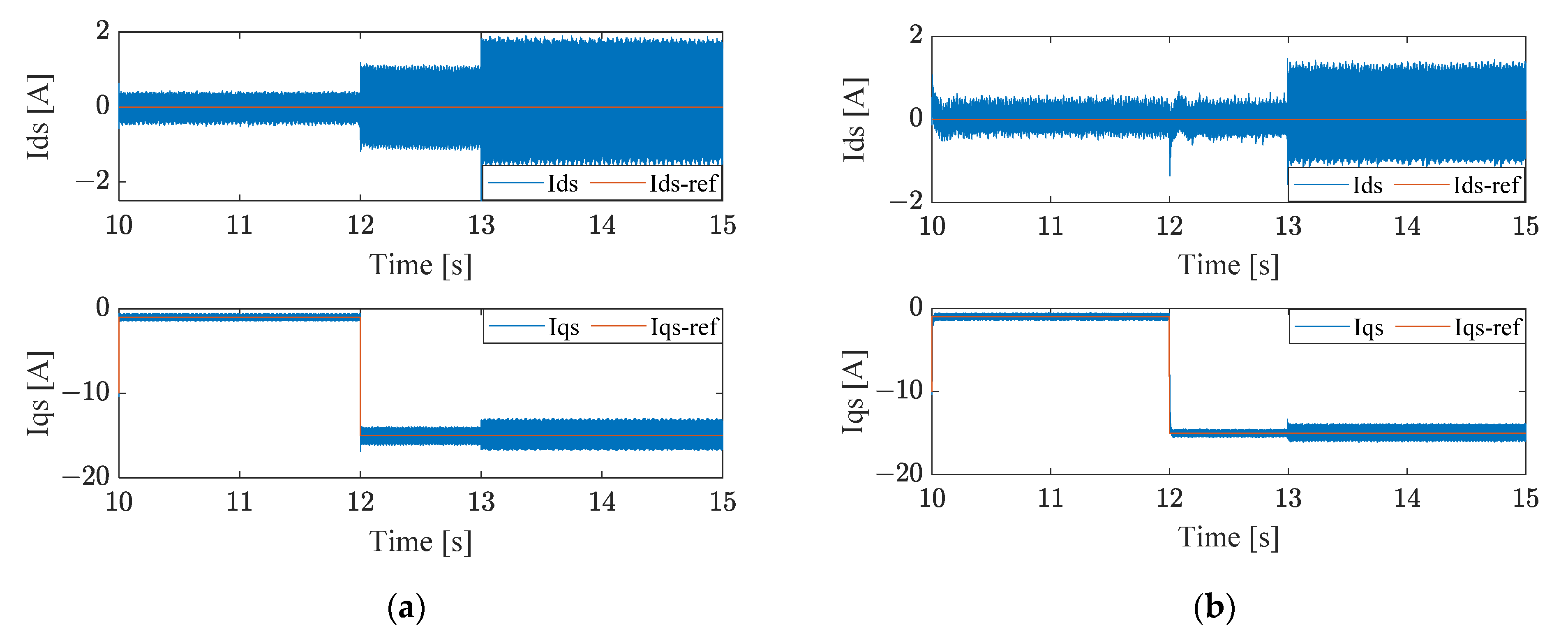
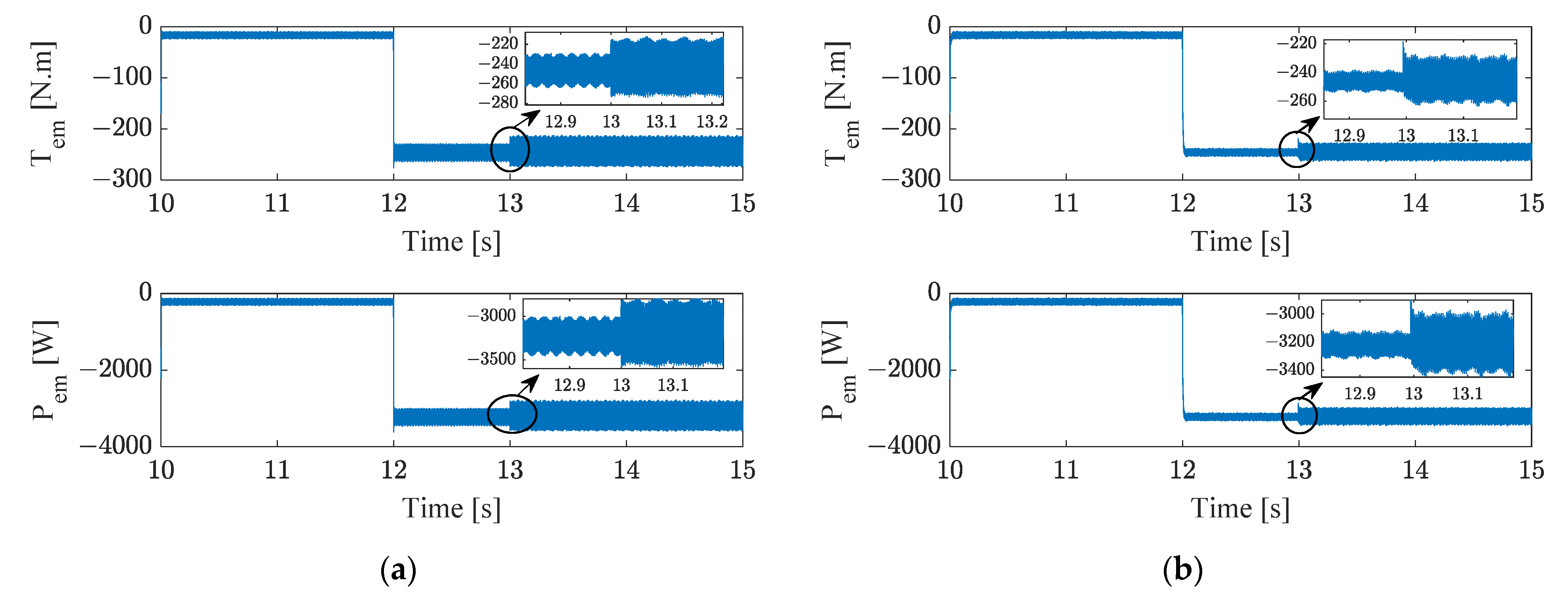
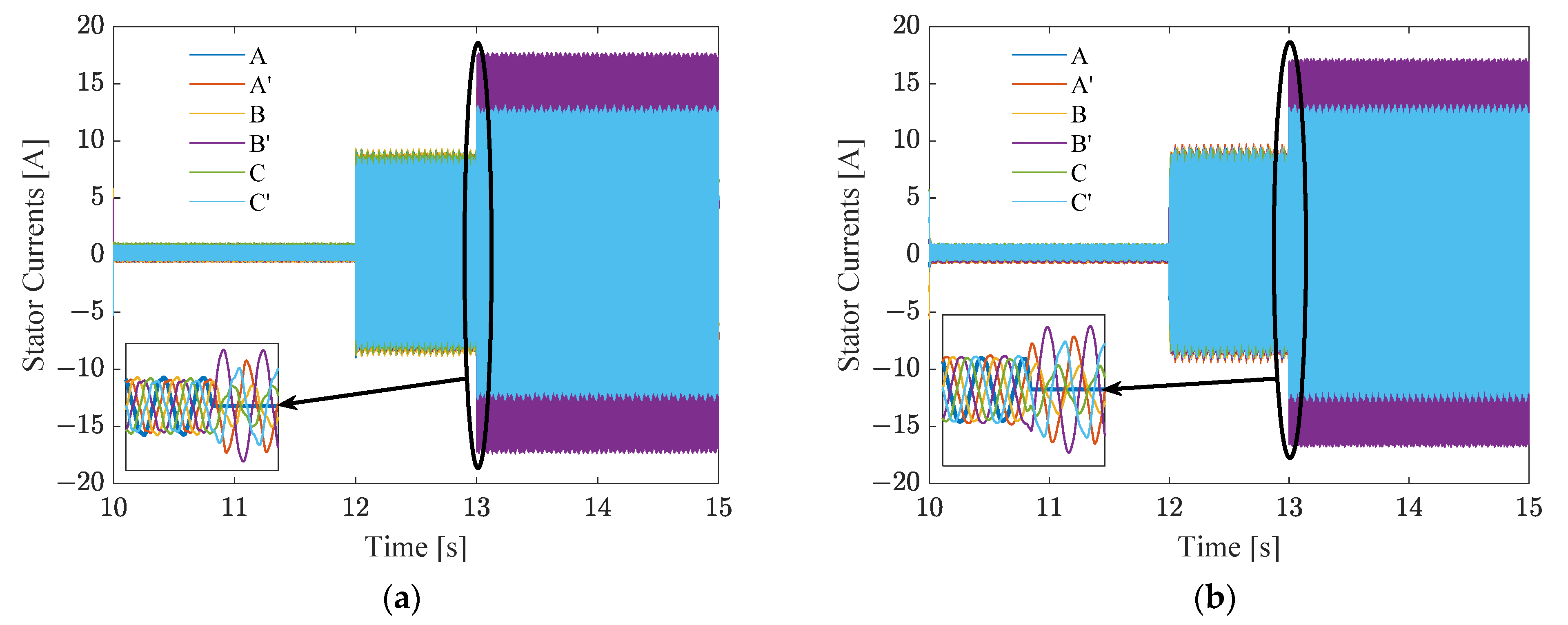
4.3. Faulty Mode Operation with One Open-Phase
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| Rated Power | 24 | kW |
| Rated Torque | 1800 | Nm |
| Rated Voltage | 160 | V |
| Rated Current | 47 | A |
| Frequency | 33 | Hz |
| Number of pole pairs | 16 | - |
| Stator resistance Rs | 0.139 | Ω |
| d-axis inductance Lds | 0.0026 | H |
| q-axis inductance Lqs | 0.0026 | H |
| Nominal speed | 125 | rpm |
| RMS Back EMF constant | 0.72 | V/rad/s |
Appendix B
Appendix C
| Parameter | Value | Units |
|---|---|---|
| 0.707 | - | |
| 1000 | rad/s | |
| Ki(dq) | 2600 | - |
| Kp(dq) | 3.54 | - |
Appendix D

References
- Global Wind Report 2021. Available online: https://gwec.net/global-wind-report-2021/ (accessed on 9 September 2021).
- Pantea, A.; Yazidi, A.; Betin, F.; Capolino, G.A.; Lanfranchi, V. Six-phase Axial Flux Permanent Magnet generator model: Simulation and experimental validation. In Proceedings of the 2016 IEEE 25th International Symposium on Industrial Electronics (ISIE), Santa Clara, CA, USA, 8–10 June 2016; pp. 192–197. [Google Scholar] [CrossRef]
- Anvari, B.; Guedes-Pinto, P.; Lee, R. Dual Rotor Axial Flux Permanent Magnet Motor using PCB Stator. In Proceedings of the 2021 IEEE International Electric Machines & Drives Conference (IEMDC), Hartford, CT, USA, 17–20 May 2021; pp. 1–7. [Google Scholar]
- Radwan-Pragłowska, N.; Węgiel, T.; Borkowski, D. Modeling of Axial Flux Permanent Magnet Generators. Energies 2020, 13, 5741. [Google Scholar] [CrossRef]
- Flah, A.; Khan, I.A.; Agarwal, A.; Sbita, L.; Simoes, M.G. Field-oriented control strategy for double-stator single-rotor and double-rotor single-stator permanent magnet machine: Design and operation. Comput. Electr. Eng. 2021, 90, 106953. [Google Scholar] [CrossRef]
- Zhao, J.; Zheng, L.; Wang, S.; Hua, M. Research on Deadbeat Current Prediction Vector Control System of Axial Flux Permanent Magnet Synchronous Motor for Electric Bus Based on Efficiency Optimal Torque Distribution Method. IEEE Access 2019, 7, 128384–128393. [Google Scholar] [CrossRef]
- Pirzad, S.; Ghadimi, A.A.; Abolmasoumi, A.H.; Jabbari, A.; Bagheri, S. Optimal mixed control of Axial Flux Permanent Magnet Synchronous generator wind turbines with modular stator structure. ISA Trans. 2021, 115, 153–162. [Google Scholar] [CrossRef] [PubMed]
- Bouyahia, O.; Betin, F.; Yazidi, A. Fault-tolerant Variable Structure Control Of a Low Speed 6-Phase Induction Generator. In Proceedings of the 2021 IEEE 13th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Dallas, TX, USA, 22–25 August 2021; Volume 1, pp. 92–98. [Google Scholar] [CrossRef]
- Che, H.S.; Hew, W.P. Dual three-phase operation of single neutral symmetrical six-phase machine for improved performance. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 001176–001181. [Google Scholar] [CrossRef]
- Liu, Z.; Zheng, Z.; Xu, L.; Wang, K.; Li, Y. Current Balance Control for Symmetrical Multiphase Inverters. IEEE Trans. Power Electron. 2016, 31, 4005–4012. [Google Scholar] [CrossRef]
- Mule, G.J.A.; Munim, W.N.W.A.; Tousizadeh, M.; Abidin, A.F. Post-fault tolerant of symmetrical six-phase induction machine under open circuit fault with single and two isolated neutral points using graphical user interface. AIP Conf. Proc. 2019, 2173, 020016. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, A.; Gonzalez-Prieto, I.; Yepes, A.G.; Duran, M.J. Symmetrical Six-Phase Induction Machines: A Solution for Multiphase Direct Control Strategies. In Proceedings of the 2021 22nd IEEE International Conference on Industrial Technology (ICIT), Valencia, Spain, 10–12 March 2021; p. 6. [Google Scholar]
- Liang, Z.; Liang, D.; Kou, P.; Jia, S. Postfault control and harmonic current suppression for a symmetrical dual three-phase SPMSM drive under single-phase open-circuit fault. IEEE Access 2020, 8, 67674–67686. [Google Scholar] [CrossRef]
- Cervone, A.; Slunjski, M.; Levi, E.; Brando, G. Optimal Third-Harmonic Current Injection for Asymmetrical Multiphase Permanent Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2021, 68, 2772–2783. [Google Scholar] [CrossRef] [Green Version]
- Slunjski, M.; Dordevic, O.; Jones, M.; Levi, E. Symmetrical/asymmetrical winding reconfiguration in multiphase machines. IEEE Access 2020, 8, 12835–12844. [Google Scholar] [CrossRef]
- Xu, J.; Odavic, M.; Zhu, Z.Q.; Wu, Z.; Freire, N.M.A. A Generalized Decomposition Model of Dual Three-Phase Permanent Magnet Synchronous Machines Considering Asymmetric Impedances and Compensation Capability. IEEE Trans. Ind. Appl. 2021, 57, 3763–3775. [Google Scholar] [CrossRef]
- Li, W.; Feng, G.; Li, Z.; Tjong, J.; Kar, N. MultiReference Frame Based OpenPhase Fault Modeling and Control for Asymmetrical SixPhase Interior Permanent Magnet Motors. IEEE Trans. Power Electron. 2021, 36, 11712–11725. [Google Scholar] [CrossRef]
- Kali, Y.; Saad, M.; Rodas, J.; Mougharbel, I.; Benjelloun, K. Robust control of a 6-phase induction generator for variable speed wind energy conversion system. In Proceedings of the 2020 5th International Conference on Renewable Energies for Developing Countries (REDEC), Marrakech, Morocco, 29–30 June 2020; pp. 1–6. [Google Scholar]
- Pantea, A.; Bouyahia, O.; Abdallah, A.; Yazidi, A.; Betin, F. Fault Tolerant Fuzzy Logic Control of a 6-Phase Induction Generator for Wind Turbine Energy Production. Electr. Power Compon. Syst. 2021, 1–11. [Google Scholar] [CrossRef]
- Pantea, A.; Nurwati, T.; Yazidi, A.; Betin, F.; Carriere, S.; Capolino, G. Fuzzy Logic Control of a Low Speed Six-Phase Induction Generator for Wind Turbines. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5813–5818. [Google Scholar] [CrossRef]
- Corinthios, M. Signals, Systems, Transforms, and Digital Signal Processing with MATLAB (Chapter 5: System Modeling, Time and Frequency Response); CRC Press: Boca Raton, FL, USA, 2018; ISBN 1-4200-9049-6. [Google Scholar]
- Huang, S.; Aydin, M.; Lipo, T.A. TORUS concept machines: Pre-prototyping design assessment for two major topologies. In Proceedings of the Conference Record of the 2001 IEEE Industry Applications Conference. 36th IAS Annual Meeting (Cat. No.01CH37248), Chicago, IL, USA, 30 September–4 October 2001; Volume 3, pp. 1619–1625. [Google Scholar] [CrossRef]
- Kahourzade, S.; Mahmoudi, A.; Ping, H.W.; Uddin, M.N. A comprehensive review of axial-flux permanent-magnet machines. Can. J. Electr. Comput. Eng. 2014, 37, 19–33. [Google Scholar] [CrossRef]
- Capponi, F.G.; De Donato, G.; Caricchi, F. Recent advances in axial-flux permanent-magnet machine technology. IEEE Trans. Ind. Appl. 2012, 48, 2190–2205. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid. IEEE Trans. Energy Convers. 2006, 21, 130–135. [Google Scholar] [CrossRef] [Green Version]
- Levi, E. Multiphase AC Machines. In The Industrial Electronics Handbook; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar] [CrossRef]
- Klir, G.J.; Yuan, B. Fuzzy Sets, Fuzzy Logic, and Fuzzy Systems: Selected Papers by Lotfi A Zadeh; World Scientific: Singapore, 1996; Volume 6, ISBN 981-4499-81-1. [Google Scholar]
- Betin, F.; Pinchon, D.; Capolino, G.-A. Fuzzy logic applied to speed control of a stepping motor drive. IEEE Trans. Ind. Electron. 2000, 47, 610–622. [Google Scholar] [CrossRef]
- Fnaiech, M.A.; Betin, F.; Capolino, G.-A.; Fnaiech, F. Fuzzy logic and sliding-mode controls applied to six-phase induction machine with open phases. IEEE Trans. Ind. Electron. 2009, 57, 354–364. [Google Scholar] [CrossRef]
- Goguen, J.A.; Zadeh, L.A. Fuzzy sets. Information and control. J. Symb. Log. 1973, 38, 656–657. [Google Scholar] [CrossRef]

| e\Δe | LN | MN | SN | ZE | SP | MP | LP |
|---|---|---|---|---|---|---|---|
| LP | ZE | SP | MP | LP | LP | LP | LP |
| MP | SN | ZE | SP | MP | LP | LP | LP |
| SP | MN | SN | ZE | SP | MP | LP | LP |
| ZE | LN | MN | SN | ZE | SP | MP | LP |
| SN | LN | LN | MN | SN | ZE | SP | MP |
| MN | LN | LN | LN | MN | SN | ZE | SP |
| LN | LN | LN | LN | LN | MN | SN | ZE |
| Approach | MSE(ids) | MSE(ids) |
|---|---|---|
| Times (s) | 12–13 | 13–15 |
| PI Controller | 0.4425 | 0.8023 |
| Fuzzy Logic Controller | 0.0570 | 0.3194 |
| Approach | MSE(iqs) | MSE(iqs) |
|---|---|---|
| Times (s) | 12–13 | 13–15 |
| PI Controller | 0.3991 | 0.7938 |
| Fuzzy Logic Controller | 0.1996 | 0.4296 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bouyahia, O.; Betin, F.; Yazidi, A. Fault-Tolerant Fuzzy Logic Control of a 6-Phase Axial Flux Permanent-Magnet Synchronous Generator. Energies 2022, 15, 1301. https://doi.org/10.3390/en15041301
Bouyahia O, Betin F, Yazidi A. Fault-Tolerant Fuzzy Logic Control of a 6-Phase Axial Flux Permanent-Magnet Synchronous Generator. Energies. 2022; 15(4):1301. https://doi.org/10.3390/en15041301
Chicago/Turabian StyleBouyahia, Omar, Franck Betin, and Amine Yazidi. 2022. "Fault-Tolerant Fuzzy Logic Control of a 6-Phase Axial Flux Permanent-Magnet Synchronous Generator" Energies 15, no. 4: 1301. https://doi.org/10.3390/en15041301