
Implementation of the Improved Active Frequency Drift Anti-Islanding Method into the Three-Phase AC/DC Converter with the LCL Grid Filter


Abstract
:1. Introduction
- Opening of the power switch as a result of faults in the power grid.
- Accidental opening of the power switch during regular power grid operation.
- A deliberate shutdown of the power grid to service the power infrastructure.
- As a result of human error.
- As a result of the action of the forces of nature.
- The presence of a severe threat to health and/or the life of power line workers.
- Damage to load inside the island area.
- Damage to power grid equipment and infrastructure as a result of insufficient short-circuit power of the energy source.
- Damage to the converter coupling the RES with the power grid.
Qload = 3(U2GridRMS/(2πfL) − U2GridRMS 2πfC)
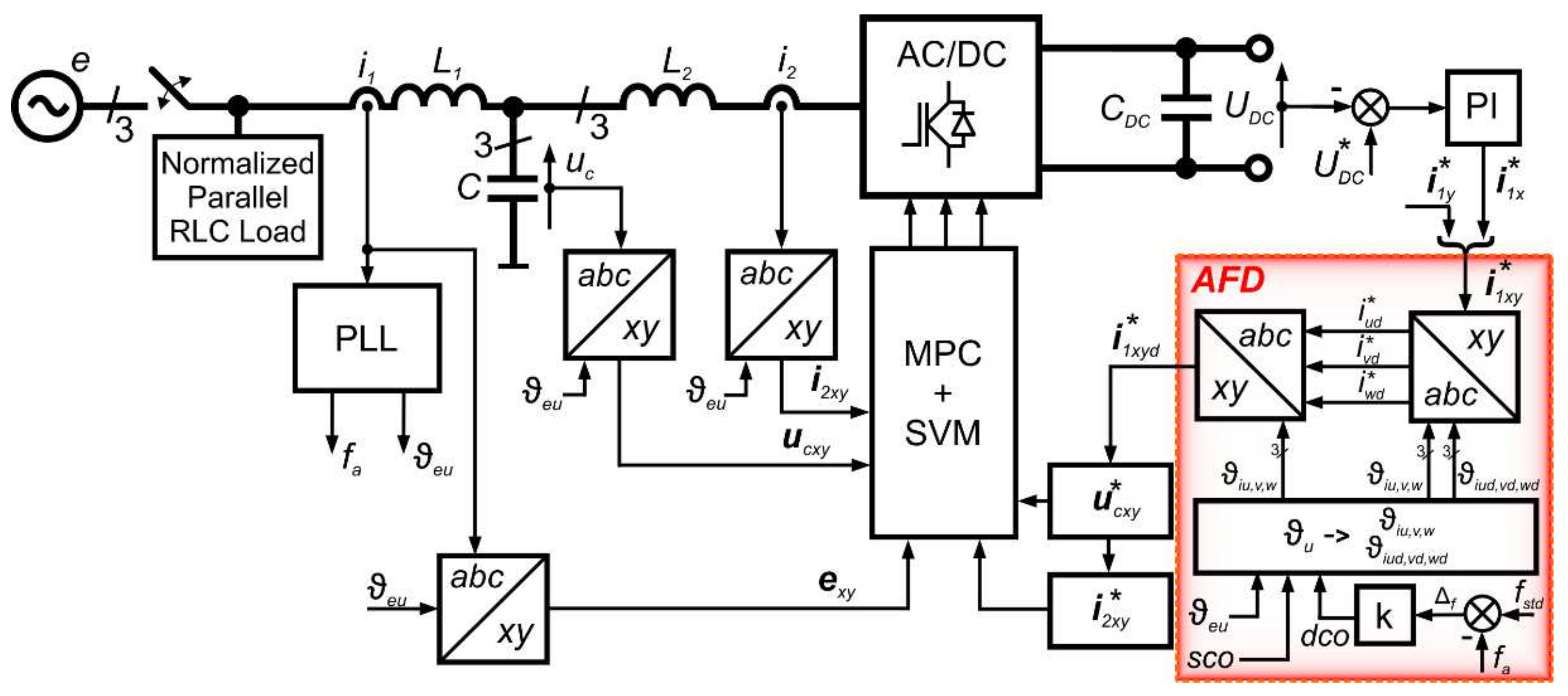
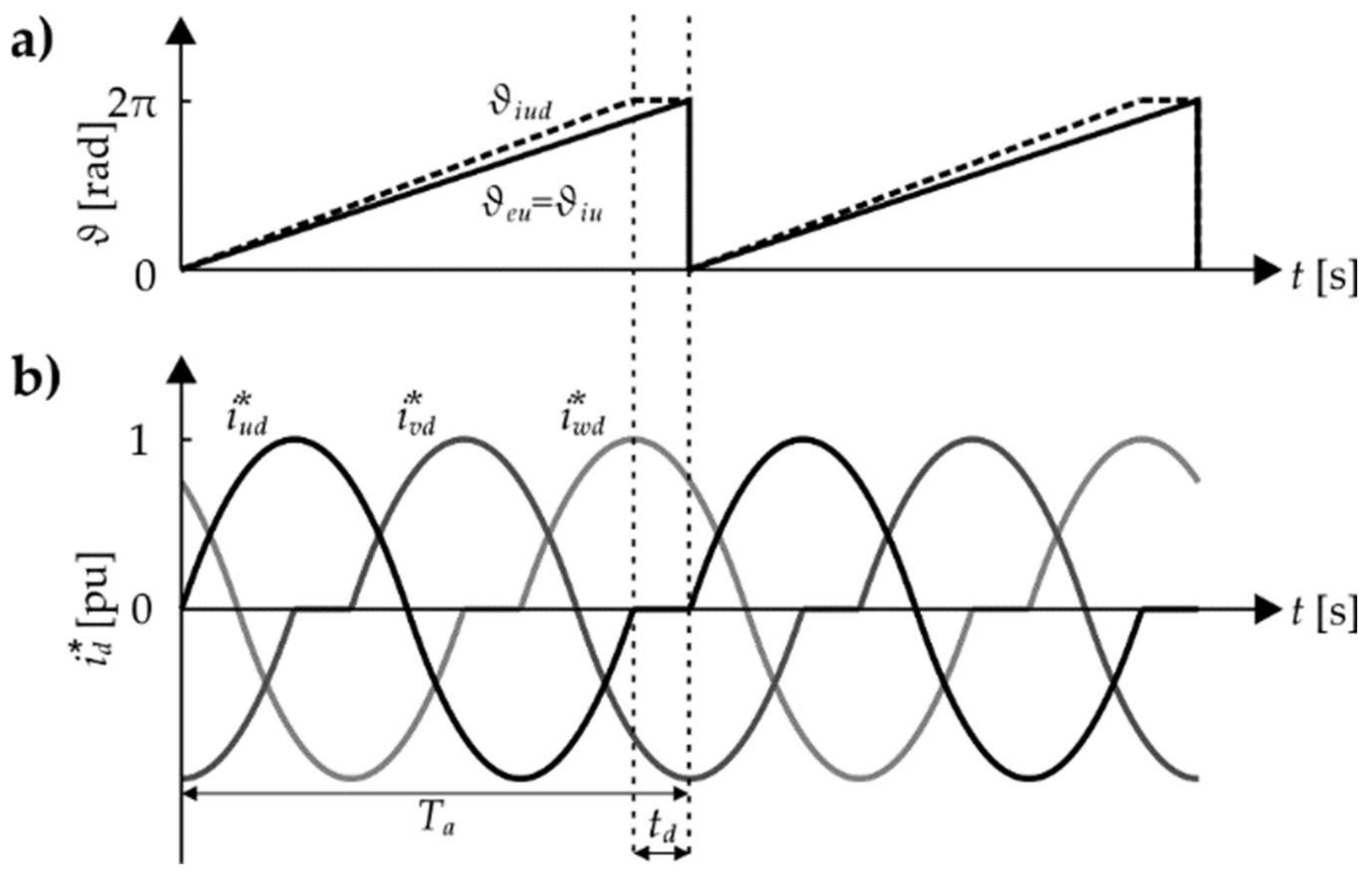
2. Description of Three-Phase Standard AFD Method
ϑiv(t) = ϑeu(t) − 2π/3
ϑiw(t) = ϑeu(t) + 2π/3
ϑiud(t) = ϑiud(t − Ts) + 2πfaccTs for ϑiu(t) <= 2π
ivd*(t) = i1x*∙sin(ϑivd(t)) + i1y*∙cos(ϑivd(t))
iwd*(t) = i1x*∙sin(ϑiud(t)) + i1y*∙cos(ϑiud(t))
i1yd* = 2/3(iud*∙cos(ϑiu) + ivd*∙cos(ϑiv) + iwd*∙cos(ϑiw))
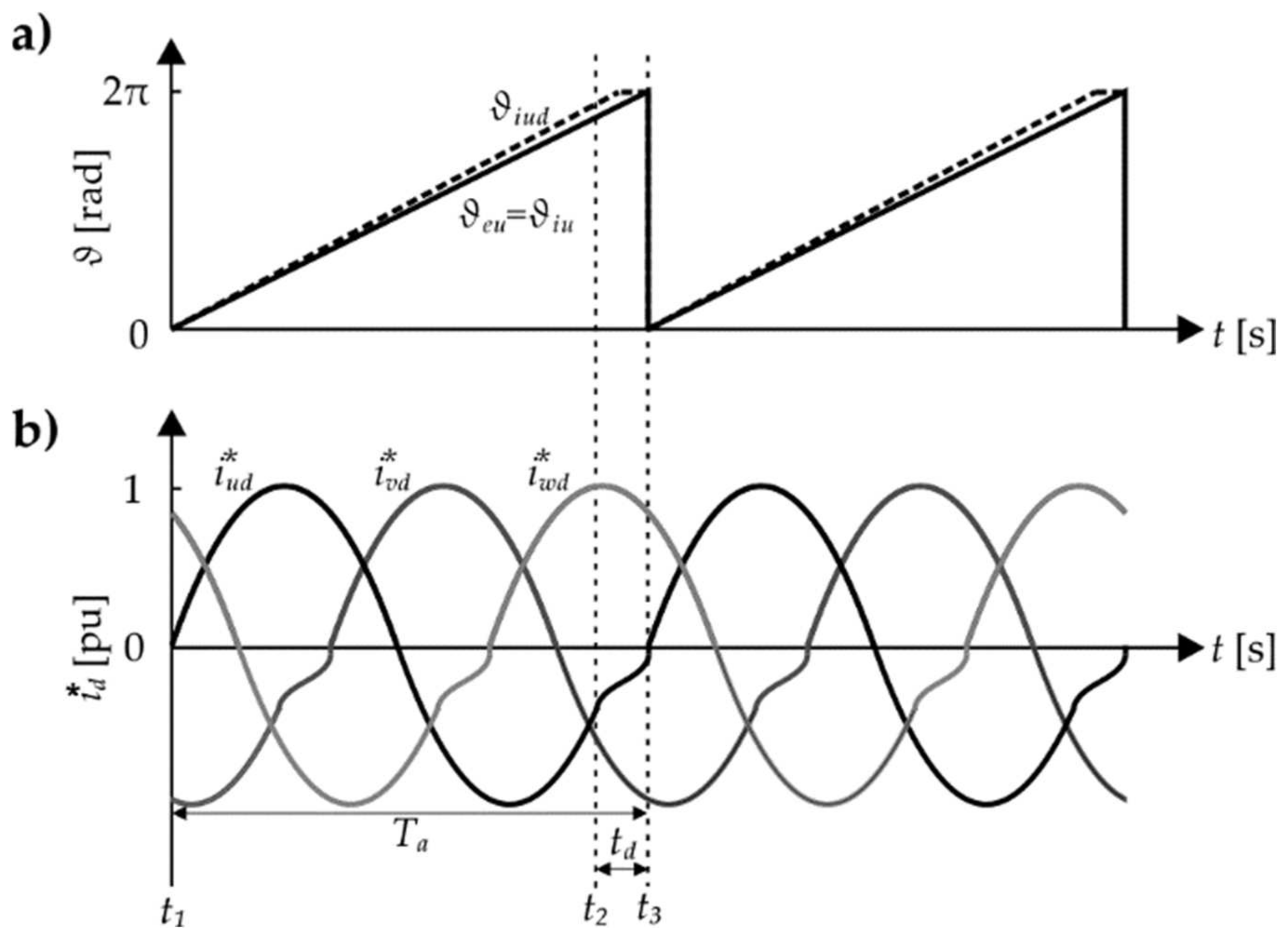
3. Description of the Proposed Method
iud*(t) = m∙(sinh(−x + xstep(t)))/2 + sinh(−x)/2 for t2 < t < t3
xstep(t) = 0 for t1 <= t <= t2
xstep(t) = xstep(t − Ts) + 2x/n for t2 < t < t3
4. Simulation and Experimental Verification
5. Discussion
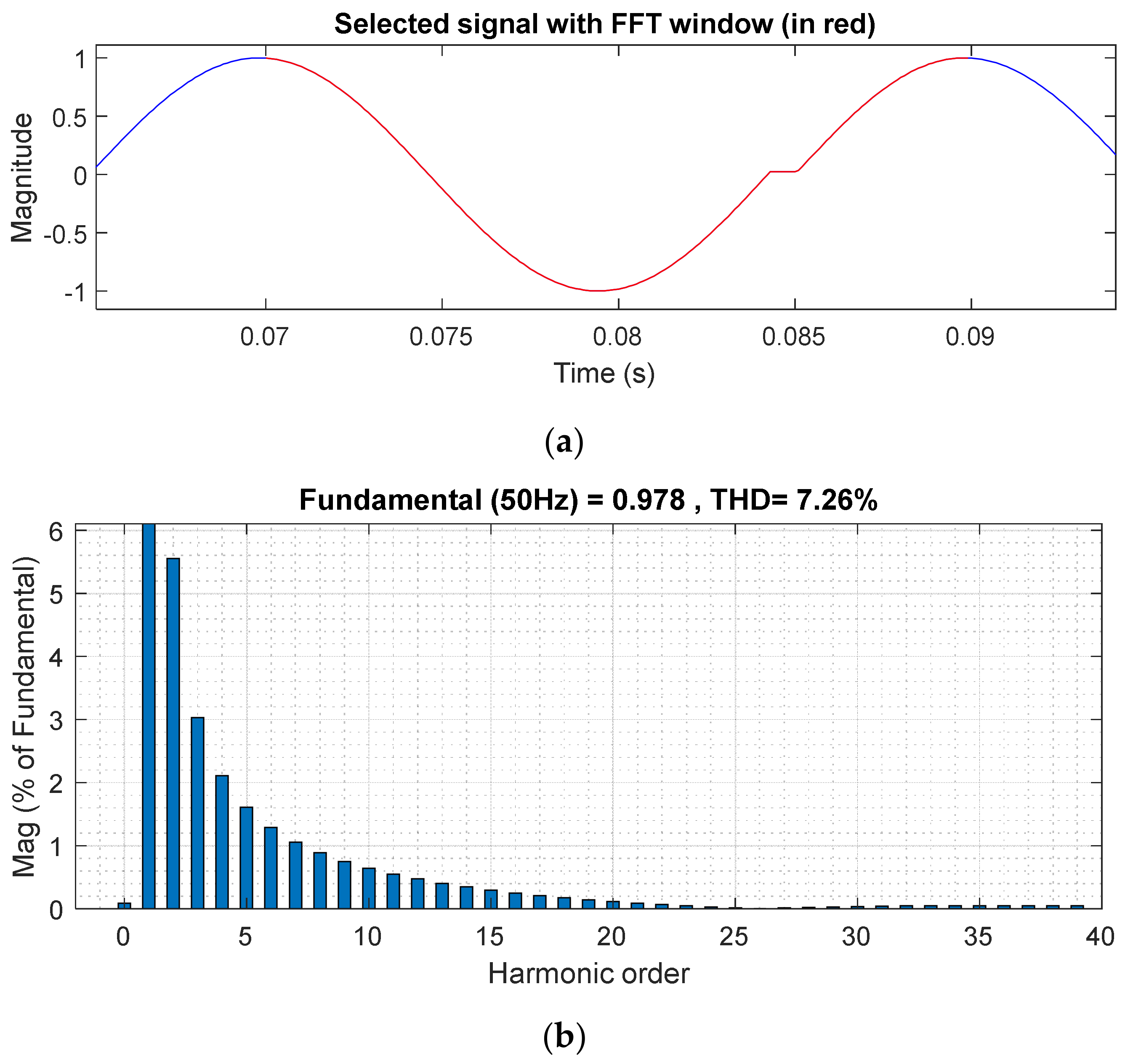
- The AFD method was characterised by a 4.91%-higher THD40 coefficient of the generated current waveform compared to the harmonic distortion of generated current in the AFDhs method.
- The spectrum of the current signal in the AFDhs method had a different distribution of individual components. In the AFD method, the amplitudes of successive harmonics (from 1 to 26) decreased. The first local minimum amplitude had the 26th harmonic. The harmonic amplitudes 26–40 grew higher. However, in the AFDhs method, the first local minimum was on the 18th harmonic. Higher-order harmonics (18–40) had lower amplitudes compared to the signal spectrum of the AFD method.
- The AFDhs method generated a distorted current with a slightly higher RMS value.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Ayadi, F.; Colak, I.; Garip, I.; Bulbul, H.I. Impacts of Renewable Energy Resources in Smart Grid. In Proceedings of the 2020 8th International Conference on Smart Grid (icSmartGrid), Paris, France, 17–19 June 2020; pp. 183–188. [Google Scholar] [CrossRef]
- Yan, L.; Yongning, C.; Haiyan, T.; Xinshou, T.; Zhankui, Z.; Jianqing, J. Common Focus and New Requirement on Technical Standards of Renewable Energy Grid Integration. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 3719–3723. [Google Scholar] [CrossRef]
- Lee, J.; Lee, I.W.; Kim, S.-H. Economic Analysis for Energy Trading System Connected with Energy Storage System and Renewable Energy Sources. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Dearborn, Michigan, 27–29 June 2016; pp. 693–696. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Yang, Y.; Yang, D.; Wang, X. Distributed Power-Generation Systems and Protection. Proc. IEEE 2017, 105, 1311–1331. [Google Scholar] [CrossRef] [Green Version]
- Bignucolo, F.; Cerretti, A.; Coppo, M.; Savio, A.; Turri, R. Effects of Energy Storage Systems Grid Code Requirements on Interface Protection Performances in Low Voltage Networks. Energies 2017, 10, 387. [Google Scholar] [CrossRef]
- Schwartfeger, L.; Santos-Martin, D.; Wood, A.; Watson, N.; Miller, A. Review of Distributed Generation Interconnection Standards. In Proceedings of the EEA Conference & Exhibition, Auckland, New Zeland, 25–27 June 2019; pp. 18–20. [Google Scholar]
- Verhoeven, B. Probability of Islanding in Utility Network Due to Grid Connected Photovoltaic Power Systems; Report of the International Energy Agency – Phtovoltaic Power Systems Programme T5-07:2002, 02; International Energy Agency: Paris, France, 2002. [Google Scholar]
- Worku, M.Y.; Hassan, M.A.; Maraaba, L.S.; Abido, M.A. Islanding Detection Methods for Microgrids: A Comprehensive Review. Mathematics 2021, 9, 3174. [Google Scholar] [CrossRef]
- Palm, S.; Schegner, P. Occurrence Probability and Prediction of Unintentional Islands Using Non Detection Zones. In Proceedings of the 2019 IEEE Power Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Woyte, A.; De Brabandere, K.; Van Dommelen, D.; Belmans, R.; Nijs, J. International Harmonization of Grid Connection Guidelines: Adequate Requirements for the Prevention of Unintentional Islanding. Prog. Photovolt. Res. Appl. 2003, 11, 407–424. [Google Scholar] [CrossRef]
- Kim, M.-S.; Haider, R.; Cho, G.-J.; Kim, C.-H.; Won, C.-Y.; Chai, J.-S. Comprehensive Review of Islanding Detection Methods for Distributed Generation Systems. Energies 2019, 12, 837. [Google Scholar] [CrossRef] [Green Version]
- Kahrobaee, M. Analysis of Local Anti-Islanding Detection Methods for Photovoltaic Generators in Distribution Systems; University of Nebraska: Lincoln, NE, USA, 2019. [Google Scholar]
- Bower, W.; Ropp, M. Evaluation of Islanding Detection Methods for Utility-Interactive Inverters in Photovoltaic Systems; Sandia National Laboratory: Albuquerque, NM, USA, 2002; pp. 2002–3591. [Google Scholar] [CrossRef] [Green Version]
- Persson, D. Islanding Detection in Power Electronic Converter Based Distributed Generation. Master’s Thesis, Lund University, Lund, Sweden, 2007. [Google Scholar]
- De Mango, F.; Liserre, M.; Dell’Aquila, A.; Pigazo, A. Overview of Anti-Islanding Algorithms for PV Systems. Part I: Passive Methods. In Proceedings of the 2006 12th International Power Electronics and Motion Control Conference, Portoroz, Slovenia, 30 August–1 September 2006; pp. 1878–1883. [Google Scholar] [CrossRef]
- Isa, A.I.M.; Mohamad, H.; Yasin, Z.M. Evaluation on Non-Detection Zone of Passive Islanding Detection Techniques for Synchronous Distributed Generation. In Proceedings of the 2015 IEEE Symposium on Computer Applications Industrial Electronics (ISCAIE), Langkawi, Malaysia, 12–14 April 2015; pp. 100–104. [Google Scholar] [CrossRef]
- Cebollero, J.A.; Cañete, D.; Martín-Arroyo, S.; García-Gracia, M.; Leite, H. A Survey of Islanding Detection Methods for Microgrids and Assessment of Non-Detection Zones in Comparison with Grid Codes. Energies 2022, 15, 460. [Google Scholar] [CrossRef]
- Kumar, K.M.; Naresh, M.; Singh, N.K.; Singh, A.K. A Passive Islanding Detection Approach for Distributed Generation Using Rate of Change of Negative Sequence Voltage and Current. In Proceedings of the 2016 IEEE Uttar Pradesh Section International Conference on Electrical, Computer and Electronics Engineering (UPCON), Varanasi, India, 9–11 December 2016; pp. 356–360. [Google Scholar] [CrossRef]
- Llonch-Masachs, M.; Heredero-Peris, D.; Chillón-Antón, C.; Montesinos-Miracle, D.; Villafafila-Robles, R. Impedance Measurement and Detection Frequency Bandwidth, a Valid Island Detection Proposal for Voltage Controlled Inverters. Appl. Sci. 2019, 9, 1146. [Google Scholar] [CrossRef] [Green Version]
- De Mango, F.; Liserre, M.; Dell’Aquila, A. Overview of Anti-Islanding Algorithms for PV Systems. Part II: Active Methods. In Proceedings of the 2006 12th International Power Electronics and Motion Control Conference, Portoroz, Slovenia, 30 August–1 September 2006; pp. 1884–1889. [Google Scholar]
- Desardén-Carrero, E.; Darbali-Zamora, R.; Aponte-Bezares, E.E. Analysis of Commonly Used Local Anti-Islanding Protection Methods in Photovoltaic Systems in Light of the New IEEE 1547-2018 Standard Requirements. In Proceedings of the 2019 IEEE 46th Photovoltaic Specialists Conference (PVSC), Chicago, IL, USA, 16–21 June 2019; pp. 2962–2969. [Google Scholar] [CrossRef]
- Voglitsis, D.; Papanikolaou, N.; Kyritsis, A.C. Incorporation of Harmonic Injection in an Interleaved Flyback Inverter for the Implementation of an Active Anti-Islanding Technique. IEEE Trans. Power Electron. 2017, 32, 8526–8543. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Kim, J.-H.; Han, B.-M. Islanding Detection Method for Inverter-Based Distributed Generation by Injecting Second Order Harmonic Current. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019-ECCE Asia), Busan, Korea, 27–31 May 2019; pp. 2860–2865. [Google Scholar]
- Zhu, X.; Shen, G.; Xu, D. Evaluation of AFD Islanding Detection Methods Based on NDZs Described in Power Mismatch Space; IEEE: San Jose, CA, USA, 2009; pp. 2733–2739. [Google Scholar] [CrossRef]
- Zheng, X.; Zhang, R.; Chen, X.; Sun, N. Improved Three-Phase AFD Islanding Detection Based on Digital Control and Non-Detection Zone Elimination. Energies 2018, 11, 2421. [Google Scholar] [CrossRef] [Green Version]
- Ko, M.-J.; Choy, I.; Choi, J.-Y.; Song, S.-H.; Lee, K.-O. Novel AFD Method of Islanding Detection with a Periodic Zero Current for Improving on Islanding Detection for Grid-Connected Photovoltaic Inverters. J. Korean Sol. Energy Soc. 2006, 26, 17–23. [Google Scholar]
- Abbas, A.S.; El-Sehiemy, R.A.; Abou El-Ela, A.; Ali, E.S.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Optimal Harmonic Mitigation in Distribution Systems with Inverter Based Distributed Generation. Appl. Sci. 2021, 11, 774. [Google Scholar] [CrossRef]
- Yafaoui, A.; Wu, B.; Kouro, S. Improved Active Frequency Drift Anti-Islanding Detection Method for Grid Connected Photovoltaic Systems. IEEE Trans. Power Electron. 2012, 27, 2367–2375. [Google Scholar] [CrossRef]
- Dmitruk, K. Predictive-SVM Control Method Dedicated to an AC/DC Converter with an LCL Grid Filter. Bull. Pol. Acad. Sci. Tech. Sci. 2020, 68, 1049–1056. [Google Scholar] [CrossRef]
- Falkowski, P.; Godlewska, A. Finite Control Set MPC of LCL-Filtered Grid-Connected Power Converter Operating under Grid Distortions. Bull. Pol. Acad. Sci. Tech. Sci. 2020, 68, 1069–1076. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Parallel RLC load (values per phase) | R = 32 (Ω) L = 100 (mH) C = 100 (μF) Qf = 1 (-) |
| Normal frequency range | 49.5 < fa < 50.5 (Hz) |
| Normal voltage phase range | 207 < UGridRMS < 253 (V) |
| Nominal grid parameters | 230/400 (V), 50 (Hz) |
| DC link voltage | 640 (V) |
| Grid side inductance L1 | 1.83 (mH) |
| Converter side inductance L2 | 4.57 (mH) |
| Grid filter capacitance C | 10 (μF) |
| Sampling time Ts | 200 (μs) |
| Modulation frequency | 5 (kHz) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dmitruk, K.; Sikorski, A. Implementation of the Improved Active Frequency Drift Anti-Islanding Method into the Three-Phase AC/DC Converter with the LCL Grid Filter. Energies 2022, 15, 1323. https://doi.org/10.3390/en15041323
Dmitruk K, Sikorski A. Implementation of the Improved Active Frequency Drift Anti-Islanding Method into the Three-Phase AC/DC Converter with the LCL Grid Filter. Energies. 2022; 15(4):1323. https://doi.org/10.3390/en15041323
Chicago/Turabian StyleDmitruk, Krzysztof, and Andrzej Sikorski. 2022. "Implementation of the Improved Active Frequency Drift Anti-Islanding Method into the Three-Phase AC/DC Converter with the LCL Grid Filter" Energies 15, no. 4: 1323. https://doi.org/10.3390/en15041323